@lancelot-vim
2016-08-30T01:59:13.000000Z
字数 247
阅读 1578
Kalman Filter
Barfoot
卡尔曼滤波两张核心图
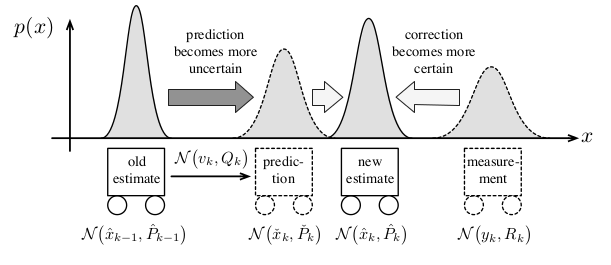
这个图代表的是已知之前的状态,对当前状态有一个预测,之后又对当前状态有一个不准确的观测,然后把这两个数据融合,得到了当前状态最好(MAP)估计
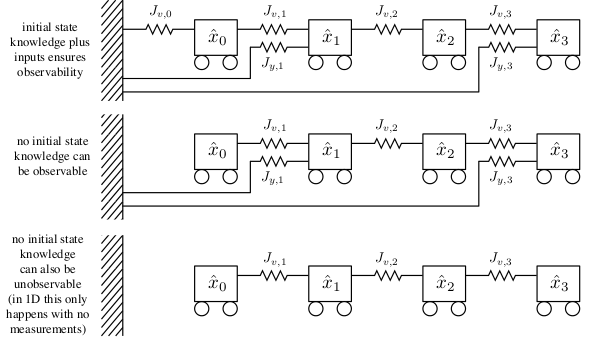
这个图代表了各个状态之间相互的影响以及观测对系统的影响
对问题的思考
那么如果观测是对之前状态的观测(也就是说观测有一个延迟),对系统会有一个怎样的表现呢?
实际上这就是第二个图第一部分和第三部分的融合
卡尔曼滤波可以作用到观测到的些部分,更新状态,然后以新的状态再做一个对当前状态的估计,得到新的状态
