@lancelot-vim
2016-06-12T08:35:25.000000Z
字数 4200
阅读 2686
google DQN 源码解读(1)
源码解读
首先train_agent.lua文件进入,执行第一行代码:
if not dqn then
require "initenv"
end
由于没有dqn这个变量,之后会跳转initenv.lua文件,对环境进行配置
进入这个文件之后,瞬间可以得到一个table: dqn = {}
之后require一些文件,其中torch,nn,nngraph是torch自带文件,分别是
1. torch的数据结构以及一些常用函数
2. 网络模块
3. 网络显示模块
然后你可以看到代码: require 'nnutils'
此后,自然进入nnutils.lua文件
文件源码如下:
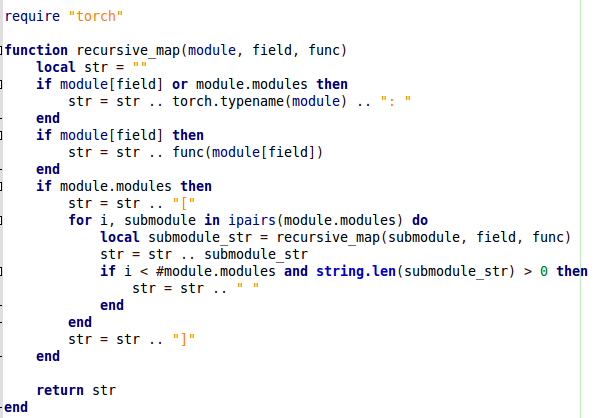


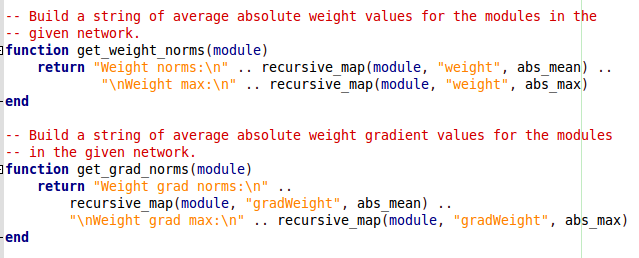
主要是这5个函数:递归映射, 绝对值平均, 最大的绝对值, 得到weight的归一化值,以及得到梯度的归一化值
解读这个文件的代码,应该从最后两个函数开始,注意这两个函数是一样的,所以就以get_weight_norms(module)作为范例
首先看注释: 在给定的网络中,构建一个平均绝对权重值的字符串给所要使用的模块
也就是说这个函数是用来得到一个字符串的,这个字符串表达的内容是平均权重值,那么,他是如何实现的呢,注意到代码都是调用了函数recursive_map,并且将一个函数对象作为参数传入了该函数,因此我们要回到recursive_map来理解这里是如何实现的
第一行代码是定义了一个空字符串
之后判断传入的模块里面有没有field或者moudle.moudules这两个对象,注意对于get_weight_norms这个函数调用来说,就是判断有没有moudle['weight']或者module.modules,如果已经有了,那么这好办,就直接把模块名连接在str后面。
之后又是一个判断,有没有moudle['weight'],如果有,那么就调用func函数,对于第一次调用recursive_map(module, "weight", abs_mean),实际上就是调用了函数abs_mean(w),这个函数直接返回了weight的绝对值的平均值(注意返回了浮点型,但是对于字符串连接操作也可以直接使用)
然后接下来这个判断是判断是不是有模块,如果有,首先是在字符串后面连接一个"[",当然最后必然会连接一个"]",中间部分是一个递归,怎么做的呢?
首先遍历模块中的子模块,然后自己调用自己
local submodule_str = recursive_map(submodule, field, func)
注意,这里是递归,可以返回一个表达这个子模块的字符串,连接在str后面,注意一个细节是,每个子字符串用空格隔开,也就是这段代码:
if i < #module.modules and string.len(submodule_str) > 0 then
str = str .. " "
最后的效果就是,这个模块里面所有的数据,以及子模块里面的数据,都以func这个函数的约定展开成了字符串
然后你就愉快地跳出了这个文件,回到了initenv.lua文件,执行下一行,image是torch自带文件,这个文件定义了对图像操作的一些函数,执行之后进入了'Scale.lua'文件,这个文件里面的代码相对简单,分析如下:
这个文件先注册一个类nn.Scale,这个类继承于nn.Module类
我希望你能明白torch.class的用法,从torch官方文档上截图了他们给出的demo

特别地
x = image.rgb2y(x)
x = image.scale(x, self.width, self.height, 'bilinear')
第一行表示把图像从rgb三通道转换到y亮度通道(可以认为是灰度化),下面这行是对图像进行双线性插值,把尺寸变换到self.width以及self.height的大小
NeuralQLearner.lua
回到initenv.lua文件,下一行是require 'NeuralQLearner',自然是核心代码定义dqn网路
由于之前已经运行了intienv.lua,有个全局的表dqn,所以进入这个文件后,不执行判断里面的代码,直接执行local nql = torch.class('dqn.NeuralQLearner')
也就是注册了一个类别:dqn.NeuralQLearner,而这个类别的本地代理名叫做nql
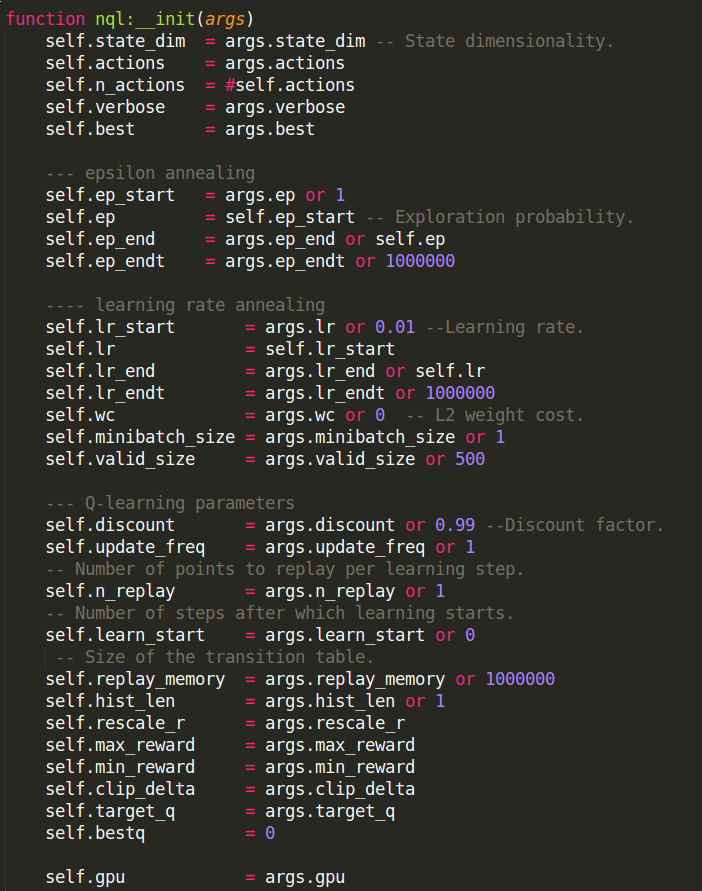
接下来自然是初始化函数:function nql:__init(args)
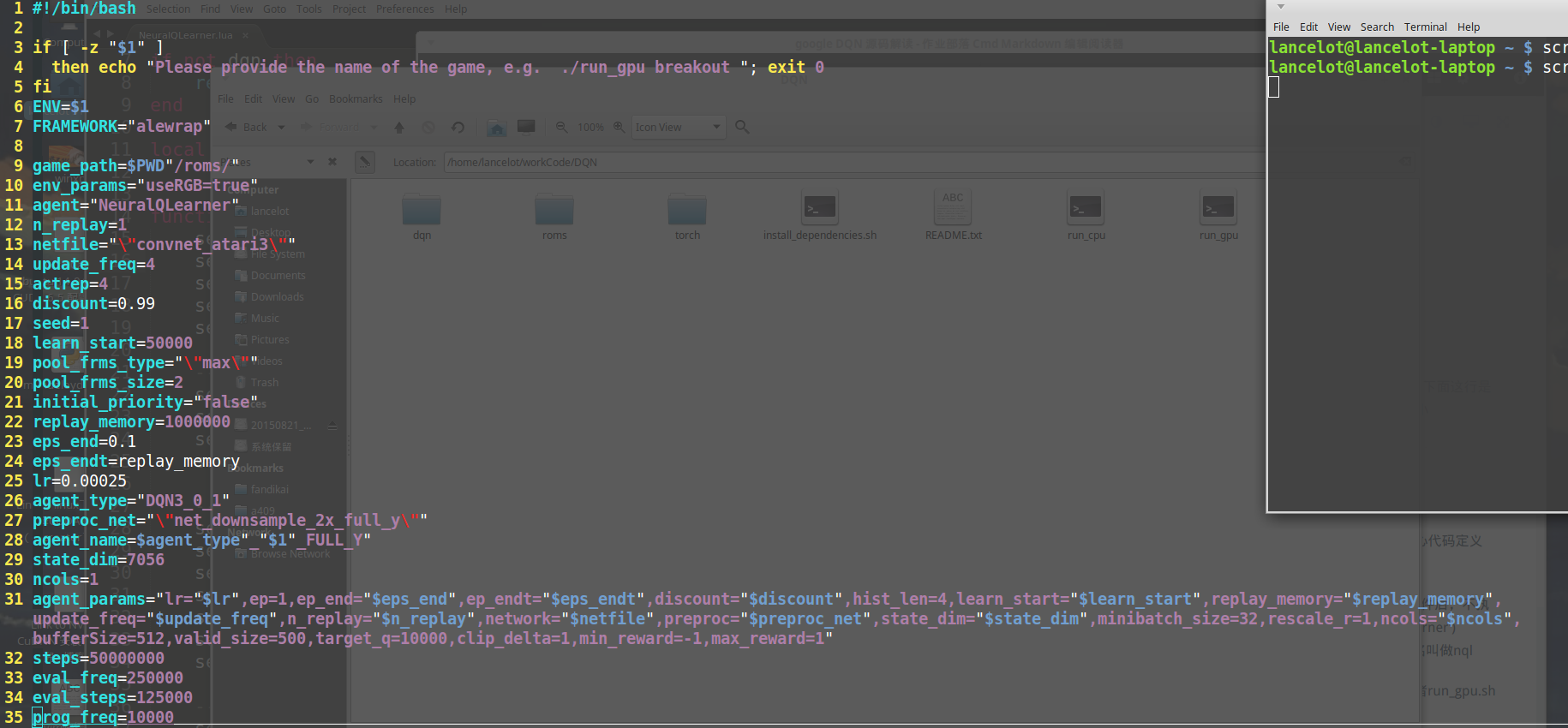
对于初始化函数,我想如果你要理解它,应该先去研究run_cpu.sh或者run_gpu.sh
以下就是它的run_gpu.sh
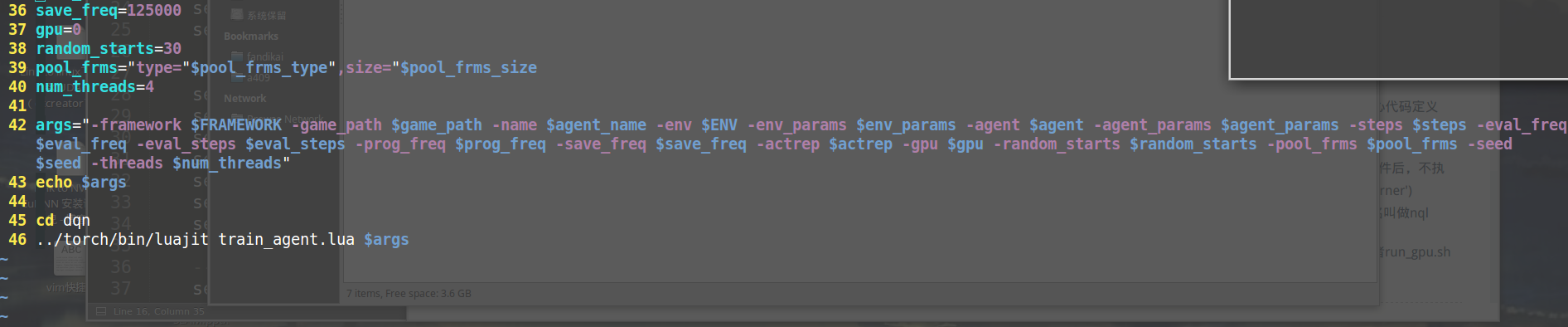
下面是train_agent.lua里面配置命令行的代码
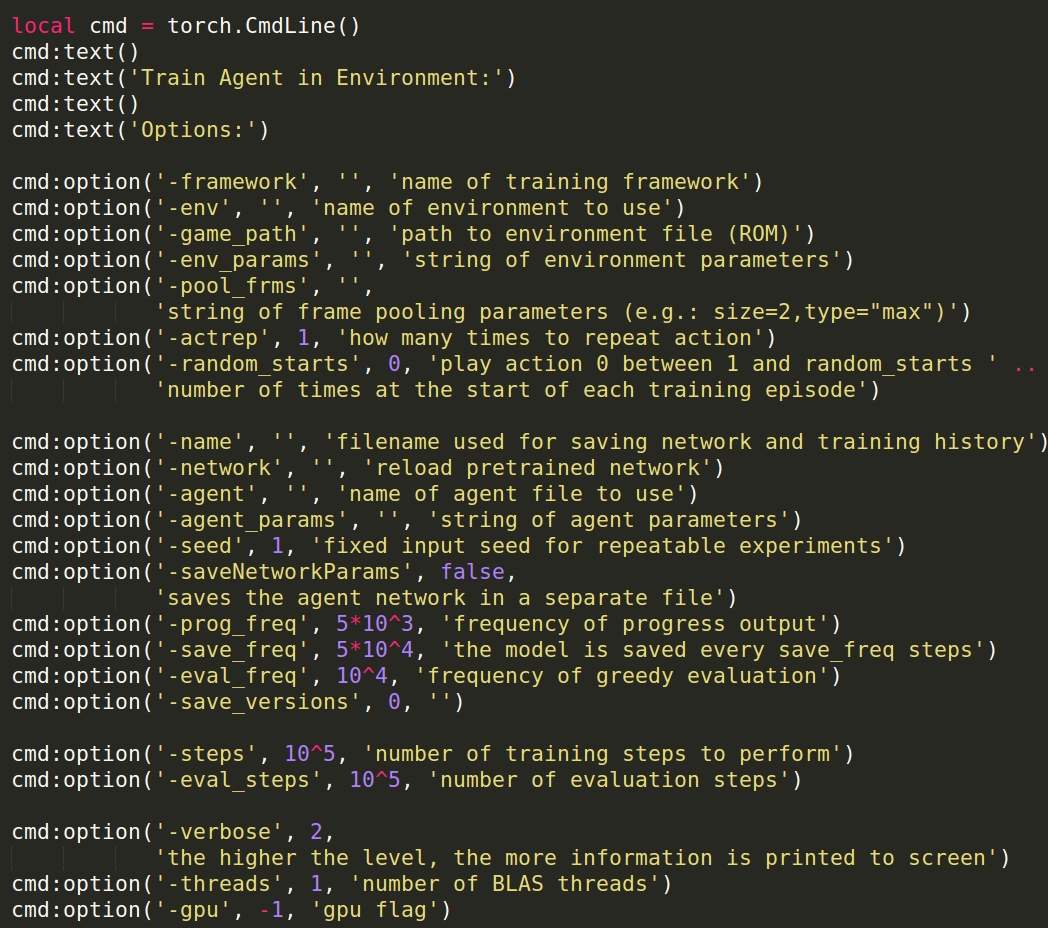
cmd:text()是输出一行,如果带有字符串参数,就会输出字符串
cmd:option('-env', '', 'name of environment to use')的意思是配置列表中key值为env的值,第二个参数就是你要配置的值,默认为空字符,第三个参数是提示文本,这个会在你配置参数的时候告诉你这个配置参数的含义
这里一共有22个参数分别代表一下意思:
1. framework 训练框架名:给你训练的这个东西取一个名字,在shell里面取名为alewrap
2. env 环境: 游戏名字
3. game_path 游戏路径
4. env_params 环境参数:是否是RGB等
5. pool_frms 帧池: 这个参数下需要配置两个参数:尺寸,类型(你可以看到deepmind在shell里面在前面设置了size和type,后面吧这两个参数统一了,分别是19,20和39行
6. actrep 重复动作次数,这个参数在第15行配置为了4
7. random_starts 随机初始位置,这个参数用来设置一个值,使得随机数出现在0到这个值之间,作为每次训练的开始位置
8. name 给你的训练网络和训练的历史参数保存文件取个名
9. network 预训练网络名
10. agent 机器人的名字
11. agent_params 机器人参数,这个参数需要设置一大堆,分别有(这里就枚举一下比较难理解的参数)
lr:学习率 ep:贪心策略退火算法起点 ep_end:贪心退火策略终点,
其他参数请自行研究
回到函数nql:__init(args),前面部分都是在对参数进行配置
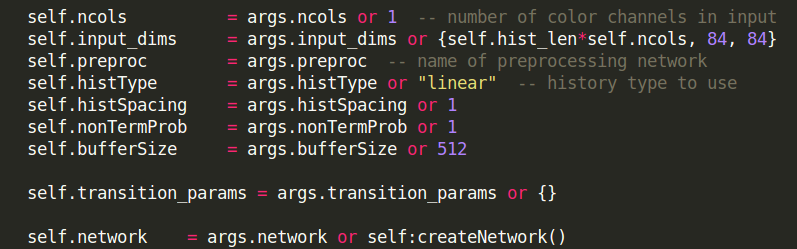
之后是检测网络是否是一个网络文件,实际上网络文件在先前的shell里面已经配置了,文件名叫做convnet_atari3.lua,后面用pcall(require, self.network)将文件加载进来,我简单介绍一下pcall这个函数的使用
pcall需要传入一个函数对象作为第一个参数,后续参数为传入函数的所需的参数
比如require()这个函数,需要传入一个文件名(string类型),所有以pcall第一个参数是require,第二个参数是self.network
pcall 有两个返回值,第一个返回值是返回传入函数是否调用成功,为一个boolen类型的对象
第二个参数,调用成功返回传入函数调用后的返回值,失败返回错误原因
如果还不清楚,请自行谷歌或者翻看lua文档
所以这里为了确保后续工作不会因为调用require调用失败无法进行返回一个未知的错误,使用了pcall进行函数调用
convnet.lua
既然进入了网络定义的文件,在这里就阐述一下网络具体是如何定义的
首先通过pcall调用require('convnet_atari3.lua'),进入convnet_atari3.lua文件,这个文件又调用convnet.lua文件
特别的,在convnet_atari3.lua文件中,定义了网络参数,然后调用了convnet.lua中的create_network(args)函数
值得注意的是,这个文件本身是一个return function,也就是说,这个文件的返回值是一个函数,这个函数是
function(args)
args.n_units = {32, 64, 64}
args.filter_size = {8, 4, 3}
args.filter_stride = {4, 2, 1}
args.n_hid = {512}
args.nl = nn.Rectifier
return create_network(args)
end
在convnet.lua文件中,只有一个函数,这个函数是用来定义网络的
第一行是定义网络为串行网络,然后用nn.Reshape()修正输入维度,输入维度为用户传入的维度,是一个Table,用unpack解开,得到Table里面的值
只有定义函数对象convLayer = nn.SpatialConvolution,如果有用显卡会定义为nn.SpatialConvolutionCUDA,并且会在Reshape层后面加一层维度转换层:nn.Transpose({1,2},{2,3},{3,4})
这样就把第一维度换到了最后,其他顺序不变
之后自然是加入卷积层
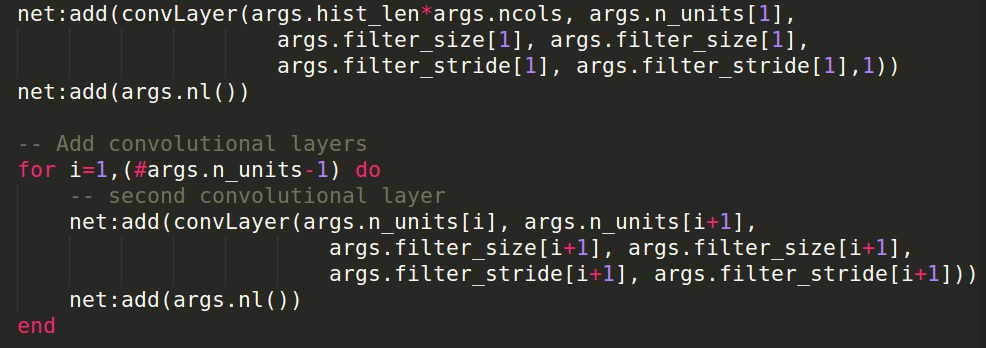
值得注意的是,对于卷积层的输出部分对于是否使用显卡有不同的配置
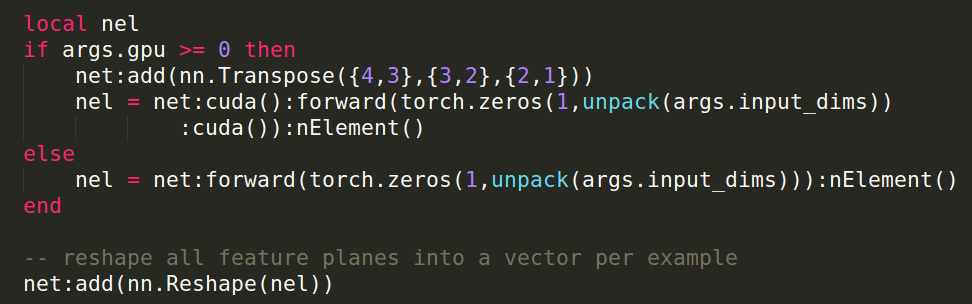
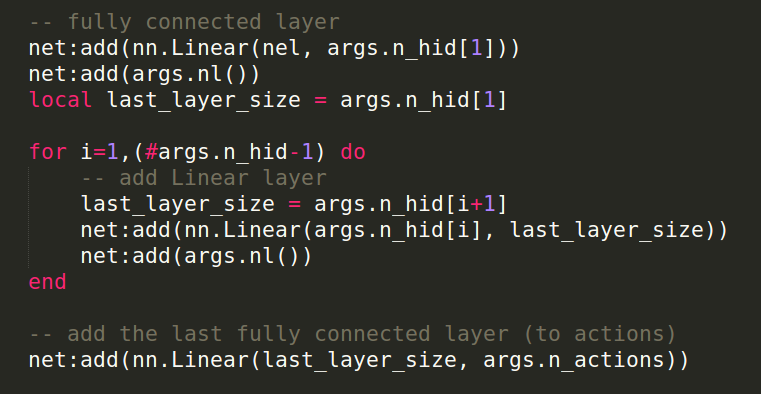
后面是全连接层
最终,NeuralQLearner.lua文件中,通过调用 msg, err = pcall(require, self.network),得到了一个神经网络保存到了err中
实际上可以注意到,如果是其他情况(导致pcall返回失败信息),那么判断是否可以使用torch.load()加载网络,如果还是错误,才抛出错误
如果加载成功,那么判断self.best和exp.best_model会不会有一个为空,如果都不是空,那么将exp.best_model作为最终网络,如果有一个是空,那么吧exp.model作为最终网络
当然,如果第一步也就是pcall(require, self.network)已经执行成功,那么直接得到一个神经网络

值得注意的是,之前在convnet_atari3.lua文件的这个返回函数,需要传入一个参数,而截图中的调用方式self::network(),实际上是把self作为参数传了进去
之后用同样的方法,加载预处理网路,这个文件很简单,加载了Scale.lua,然后自身就几行
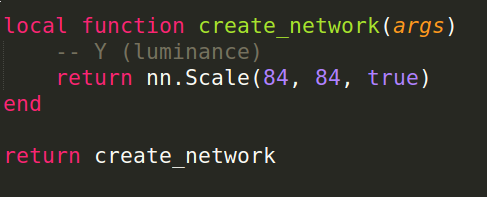
最后直接返回一个函数,效果是把图片灰度化,然后拉伸成84 × 84的图
执行到这里之后,执行到了dqn.TransitionTable这个类,因此我们需要转到文件TransitionTable.lua中
