@2014301020054
2016-10-30T16:49:49.000000Z
字数 4910
阅读 587
Exercise_6:The trajectory of a cannon shell_2
physics python
Abstract
作业L1 2.10题强化版(引入迎面风阻)
作业L2 2.10题进一步升级,发展“超级辅助精确打击系统”(考虑炮弹初始发射的时候发射角度误差正负2度,速度有5%的误差,迎面风阻误差10%,以炮弹落点与打击目标距离差平方均值最小为优胜)
2.10 Generalize the program developed for the previous problem so that it can deal with situations in which the target is at a different altitude than the cannon. Consider cases in which the target is higher and lower than the cannon. Also investigate how the minimum firing velocity required to hit the target varies as the altitude of the target is varied.
Background
The Euler method we used to treat the bicycle problem can easily be generalized to deal with motion in two spatial dimensions. To be specific, we consider a projectile such as a shell shot by a cannon. We have a very large cannon in mind, and the large size will determine some of the important physics...
Main body
作业L1 2.10题强化版(引入迎面风阻)
作业L2 2.10题进一步升级,发展“超级辅助精确打击系统”(考虑炮弹初始发射的时候发射角度误差正负2度,速度有5%的误差,迎面风阻误差10%,以炮弹落点与打击目标距离差平方均值最小为优胜)
2.10 Generalize the program developed for the previous problem so that it can deal with situations in which the target is at a different altitude than the cannon. Consider cases in which the target is higher and lower than the cannon. Also investigate how the minimum firing velocity required to hit the target varies as the altitude of the target is varied.
Solution
We set several initial target ranges and initial target heights first. Then we calculate the trajectory of the cannon shell which can fire on the target with higher accuracy. Finally we estimate the strike level.
We also print several parameters
abs(xi[-1] - self.xt)、abs(yi[-1] - self.yt)and((xi[-1] - self.xt)**2+(yi[-1] - self.yt)**2)**0.5to show the accuracy.
We firstly define a function
pre_run_testto calculate the range ofdaanddxdyto save the operation time.
def pre_run_test(self):_a= 0.001*math.pida= 0.001*math.pidxdy=1.0aa=[]t=1a_max=0.5 * math.piwhile(t<8):can2=0while (_a < a_max):can = 0vx = math.cos(_a) * self.vvy = math.sin(_a) * self.vxi = [0]yi = [0]while (yi[-1] >= 0):xi.append(xi[-1] + self.dt * vx)yi.append(yi[-1] + self.dt * vy)v = ((vx + self.Vw)**2+vy**2)**0.5vx = vx \- math.exp(-yi[-1] / 10) * self.b_m * v * vx * self.dtvy = vy \- self.g * self.dt \- math.exp(-yi[-1] / 10) * self.b_m * v * vy * self.dtif (abs(xi[-1] - self.xt) < dxdy and abs(yi[-1] - self.yt) < dxdy):can = 1breakif can:aa.append(_a)can2=2elif can==0 and can2>1: break_a = _a + daif aa==[]:if t==1 :print "无法命中目标"else:break_a=min(aa)-daa_max=max(aa)+dada=da/5dxdy=dxdy/4_aa =aaaa=[]print tt+=1self.a= 0.5*max(_aa)+0.5*min(_aa)self.dxdy=dxdy*4
The running results are normal.
And the total codes can be typed like this:
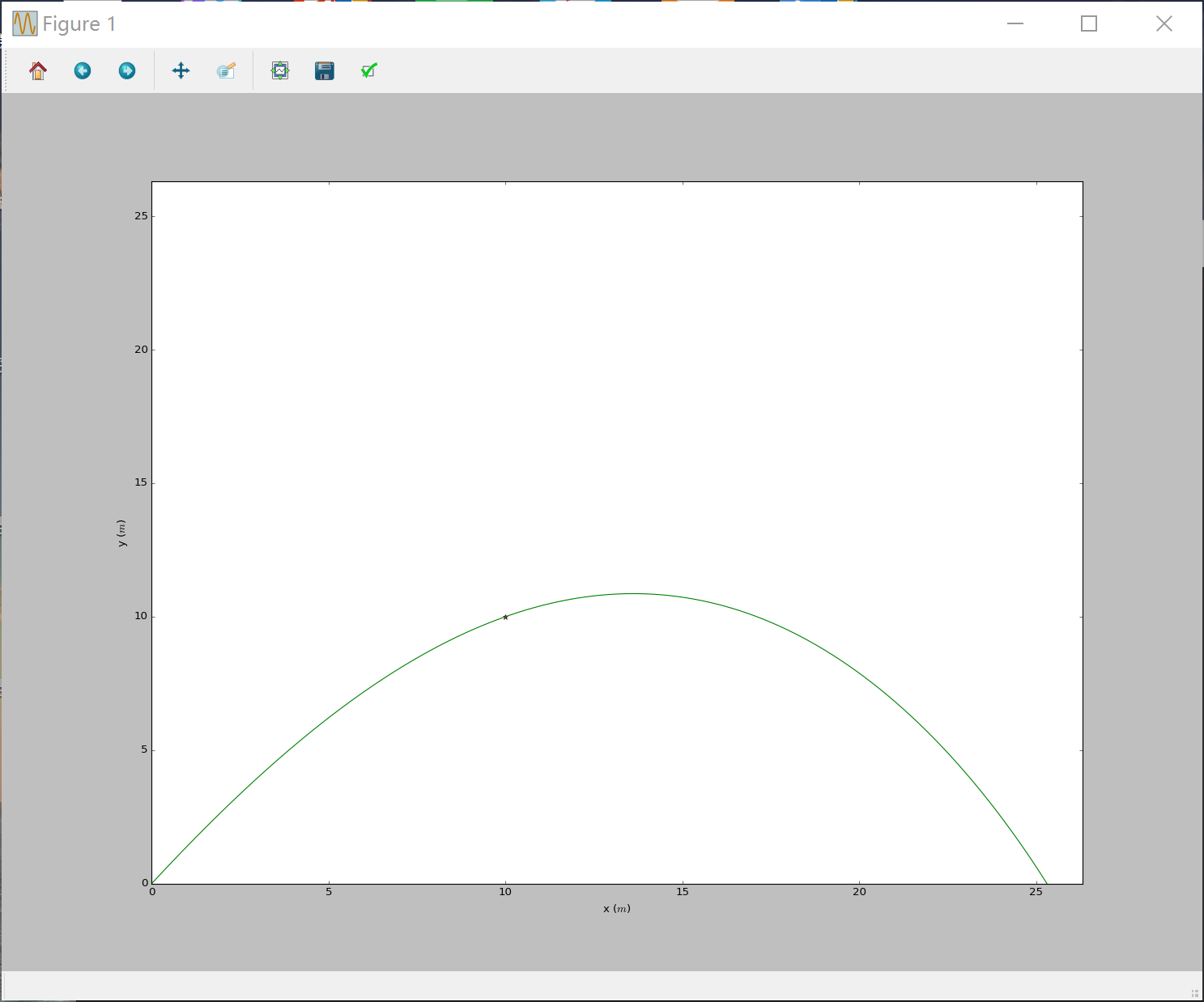
target_range=10,target_height=10
#coding:utf-8import pylab as plimport mathimport randomclass cannon_shell:def __init__(self,initial_velocity=0.7,g=0.0098,range=0,height=0,target_range=10,target_height=10,time_step=0.005,\da=0.00001*math.pi,\wind_speed=0.01,accuracy=0.01):self.v=initial_velocityself.Vw=wind_speedself.a=math.atan((target_height-height)/(target_range-range))self.g=gself.dt=time_stepself.da=daself.x=[range]self.y=[height]self.xt=target_rangeself.yt=target_heightself.b_m=0.04self.ture_x=[]self.ture_y=[]self.dxdy=accuracydef pre_run_test(self):_a= 0.001*math.pida= 0.001*math.pidxdy=1.0aa=[]t=1a_max=0.5 * math.piwhile(t<8): #减少计算时间用can2=0 #辅助跳出循环用while (_a < a_max):can = 0 # 判断命中用vx = math.cos(_a) * self.vvy = math.sin(_a) * self.vxi = [0]yi = [0]while (yi[-1] >= 0):xi.append(xi[-1] + self.dt * vx)yi.append(yi[-1] + self.dt * vy)v = ((vx + self.Vw)**2+vy**2)**0.5vx = vx \- math.exp(-yi[-1] / 10) * self.b_m * v * vx * self.dtvy = vy \- self.g * self.dt \- math.exp(-yi[-1] / 10) * self.b_m * v * vy * self.dtif (abs(xi[-1] - self.xt) < dxdy and abs(yi[-1] - self.yt) < dxdy): # 判断是否命中can = 1breakif can: #找出近似的角度aa.append(_a)can2=2elif can==0 and can2>1: break #跳出之后的多余循环_a = _a + daif aa==[]:if t==1 :print "无法命中目标" #第一次循环时如果无法命中则判断无法命中目标else:break #输出当前条件下可以达成的最高精度,使程序不至报错_a=min(aa)-daa_max=max(aa)+dada=da/5dxdy=dxdy/4_aa =aa #将本次正确计算的结果保存在_aa中aa=[]print tt+=1self.a= 0.5*max(_aa)+0.5*min(_aa)self.dxdy=dxdy*4def run(self): #绘制图象用_a = self.avx = math.cos(_a) * self.vvy = math.sin(_a) * self.vxi = [0]yi = [0]t=0while (yi[-1] >= 0):t=t+self.dtxi.append(xi[-1] + self.dt * vx)yi.append(yi[-1] + self.dt * vy)v = ((vx + self.Vw) ** 2 + vy ** 2) ** 0.5vx = vx \- math.exp(-yi[-1] / 10) * self.b_m * v * vx * self.dtvy = vy \- self.g * self.dt \- math.exp(-yi[-1] / 10) * self.b_m * v * vy * self.dtif (abs(xi[-1] - self.xt) < self.dxdy and abs(yi[-1] - self.yt) < self.dxdy): # 判断是否命中print abs(xi[-1] - self.xt), abs(yi[-1] - self.yt)print abs(xi[-1]), yi[-1],tprint ((xi[-1] - self.xt)**2+(yi[-1] - self.yt)**2)**0.5self.ture_x = xiself.ture_y = yidef show_result(self):x_y=self.ture_y+self.ture_xxy=max(x_y)+1pl.plot(self.xt,self.yt,'r*')pl.plot(self.ture_x,self.ture_y,color="green",linewidth=1)pl.xlabel('x ($m$)')pl.ylim(0, xy)pl.xlim(0, xy)pl.ylabel('y ($m$)')pl.show()a=cannon_shell()a.pre_run_test()a.run()a.show_result()
- Running result_1
!number_1
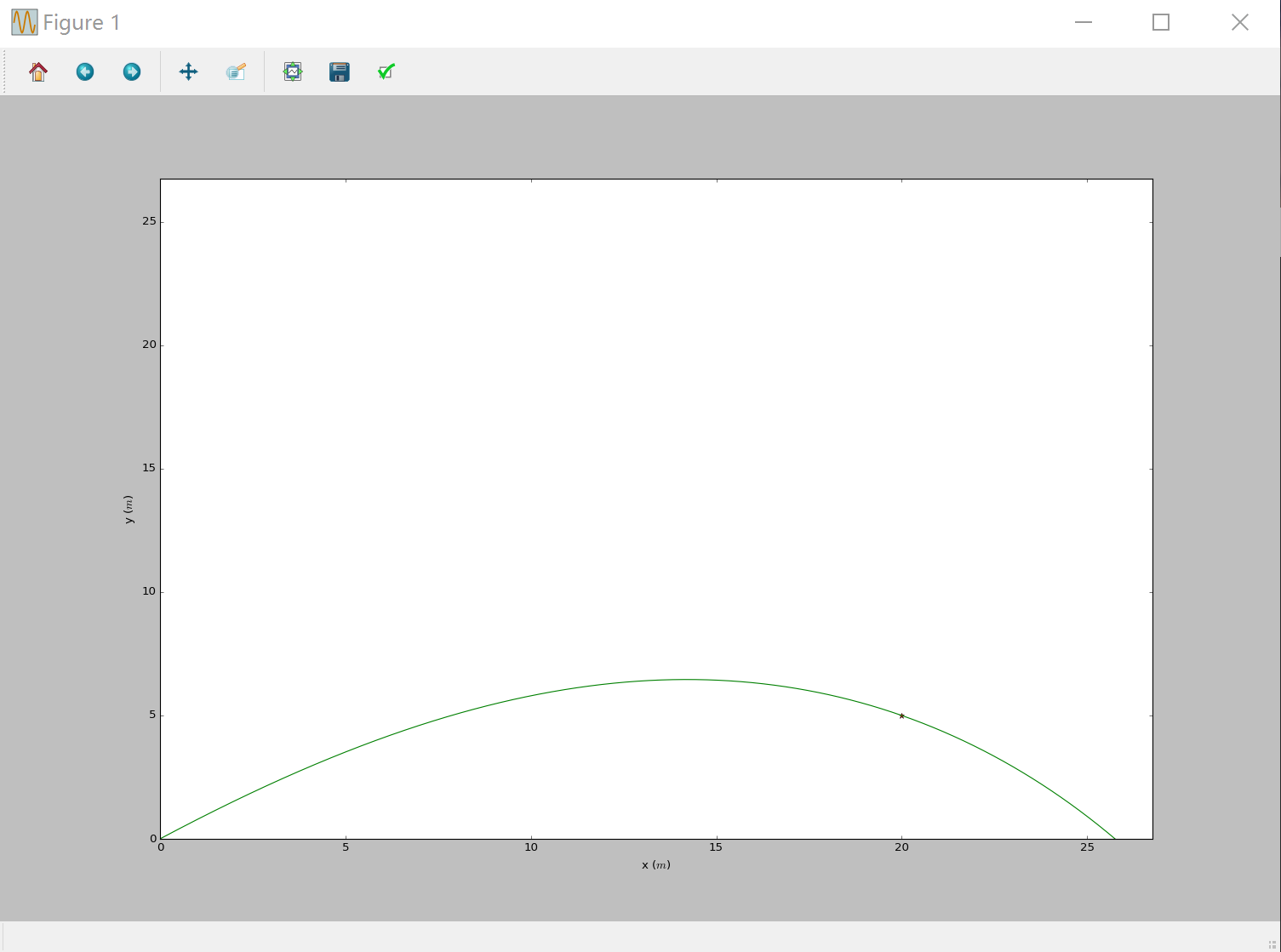
target_range=20,target_height=5
Then initial codes can be modified like this:
def __init__(self,initial_velocity=0.7,g=0.0098,range=0,height=0,target_range=20,target_height=5,time_step=0.005,\da=0.00001*math.pi,\wind_speed=0.01,accuracy=0.01):.........
- Running result_2
Conclusion
The final number of the running result is variance.
The initial number can also be set to many other parameters as you like. And the variance can be given easily.
Acknowledgment
Zou zhiyuan
