@Tessedar
2015-02-22T14:09:03.000000Z
字数 1800
阅读 2582
Lego 88004 舵机参数
日期:2015年2月22日
作者:R. G.
LegoCar
第一组
视频及数据来源:这里(需要翻墙)。以下是视频介绍中的一部分:
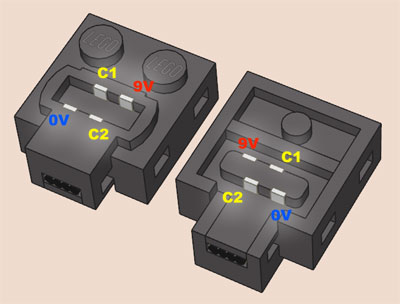
Power Functions Servo Motor turn through the 15 positions corresponding to the duty cycle of Arduino PWM signal:
Position -7 Duty Cycle: 100%, analogWrite(): 255, C1: +, C2: - (90 degrees counter-clockwise)
Position -6 Duty Cycle: 88.2%, analogWrite(): 225, C1: +, C2: -
Position -5 Duty Cycle: 76.0%, analogWrite(): 194, C1: +, C2: -
Position -4 Duty Cycle: 63.5%, analogWrite(): 162, C1: +, C2: -
Position -3 Duty Cycle: 50.1%, analogWrite(): 128, C1: +, C2: -
Position -2 Duty Cycle: 38.0%, analogWrite(): 97, C1: +, C2: -
Position -1 Duty Cycle: 25.8%, analogWrite(): 66, C1: +, C2: -
Position 0 Duty Cycle: 0%, analogWrite(): 0 (center)
Position 1 Duty Cycle: 25.8%, analogWrite(): 66, C1: -, C2: +
Position 2 Duty Cycle: 38.0%, analogWrite(): 97, C1: -, C2: +
Position 3 Duty Cycle: 50.1%, analogWrite(): 128, C1: -, C2: +
Position 4 Duty Cycle: 63.5%, analogWrite(): 162, C1: -, C2: +
Position 5 Duty Cycle: 76.0%, analogWrite(): 194, C1: -, C2: +
Position 6 Duty Cycle: 88.2%, analogWrite(): 225, C1: -, C2: +
Position 7 Duty Cycle: 100%, analogWrite(): 255, C1: -, C2: + (90 degrees clockwise)
数据整理如下:
| Position | Duty Cycle | analogWrite()[1] | C1[1] | C2 | note |
|---|---|---|---|---|---|
| -7 | 100% | 255 | + | - | 90 deg. counter-clockwise[1] |
| -6 | 88.2% | 225 | + | - | |
| -5 | 76.0% | 194 | + | - | |
| -4 | 63.5% | 162 | + | - | |
| -3 | 50.1% | 128 | + | - | |
| -2 | 38.0% | 97 | + | - | |
| -1 | 25.8% | 66 | + | - | |
| 0 | 0% | 0 | / | / | center |
| 1 | 25.8% | 66 | - | + | |
| 2 | 38.0% | 97 | - | + | |
| 3 | 50.1% | 128 | - | + | |
| 4 | 63.5% | 162 | - | + | |
| 5 | 76.0% | 194 | - | + | |
| 6 | 88.2% | 225 | - | + | |
| 7 | 100% | 255 | - | + | 90 deg. clockwise |
至于作者是如何获得这些数据的,尚不明确。
第二组
视频及数据来源:这里(需要翻墙)。在视频介绍中有提到:
Motor is controlled by PWM signals, with a frequency of 1150Hz, and duty cycles of: 0%, 26.6%, 38.9%, 51.2%, 63.0%, 75.0%, 87.2% and 100%.
在视频中,作者展示了通过万用表及示波器测得的PWM波形占空比。其中,万用表测得的数据如下:
Level 1 - 26.2%
Level 2 - 38.7%
Level 3 - 51.2%
Level 4 - 63.7%
Level 5 - 76.2%
Level 6 - 88.7%
Level 7 - 100.0%
用示波器测得的数据如下:
Level 1 - 27%
Level 2 - 39%
Level 3 - 51%
Level 4 - 63%
Level 5 - 75%
Level 6 - 87%
Level 7 - 100%
更多相关内容,请查看:
- 国外玩家Philippe对Power Function系列的介绍以及对舵机的测试;
- 另外一个玩家对Lego官方红外遥控器的测试