@c-xy
2016-10-23T16:25:04.000000Z
字数 2028
阅读 446
第六次作业
摘要
本文讨论了考虑空气阻力以及空气阻力随海拔变化的情况下(恒温模型),进行定点射击的参数设置。一门加农炮发射时的全部参数只有初始速度(包括速度的方向,对于二维情况就是速度的横纵坐标),而目标可以用海拔跟距离两个值表示。本文解决了以下问题:只要给定目标位置,即可给出全部能击中目标的速度的组合(用一条二维曲线表示出)。
代码
def accelerate(x,y,vx,vy):v=sqrt(vx*vx+vy*vy)ansax=-0.00004*v*vxansay=-g-0.00004*v*vyreturn (ansax,ansay)import pylabfrom math import sqrtfrom math import cosfrom math import sinfrom math import pifrom math import atang=9.8class Euler2Dsimulation:def __init__(self,speed,theta,aimx,aimy,acc=accelerate,timestep=0.001):self._timestep=timestepself._x=[0]self._y=[0]self._vx=[speed*cos(theta)]self._vy=[speed*sin(theta)]self._aimx=aimxself._aimy=aimyself._accelerate=accdef calculate(self):#速度过小返回falsewhile True:self._x.append(self._x[-1]+self._vx[-1]*self._timestep)self._y.append(self._y[-1]+self._vy[-1]*self._timestep)(ax,ay)=self._accelerate(self._x[-1],self._y[-1],self._vx[-1],self._vy[-1])self._vx.append(self._vx[-1]+self._timestep*ax)self._vy.append(self._vy[-1]+self._timestep*ay)if self._x[-1]>=self._aimx:return self._y[-1]-self._aimyif self._vy[-1]<=0 and self._y[-1]<=self._aimy:return -1000def plot(self):pylab.plot(self._x, self._y)pylab.xlabel('x ($m$)')pylab.ylabel('y ($m$)')def dichotomy(para1,para2,func,eps=1):temp=(para1+para2)/2ft=func(temp)while abs(ft)>eps:f1=func(para1)f2=func(para2)if f1*ft>0 :para1=tempelse:para2=temptemp=(para1+para2)/2ft=func(temp)return tempmax_speed=5000target=(15000,2000)min_theta=atan(target[1]/target[0])ltheta=[]lspeed=[]theta=min_thetawhile theta<pi/2:theta+=0.01if Euler2Dsimulation(max_speed,theta,target[0],target[1]).calculate()<0 :continueltheta.append(theta)def func(para):return Euler2Dsimulation(para,theta,target[0],target[1]).calculate()lspeed.append(dichotomy(10,max_speed,func))lx=[]ly=[]for i in range(len(ltheta)):lx.append(lspeed[i]*cos(ltheta[i]))ly.append(lspeed[i]*sin(ltheta[i]))pylab.plot(lx,ly)pylab.show()
结果展示
在这里,我们假定目标的坐标为(15000,2000),然后给出了所有可能打到这个位置的初始发射速度。图像曲线上的每一个点都代表了一种发射速度,从而可以轻易看出我们想要的信息,比如最小发射速度等。
(这里不得不吐槽python的运行速度,我跑了三十分钟都没出结果。真!的!慢!所以不得已我将精度调的非常低,让运行时间可以接受)
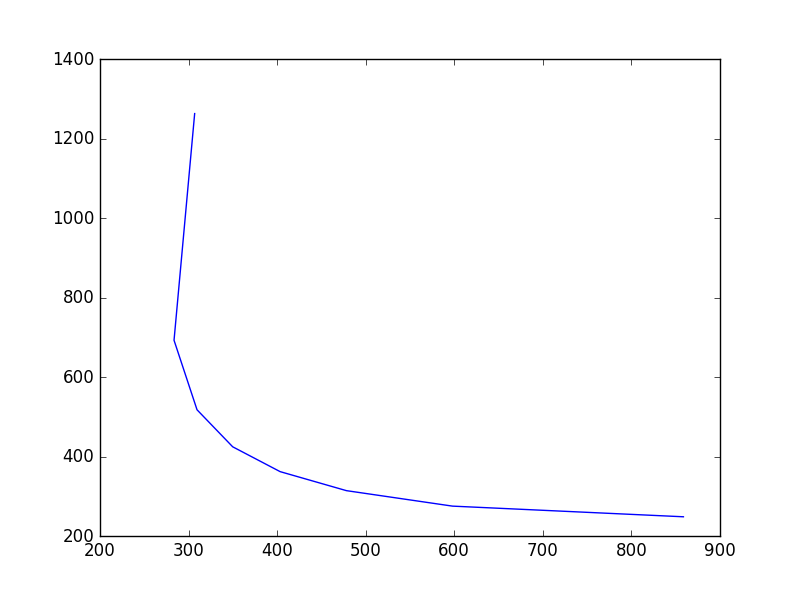
(这幅图上点的横纵坐标代表发射速度的横纵分量,按这些速度发射即可射中目标。理应是光滑曲线,但限于精度只取了几个离散点)
