@wudawufanfan
2016-11-20T14:15:57.000000Z
字数 10457
阅读 897
The billiard problem
未分类
Introduction
A ball moving without friction on a horizontal table and imagine that there are walls at the edges of the table that reflect the ball perfectly and that there is no frictional force between the ball and the table.The ball is given some initial velocity,and we are to calculate and understand the resulting trajectory.This is konwn as the stadium billiard problem.

Text
1、
Except for the collisions with the walls,the motion of the billiard is quite simple.Between collisions the velocity is constant so we have
and the Euler solution gives an exact description of the motion across the table.Now we tend to the calculation for the the collisions
Once we have the components of we can reflect the billiard.A mirrorlike reflection reverses the perpendicular component of velocity,but leaves the parallel component unchanged.Hence,the velocity after reflection from the wall is
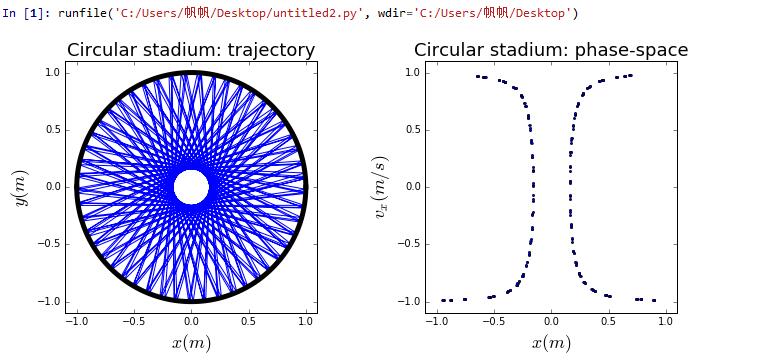
2、The trajectory of a billiard on a square table and the corresponding phase-space plots of versus x.
Firstly,consider a square table with a circular interior wall located in the center and a elliptical-bounded boundary.
from numpy import *import matplotlib.pyplot as plt# class: BILLIARD solves for a stadium-shaped boundary# where:# x0, y0, vx0, vy0: initial position of billiard# dt, time : time step and total time# alpha: the length cube regionclass BILLIARD(object):def __init__(self,_alpha=0.,_r=1.,_x0=0.2,_y0=0.,_vx0=0.6,_vy0=0.8,_dt=0.001,_time=300):self.alpha, self.r, self.dt, self.time, self.n = _alpha, _r, _dt, _time, int(_time/_dt)self.x, self.y, self.vx, self.vy = [_x0], [_y0], [_vx0], [_vy0]def cal(self): # use Euler method to solve billiard motionfor i in range(self.n):self.nextx = self.x[-1]+self.vx[-1]*self.dtself.nexty = self.y[-1]+self.vy[-1]*self.dtself.nextvx, self.nextvy = self.vx[-1], self.vy[-1]if (self.nexty>self.alpha*self.r and self.nextx**2+(self.nexty-self.alpha*self.r)**2>self.r**2) \or (self.nexty<-self.alpha*self.r and self.nextx**2+(self.nexty+self.alpha*self.r)**2>self.r**2) \or (self.nextx>self.r) \or (self.nextx<-self.r):self.nextx=self.x[-1]self.nexty=self.y[-1]while not( \(self.nexty>self.alpha*self.r and self.nextx**2+(self.nexty-self.alpha*self.r)**2>self.r**2) \or (self.nexty<-self.alpha*self.r and self.nextx**2+(self.nexty+self.alpha*self.r)**2>self.r**2) \or (self.nextx>self.r) \or (self.nextx<-self.r)):self.nextx=self.nextx+self.nextvx*self.dt/100self.nexty=self.nexty+self.nextvy*self.dt/100if self.nexty>self.alpha*self.r:self.v = array([self.nextvx,self.nextvy])self.norm = 1/self.r*array([self.nextx, self.nexty-self.alpha*self.r])self.v_perpendicular = dot(self.v, self.norm)*self.normself.v_parrallel = self.v-self.v_perpendicularself.v_perpendicular= -self.v_perpendicularself.nextvx, self.nextvy= (self.v_parrallel+self.v_perpendicular)[0],(self.v_parrallel+self.v_perpendicular)[1]elif self.nexty<-self.alpha*self.r:self.v = array([self.nextvx,self.nextvy])self.norm = 1/self.r*array([self.nextx, self.nexty+self.alpha*self.r])self.v_perpendicular = dot(self.v, self.norm)*self.normself.v_parrallel = self.v-self.v_perpendicularself.v_perpendicular= -self.v_perpendicularself.nextvx, self.nextvy= (self.v_parrallel+self.v_perpendicular)[0],(self.v_parrallel+self.v_perpendicular)[1]else:self.nextvx, self.nextvy= -self.nextvx, self.nextvyself.x.append(self.nextx)self.y.append(self.nexty)self.vx.append(self.nextvx)self.vy.append(self.nextvy)def plot_position(self,_ax): # give trajectory plot_ax.plot(self.x,self.y,'-b',label=r'$\alpha=$'+' %.2f'%self.alpha)_ax.plot([self.r]*10,linspace(-self.alpha*self.r,self.alpha*self.r,10),'-k',lw=5)_ax.plot([-self.r]*10,linspace(-self.alpha*self.r,self.alpha*self.r,10),'-k',lw=5)_ax.plot(self.r*cos(linspace(0,pi,100)),self.r*sin(linspace(0,pi,100))+self.alpha*self.r,'-k',lw=5)_ax.plot(self.r*cos(linspace(pi,2*pi,100)),self.r*sin(linspace(pi,2*pi,100))-self.alpha*self.r,'-k',lw=5)def plot_phase(self,_ax,_secy=0): # give phase-space plotself.secy=_secyself.phase_x, self.phase_vx = [], []for i in range(len(self.x)):if abs(self.y[i]-self.secy)<1E-3 :self.phase_x.append(self.x[i])self.phase_vx.append(self.vx[i])_ax.plot(self.phase_x,self.phase_vx,'ob',markersize=2,label=r'$\alpha=$'+' %.2f'%self.alpha)# give a trajectory and phase space plotfig= plt.figure(figsize=(10,10))ax1=plt.axes([0.1,0.55,0.35,0.35])ax2=plt.axes([0.6,0.55,0.35,0.35])ax3=plt.axes([0.1,0.1,0.35,0.35])ax4=plt.axes([0.6,0.1,0.35,0.35])ax1.set_xlim(-1.1,1.1)ax2.set_xlim(-1.1,1.1)ax3.set_xlim(-1.1,1.1)ax4.set_xlim(-1.1,1.1)ax1.set_ylim(-1.1,1.1)ax2.set_ylim(-1.1,1.1)ax3.set_ylim(-1.1,1.1)ax4.set_ylim(-1.1,1.1)ax1.set_xlabel(r'$x (m)$',fontsize=18)ax1.set_ylabel(r'$y (m)$',fontsize=18)ax1.set_title('Circular stadium: trajectory',fontsize=18)ax2.set_xlabel(r'$x (m)$',fontsize=18)ax2.set_ylabel(r'$v_x (m/s)$',fontsize=18)ax2.set_title('Circular stadium: phase-space',fontsize=18)ax3.set_xlabel(r'$x (m)$',fontsize=18)ax3.set_ylabel(r'$y (m)$',fontsize=18)ax3.set_title('Billiard'+r'$\alpha=0.05$'+': trajectory',fontsize=18)ax4.set_xlabel(r'$x (m)$',fontsize=18)ax4.set_ylabel(r'$v_x (m/s)$',fontsize=18)ax4.set_title('Billiard '+r'$\alpha=0.05$'+': phase-space',fontsize=18)cmp=BILLIARD()cmp.cal()cmp.plot_position(ax1)cmp.plot_phase(ax2)cmp=BILLIARD(0.05)cmp.cal()cmp.plot_position(ax3)cmp.plot_phase(ax4)plt.show()
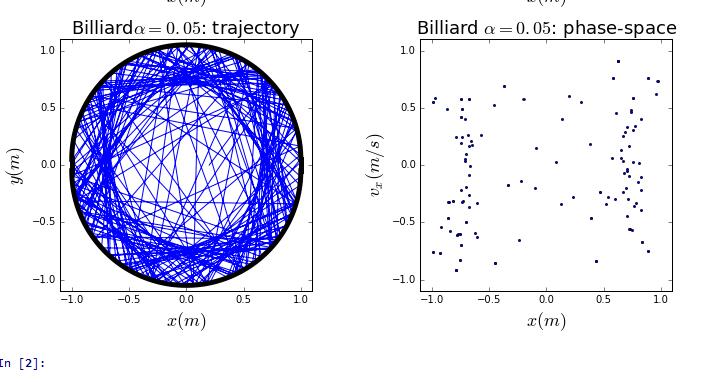
from numpy import *import matplotlib.pyplot as plt# class: BILLIARD solves for a elliptical-bounded boundary# where:# x0, y0, vx0, vy0: initial position of billiard# dt, time : time step and total timeclass BILLIARD(object):def __init__(self,_x0=sqrt(2),_y0=0.,_vx0=0,_vy0=1,_dt=0.001,_time=500):self.dt, self.time, self.n = _dt, _time, int(_time/_dt)self.x, self.y, self.vx, self.vy = [_x0], [_y0], [_vx0], [_vy0]def cal(self): # use Euler method to solve billiard motionfor i in range(self.n):self.nextx = self.x[-1]+self.vx[-1]*self.dtself.nexty = self.y[-1]+self.vy[-1]*self.dtself.nextvx, self.nextvy = self.vx[-1], self.vy[-1]if self.nextx**2/3+self.nexty**2>1:self.nextx=self.x[-1]self.nexty=self.y[-1]while not(self.nextx**2/3+self.nexty**2>1):self.nextx=self.nextx+self.nextvx*self.dt/100self.nexty=self.nexty+self.nextvy*self.dt/100self.norm=array([self.nextx,3*self.nexty])self.norm=self.norm/sqrt(dot(self.norm,self.norm))self.v=array([self.nextvx,self.nextvy])self.v_perpendicular=dot(self.v,self.norm)*self.normself.v_parrallel=self.v-self.v_perpendicularself.v_perpendicular=-self.v_perpendicular[self.nextvx,self.nextvy]=self.v_parrallel+self.v_perpendicularself.x.append(self.nextx)self.y.append(self.nexty)self.vx.append(self.nextvx)self.vy.append(self.nextvy)def plot_position(self,_ax): # give trajectory plot_ax.plot(self.x,self.y,'-b',label='Ellipse'+r'$a=2,b=1$')_ax.plot(sqrt(3)*cos(linspace(0,2*pi,200)),sin(linspace(0,2*pi,200)),'-k',lw=5)def plot_phase(self,_ax,_secy=0): # give phase-space plotself.secy=_secyself.phase_x, self.phase_vx = [], []for i in range(len(self.x)):if abs(self.y[i]-self.secy)<1E-3 and abs(self.vx[i])<0.95:self.phase_x.append(self.x[i])self.phase_vx.append(self.vx[i])_ax.plot(self.phase_x,self.phase_vx,'ob',markersize=2,label='Ellipse'+r'$a=2,b=1$')# give a trajectory and phase space plotfig= plt.figure(figsize=(10,4))ax1=plt.axes([0.1,0.15,0.35,0.7])ax2=plt.axes([0.6,0.15,0.35,0.7])ax1.set_xlim(-2,2)ax1.set_ylim(-1.1,1.1)ax2.set_xlim(-2,2)ax2.set_ylim(-1.1,1.1)ax1.set_title('Elliptical boundary: '+r'$a^2 =3,b^2 = 1$',fontsize=18)ax2.set_title('Phase-space: '+r'$a^2 =3,b^2 = 1$',fontsize=18)ax1.set_xlabel(r'$x(m)$',fontsize=18)ax1.set_ylabel(r'$y(m)$',fontsize=18)ax2.set_xlabel(r'$x(m)$',fontsize=18)ax2.set_ylabel(r'$v_x (m/s)$',fontsize=18)cmp=BILLIARD()cmp.cal()cmp.plot_position(ax1)cmp.plot_phase(ax2)plt.show()
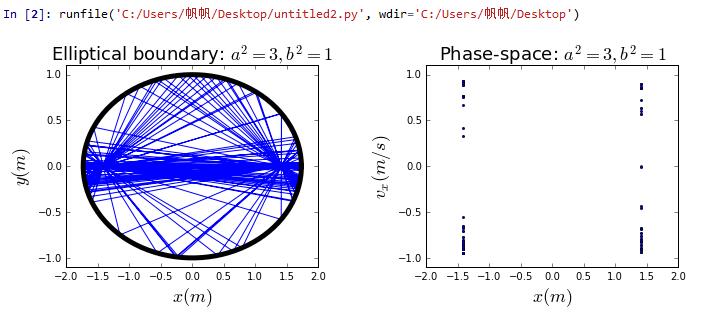
if the shape of boundary is line,the the code for python is easy without losing generalizability.The only one need to calculate is the tranformation of velocity.Here we set four boundaries are
y(x+3)
y-(x-3)
y2.5
y0。
When x0, we only need to use the boundaries y-(x-3) and y2.5
When the particle reach the boundary -(x-3),
line y=-(x-3)'s normal unit vector is =(cos,sin), while tan=
=i+j)•(cosi+sinj)(cos,sin)
The line's direction unit vector is (cos,sin), while tan=-
=(i+j)•(cosi+sinj)(cos,sin)
so the velocity after colision is
-
import numpy as npfrom pylab import *x=[0]y=[1]vx,vy=2.3,3time,i,dt=0,0,0.001sdt=0.00001velocity=[4]while time<=300:X=x[i]+vx*dtY=y[i]+vy*dtif Y>0 and Y<2.5:if X>=0:if Y<-X*4.0/3.0+4:x.append(X)y.append(Y)velocity.append(vx)else:x1=x[i]+vx*sdty1=y[i]+vy*sdtif y1<-x1*4.0/3.0+4:x.append(x1)y.append(y1)velocity.append(vx)else:char1=-vx*(9.0/41.0)-vy*(40.0/41.0)char2=-vx*(40.0/41.0)+vy*(9.0/41.0)vx=char1vy=char2x.append(x[i]+vx*sdt)y.append(y[i]+vy*sdt)velocity.append(vx)if X<0:if Y<X*4.0/3.0+4:x.append(X)y.append(Y)velocity.append(vx)else:x2=x[i]+vx*sdty2=y[i]+vy*sdtif y2<x2*4.0/3.0+4:x.append(x2)y.append(y2)velocity.append(vx)else:char3=-vx*(9/41)+vy*(40/41)char4=vx*(40/41)+vy*(9/41)vx=char3vy=char4x.append(x[i]+vx*sdt)y.append(y[i]+vy*sdt)velocity.append(vx)if Y>=2.5:x4=x[i]+vx*sdty4=y[i]+vy*sdtif y4<2.5:x.append(x4)y.append(y4)velocity.append(vx)else:vy=-vyx.append(x[i]+vx*sdt)y.append(y[i]+vy*sdt)velocity.append(vx)if Y<=0:x3=x[i]+vx*sdty3=y[i]+vy*sdtif y3>0:x.append(x3)y.append(y3)velocity.append(vx)else:vy=-vyx.append(x[i]+vx*sdt)y.append(y[i]+vy*sdt)velocity.append(vx)time=time+dti=i+1plt.figure(figsize=(16,5.5))subplot(1,2,1)plt.title("vx0=2.3,vy0=3")plt.xlabel("x")plt.ylabel("y")plt.xticks([-3,-2,-1,0,1,2,3])plt.yticks([0,1,2,3,4])plt.xlim(-3,3)plt.ylim(0,4)plt.plot([1.125,3],[2.5,0],color="blue",label="isosceles triangle",linewidth=2)plt.plot([-1.125,1.125],[2.5,2.5],color="blue",linewidth=2)plt.plot([-3,-1.125],[0,2.5],color="blue",linewidth=2)plt.plot([-3,3],[0,0],color="blue",linewidth=2)plt.plot(x,y,label="trajectory",color="red")plt.scatter(0,1,color="black",alpha=1,linewidth=4,label="initial")plt.legend()subplot(1,2,2)plt.xlabel("x")plt.ylabel("vx")for i in range(1000):if 1000*i<=len(x):plt.scatter(x[1000*i],velocity[1000*i])plt.show()
We can change the velocity to get different trajectory in which some is chaoic
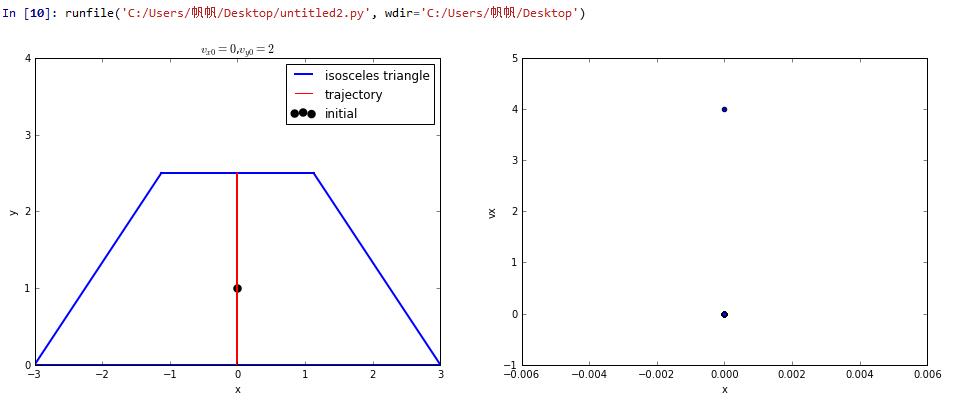
the velocity is vx=0,vy=2
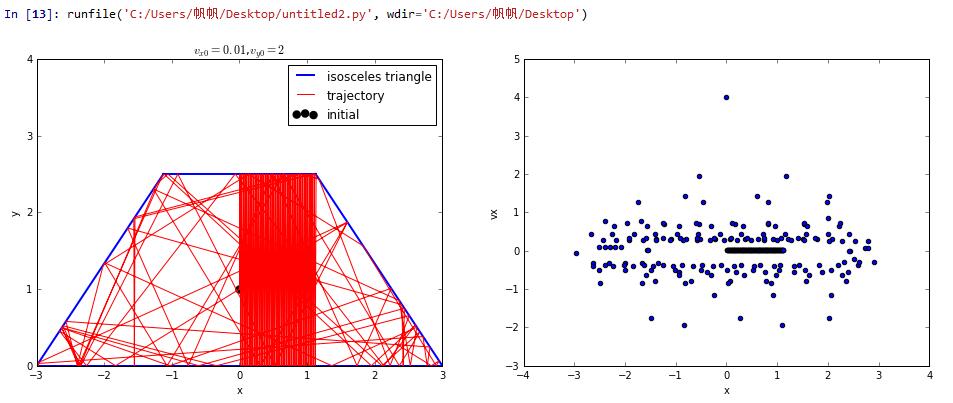
the velocity is vx=0.01,vy=2
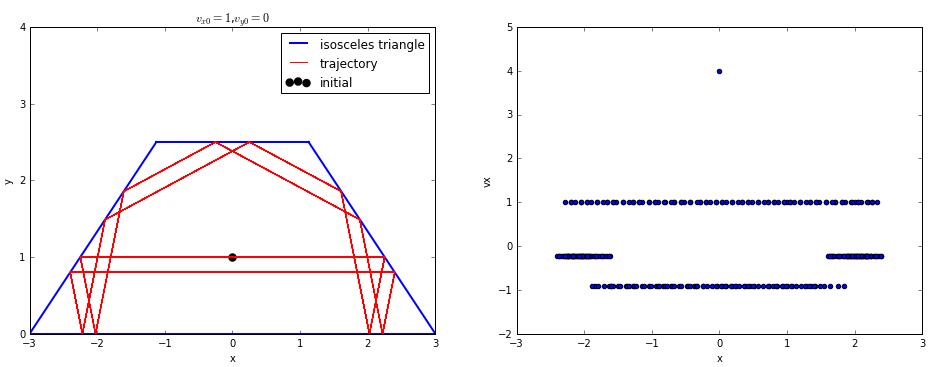
the velocity is vx=1,vy=0
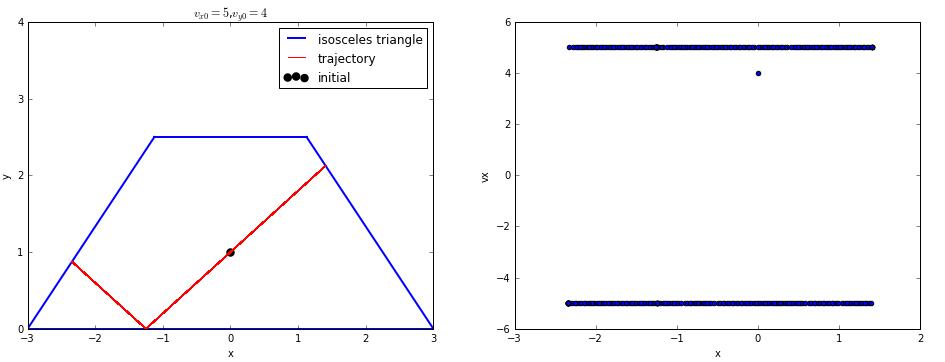
the velocity is vx=5,vy=4
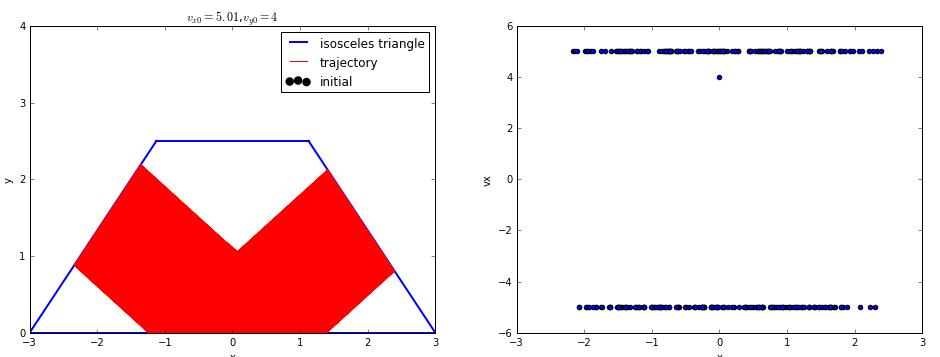
the velocity is vx=5.01,vy=4
we can see a small change to initial condition may cause big difference to trajectory.
Conclusion
For any realistically shaped container,such motion is likely to be chaotic and thus unpredictable.
Thanks
cheng yaoyang's code.
wu yuqiao's vpython.
