@Velaciela
2017-08-17T14:54:36.000000Z
字数 3468
阅读 271
一维卷积的SASS实现
CUDA
对应代码和工程,见GitHub。
1、一维卷积计算过程
线性卷积:
设x(n)长度为N1,h(n)长度为N2 , 则y(n)长为 N=N1+N2-1
为方便表示,在序列x(n)后添N2-1个0 ,使x(n)的长度变为 N
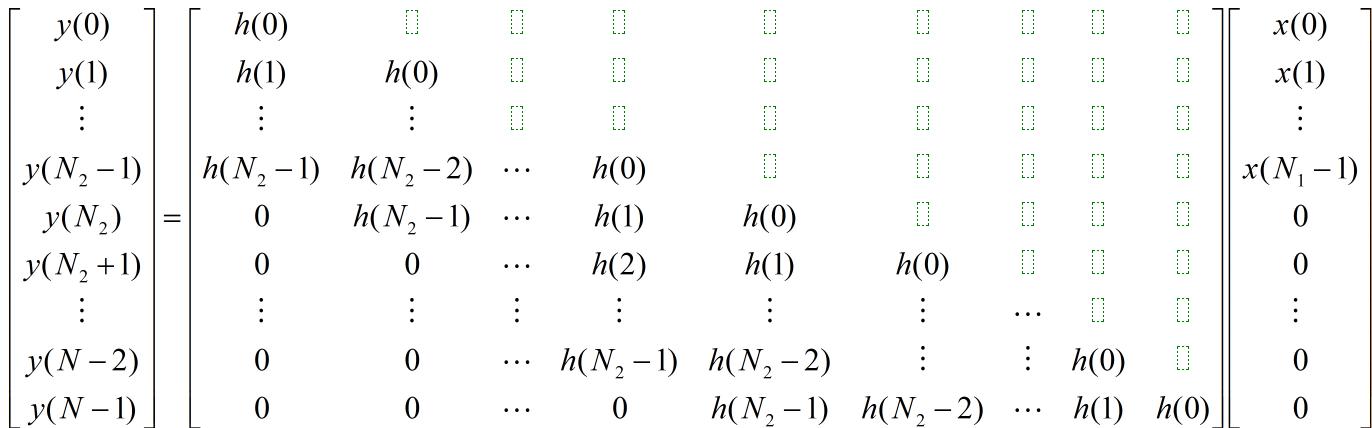
卷积公式 :
可用矩阵表示为:
一个简单的计算过程示意:
x(n)=[4,3,2,1]
h(x)=[3,2,1]
y(n)=x(n)*h(n)
x | 4 3 2 1 || |y0 | 1 2 3 | = 4*3 = 12y1 | 1 2 3 | = 4*2 + 3*3 = 17y2 | 1 2 3 | = 4*1 + 3*2 + 2*3 = 16y3 | 1 2 3 | = 3*1 + 2*2 + 1*3 = 10y4 | 1 2 3 | = 2*1 + 1*2 = 4y5 | 1 2 3 | = 1*1 = 1
为保证局部性:
在实现时,卷积核H的数据先放到片上
(H点数较小时直接放到寄存器,点数稍大可放在共享内存,过大时分批从片外内存读取)
实际的原始数据X,点数较大,分块(blocking)处理。
Y的计算不按照上例中的一次性计算 。
而是 多次乘加 得到结果 :
//Y初始化为0regX = shareadX[0]; //共享内存读取xY0 += regX*H1;Y1 += regX*H2;Y2 += regX*H3;regX = shareadX[1];Y1 += regX*H1;Y2 += regX*H2;Y3 += regX*H3;...//计算完成后把Y 在共享内存reshape 然后放回片外
上例每次读一个X。实现时,X批量读入,计算掩盖访存延迟。
2、两个实现:16点卷积与1024点卷积
算法分析
| 算法 | 卷积 |
|---|---|
| 数据量 | N*2 (输入X / 输出Y / H较小不计入) |
| 计算量 | N*N2*2 (乘加按两个指令计算) |
| 硬件 | GTX970 |
| 峰值计算能力 | 1.25GHz * 1664cores * 2 = 4160 GFLOPS(实测达到) |
| 访存带宽: | 224GB/S (实测连续访存140GB/s ,即35G/s的FP32数据) |
(即一维卷积计算算法强度与卷积核长度直接相关: 16点卷积计算强度为16, 1024点卷积计算强度为1024)
所以16点卷积计算 :受限于带宽 (16 < 116.8 访存密集)
1024点卷积计算 : 受限于核心计算能力(1024 > 116.8 计算密集)
所有算法都可以从这一角度,划分为上述两个类型之一。
计算密集的算法,可以针对硬件架构进行优化。
16点卷积
一维卷积核H:16 float (直接拷贝到寄存器)
输入数据量X:1024000 float
输出数据量Y:1024000 + 16 float (最后16个Y为了方便,没有进行计算)
线程结构 : 32个thread一个blcok,每个thread计算16点Y,一共需要2000个block。
片上存储 : 分配544 float * 4 bytes = 2176 bytes 大小的共享内存空间用于存储。
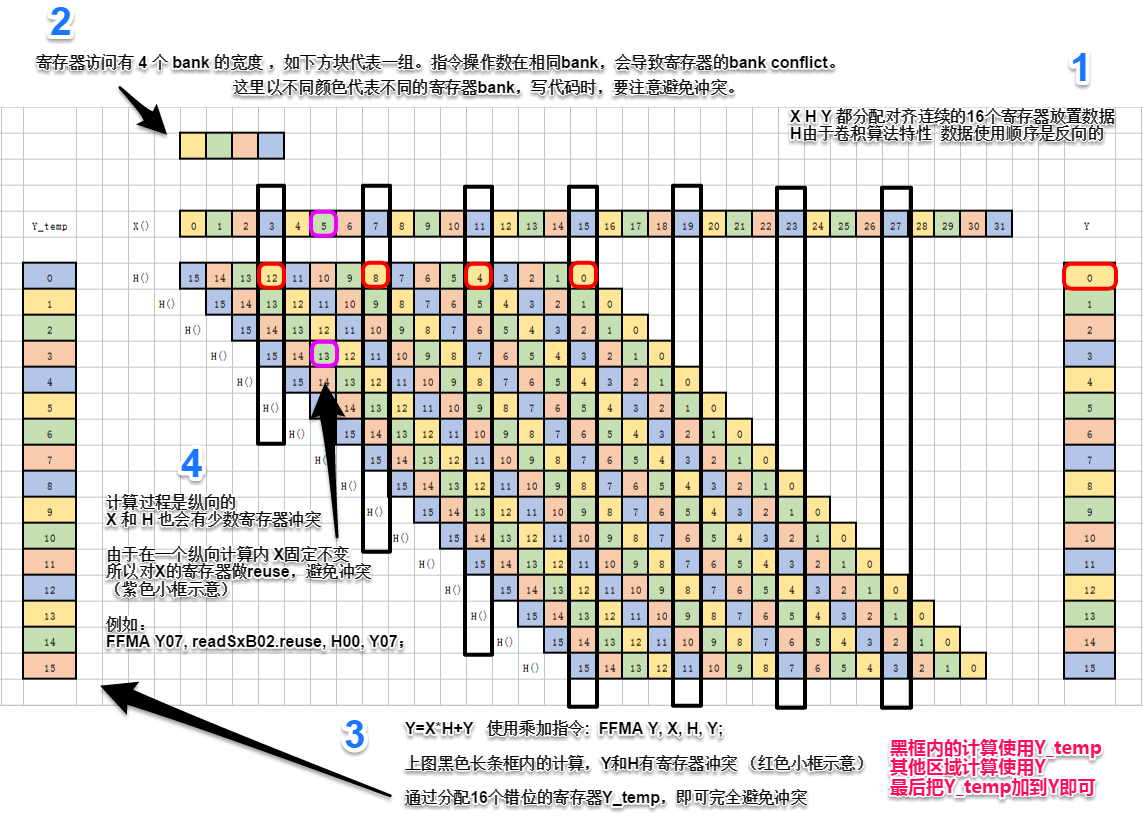
存储结构
Shared存储
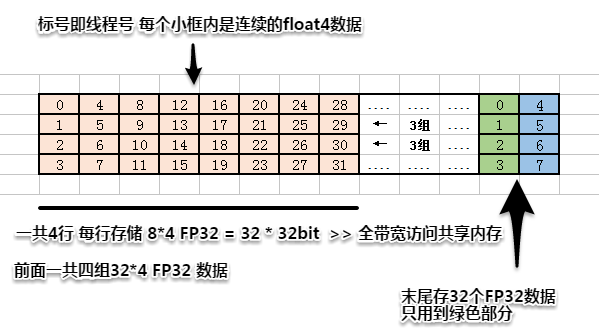
每个block负责32*16=512点Y计算
32个threads 对显存合并访问 读取X
每个thread进行4次LDG.128访问 + 一次LDG访问(32bit,末尾的32个X,只用到1/2的数据)

Shared访存
整体来看,一个线程需要访问8次共享内存(128bit形式)
eg:
第一次,所有线程访问第一行,第二次第二行,第三次第三行,第四次第四行
第五次时,需要向左移一列访问,接下来再访问三行
(注:图看不清的话,可以点击放大)

以thread 0为例 ,蓝色框是其访存范围,红色线条是访存顺序。
黑框是 thread 1 的访存范围,前后两个线程共享16个 float 数据
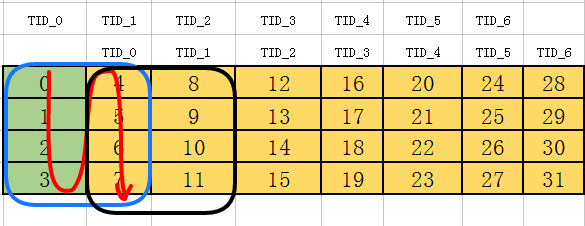
这样的LD/ST方法,利用了完整的共享内存带宽。
算法结构
计算示意(结合 1、一维卷积计算过程 理解)
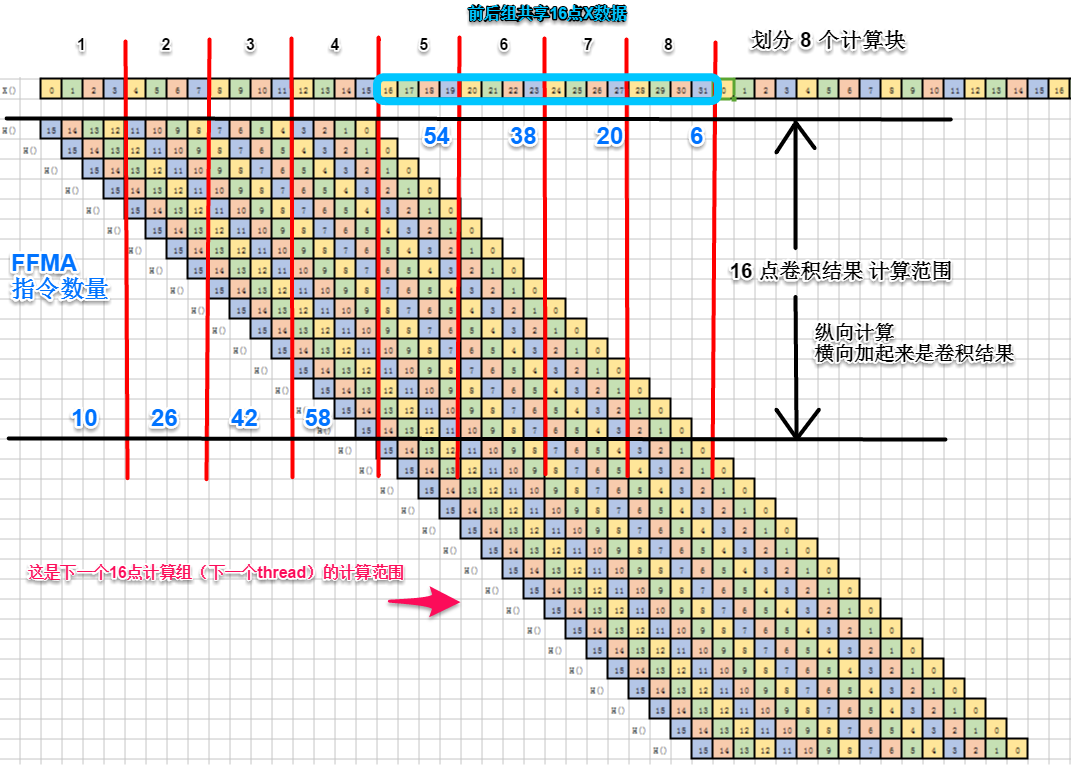
完全避免寄存器冲突的办法
SASS代码:
conv16_final_32blockOcup.sass
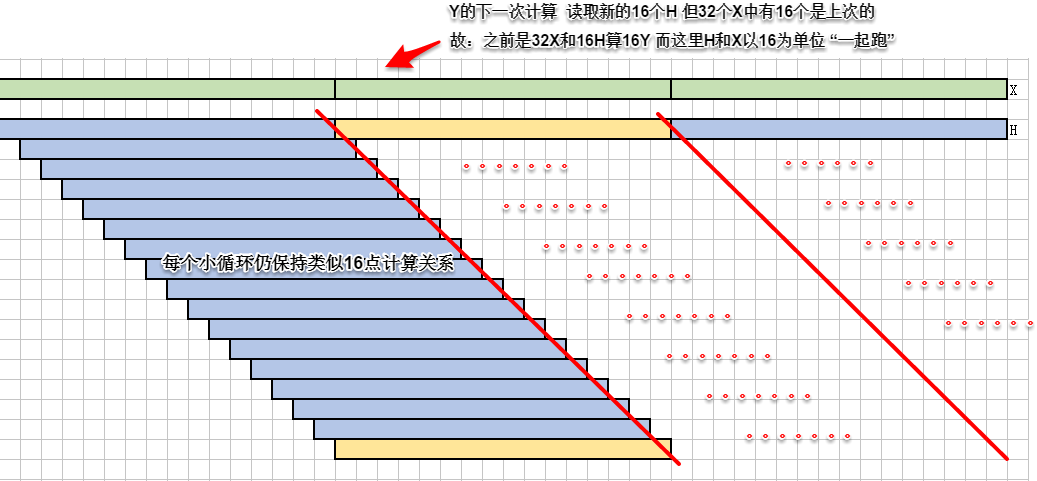
1024点卷积
计算的核心循环与16点卷积一致,32点X与16点H参与计算。
区别在于下一次循环还要使用32个当前计算X中的的后16个;下一次计算使用的H是新的16个。
理论分析:由于一个小循环算完16点Y,数据都在片上,所以再套上大循环,对X、Y做双缓冲不会有速度提升
实际处理:H加双缓冲无效,寄存器双缓冲预取共享内存中的X,计算掩盖延迟。
一维卷积核H:1024 float
输入数据量X:2097152 float
输出数据量Y:2097152+1024 float (最后1024个Y为了方便,没有进行计算)
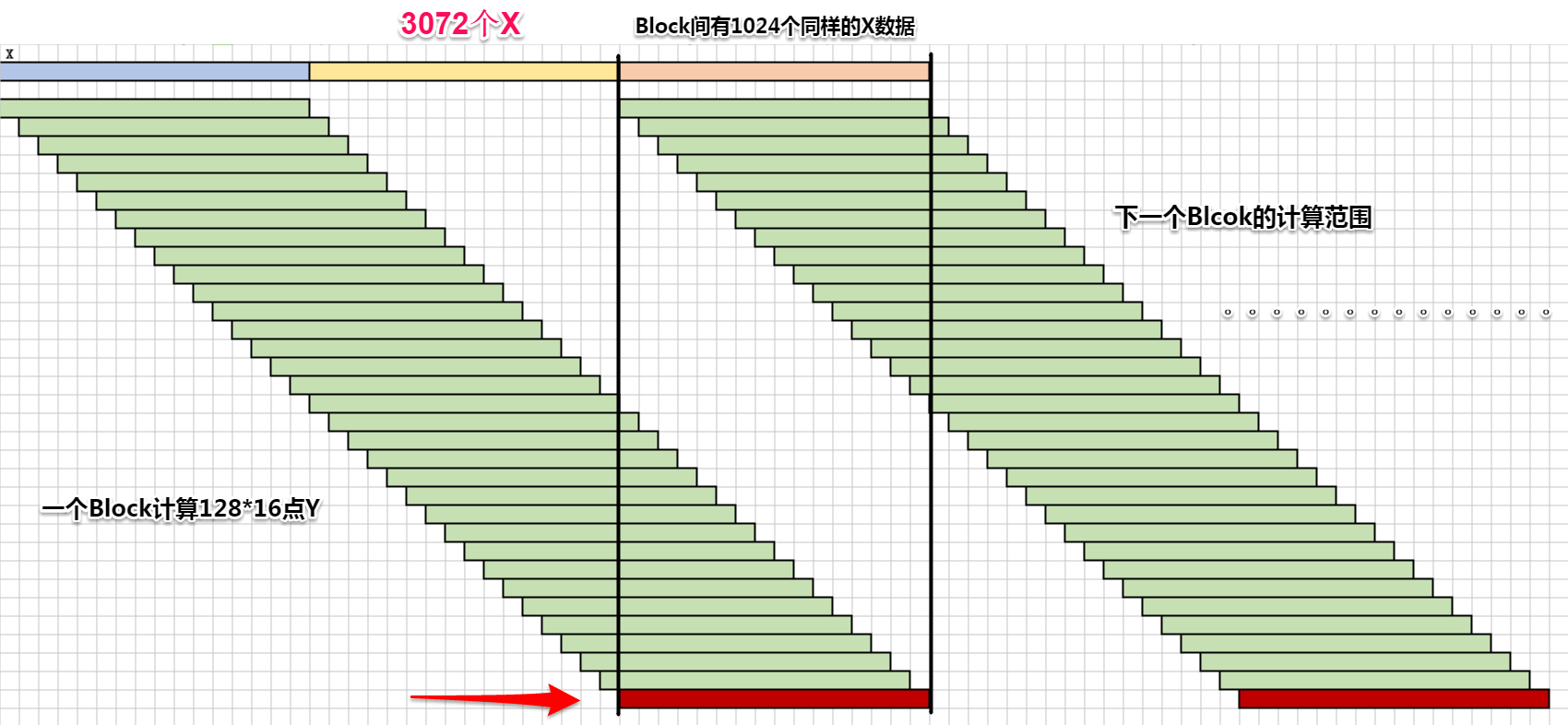
线程结构:128个thread一个blcok,每个thread计算16点Y,一共需要1024个block。
存储结构
X数据存储与16点类似,一个block存128线程*(4float*6次加载)=3072个单精度浮点。
还需要1024*4byes存放H。
共分配4096*4bytes的共享内存空间

计算结构
block内计算示意
block间计算示意
注:Y存回片外时通过共享内存reshape,有bank conflict,只用到了共享内存1/4的完整带宽。
但实测对kernel执行时间基本没有影响(占比太小)。
SASS代码:
conv1024_nobuffer.sass
3、实验结果
16点卷积
每个线程使用60个寄存器(优化后),恰好达到1个SM上32个Block的占用上限。
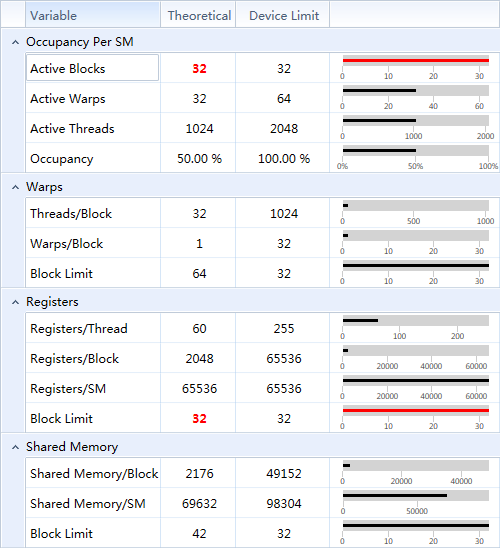
实测,只要一个SM上达到6个Block的占用,就可占满带宽。
6占用kernel执行时间和32个占用的时间一致。
占用多了,带宽跟不上,还是需要等待。
数据量(32*16*2000)*2 = 2*1024000FP32 = 2*1024000*4bytes/1024/1024 = 7.8125MB
下图可知,kernel平均计算时间为56us
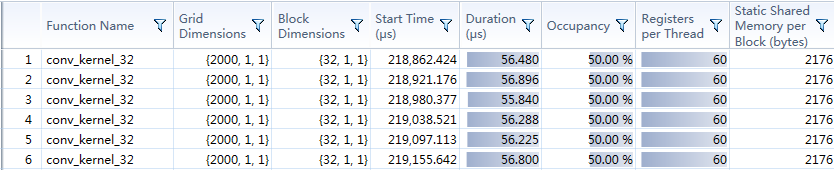
带宽占用: 7.8125MB / 0.056ms = 139.51GB/s
与理论分析一致
1024点卷积
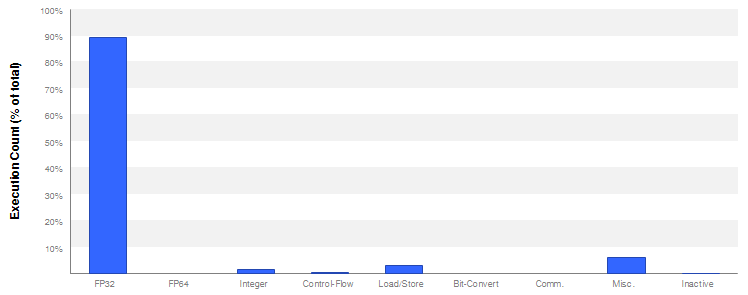
Visual Profiler (nvvp)分析:
带宽未占满
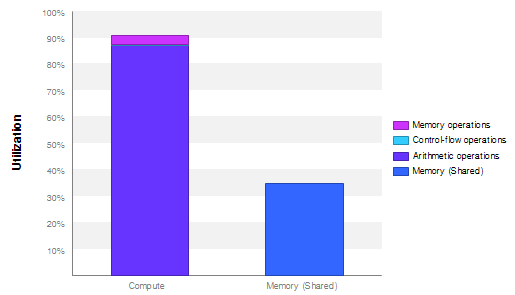
计算指令占比接近90%
SM占用6
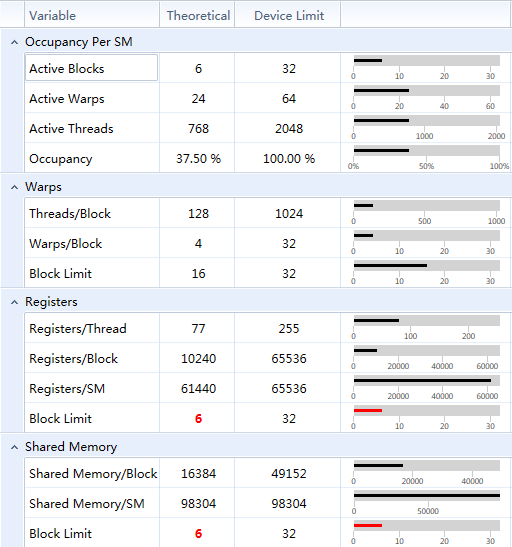
实测占用 6、4、2个block的情况,kernel执行时间一致。
由于计算能力限制,占用多了也算不过来。
kernel执行时间1.4ms

| 结果 | 达到硬件峰值计算能力的74% (未达到90%) |
|---|---|
| 数据量 | 输入X+输出Y = 2*2097152 float = 2*2097152*4bytes/1024/1024 = 16MB |
| kernel时间 | 1.4ms |
| 带宽占用 | 16MB / 1.4ms = 11.42GB/s |
| kernel算力 | 2097152_X输入*1024_H卷核*2_乘加 / 1.4ms = 4.295 GigaFloatOp / 0.0014s = 3067.86 GFLOPS |
| 硬件算力 | 1.25GHz * 1664cores * 2 = 4160 GFLOPS |
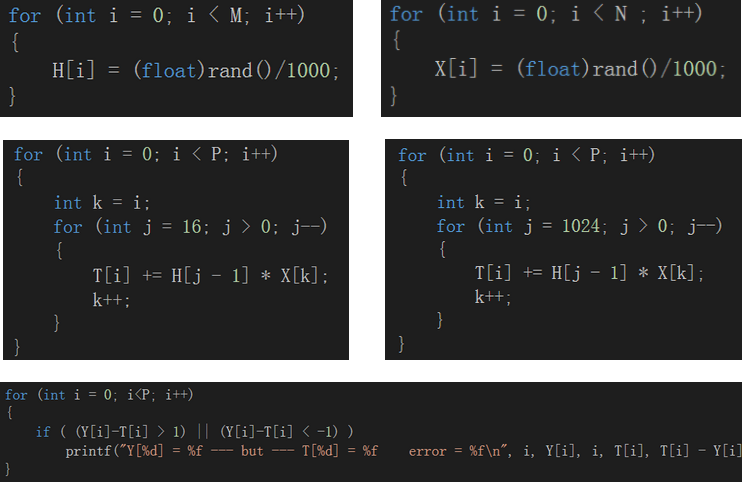
数据生成及结果验证
原始数据X、卷积核H和结果Y的长度分别为N、M、P。
卷积核与原始数据用伪随机数填充。
CPU计算的卷积结果放在数据块T中。
GPU计算的卷积结果拷贝到数据块Y中。
打印前1024个T与Y的误差
Y与T差的绝对值大于1则打印出来(计算精度所在位置随数据大小变化)
4、小结
常用的优化方法:
调整算法结构(匹配硬件特性),kernel间整合(减少访存),kernel优化(数值计算过程与汇编)
16点卷积和1024点卷积恰好可划分在访存密集和计算密集这两个类型中。
是比较好的练手项目。
访存密集型的算法不需要用汇编优化,保证基本的合并访存即可。
但一些算法结构复杂,需要仔细分析,利用好片上和片外内存的带宽。
1024点卷积kernel应该达到90%+的峰值算力,未找到受限原因。
理论上1024点卷积不需要嵌套循环,不用对X做双缓冲预取,因为当前计算的Y与下一大组X没有数据依赖关系。
按现在的理解,在SM上block占用低于一个阈值的情况下,双缓冲可以带来一定的计算能力提升。
在占用足够的情况下,线程级并行、线程间的切换,其实和双缓冲是等效的。
(2017补充)
实际工程中常用FFT在频域进行快速卷积。
5、后续
二维卷积
FFT
