@xlsd1996
2020-08-09T02:29:39.000000Z
字数 1472
阅读 753
Stochastic Origin-Destination Matrix Forecasting Using Dual-Stage Graph Convolutional, Recurrent Neural Networks阅读笔记
论文笔记 2020 ICDE GNN Traffic
Journal(Venue) and Author
期刊会议及作者
2020 ICDE
Jilin Hu, Bin Yang, Chenjuan Guo
Summary
用自己语言对文章的概述,便于以后查阅。
本文利用三维OD矩阵来建模OD预测的问题(本文中第三维是速度分布),提出了一种使用矩阵分解以及RNN的框架来进行学习预测,并提出了加入GCN的改进版本。难点在于如何将GCN加入矩阵分解以及RNN的过程中,本文用的是切比雪夫图卷积;分解过程是用多个卷积过滤器处理拆解变形后的OD矩阵,然后经过pooling,得到子矩阵和;预测过程是将卷积过滤器加入每个cell;
Research Objective
作者的研究目标?
1.OD矩阵在运输和物流中被广泛使用,用于记录一天内不同时间间隔内OD区域对之间的旅行成本
2.需要处理从稀疏的、历史上的OD矩阵预测完整的、近期的OD矩阵。
Problem Statement
需要解决的问题是什么?
给定一个OD矩阵序列,预测后续的OD序列: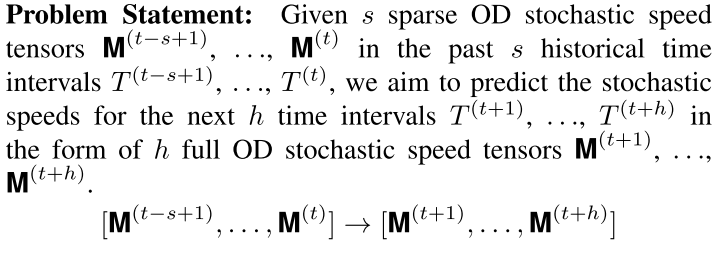
本文中OD矩阵为 区域x-区域y-速度分布的三维矩阵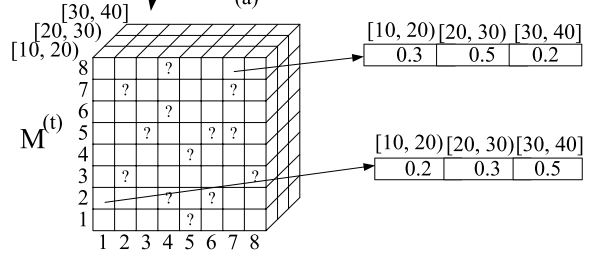 ;
;
Method(s)
作者解决问题的方法/算法是什么?是否基于前人的方法?
- 将每个历史OD矩阵分解为两个稠密矩阵R和C,R与C的序列过RNN预测新的两个序列,重构得到新的OD序列,主要思路如下图:
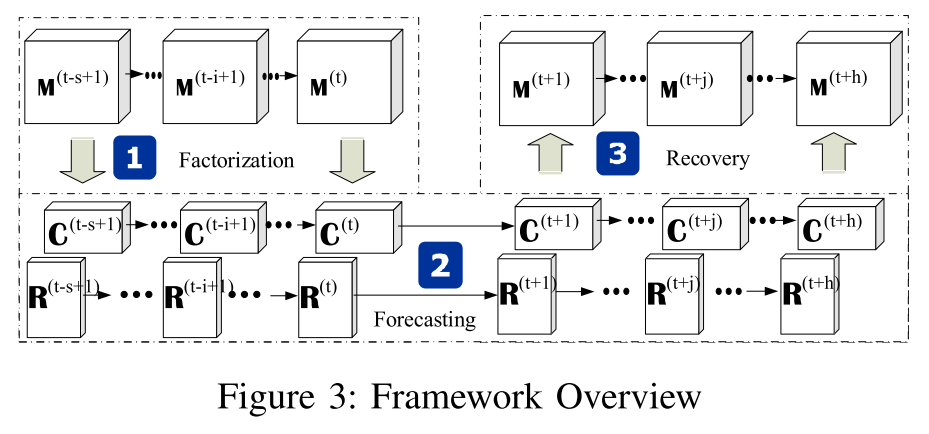
- 使用矩阵分解和图卷积神经网络在捕获空间相关性时对抗数据稀疏,以及通过扩展了图卷积的递归神经网络捕获时空动态
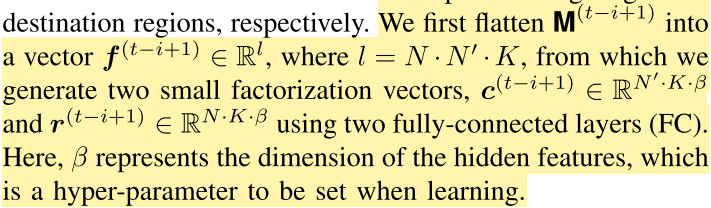
- 作者首先使用了普通矩阵分解,就是简单的过两个全连接得到两个稠密矩阵R和C:
- 然后提出了改进,利用了空间信息,叫做空间矩阵分解,用了GCN:
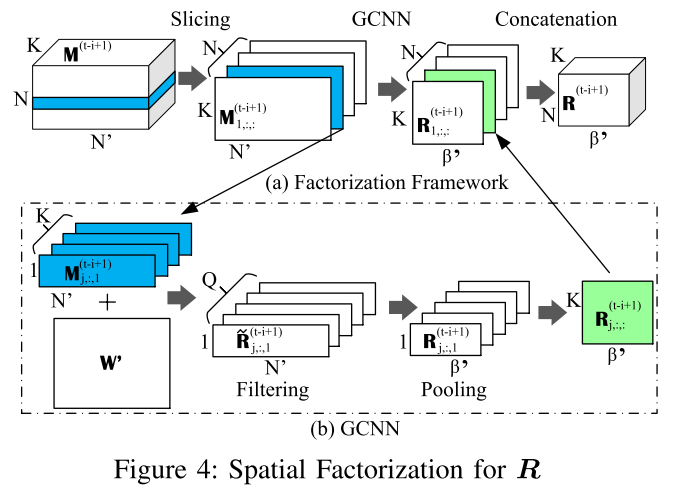
具体来说,先用邻接矩阵A得到距离矩阵W,利用W和GCN得到 作为第k个桶的特征,然后经过 图卷积filter和pooling得到稠密
5.第二个改进是在RNN中加入了图卷积过滤器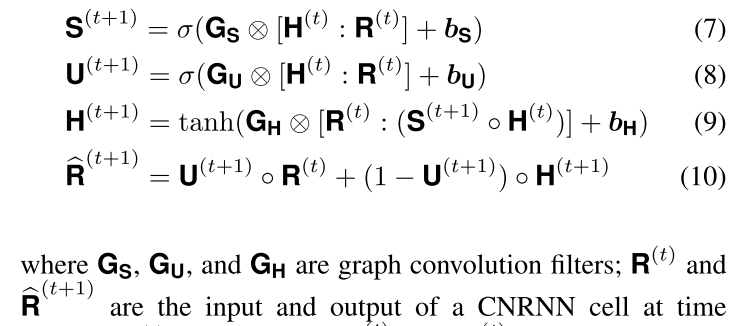
Evaluation
作者如何评估自己的方法,实验的setup是什么样的,有没有问题或者可以借鉴的地方
提出的方法
1. base framework (BF) 简单版本
2. advanced framework (AF) 使用GCN的版本
对比方法:
3. recurrent neural networks using GRU gates (RNN)[30]
4. Multi-task Representation Learning (MR)2
5. Naive Histograms (NH)
6. Gaussian Process Regression (GP)[39]
7. Multi-variate vector autoregression (VAR)[40]
Metric: KL,JS,EMD 都是用来评估分布差异性的指标
数据集 NYC,CD
Conclusion
作者给了哪些结论,哪些是strong conclusions, 哪些又是weak的conclusions?
Question
阅读过程遇到的问题
- 能不能把KL散度那篇文章和这篇结合
- 还有别的文章是这样用3维矩阵来表示OD的吗
- 三维矩阵分解和二维的有什么区别或困难吗,常见的矩阵分解有什么做法
- 起点终点用不同的邻接矩阵?说是会在不同城市,有点怪(V-A)
Reference(optional)
列出相关性高的文献,以便之后可以继续track下去
