@74849b
2016-10-30T06:58:36.000000Z
字数 5951
阅读 707
exercise 07
problem 3.13
背景
One example of a simple pendulum is a particle of mass connected by a massless string to a rigid support. is the angle that the string makes with the verticle.Given the force that the particle beard,the force perpendicular to the string is given by
The previous equation describes a frictionless pendulum,we should add some damping.In many cases,this damping force is proportional to the velocity.The equation of motion for our damped pendulum has the form
Besides the friction,we therefore consider the addition of a driving force to the problem.A convenient choice is to assume that the driving force is sinusoidal with time,with amplitude and angular frequency .This leads to the equation of motion
However,we should have a mumerical method that is suitable for various versions of the pendulum problem.We don't assume the small-angle approximation.Putting all of these ingredients together,we obtain the following equation:
Problem 3.13 need consider the stabilityof the solutions to our problems.We have two identical pendulums with exactly the same lengths and damping factors.The only difference is that we start them with slightly differentinitial angles.Observe the behaviour of the angular positions of two pendulums, and ,and the divergence .For different values of ,the trend of the plots vary.This line corresponds to the relation ,which implies
正文
Code as follows:
import matplotlib.pyplot as pltimport mathclass pendulum_1:def __init__(self,time_step=0,theta1=0,theta2=0,time_of_duration=0,fd=0.5,q=0.5):self.theta1=[theta1]self.theta2=[theta2]self.dt=time_stepself.fd=fdself.q=qself.t=[0]self.w1=[0]self.w2=[0]self.nsteps=int(time_of_duration//time_step+1)def calculate(self):self.v=[]wd=float(2.0/3)for i in range(self.nsteps):self.w1.append(self.w1[i]+(-math.sin(self.theta1[i])-self.q*self.w1[i]+self.fd*math.sin(wd*self.t[i]))*self.dt)self.theta1.append(self.theta1[i]+self.w1[i+1]*self.dt)self.w2.append(self.w2[i]+(-math.sin(self.theta2[i])-self.q*self.w2[i]+self.fd*math.sin(wd*self.t[i]))*self.dt)self.theta2.append(self.theta2[i]+self.w2[i+1]*self.dt)self.t.append(self.t[i]+self.dt)self.v=list(map(lambda x:abs(x[0]-x[1]),zip(self.theta1,self.theta2)))if self.theta1[i+1]<-math.pi:self.theta1[i+1]=self.theta1[i+1]+2*math.piif self.theta1[i+1]>math.pi:self.theta1[i+1]=self.theta1[i+1]-2*math.piif self.theta2[i+1]<-math.pi:self.theta2[i+1]=self.theta2[i+1]+2*math.piif self.theta2[i+1]>math.pi:self.theta2[i+1]=self.theta2[i+1]-2*math.pireturn 0def show_calculate(self,color):plt.plot(self.t,self.v,color,label="fd=%r"%(self.fd))plt.title('difference of theta versus time fd=0.5')plt.xlabel('time/s')plt.ylabel('difference of theta/radians')plt.ylim(0,0.001)a=pendulum_1(0.04,0.200,0.199,60,0,0.5)a.calculate()a.show_results('red')plt.legend()plt.show()a=pendulum_1(0.04,0.200,0.199,60,0.5,0.5)a.calculate()a.show_results('red')plt.legend()plt.show()a=pendulum_1(0.04,0.200,0.199,60,1.2,0.5)a.calculate()a.show_results('red')plt.legend()plt.show()
First,draw three plots that behaviours of vary as a function of time for our driven for several different values of the driving force:
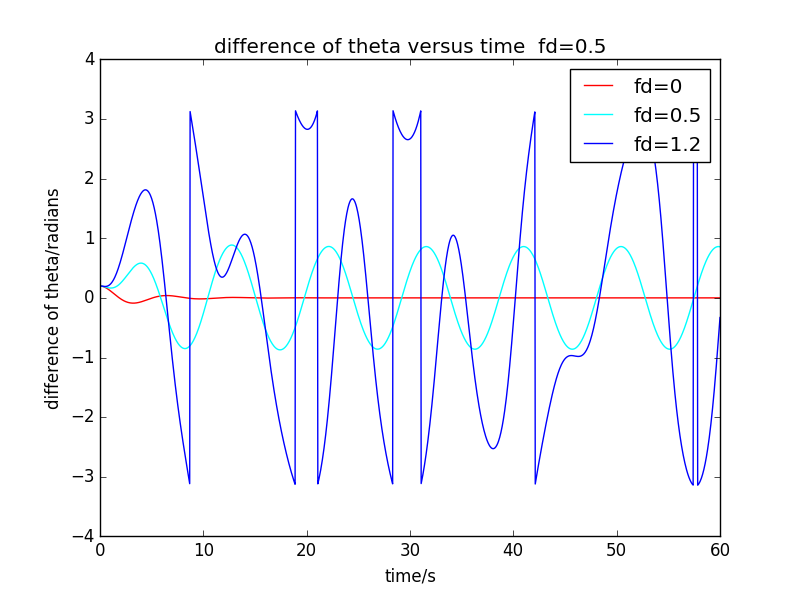
At low drrive,the motion is a simple oscillation.On the other hand,at high drive the motion is chaotic.The behaviour can be both deterministic and unpredictable at the same time.
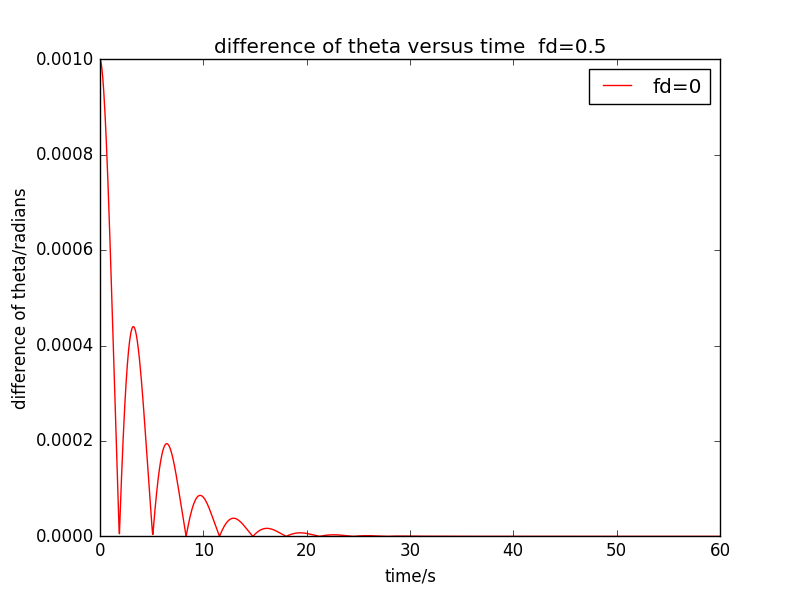
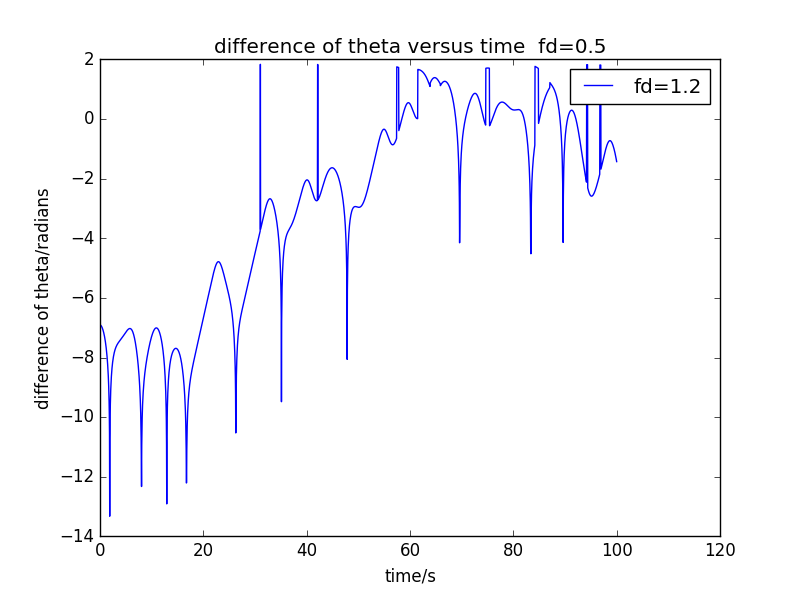
Next,we consider the behaviour of two,nearly identicle pendulums.The results are as followings:
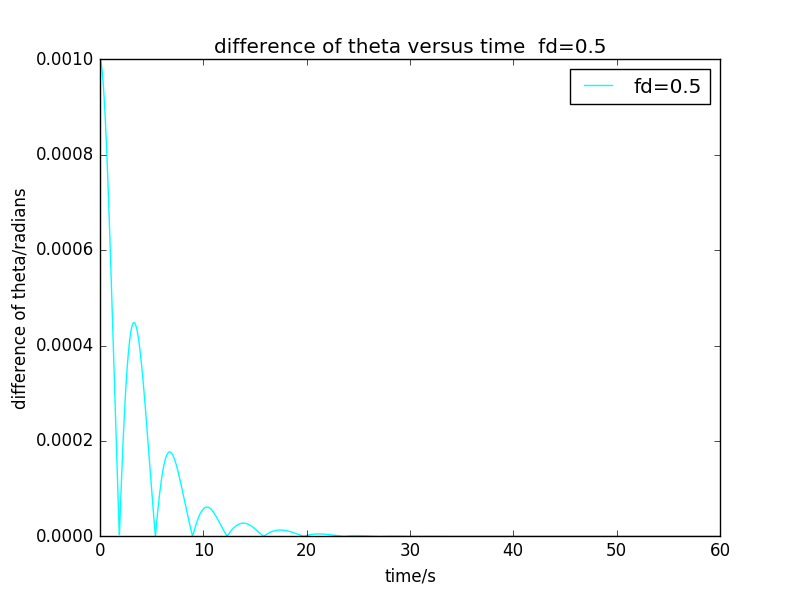

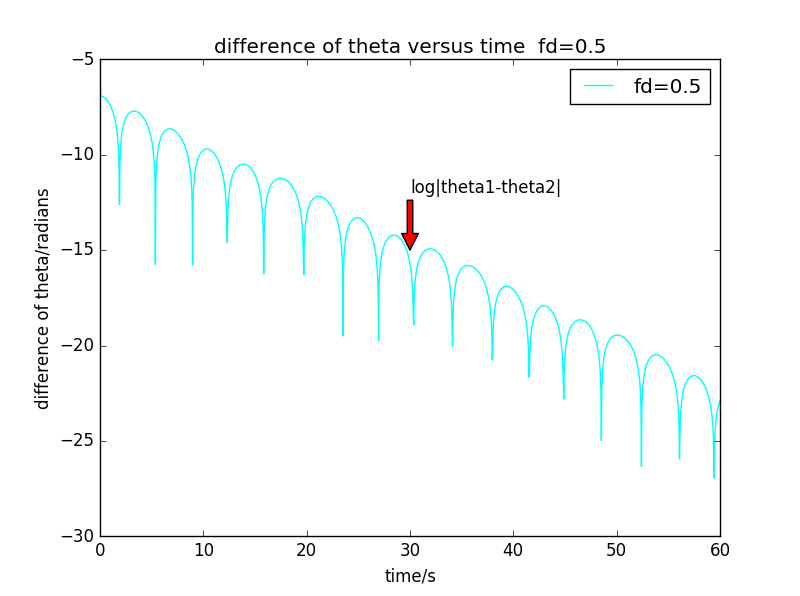
But the y axis'saccuracy isn't enough,the plot can't describe the quality of Lyapunov exponent.I modify the code,and calculate as a function of ,so we can obtain the following explicit results:
The first figure is plotted in ,we can easy to conclude is proportional to ,and ,which represents nonchaotic regimes.This means that the motion of the two pendulums becomes more and more similar,since the difference in the two angles approaches zero as the motion proceeds.
The second figure represents chaotic regimes with and .This is usually described by saying that the two trajectories, and ,diverge from one another.This system can obey certain deterministic laws of physics,but still exhibit behaviour that is unpredictable due to an extreme sensititvty to initial conditions.This's the nature of chaotic.
For ,we calculate the .Pick up two points from the turning point,such as:(0,-6.78) and (53.7,-20.35),we can obtain the slope:
We can gain the finally equation:
The second plot is difficulty to find two points,I don't calculate .
致谢
Thanks for the following code(from baidu):
v=list(map(lambda x:x[0]-x[1],zip(v2-v1))
