@lancelot-vim
2016-06-14T19:53:04.000000Z
字数 949
阅读 1546
SO(3) and so(3)
slam
SO(3) is the Group of rotatopns in
=so(3) = = Lie algebra of SO(3)
why group?
if ,
then
and det = det = det = 1
det = det = 1
why Lie group
commutator(换位子或者交换子) of two matrices A, B is [A,B] = AB-BA
A(linear) Lie Algebra is a vector space of matrices that is closed under [,]
so(3) is a Lie algebra
proof
if A, B so(3)
then A, B are real, and
then
so [A,B] so(3)
How are SO(3), so(3) related
If A so(3), then SO(3)
proof
so -iA is Hermitian
so is unitary (the eigen value of Hermitian is real number, or according to spectral decomposition theorems, it is obviously that is unitary)
is real because A is real
if A = 0 then tr(A) = 0
then
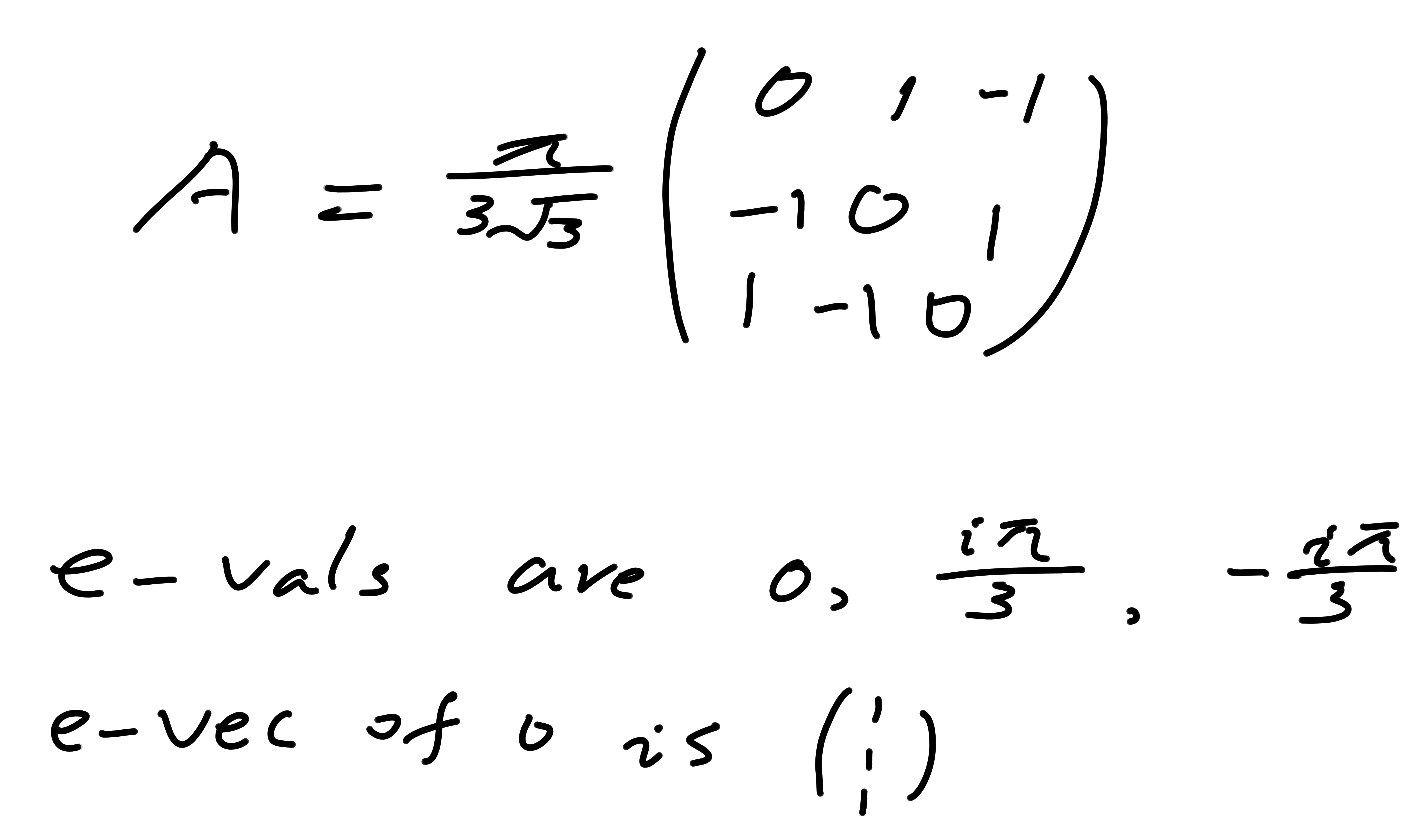
eigenvalues
eigenvalues of A are 0, ,
then eigenvalues of are 1, ,
example