@songhanshi
2021-05-10T08:42:23.000000Z
字数 303941
阅读 2294
Link
1234
- Link
- improve
- 1-base
- 2-concurrent
- 3-jvm
- ※ 3-JVM(Java Virtual Machine)※
- 4-mysql
- 5-redis
- 8-redis分布式锁
- 5-os&net
- 6-Spring
- mybatis
- 9-中间件
- 0-项目
https://www.nowcoder.com/discuss/594676?source_id=discuss_experience_nctrack&channel=-1
负载均衡--https://blog.csdn.net/My_Way666/article/details/91433816
zk -- https://www.jianshu.com/p/30f3c0ce2c5b
加一个
improve
名词
- 吞吐量:
吞吐量就是处理器用于运行用户代码的时间与处理器总消耗时间的比值:

- DDL:
操作数据库、表、列等(这些对象进行操作),使用的关键字:CREATE、 ALTER、DROP。 - DML:
对表中的数据进行增、删、改的操作,使用的关键字:INSERT 、UPDATE、 DELETE。 - TPS:
TPS(Transactions Per Second,每秒事务处理量)
Transactions Per Second(每秒传输的事务处理个数),即服务器每秒处理的事务数。TPS包括一条消息入和一条消息出,加上一次用户数据库访问。(业务TPS = CAPS × 每个呼叫平均TPS) - QPS:
QPS(Queries Per Second,每秒查询次数)
对应fetches/sec,即每秒的响应请求数,也即是最大吞吐能力。 - IOPS:
简单的理解就是每秒的磁盘操作次数 - Rt(ResponseTime响应时间)
测试工具
性能
- 1 性能方面的三个重要度量指标?
吞吐量、延迟和并发量。
--吞吐量:指的是单位时间内能处理的请求数量。吞吐量越高,说明性能越好。
--延迟:指的是从发出请求到收到响应的时间。延迟越小,说明性能越好。
--并发量:指的是能同时处理的请求数量,一般来说随着并发量的增加、延迟也会增加。所以延迟这个指标,一般都会是基于并发量来说的。例如并发量是 1000 的时候,延迟是 50 毫秒。 - 2 多线程--延迟、吞吐量
--同等条件下,延迟越短,吞吐量越大
--多线程的使用:从度量的角度,主要是降低延迟,提高吞吐量。
怎么降低延迟,提高吞吐量呢?
--“降低延迟,提高吞吐量”的2个方向,一是优化算法,二是将硬件的性能发挥到极致。前者属于算法范畴,后者则是和并发编程相关。
--计算机主要有哪些硬件呢?主要是两类:一个是I/O,一个是CPU。
--简言之,在并发编程领域,提升性能本质上就是提升硬件的利用率,再具体点来说,就是提升 I/O 的利用率和 CPU 的利用率。
--操作系统不是已经解决了硬件的利用率问题了吗?
① 操作系统--解决硬件利用率问题的对象往往是单一的硬件设备。例如操作系统已经解决了磁盘和网卡的利用率问题,利用中断机制还能避免 CPU 轮询 I/O 状态,也提升了CPU的利用率。
② 并发程序--往往需要CPU和I/O设备相互配合工作,即,多线程需要解决CPU和I/O设备综合利用率的问题。
高可用
监控
- 进程监控
- 进程监控:
对于日志监控来说,最见的需求就是收集、存储、查询、展示,开源社区正好有相对应的开源项目: logstash(收集) + elasticsearch(存储+搜索) + kibana(展示) - 项目中:kibana 邮件通知 微信报警通知
1-base
异常
- 异常√|异常
是什么:
-程序运行过程中可以中断程序指令正常执行的事件2种分类:
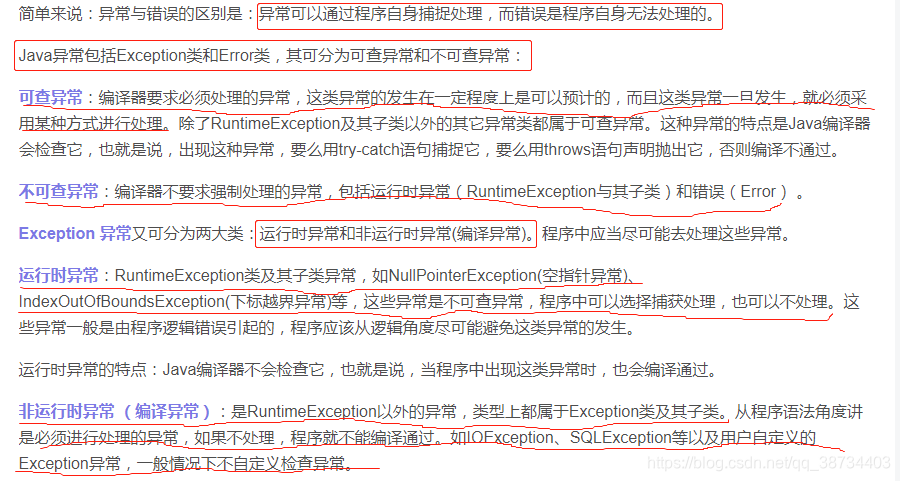
-Error、Exception
-父类都是java.lang.Throwable
-Error 系统错误 rd无法处理
-Exception rd可捕获异常可查异常和不可查异常
生产中:
-空指针
-下标越界
泛型
- Java泛型
- 定义:
-JavaSE1.5的新特性
-本质:参数化类型,即把所操作的类型被指定为一个参数 - 问题:
-类型转换
解决:强转、泛型 - 用法:
-可以使用在类、接口和方法,称为泛型类、泛型接口、泛型方法
-List list = new ArrayList()
改为
List list = new ArrayList();
-只在编译阶段有效,即:
编译过程,程序会正确的检验泛型结果;编译成功后,class文件不包含任何泛型信息
-用?代替任意类型
反射
- Java反射_YSO|反射_zejian
- 定义:
任意类->获取类的所有属性、方法
任意对象->调用它任意属性、方法,并能改变它的属性 - 反射原理
-方法区主要用来存储被加载的类的类型信息->当jvm加载某个类型时,需要类加载器定位到相应的class文件,将其读入jvm,然后jvm提取class中的类型信息,存储到方法区。
-class类
每加载一个新类型,jvm会在堆创建对应的Calss实例,该实例代表此类型,通过Class实例就可以访问到该类型的基本信息。(方法区存储的被加载类的类型信息)
-类型信息在Class中都有对应方法
如,类的全限定名 -> getName()可以获取
-反射机制的实现借助4个类:
class-类的对象
Constructor-类的构造器对象,可以在运行时动态创建对象
Field-类的属性对象,可以在运行时动态修改成员变量的属性值(包含private)
Method-类的方法对象,可以动态调用对象的方法(包含private) - 优缺点:
优:灵活
缺:消耗性能、增加复杂度 应用:
Hibernate怎样知道他要存的某个对象都有什么属性呢?这些属性都是什么类型呢?
应用1 反射原理
1)反射的概念
--概念:运行时,而非编译

2)反射机制的作用
--在运行时判断任意一个对象所属的类
--在运行时获取类的对象
--在运行时访问Java对象的属性,方法,构造方法等
3)实现依赖:reflect&Class
1> java.lang.reflect类库里面主要的类
File:表示类中的成员变量
Method:表示类中的方法
Constructor:表示类的构造方法
Array:该类提供了创建数组和访问数组元素的静态方法
2> 反射依赖的Class类
--概念:用来表示运行时类型信息的对应类
每个类都有唯一一个与之相对应的Class对象。
Class类为类类型,而Class对象为类类型对象。
--Class类的特点:
Class类也是类的一种,class是关键字。
Class类只有一个私有的构造函数,只有JVM能够创建Class类是实例。(只有一个私有构造函数,无法new)

JVM中只有唯一一个和类相对应的Class对象来描述其类型信息。
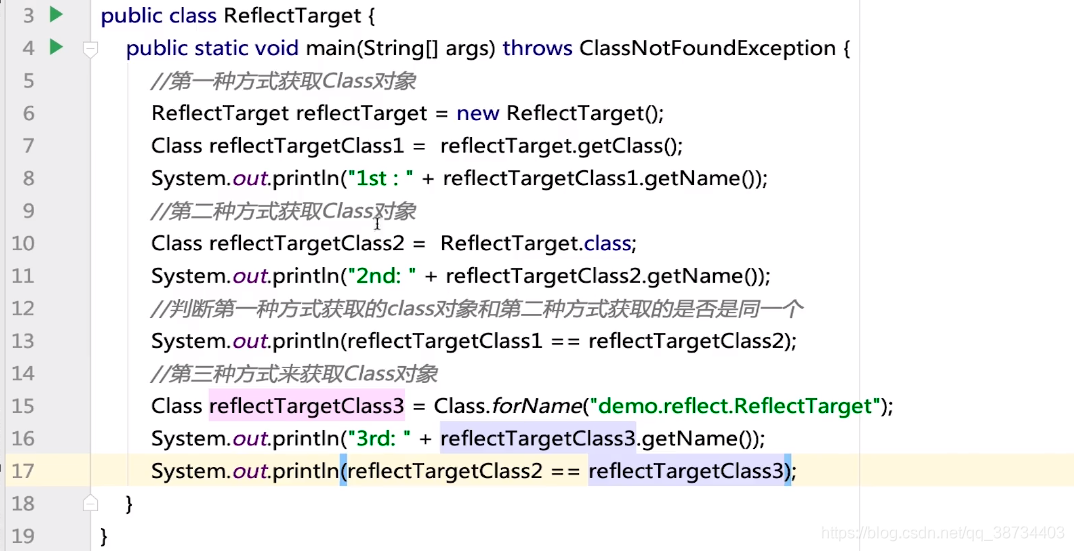
--获取Class对象的三种方式:

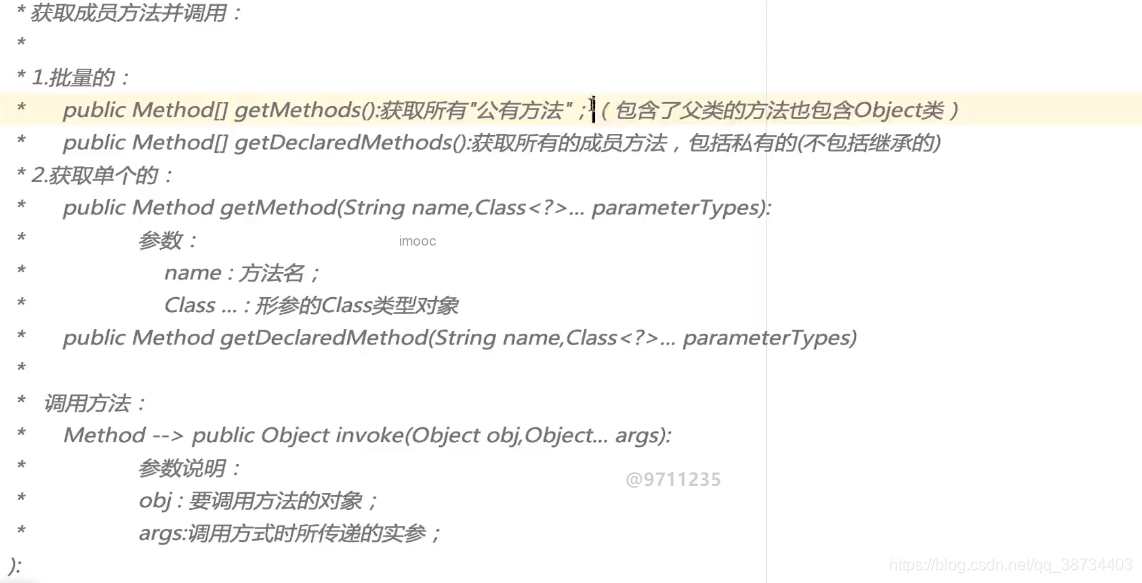
- 2 获取构造方法、成员变量、成员方法

补充:...私有的,或保护、默认、共有;

序列化与反序列化
- 序列化&反序列化
- 序列化:
-是 堆中的对象数据->某种方式->存储到磁盘文件中或传递给其他网络节点的过程。
即,将数据结构或对象转换成二进制的过程 - 反序列化:
-磁盘文件中或网络节点上的对象数据,恢复成Java对象模型的过程。
即,将序列化过程生成的二进制串转换成数据结构或对象 - 存在原因:
-分布式 网络传输对象数据
-服务器钝化:节省内存
对象很久没动,持久化在本地磁盘
需要活动了,先内存,找不到再去磁盘恢复 - 怎么进行序列化?
-① 类 实现序列化接口Serializable 如Integer、String等大多数已实现
-② 判断当前对象是Serializable的实例,允许序列化
-③ Java中使用对象流完成序列化反序列化
序列化ObjectOutputStream:writeObject()
反序列化ObjectInputStream:readObject() - 问题:
① 一些属性不序列化:加 transient
② 序列化版本问题:反序列化出错
对象中增加一个serialVersionUID
深拷贝与浅拷贝
- 深拷贝和浅拷贝
- 创建对象的5种方式
①、通过 new 关键字
②、通过 Class 类的 newInstance() 方法
③、通过 Constructor类的newInstance 方法
④、利用 Clone 方法
⑤、反序列化 - Object类的clone()方法
- 浅拷贝:
-调用对象的clone():Person类必须是实现Cloneable接口并覆写clone()
-P1,P2clone()后,复制了引用,P1某一属性改变,即堆中数据改变,P2也改变
-当前对象的非静态字段复制到新对象
值类型->复制字段
引用类型->复制引用不复制引用的对象;引用同一个对象 - 深拷贝:
-将当前对象的非静态字段复制到该新对象
-值类型、引用类型,都复制独立的一份。
修改其中一个对象的任何内容时,不会影响另一个对象的内容。 - 深拷贝实现:
-Object.clone()只能实现浅拷贝
-2种:
让每个引用类型属性内部重写clone()
弊端:可能嵌套
-利用序列化 实现Serializable接口
设计模式
- 中英文对照
- 观察者模式
- 建造者模式
- 生产者消费者
- https://www.cnblogs.com/chentingk/p/6497107.html
- https://www.cnblogs.com/chentingk/p/6497107.html
https://www.cnblogs.com/conswin/p/6754085.html - 代理模式
- 装饰器模式
- https://www.cnblogs.com/xrq730/p/4908940.html
- 工厂模式
--[简单工厂:https://www.cnblogs.com/java-my-life/archive/2012/03/22/2412308.html
--[工厂方法:https://www.cnblogs.com/java-my-life/archive/2012/03/25/2416227.html
--[抽象工厂:https://www.cnblogs.com/java-my-life/archive/2012/03/28/2418836.html - 适配器模式
生产者-消费者
生产者-消费者模式实现批量执行SQL:
将原来直接INSERT数据到数据库的线程作为生产者线程,生产者线程只需将数据添加到任务队列,然后消费者线程负责将任务从任务队列中批量取出并批量执
行。
--示例:创建了5个消费者线程负责批量执行SQL,
5个消费者线程以 while(true){}循环方式批量地获取任务并批量地执行。
需要注意的是,从任务队列中获取批量任务的方法pollTasks()中,
首先是以阻塞方式获取任务队列中的一条任务,而后则是以非阻塞的方式获取任务;
之所以首先采用阻塞方式,是因为如果任务队列中没有任务,这样的方式能够避免无谓的循环。//任务队列BlockingQueue<Task> bq=new LinkedBlockingQueue<>(2000);//启动5个消费者线程//执行批量任务void start() {ExecutorService es=xecutors.newFixedThreadPool(5);for (int i=0; i<5; i++) {es.execute(()->{try {while (true) {//获取批量任务List<Task> ts=pollTasks();//执行批量任务execTasks(ts);}}catch(Exception e){e.printStackTrace();}});}}//从任务队列中获取批量任务List<Task> pollTasks() throws InterruptedException{List<Task> ts=new LinkedList<>();//阻塞式获取一条任务Task t = bq.take();while(t != null){ts.add(t);//非阻塞式获取一条任务t = bq.poll();}return ts;}//批量执行任务execTasks(List<Task> ts) {//省略具体代码无数}
4.如何实现一个生产者和消费者模型。
3. 消费者重平衡(高可用性、伸缩性)
4. 那些情景下会造成消息漏消费?
5. 如何保证消息不被重复消费(幂等性)
8. 消费者与生产者的工作流程:
单例模式
- 单例模式-YSO|me
- 单例模式特点:
-类只能有一个实例
-类必须自己创建自己的实例
-类必须提供外界获取这个实例的方法 - 懒汉模式-双重校验
-创建变量的2步:(编译优化可调换)
①申请一块内存,用构造方法初始化
②分配指针一个指针指向该内存
-问题:
A线程开始创建Singleton实例(Singleton singleton = null;),已经把instance指向那块内存,还未调用构造方法进行初始化;
此时B已经调用了getInstance,首先判断instance是否为空,A已指向,不为空,B直接吧instance返回。
问题:instance不为null,但A并没有构造完成。
-解决
volatile Singleton singleton = null;/内部静态类
基本类型分类
- 4类8种类型
1)四种整数类型(byte、short、int、long)
2)两种浮点数类型(float、double)
3)一种字符类型(char)
4)一种布尔类型(boolean) - 占位
byte:2个字节 16位
char:2个字节 16位
short :2个字节 16位
int :4个字节 32位
long:8个字节 64位
float:4个字节 32 位
double :8个字节 64位 - 默认值
-byte,short,int类型的默认值为0
-float,double默认值为0.0
-char等价于short其默认值也为0
-boolean的默认值为false。
-java中基本类型的默认值是0,引用类型会默认为null。
哈希表
接口和抽象类

Object-equal、hashcode
- object源码解析_YSO|
- equals()
-equals与==
-Object中的equals 无区别
==比较两个对象在栈中引用地址是否相等
-String重写实现:会获取字符串的内容进行比较
-重写时也需要重写hashcode
保证声明相等对象具有相同哈希代码 - getClass()
-native修饰 操作系统实现 - hashCode()
-native
-作用:返回对象的散列码
-存在意义:往集合中增加元素,equals判断相等,若已存在n个,将会判断n次,效率低
-哈希表 O(1) 比较减少
-应用:
如需存在Map中为key,不重写可能会和对象hash值不一致 - toString()
- notify()/notifyAll()/wait()
- finalize()
-一般jvm自动调用,不需要rd手动调 - registerNatives
- equals和hashCode
两个对象相等,其 hashCode 一定相同;
两个对象不相等,其 hashCode 有可能相同;
hashCode 相同的两个对象,不一定相等;
hashCode 不相同的两个对象,一定不相等;
Integer
- Integer的源码|拆装箱
- 装箱
-直接创建:Integer a=128;
-反编译 Integer a=Integer.valueOf(128);
-valueOf(i)实现
---128 <= i <= 127 返回缓存类中的对象,并没new新的对象
--最后返回new Integer(i); - 拆箱
-实现 intValue() - equals
-先判断比较两个对象的关系
再强转Integer型,拆箱后,转换成两个int,用==比较 - hashcode
直接返回int 数据 return value - compareTo()内部调用compare
-(x < y) ? -1 : ((x == y) ? 0 : 1);
-x < y 返回 -1
x == y 返回 0
x > y 返回 1
String
- String源码_YSO|hashcode乘积因子31?
- public final calss String{
-final修饰,不被任何类继承 - char value[]
一个String字符串->一个char数组 - equals()
equals重写,比较 组成字符串的每一个字符是否相同,相同true,否则false - hashcode
-计算
使用for循环:val[i]和31的幂连乘
for(){h = 31 * h + val[i];}
-为什么是31
@选择奇质数
偶数在乘法运算中会产生溢出,导致信息丢失,*2相当于移位。奇质数优势并不明显,传统。
太大或太小导致分布不佳,冲突率上升
@多奇质数,如,33,41..为什么31
能被jvm优化,乘法运算转移位和减法
31 * i = (i << 5) - i - 常量池
-声明字符串对象的2种形式
①字面量形式直接赋值
String str = "hello";
②new调用构造函数创建对象
String str = new String("hello");
-区别:
字面量/拼接,先在StringTable找,没有 在StringTable创建
new,直接在堆中创建新对象
变量所引用的都是这个新对象的地址,新对象的字符串在StringTable存在,堆指向StringTable对应字符串,不存在,在堆中创建,StringTable不维护 - intern()
public native String intern()
String str1 = "hello";//字面量 只会在常量池中创建对象
String str2 = str1.intern();
-调用intern 常量池中有该对象了,直接返回该字符串的引用(存在堆中就返回堆中,存在池中就返回池中),如果没有,则将该对象添加到池中,并返回池中的引用。 - 不可变?
-可变
private final char value[]
final保证引用不被改变,真实数据为value指向的堆中的数组,操作这个数组便能改变数据。
value基本类型构成,可变,即使private,也可以反射改变。但开发中基本不会 反射机制 操作String
-保证不可变
①public final calss String{
final修饰,不被任何类继承
②private final char value[]
final保证引用不被改变
private不对外界提供修改value数组值的方法。 - 为什么要不可变
①安全
-引发安全问题。
如,数据库的用户名、密码都是以字符串的形式传入来获得数据库的连接。
字符串不可变,值不可改变,否则黑客攻击,改变字符串指向对象值,安全漏洞
-线程安全
并发,多线程同时读写,引发竞态条件,String不可变,线程安全
-HashCode
String不可变,value不变,hashcode固定。Map、Set 等,键值需要保证唯一性和一致性,String更适合。
②性能
当字符串是不可变时,字符串常量池才有意义。
字符串常量池,可以减少创建相同字面量的字符串,让不同的引用指向池中同一个字符串,为运行时节约很多的堆内存。每次创建新的 String不用在堆内开辟出新的空间,占据更多内存。 - 常用方法
charAt(int index)--由下标获取 字符
split--str.split(",", 2)-分为给定正则的匹配
substring--截取一段字符串
intern() --避免在堆中创建字符串 - 为什么String用char数组存储?
理解:
-基本字符类型只有char
-equals对比每个字符
-hashcode循环计算
-charAt()直接获取
-compareTo逐个比较 - Person person = new Person();
Person类的 .class 信息存放在方法区中
person 变量存放在 Java 栈的局部变量表中
真正的 person 对象存放在 Java 堆中
集合概述
- |基础源码解析|
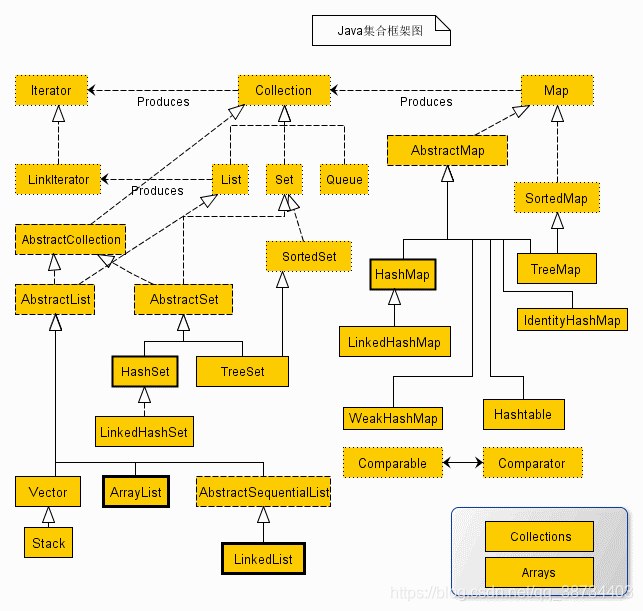
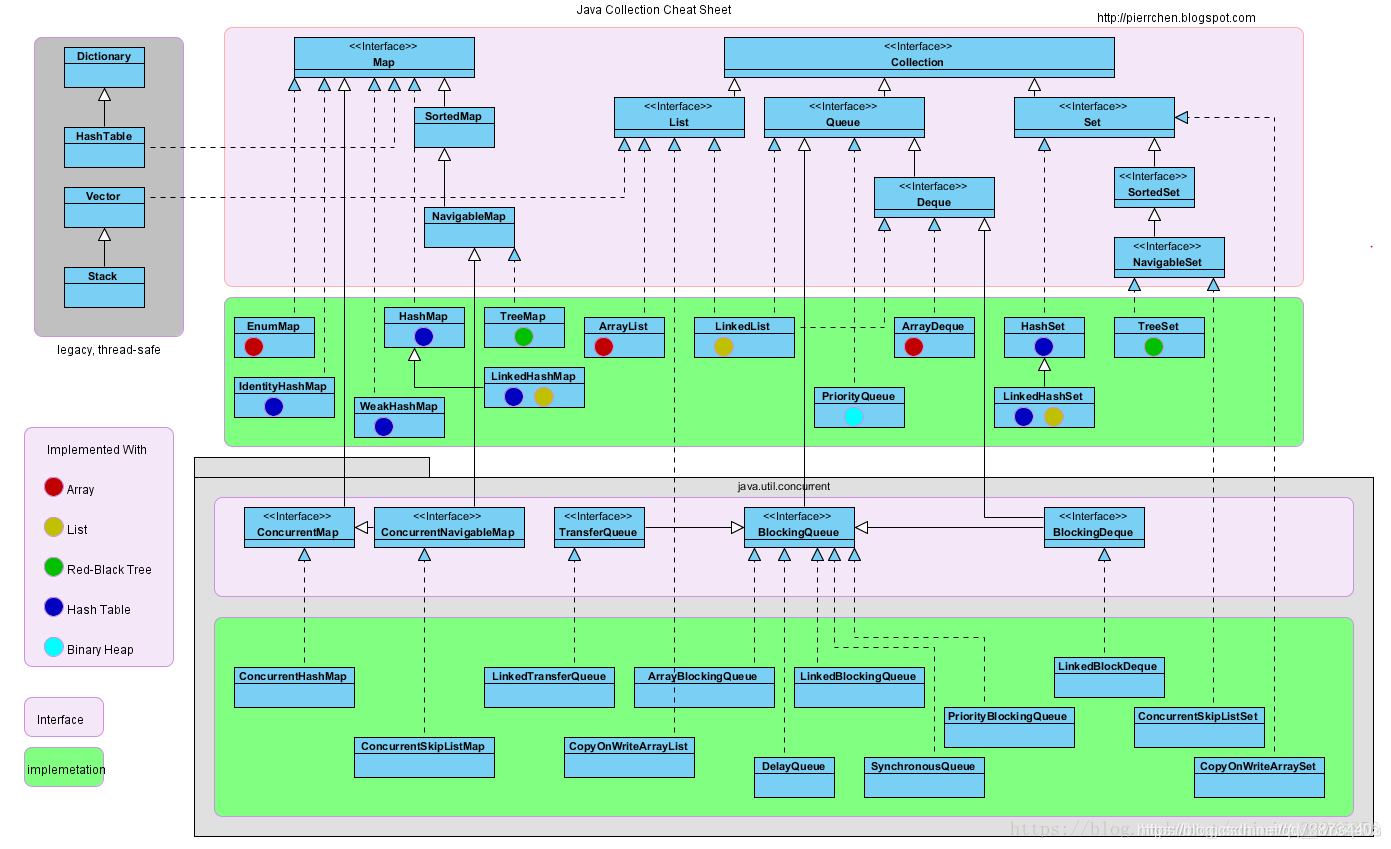
- 1 集合框架概述 /集合架构/集合体系
--参考
--Java 集合框架主要包括2种类型的容器:
① 集合(Collection):存储一个元素集合;
② 图(Map):存储键/值对映射。
Collection 接口又有 3种子类型,List、Set和Queue,再下面是一些抽象类,最后是具体实现类,常用的有 ArrayList、LinkedList、HashSet、LinkedHashSet、HashMap、LinkedHashMap 等等。
2 集合框架内容
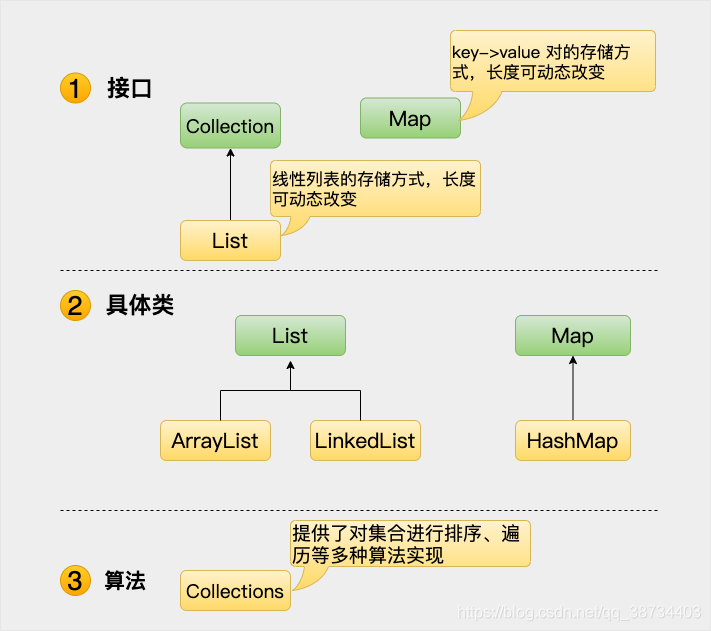
集合框架是一个用来代表和操纵集合的统一架构。所有的集合框架都包含如下内容:
• 接口:是代表集合的抽象数据类型。
例如Collection、List、Set、Map等。之所以定义多个接口,是为了以不同的方式操作集合对象
• 实现(类):是集合接口的具体实现。从本质上讲,它们是可重复使用的数据结构,例如:ArrayList、LinkedList、HashSet、HashMap。
• 算法:是实现集合接口的对象里的方法执行的一些有用的计算,例如:搜索和排序。这些算法被称为多态,那是因为相同的方法可以在相似的接口上有着不同的实现。
--除了集合,该框架也定义了几个Map接口和类。Map 里存储的是键/值对。尽管Map不是集合,但是它们完全整合在集合中。
--java集合框架位于java.util包中,所以当使用集合框架的时候需要进行导包。
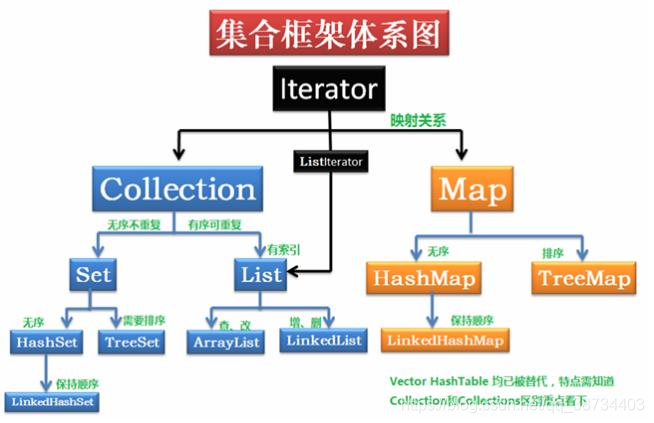
3 List和Set的区别
List 可重复,顺序存储,数组或者链表
Set 不可重复,无序,使用Map来存储数据
Map 键值对,key到value的映射- Key 唯一 无序
- value 不唯一 无序
tips:
list可以插入多个null元素,而set只允许插入一个null元素;
list是一个有序的容器,保持了每个元素的插入顺序。即输出顺序就是输入顺序,而set方法是无序容器,无法保证每个元素的存储顺序,TreeSet通过 Comparator 或者 Comparable 维护了一个排序顺序
4 了解的List和Map
| 接口 | 实现类 |
|---|---|
| List | ArrayList、LinkedList |
| Set | HashSet、TreeSet、LinkedHashSet |
| Map | HashMap、TreeMap、LinkedHashMap、HashTable |
- 5 线程安全的集合
- 线程安全的集合:
Vector | HashTable | StringBuffer - 非线程安全的:
ArrayList|LinkedList|HashMap|HashSet|TreeMap|TreeSet|StringBulider
ArrayList和LinkedList区别
- Arraylist 与 LinkedList 区别? |7
1> 是否保证线程安全:都不安全
2> 底层数据结构:
-Arraylist 底层使用的是Object[]数组;
-LinkedList底层使用的是双向链表数据结构(JDK1.6之前为循环链表,JDK1.7取消了循环。)
3> 插入和删除是否受元素位置的影响: ①ArrayList采用数组存储,所以插入和删除元素的时间复杂度受元素位置的影响。
②LinkedList 采用链表存储,插入删除不受元素位置的影响,但插入和删除指定位置会先移动。
4> 是否支持快速随机访问:
ArrayList 支持。
LinkedList 不支持。
5> 内存空间占用:
ArrayList 的空间浪费体现在列表的结尾会预留一定的容量空间,
LinkedList 的空间花费则体现在它的每一个元素都需要消耗比ArrayList 更多的空间。
ArrayList->CopyOnWriteArrayList
- |1.8ArrayList源码|ArrayList_JG|1.8Arrays源码|for循环删除问题|快速失败安全失败
- 特点:ArrayList 用数组实现的集合,支持随机访问,元素有序且可以重复。
1 实现接口:
public class ArrayList<E> extends AbstractList<E>implements List<E>, RandomAccess, Cloneable, java.io.Serializable{private static final long serialVersionUID = 8683452581122892189L;private static final int DEFAULT_CAPACITY = 10;private static final Object[] EMPTY_ELEMENTDATA = {};private static final Object[] DEFAULTCAPACITY_EMPTY_ELEMENTDATA = {};transient Object[] elementData;private int size;
-Cloneable接口
--Object.clone() 浅拷贝调用 调用的对象必须要实现Cloneable接口,CloneNoSupportException异常
-List接口
--定义了实现该接口的类都必须要实现的一组方法 即平时用到的那些方法2 字段属性
//集合的默认大小private static final int DEFAULT_CAPACITY = 10;//空的数组实例private static final Object[] EMPTY_ELEMENTDATA = {};//这也是一个空的数组实例,和EMPTY_ELEMENTDATA空数组相比是用于了解添加元素时数组膨胀多少private static final Object[] DEFAULTCAPACITY_EMPTY_ELEMENTDATA = {};//存储 ArrayList集合的元素,集合的长度即这个数组的长度//1、当 elementData == DEFAULTCAPACITY_EMPTY_ELEMENTDATA 时将会清空 ArrayList//2、当添加第一个元素时,elementData 长度会扩展为 DEFAULT_CAPACITY=10transient Object[] elementData;//表示集合的长度rivate int size;
3 构造函数
-无参:创建初始容量为0的数组public ArrayList() {this.elementData = DEFAULTCAPACITY_EMPTY_ELEMENTDATA;}
-参数->初始大小n:
public ArrayList(int initialCapacity) {if (initialCapacity > 0) {this.elementData = new Object[initialCapacity];} else if (initialCapacity == 0) {this.elementData = EMPTY_ELEMENTDATA;} else {throw new IllegalArgumentException("Illegal Capacity: "+initialCapacity);}}
n>0 大小为n的数组
=0 空数组实例 <0 异常
-参数->集合:将集合复制到ArrayList集合中
-new ArrayList()--elementData赋值为DEFAULTCAPACITY_EMPTY_ELEMENTDATA,
new ArrayList(0)--elementData 赋值为 EMPTY_ELEMENTDATA,EMPTY_ELEMENTDATA添加元素会扩容到容量为1,而DEFAULTCAPACITY_EMPTY_ELEMENTDATA扩容之后容量为10
-elementData
transient修饰,JDK不想将整个elementData都序列化或者反序列化,而只是将size和实际存储的元素序列化或反序列化,节省空间和时间。- 4 add
-扩容实现:Arrays.copyOf(),创建一个更大的数组,将原数组元素拷贝过去
-扩容规则:((旧容量 * 3) / 2) + 1 原数组被抛弃,会被GC回收。
-add(e)
1 确认集合大小,满了,扩容
ensureCapacityInternal(size+1) 集合大小+1后判断
2 将元素加入elementData[size++]
-add(e)实现
1)无参构造一个空集合 初始长度 0
2)第1个add(a) 会创建一个长度10的数组,a在第一个位置
3)第2个add(b) 集合不为空 且集合长度size+1<数组长度10 添加 无需扩容
4)第11个add(c)
size+1=11 数组长度10 创建10+10*0.5=15的数组(1,5倍) Arrays.copyOf将原数组元素引用拷贝到新数组 c添加到index为10的位置
5)原容量的1.5倍比minCapacity小,那么就扩容到minCapacity,即size+1
5)第Integer.MAX_VALUE-8= 2147483639个,然后 2147483639%1.5=1431655759(这个数是要进行扩容) 次添加元素,为了防止溢出,此时会直接创建一个 1431655759+1 大小的数组,这样一直,每次添加一个元素,都只扩大一个范围。
6)Integer.MAX_VALUE - 7个
创建大小为Integer.MAX_VALUE的数组,再进行元素添加。
MAX_ARRAY_SIZE = Integer.MAX_VALUE - 8
7)第Integer.MAX_VALUE + 1个
抛出OutOfMemoryError 异常。 5 remove
-单个元素的删除:后续元素左移 引用置空GC回收
-for问题:删除某个元素后,list的大小size发生了变化,而索引也在变化,所以会导致你在遍历的时候漏掉某些元素。
如,删除第1个元素后,继续根据索引访问第2个元素时,因为删除的关系后面的元素都往前移动了一位,所以实际访问的是第3个元素。不会报出异常,只会出现漏删的情况;6 迭代器
-类实现了List接口,而List接口又继承了Collection接口,Collection接口又继承了Iterable接口
-删除
*迭代器初始化过程中会将modCount这个值赋给迭代器的expectedModCount
*Itr的next()迭代的时候,被遍历期间如果内容发生变化,就会改变modCount的值,会校验modCount是否等于expectedModCount
*Itr的remove()移除之后将modCount重新赋值给 expectedModCount(不是ArrayList的remove)
-缺点:迭代器只能向后遍历,不能向前遍历,能够删除元素,但是不能新增元素- 7 trimToSize()
确定不再新增元素 复制 - 8 线程不安全
①多线程add发生覆盖
-添加元素2步:
1 计入元素 2移动标志位
elementData[index] = element;
size++;
单线程:i=0,add元素在位置0,size=1
多线程:size=0,A将元素放到位置0挂起,B获取cpu,size=0,元素存储在0位置,AB对size都+1,size=2,但只有一个元素
②扩容发生越界
数组大小为10,add(e),A添加第10个元素,判断容量不需扩容,挂起,B判断不需扩容,添加元素,移动标志位,此时A继续,但已越界 9 modCount
-父类AbstractList modCount属性--记录数组修改次数(可查看源码865行)
-ConcurrentModification Exception。即并发修改异常
-快速失败:
在使用迭代器对集合进行迭代的过程中,如果 A 线程正在对集合进行遍历,此时 B 线程对集合进行修改(增加、删除、修改),或者 A 线程在遍历过程中对集合进行修改,都会导致 A 线程抛出 ConcurrentModificationException 异常。
保证modCount在迭代期间不变
-安全失败:
采用安全失败机制的集合容器,在遍历时不是直接在集合内容上访问的,而是先复制原有集合内容,在拷贝的集合上进行遍历。
由于迭代时是对原集合的拷贝进行遍历,所以在遍历过程中对原集合所作的修改并不能被迭代器检测到,故不会抛 ConcurrentModificationException 异常- 内存够用情况下ArrayList插入10w条数据?优化?
LinkedList
- LinkedList
1 类
// 类public class LinkedList<E>extends AbstractSequentialList<E>implements List<E>, Deque<E>, Cloneable, java.io.Serializable{transient int size = 0;transient Node<E> first;transient Node<E> last;....// Node节点private static class Node<E> {E item;Node<E> next;Node<E> prev;Node(Node<E> prev, E element, Node<E> next) {this.item = element;this.next = next;this.prev = prev;}}
- 特点:
链表实现,有序且可重复
继承于AbstractSequentialList的双向链表 - Deque接口
-ArrayList多实现一个接口,双向队列
-栈、队列或双端队列
-队列:Queue queue = new LinkedList<>();
-双端队列:Deque deque = new LinkedList<>(); - 数据结构
双向链表:删除时不需要遍历就可以找到前后元素 - 内存分配
数组:确定大小,分配内存
链表:无确定大小,通过指针的移动指向下一个内存地址的分配 - 添加元素
添加元素,改变元素上下指针引用,无需扩容
modCount++ - 依次删除
-删除同时 下标会变 删错
-增删modCount++,抛出异常 - 迭代器遍历快
-游标记录当前访问元素的位置,遍历一个元素,记录一个位置。
HashMap->ConcurrentHashMap
1 HashMap实现原理
-- JDK1.6&1.7:位桶数组+链表
-- JDK1.8:位桶数组+链表+红黑树
遇到冲突时,HashMap是采用的链地址法/拉链法来解决;2 HashMap定义:
--散列表,存储键值对(key-value)映射,key和value都可为null
public class HashMap extends AbstractMap
implements Map, Cloneable, Serializable {
• Map接口,键值对映射通用的操作。
key有序,不重复;value无序,可重复
• 承抽象类 AbstractMap,可以不用实现所有的Map接口方法,选择性
• 继承了AbstractMap,实现了Map接口,是否多此一举?LinkedHashSet类似。3 字段属性
===初始化的数据值===
--serialVersionUID //序列化和反序列化 一致性
--DEFAULT_INITIAL_CAPACITY=1<<4; //默认集合初始容量为16(必须是2的倍数)
--MAXIMUM_CAPACITY = 1 << 30; //最大容量,带参超过此数,默认使用此数
--DEFAULT_LOAD_FACTOR = 0.75f; //默认的填充因子
==下三个是JDK1.8新增,进行红黑树和链表互相转换==
--TREEIFY_THRESHOLD = 8; //当桶(bucket)上的结点数大于8转成红黑树
--UNTREEIFY_THRESHOLD = 6; //桶(bucket)上节点数小于6转链表
--MIN_TREEIFY_CAPACITY = 64; //集合中的容量大于这个值时,桶才能进行树形化,否则桶内元素太多时会扩容,而不是树形化,为了避免进行扩容、树形化选择的冲突,这个值不能小于4*TREEIFY_THRESHOLD
===初始化结构和属性===
--Node[] table; //初始化长度默认是DEFAULT_INITIAL_CAPACITY= 16。长度总是 2的幂
--Set> entrySet; //保存缓存的entrySet()
--size; //集合中存放key-value 的实时数量
--modCount; //记录集合被修改的次数,用于迭代器中的快速失败
--threshold; //调整大小的下一个大小值(容量*加载因子)。capacity*loadFactor。capacity是桶的数量,即table的长度length。当前已占用数组长度的最大值。超过这个数目就重新resize(扩容),扩容后的HashMap容量是之前容量的两倍。
--loadFactor; //加载因子,用来衡量HashMap满的程度;实时装载因子的计算:size/capacity,loadFactor为什么默认的负载因子0.75
--泊松分布(tips:有点关系)|0.75
--默认负载因子(0.75)在时间和空间成本上提供了很好的折衷。较高的值会降低空间开销,但提高查找成本(体现在大多数的HashMap类的操作,包括get和put)。设置初始大小时,应该考虑预计的entry数在map及其负载系数,并且尽量减少rehash操作的次数。如果初始容量大于最大条目数除以负载因子,rehash操作将不会发生。
--为1:当负载因子是1.0时,也就意味着,只有当数组的值全部填充了,才会发生扩容。这就带来了很大的问题,因为Hash冲突时避免不了的。
后果:当负载因子是1.0的时候,意味着会出现大量的Hash的冲突,底层的红黑树变得异常复杂。对于查询效率极其不利。这种情况就是牺牲了时间来保证空间的利用率。
因此一句话总结就是负载因子过大,虽然空间利用率上去了,但是时间效率降低了。
--为0.5
后果:负载因子是0.5的时候,这也就意味着,当数组中的元素达到了一半就开始扩容,既然填充的元素少了,Hash冲突也会减少,那么底层的链表长度或者是红黑树的高度就会降低。查询效率就会增加。
但是,此时空间利用率就会大大的降低,原本存储1M的数据,现在就意味着需要2M的空间。
总之,就是负载因子太小,虽然时间效率提升了,但是空间利用率降低了。
--选择0.75作为默认的加载因子,完全是时间和空间成本上寻求的一种折衷选择。
--负载因子是0.75的时,空间利用率比较高,而且避免了相当多的Hash冲突,使得底层的链表或者是红黑树的高度比较低,提升了空间效率。4 构造函数
容量_ab
① 默认无参构造函数
无参构造器,初始化散列表的加载因子为0.75
this.loadFactor = DEFAULT_LOAD_FACTOR;
② 指定初始容量的构造函数
public HashMap(int initialCapacity, float loadFactor) {
->判断初始化容量initialCapacity,<0,异常,>max,赋值max
->判断加载因子,<0,或非数值,异常
->赋值:
this.loadFactor = loadFactor;
this.threshold = tableSizeFor(initialCapacity);
--tableSizeFor(cap)方法:
{
int n = cap - 1;
n |= n >>> 1;
n |= n >>> 2;
n |= n >>> 4;
n |= n >>> 8;
n |= n >>> 16;
return (n < 0) ? 1 : (n >= MAXIMUM_CAPACITY) ? MAXIMUM_CAPACITY : n + 1;
}
---这块右移的目的:对于一个数字的二进制,从第一个不为0的位开始,把后面的所有位都设置成1。
---几次无符号右移和按位或运算,把1100 1100 1100转换成了1111 1111 1111 ,再把1111 1111 1111加1,就得到了1 0000 0000 0000,这就是大于1100 1100 1100的第一个2的幂。
//返回大于等于initialCapacity的最小的二次幂数值。>>>操作符表示无符号右移,高位取0。|按位或运算5 hash算法
HashMap中的hash函数?Hash算法(扰动函数) |3
--散列函数|散列表:
哈希表通过把关键码值映射到表中一个位置来访问记录,以加快查找的速度。这个映射函数叫做散列函数,存放记录的数组叫做散列表。
散列函数的存在能够帮助我们更快的确定key和value的映射关系
--HashMap中的哈希算法:确定哈希桶数组索引位置
--三步:
①取hashCode值:key.hashCode()
②高位参与运算:h>>>16
③取模运算:(n-1)&hashstatic final int hash(Object key) {int h;return (key == null) ? 0 : (h = key.hashCode()) ^ (h >>> 16);}// 使用:这一步是在后面添加元素putVal()方法中进行位置的确定i = (table.length - 1) & hash(key);
--散列函数设计的越好,使得元素分布的越均匀。
hashmap容量为什么是2的幂次
-get()中,(table.length -1)&hash计算出key在table索引位置
-length是2的n次方时,(length-1)&hash等价于length取模,即hash%length,但是&比%具有更高的效率。比如 n % 32 =(32 -1)&n
--为什么?
n-1的二进制永远都是尾端以连续1的形式表示,当(n - 1) & hash会保留hash中后 x 位的 1
0&0 0&1 都为0
1&0 1&1 分布更均匀,减少碰撞几率,加快了查询的效率,空间浪费少。
1|26 put
//hash(key)就是上面讲的hash方法,对其进行了第一步和第二步处理public V put(K key, V value) {return putVal(hash(key), key, value, false, true);}/**** @param hash 索引的位置* @param key 键* @param value 值* @param onlyIfAbsent true 表示不要更改现有值* @param evict false表示table处于创建模式* @return*/final V putVal(int hash, K key, V value, boolean onlyIfAbsent,boolean evict) {Node<K,V>[] tab; Node<K,V> p; int n, i;//如果table为null或者长度为0,则进行初始化//resize()方法本来是用于扩容,由于初始化没有实际分配空间,这里用该方法进行空间分配,后面会详细讲解该方法if ((tab = table) == null || (n = tab.length) == 0)n = (tab = resize()).length;//注意:这里用到了前面讲解获得key的hash码的第三步,取模运算,下面的if-else分别是 tab[i] 为null和不为nullif ((p = tab[i = (n - 1) & hash]) == null)tab[i] = newNode(hash, key, value, null);//tab[i] 为null,直接将新的key-value插入到计算的索引i位置else {//tab[i] 不为null,表示该位置已经有值了Node<K,V> e; K k;if (p.hash == hash &&((k = p.key) == key || (key != null && key.equals(k))))e = p;//节点key已经有值了,直接用新值覆盖//该链是红黑树else if (p instanceof TreeNode)e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);//该链是链表else {for (int binCount = 0; ; ++binCount) {if ((e = p.next) == null) {p.next = newNode(hash, key, value, null);//链表长度大于8,转换成红黑树if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1sttreeifyBin(tab, hash);break;}//key已经存在直接覆盖valueif (e.hash == hash &&((k = e.key) == key || (key != null && key.equals(k))))break;p = e;}}if (e != null) { // existing mapping for keyV oldValue = e.value;if (!onlyIfAbsent || oldValue == null)e.value = value;afterNodeAccess(e);return oldValue;}}++modCount;//用作修改和新增快速失败if (++size > threshold)//超过最大容量,进行扩容resize();afterNodeInsertion(evict);return null;}
图示

put过程图
-为什么在1.8中链表大于8时会转红黑树?
因为泊松分布,拉链法哈希冲突累积到七个元素后,通过泊松分布计算得到第8个冲突元素出现的概率极低,几乎不可能出现,但只要出现了就树形化提高查询效率(前提是数组长度已经到了64,否则先扩容)
-为什么要用红黑树?而不用平衡二叉树? |2
--Java8之前,链表解决冲突的,产生碰撞,进行get时,两步的时间复杂度是O(1)+O(n)。因此,当碰撞很厉害的时候n很大,O(n)的速度显然是影响速度的。
--Java8中,红黑树替换链表,复杂度就变成了O(1)+O(logn)了,这样在n很大的时候,能够比较理想的解决这个问题
-如果两个键的hashcode相同,你如何获取值对象?
找到bucket位置之后,会调用keys.equals()方法去找到链表中正确的节点,最终找到要找的值对象。
-size:hashMap怎么获取有几个元素,底层实现public int size() {return size;}// 计算if (++size > threshold)//超过最大容量,进行扩容 -58resize(); -59
数组上有5个,某链表上3个,size是多大?
分析第58,59 行代码,调用put()方法添加元素,就会++size(这里有个例外是插入重复key的键值对,不会调用,但是重复key元素不会影响size),所以,上面是 7。7 resize
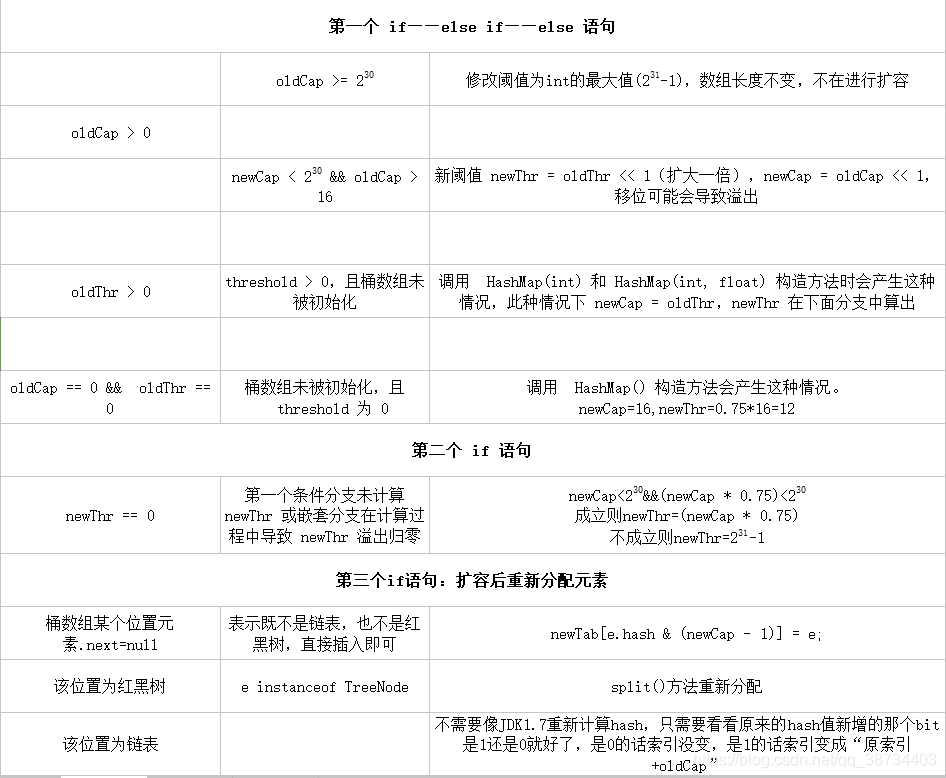
- 扩容机制
先介绍 JDK1.7的扩容源码,便于理解,然后在介绍JDK1.8的源码。
//参数 newCapacity 为新数组的大小void resize(int newCapacity) {Entry[] oldTable = table;//引用扩容前的 Entry 数组int oldCapacity = oldTable.length;if (oldCapacity == MAXIMUM_CAPACITY) {//扩容前的数组大小如果已经达到最大(2^30)了threshold = Integer.MAX_VALUE;///修改阈值为int的最大值(2^31-1),这样以后就不会扩容了return;}Entry[] newTable = new Entry[newCapacity];//初始化一个新的Entry数组transfer(newTable, initHashSeedAsNeeded(newCapacity));//将数组元素转移到新数组里面table = newTable;threshold = (int)Math.min(newCapacity * loadFactor, MAXIMUM_CAPACITY + 1);//修改阈值}void transfer(Entry[] newTable, boolean rehash) {int newCapacity = newTable.length;for (Entry<K,V> e : table) {//遍历数组while(null != e) {Entry<K,V> next = e.next;if (rehash) {e.hash = null == e.key ? 0 : hash(e.key);}int i = indexFor(e.hash, newCapacity);//重新计算每个元素在数组中的索引位置e.next = newTable[i];//标记下一个元素,添加是链表头添加newTable[i] = e;//将元素放在链上e = next;//访问下一个 Entry 链上的元素}}}
- 扩容机制
- JDK1.7中首先是创建一个新的大容量数组,然后依次重新计算原集合所有元素的索引,然后重新赋值。如果数组某个位置发生了hash冲突,使用的是单链表的头插入方法,同一位置的新元素总是放在链表的头部,这样与原集合链表对比,扩容之后的可能就是倒序的链表了。
1.8源码
final Node<K,V>[] resize() {Node<K,V>[] oldTab = table;int oldCap = (oldTab == null) ? 0 : oldTab.length;//原数组如果为null,则长度赋值0int oldThr = threshold;int newCap, newThr = 0;if (oldCap > 0) {//如果原数组长度大于0// 超过最大值就不再扩充了,就只好随你碰撞去吧if (oldCap >= MAXIMUM_CAPACITY) {//数组大小如果已经大于等于最大值(2^30)threshold = Integer.MAX_VALUE;//修改阈值为int的最大值(2^31-1),这样以后就不会扩容了return oldTab;}//原数组长度大于等于初始化长度16,并且原数组长度扩大1倍也小于2^30次方// 没超过最大值,就扩充为原来的2倍else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY &&oldCap >= DEFAULT_INITIAL_CAPACITY)newThr = oldThr << 1; // 阀值扩大2倍}else if (oldThr > 0) //旧阀值大于0,则将新容量直接等于就阀值newCap = oldThr;else {//阀值等于0,oldCap也等于0(集合未进行初始化)newCap = DEFAULT_INITIAL_CAPACITY;//数组长度初始化为16newThr = (int)(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY);//阀值等于16*0.75=12}//计算新的阀值上限if (newThr == 0) {float ft = (float)newCap * loadFactor;newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ?(int)ft : Integer.MAX_VALUE);}threshold = newThr;@SuppressWarnings({"rawtypes","unchecked"})Node<K,V>[] newTab = (Node<K,V>[])new Node[newCap];table = newTab;if (oldTab != null) {//把每个bucket都移动到新的buckets中for (int j = 0; j < oldCap; ++j) {Node<K,V> e;if ((e = oldTab[j]) != null) {oldTab[j] = null;//元数据j位置置为null,便于垃圾回收if (e.next == null)//数组没有下一个引用(不是链表)newTab[e.hash & (newCap - 1)] = e;else if (e instanceof TreeNode)//红黑树((TreeNode<K,V>)e).split(this, newTab, j, oldCap);else { // preserve orderNode<K,V> loHead = null, loTail = null;Node<K,V> hiHead = null, hiTail = null;Node<K,V> next;do {next = e.next;//原索引if ((e.hash & oldCap) == 0) { //★if (loTail == null)loHead = e;elseloTail.next = e;loTail = e;}//原索引+oldCapelse {if (hiTail == null)hiHead = e;elsehiTail.next = e;hiTail = e;}} while ((e = next) != null);//原索引放到bucket里if (loTail != null) {loTail.next = null;newTab[j] = loHead;}//原索引+oldCap放到bucket里if (hiTail != null) {hiTail.next = null;newTab[j + oldCap] = hiHead;}}}}}return newTab;}
相比于JDK1.7,1.8使用的是2次幂的扩展(指长度扩为原来2倍),所以,元素的位置要么是在原位置,要么是在原位置再移动2次幂的位置。我们在扩充HashMap的时候,不需要像JDK1.7的实现那样重新计算hash,只需要看看原来的hash值新增的那个bit是1还是0就好了,是0的话索引没变,是1的话索引变成“原索引+oldCap”
8 线程安全
|线程不安全_ab|
** HashMap线程安全吗?为什么不安全?不安全怎么办? |3**
-线程不安全的,其主要体现:
1)在jdk1.7中,在多线程环境下,扩容时会造成死循环(环形链)或数据丢失。-头插
2)在jdk1.8中,在多线程环境下,会发生数据覆盖的情况。-尾插
-过程分析:线程不安全
分析过程结合阅读9 remove
-删除元素
首先,找到桶的位置,如果是链表,则进行链表遍历,找到需要删除的元素后,进行删除;如果是红黑树,也是进行树的遍历,找到元素删除后,进行平衡调节,
注意:红黑树的节点数小于 6 时,会转化成链表。
-遍历删除:
当遍历Map需要删除的时候,不可以for循环遍历,否则会产生并发修改异常CME,只能使用迭代器iterator.remove()来删除元素,或者使用线程安全的concurrentHashMap来删除Map中删除元素(concurrentHashMap和迭代器Iterator遍历删除)10 get
- 查找元素
①、通过 key 查找 value
首先通过 key 找到计算索引,找到桶位置,先检查第一个节点,如果是则返回,如果不是,则遍历其后面的链表或者红黑树。其余情况全部返回 null。
public V get(Object key) {Node<K,V> e;return (e = getNode(hash(key), key)) == null ? null : e.value;}final Node<K,V> getNode(int hash, Object key) {Node<K,V>[] tab; Node<K,V> first, e; int n; K k;if ((tab = table) != null && (n = tab.length) > 0 &&(first = tab[(n - 1) & hash]) != null) {//根据key计算的索引检查第一个索引if (first.hash == hash && // always check first node((k = first.key) == key || (key != null && key.equals(k))))return first;//不是第一个节点if ((e = first.next) != null) {if (first instanceof TreeNode)//遍历树查找元素return ((TreeNode<K,V>)first).getTreeNode(hash, key);do {//遍历链表查找元素if (e.hash == hash &&((k = e.key) == key || (key != null && key.equals(k))))return e;} while ((e = e.next) != null);}}return null;}
②、判断是否存在给定的 key 或者 value
public boolean containsKey(Object key) {return getNode(hash(key), key) != null;}public boolean containsValue(Object value) {Node<K,V>[] tab; V v;if ((tab = table) != null && size > 0) {//遍历桶for (int i = 0; i < tab.length; ++i) {//遍历桶中的每个节点元素for (Node<K,V> e = tab[i]; e != null; e = e.next) {if ((v = e.value) == value ||(value != null && value.equals(v)))return true;}}}return false;}
-HashMap没有直接提供getNode接口给用户调用,而提供的get函数,而get函数就是通过getNode来取得元素的。
- 查找元素
get(key)方法时获取key的hash值,计算hash&(n-1)得到在链表数组中的位置first=tab[hash&(n-1)],先判断first的key是否与参数key相等,不等就遍历后面的链表找到相同的key值返回对应的Value值即可
11 遍历
- equals()和hashCode()的都有什么作用?-
通过对key的hashCode()进行hashing,并计算下标( n-1 & hash),从而获得buckets的位置。如果产生碰撞,则利用key.equals()方法去链表或树中去查找对应的节点
- equals()和hashCode()的都有什么作用?-
12 1.7 1.8区别
- hashMap1.8有什么改动
HashTable
- 1 HashMap与HashTable区别
HashMap
-- 线程不安全;
-- 是一个接口,是 Map的一个子接口,
-- 是将键映射到值得对象,不允许键值重复,允许空键和空值;
-- 非线程安全, HashMap的效率要较 HashTable 的效率高一些.
HashTable
-- 线程安全的集合;
-- 不允许 null 值作为一个 key 值或者 Value 值;
*HashTable 是 sychronize(同步化),多个线程访问时不需要自己为它的方法实现同步,而HashMap在被多个线程访问的时候需要自己为它的方法实现同步;
区别 :
(1)HashMap方法没有synchronized修饰,线程非安全,HashTable线程安全;
(2)HashMap允许key和value为null,而HashTable不允许
2.底层实现:数组+链表实现
jdk8开始链表高度到8、数组长度超过64,链表转变为红黑树,元素以内部类Node节点存在计算key的hash值,二次hash然后对数组长度取模,对应到数组下标,如果没有产生hash冲突(下标位置没有元素),则直接创建Node存入数组,如果产生hash冲突,先进行equal比较,相同则取代该元素,不同,则判断链表高度插入链表,链表高度达到8,并且数组长度到64则转变为红黑树,长度低于6则将红黑树转回链表key为null,存在下标0的位置
数组扩容
HashSet
- |源码解析|
- 1 字段属性
--HashMap map; //HashSet集合中的内容是通过 HashMap 数据结构来存储的
--Object PRESENT = new Object();//向HashSet中添加数据,数据在上面的 map 结构是作为 key 存在的,而value统一都是 PRESENT - 2 add
public boolean add(E e) {return map.put(e, PRESENT)==null;} - 重复set
往set里面put一个学生对象,然后将这个学生对象的学号改了,再put进去,可以放进set么?并讲出为什么
不可以放进,hashcode不变
https://www.cnblogs.com/Spades7/p/8206671.html - 线程不安全
- hashset为什么不是线程安全的,描述场景
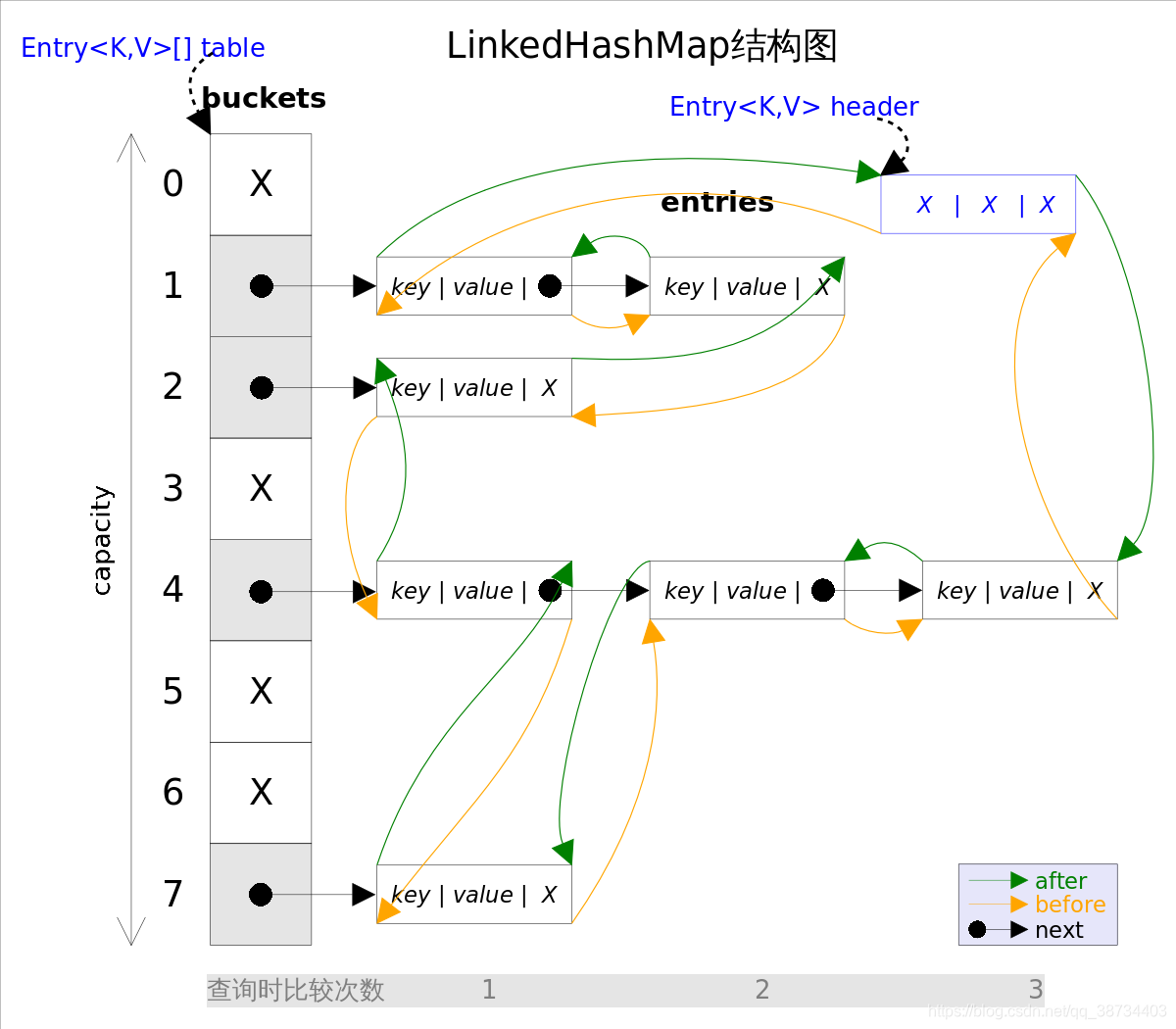
LinkedHashMap
-
public class LinkedHashMap<K,V>extends HashMap<K,V>implements Map<K,V>
- 有序
在HashMap基础上单独维护了一个具有所有数据的双向链表,链表保证了元素迭代的顺序。 - 应用
- 1 基本用法
--LinkedHashMap是HashMap的子类,但是内部还有一个双向链表维护键值对的顺序,每个键值对既位于哈希表中,也位于双向链表中。LinkedHashMap支持两种顺序插入顺序 、 访问顺序
① 插入顺序:先添加的在前面,后添加的在后面。修改操作不影响顺序
② 访问顺序:所谓访问指的是get/put操作,对一个键执行get/put操作后,其对应的键值对会移动到链表末尾,所以最末尾的是最近访问的,最开始的是最久没有被访问的,这就是访问顺序。
2 实现访问顺序排序
LinkedHashMap有5个构造方法,其中4个都是按插入顺序,只有一个是可以指定按访问顺序:public LinkedHashMap(int initialCapacity, float loadFactor, boolean accessOrder)
其中参数accessOrder就是用来指定是否按访问顺序,如果为true,就是访问顺序。
3 使用按访问有序实现缓存
在LinkedHashMap添加元素后,会调用removeEldestEntry防范,传递的参数时最久没有被访问的键值对,如果方法返回true,这个最久的键值对就会被删除。LinkedHashMap中的实现总返回false,该子类重写后即可实现对容量的控制public class LRUCache<K, V> extends LinkedHashMap<K, V> {private int maxEntries;public LRUCache(int maxEntries) {super(16, 0.75f, true);this.maxEntries = maxEntries;}@Overrideprotected boolean removeEldestEntry(Map.Entry<K, V> eldest) {return size() > maxEntries;}}
使用该缓存:
LRUCache<String,Object> cache = new LRUCache<>(3);cache.put("a","abstract");cache.put("b","basic");cache.put("c","call");cache.get("a");cache.put("d","滴滴滴");System.out.println(cache); // 输出为:{c=call, a=abstract, d=滴滴滴}
LinkedHashSet
-
public class LinkedHashSet<E>extends HashSet<E>implements Set<E>, Cloneable, java.io.Serializable {
- 有序且不能重复
- 底层是通过LinkedHashMap来实现的
public boolean add(E e) {
return map.put(e, PRESENT)==null;
}
通过 map.put() 方法来添加元素,说明了该方法如果新插入的key不存在,则返回null,如果新插入的key存在,则返回原key对应的value值(注意新插入的value会覆盖原value值)。
也就是说 add(E e) 方法,会将 e 作为 key,PRESENT 作为 value 插入到 map 集合中,如果 e 不存在,则插入成功返回 true;如果存在,则返回false。
TreeMap
- 1.8TreeMap源码|
- 红黑树实现的有序的 key-value 集合
- TreeMap按key|value排序
类
public class TreeMap<K,V>extends AbstractMap<K,V>implements NavigableMap<K,V>, Cloneable, java.io.Serializable
TreeSet
collections
- Arrays工具类怎么用?
- collections有哪些?
2-concurrent
线程、进程、程序
- os_JG|
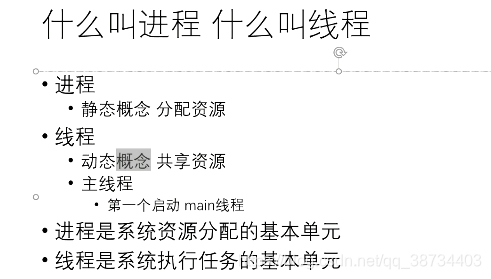
- 1 概念
1)程序:
程序是计算机的一组指令,经过编译和执行才能最终完成程序设计的动作。
2)进程:一段程序的执行过程。
一个可执行的、具有独立功能的程序关于某个数据集合的一次执行过程,也是操作系统进行资源分配和调度的基本单位。
3)线程:程序执行的最小单元。
是操作系统能够进行运算调度的最小单位,被包含在进程之中,是进程中的实际运作单位。一条线程指的是进程中一个单一顺序的控制流,一个进程中可以并发多个线程,每条线程并行执行不同的任务 - 2 区别和关联
--关联:
一个进程中可以有多个线程,多个线程共享进程的堆和方法区(JDK1.8之后的元空间)资源,但是每个线程有自己的程序计数器、虚拟机栈 和 本地方法栈。
--区别:
线程和进程最大的不同在于基本上各进程是独立的,而各线程则不一定,因为同一进程中的线程极有可能会相互影响。线程执行开销小,但不利于资源的管理和保护;而进程正相反。 - 3 程序如何运行:
程序(源文件)在硬盘上,需要把程序加载进内存,然后由CPU去执行相应的指令去操作寄存器中的数据(从内存中装载进来),比如加减乘除什么的。
--写->硬盘;运行->内存;指令操作->cpu寄存器 4 进程间的通讯(IPC)
--共享内存是最快的IPC方式
--进程间通信(Java和os有区别):
① 消息队列(MessageQueue)
② 共享内存(SharedMemory) :实现
③ 信号量(Semphore)
④ 套接字(Socket)
⑤ 管道(PIPE)
⑥ 命名管道(FIFO)线程进程(协程)区别? |3 结合具体的操作系统windows/mac/linux?
- jg:从JVM的角度来说一下线程和进程之间的关系
缓存一致性
- 缓存的工作原理:
是当CPU要读取一个数据时,首先从缓存中查找,如果找到就立即读取并送给CPU处理;如果没有找到,就用相对慢的速度从内存中读取并送给CPU处理,同时把这个数据所在的数据块调入缓存中,可以使得以后对整块数据的读取都从缓存中进行,不必再调用内存。
--CPU缓存:是为了缓解CPU和内存之间速度的不匹配问题。
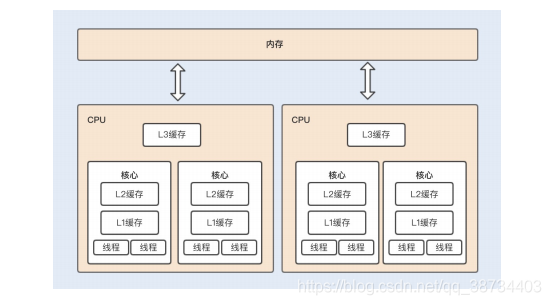
--这大大节省了CPU直接读取内存的时间,也使CPU读取数据时基本无需等待。总的来说,CPU读取数据的顺序是先缓存后内存。 CPU内存模型
--CPU缓存可以分为一级缓存(L1)、二级缓存(L2)和三级缓存(L3),每一级缓存中所储存的全部数据都是下一级缓存的一部分。当CPU要读取一个缓存数据时,首先会从一级缓存中查找;如果没有找到,再从二级缓存中查找;如果还是没有找到,就从三级缓存或内存中查找。
--单核CPU:
如果是单核CPU运行多线程,多个线程同时访问进程中的共享数据,CPU 将共享变量加载到高速缓存后,不同线程在访问缓存数据的时候,都会映射到相同的缓存位置,这样即使发生线程的切换,缓存仍然不会失效。
--多核CPU:
如果是多核CPU运行多线程,每个核都有一个L1缓存,如果多个线程运行在不同的内核上访问共享变量时,每个内核的 L1 缓存将会缓存一份共享变量。
缓存一致性协议
MESI是四种缓存段状态的首字母缩写,任何多核系统中的缓存段都处于这四种状态之一。我将以相反的顺序逐个讲解,因为这个顺序更合理:
失效(Invalid)缓存段,要么已经不在缓存中,要么它的内容已经过时。为了达到缓存的目的,这种状态的段将会被忽略。一旦缓存段被标记为失效,那效果就等同于它从来没被加载到缓存中。
共享(Shared)缓存段,它是和主内存内容保持一致的一份拷贝,在这种状态下的缓存段只能被读取,不能被写入。多组缓存可以同时拥有针对同一内存地址的共享缓存段,这就是名称的由来。
独占(Exclusive)缓存段,和S状态一样,也是和主内存内容保持一致的一份拷贝。区别在于,如果一个处理器持有了某个E状态的缓存段,那其他处理器就不能同时持有它,所以叫“独占”。这意味着,如果其他处理器原本也持有同一缓存段,那么它会马上变成“失效”状态。
已修改(Modified)缓存段,属于脏段,它们已经被所属的处理器修改了。如果一个段处于已修改状态,那么它在其他处理器缓存中的拷贝马上会变成失效状态,这个规律和E状态一样。此外,已修改缓存段如果被丢弃或标记为失效,那么先要把它的内容回写到内存中——这和回写模式下常规的脏段处理方式一样。一些问题:(多线程环境下尤其)
缓存一致性问题: 当多个处理器的运算任务都涉及同一块主内存区域时,将可能导致各自的缓存数据不一致的情况,如果真的发生这种情况,需要各个处理器访问缓存时都遵循一些协议,在读写时要根据协议来进行操作,这类协议有MSI、MESI等。
指令重排序问题: 为了使得处理器内部的运算单元能尽量被充分利用,处理器可能会对输入代码进行乱序执行(Out-Of-Order Execution)优化,处理器会在计算之后将乱序执行的结果重组,保证该结果与顺序执行的结果是一致的,但并不保证程序中各个语句计算的先后顺序与输入代码中的顺序一致。- CPU上的缓存是用来临时存储cpu和内存交换的数据的,硬盘上的缓存用来临时存储硬盘和内存交换的数据的。
缓存一致性问题?
问题:
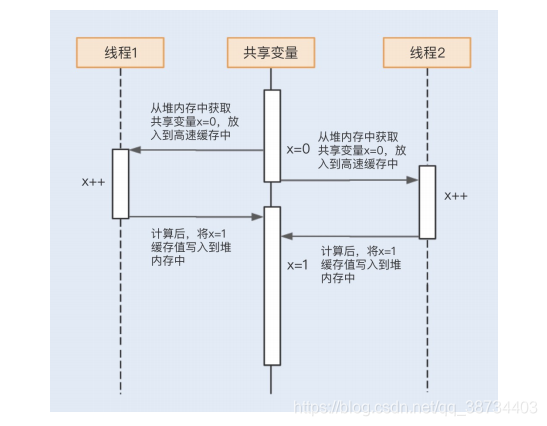
假设有两个线程(线程1和线程2)分别执行下面的方法,x是共享变量:public class Example {int x = 0;public void count() {x++; //1System.out.println(x)//2}}
多核CPU:如果是多核CPU运行多线程,每个核都有一个L1缓存,如果多个线程运行在不同的内核上访问共享变量时,每个内核的L1缓存将会缓存一份共享变量。
1,1 的运行结果:
- 缓存一致性协议,CPU-Cache角度?
--解决缓存不一致问题
--是一种广泛使用的支持写回策略的缓存一致性协议,该协议被应用在Intel奔腾系列的CPU中;
-- MESI分别代表缓存行数据所处的四种状态,通过对这四种状态的切换,来达到对缓存数据进行管理的目的。 - 什么是强一致性?
结合Happens-before规则,可以将一致性分为以下几个级别:
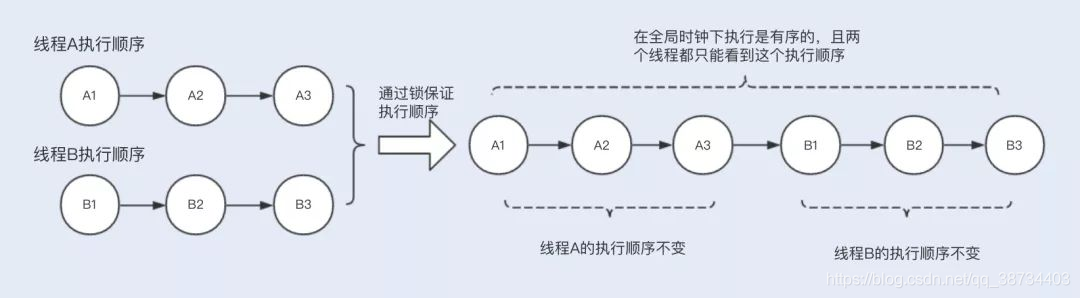
严格一致性(强一致性):所有的读写操作都按照全局时钟下的顺序执行,且任何时刻线程读取到的缓存数据都是一样的,Hashtable 就是严格一致性;
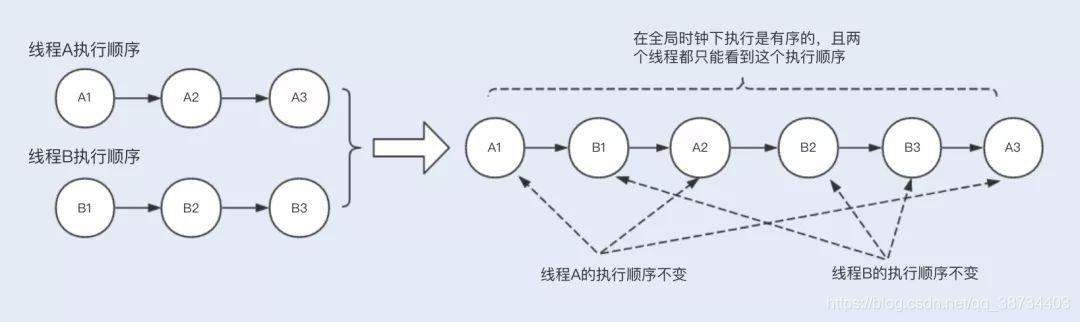
顺序一致性:多个线程的整体执行可能是无序的,但对于单个线程而言执行是有序的,要保证任何一次读都能读到最近一次写入的数据,volatile可以阻止指令重排序,所以修饰的变量的程序属于顺序一致性;
弱一致性:不能保证任何一次读都能读到最近一次写入的数据,但能保证最终可以读到写入的数据,单个写锁+无锁读,就是弱一致性的一种实现。
并发安全、活跃、性能问题?
- ans:安全、活跃、性能
- 1-安全性:
-- 问题:会出现原子性问题、可见性问题和有序性问题线程不安全问题。
-- 有多个线程会同时读写同一数据,需要一一考虑原子性问题、可见性问题和有序性问题
-- 数据竞争:当多个线程同时访问同一数据,并且至少有一个线程会写这个数据的时候,如果我们不采取防护措施,那么就会导致并发Bug
-- 竞态条件:指的是程序的执行结果依赖线程执行的顺序
-- 解决:锁 - 2-活跃性:
-- 概念:指的是某个操作无法执行下去。
-- 活跃性问题:死锁、活锁、饥饿
① 死锁:发生“死锁”后,线程会互相等待,而且会一直等待下去,技术上表现形式是线程永久地“阻塞”了。
② 活锁:线程没发生阻塞,但仍存在执行不下去的情况。
解决:尝试等待等待一个随机时间
③ 饥饿:指的是线程因无法访问所需资源而无法执行下去的情况。
三种解决方案:
一是保证资源充足,二是公平地分配资源,三就是避免持有锁的线程长时间执行。
-- 一、三的适用场景比较有限,因为很多场景下,资源的稀缺无法解决的,持有锁的线程执行的时间也很难缩短。
-- 公平地分配资源
并发编程里,主要使用公平锁,一种先来后到的方案,线程的等待是有顺序的,排在等待队列前面的线程会优先获得资源。 - 3-性能问题
-- 衡量标准:吞吐量、延迟和并发量
-- 尽量减少串行
-- 避免锁带来的性能问题
线程安全
- 线程不安全:
1)《深入理解Java虚拟机》原文:
当多个线程访问同一个对象时,如果不用考虑这些线程在运行时环境下的调度和交替运行,也不需要进行额外的同步,或者在调用方进行任何其他的协调操作,调用这个对象的行为都可以获取正确的结果,那这个对象是线程安全的。
2)线程安全的问题原因
一般是主内存和工作内存数据不一致性、重排序导致。
3)例子
① 数据不一致
在i++一组指令执行过程中,cpu是有可能切换线程的,如果在当前线程t1被挂起之后其他线程修改了这个对象的a属性值,那么恢复线程执行时t1线程将会覆盖其他线程已经修改过的值。
https://blog.csdn.net/yongjie910203/article/details/79763382
② 指令重排 - java线程安全都体现在哪些方面
- ans:原子性、可见性、有序性
- 原子性:提供互斥访问,同一时刻只能有一个线程对数据进行操作,(atomic,synchronized);
- 可见性:一个线程对主内存的修改可以及时地被其他线程看到,(synchronized,volatile);
- 有序性:一个线程观察其他线程中的指令执行顺序,由于指令重排序,该观察结果一般杂乱无序,(happens-before原则)。
- java线程间通信? |2
- 线程间通信的模型有两种:共享内存和消息传递
- 共享内存:volatile 关键字、synchronized关键字同步、JUC工具类 CountDownLatch
- 消息传递:Object类的wait() 和 notify() 方法
待完善:https://aalion.github.io/2019/12/28/concurrency11/
https://blog.csdn.net/jisuanji12306/article/details/86363390
https://www.cnblogs.com/lgyxrk/p/10404839.html
- 说说java保证线程间同步的方法 | 2
使用同步方法 public synchronized void save(){}
使用同步代码块synchronized(object){}
使用特殊域变量(volatile)实现线程同步
使用重入锁ReetrantLock实现线程同步
使用局部变量实现线程同步 ThreadLocal
使用阻塞队列实现线程同步 LinkedBlockingQueue
使用原子变量实现线程同步AtomicInteger
线程间的同步的方式有哪些呢?
🙋 :线程同步是两个或多个共享关键资源的线程的并发执行。应该同步线程以避免关键的资源使用冲突。操作系统一般有下面三种线程同步的方式:
互斥量(Mutex):采用互斥对象机制,只有拥有互斥对象的线程才有访问公共资源的权限。因为互斥对象只有一个,所以可以保证公共资源不会被多个线程同时访问。比如 Java 中的 synchronized 关键词和各种 Lock 都是这种机制。
信号量(Semphares) :它允许同一时刻多个线程访问同一资源,但是需要控制同一时刻访问此资源的最大线程数量
事件(Event) :Wait/Notify:通过通知操作的方式来保持多线程同步,还可以方便的实现多线程优先级的比较操
- 说说java保证线程间同步的方法 | 2
JMM和volatile
谈谈JMM(sxt2) 参考:volitile部分
1 JMM基本概念 -P39
1) 概念
Java内存模型(Java Memory Model,JMM)本身是一种抽象的概念,并不真实存在,它描述的是一组规则或规范,通过这组规范定义了程序中各个变量(包括实例字段,静态字段和构成数组对象的元素)的访问方式。
-Java线程间的通信采用的是共享Java内存模型(简称JMM),JMM决定一个线程对共享变量的写入何时对另一个线程可见.
-JMM的必要性:线程安全
2)JMM三大特性:为线程安全得到保证
① 可见性:主内存有更改,工作内存第一时间被通知改变
② 原子性:
③ 有序性
3)JMM关于同步的规定
1、线程解锁前,必须把共享变量的值刷新回主内存;
2、线程加锁前,必须读取主内存的最新值到自己的工作内存;
3、加锁解锁是同一把锁;
4)Java内存模型把内存分成了两部分:线程栈区和堆区
5)由于JVM运行程序的实体是线程,而每个线程创建时JVM都会为其创建一个工作内存(有些地方称为栈空间),工作内存是每个线程的私有数据区域,而Java内存模型中规定所有的变量都存储在主内存,主内存是共享内存区域,所有的线程都可以访问,但线程对变量的操作(读取赋值等)必须在工作内存中进行,首先要将变量从主内存拷贝到自己的工作内存空间,然后对变量进行操作,操作完成后在将变量写回主内存,不能直接操作主内存中的变量,各个线程的工作内存中存储着主内存中的变量副本拷贝,因此不同的线程间无法访问对方的工作内存,线程间的通信必须通过主内存来完成。

-注:存储 硬盘<内存(<缓存Cache) 主内存、线程自己的工作内存
6)cpu缓存:
why:cpu在内部cpu寄存器中处理数据,cpu缓存在主内存、寄存器之间,空间小,访问速度比主内存快的多。解决:cpu操作主内存同一地址数据,内存处理数据慢,需要等待,可以在cpu缓存存储一份直接获取。
流程:cpu访问主存时,先读取一部分主存数据到CPU缓存(当然如果CPU缓存中存在需要的数据就会直接从缓存获取),进而在读取CPU缓存到寄存器,当CPU需要写数据到主存时,同样会先刷新寄存器中的数据到CPU缓存,然后再把数据刷新到主内存中。
7)重排序类型以及可能带来的问题
编译器优化重排:不改变单线程语义下,语句执行顺序
指令并行重排:不存在数据依赖,机器指令执行顺序
内存系统重排:三级缓存,内存与缓存的数据同步存在时间差,加载(load)和存储(store)执行顺序
8)JMM解决方案:
①原子性:
JVM自身提供的对基本数据类型读写操作;
方法级别或者代码块级别--synchronized或重入锁(ReentrantLock)
②可见性:
synchronized或volatile
③指令重排导致的可见性和有序性:
volatile解决,其另外一个作用就是禁止重排序优化
④ happens-before:
JMM内部定义的happens-before原则保证多线程环境下两个操作间的原子性、可见性以及有序性。
9)happens-before原则:
①程序顺序原则
②锁规则 解锁(unlock)操作必然发生在后续的同一个锁的加锁(lock)之前。
③volatile规则 volatile变量的写,先发生于读,这保证了volatile变量的可见性。
④线程启动规则 线程的start()方法先于它的每一个动作,即如果线程A在执行线程B的start方法之前修改了共享变量的值,那么当线程B执行start方法时,线程A对共享变量的修改对线程B可见
⑤传递性 A先于B ,B先于C 那么A必然先于C
⑥线程终止规则 线程的所有操作先于线程的终结,Thread.join()等待当前执行的线程终止。
⑦线程中断规则
interrupt()的调用先行发生于被中断线程的代码检测到中断事件的发生,Thread.interrupted()检测线程是否中断。
⑧对象终结规则 对象的构造函数执行,结束先于finalize()方法2 说说volatile?(sxt2)
-volatile是Java提供的轻量级的同步机制(轻量级synchronized)
-三个特性:① 保证内存可见性 ② 不保证原子性 ③ 禁止指令重排序
(Volatile变量具有synchronized的可见性特性,但是不具备原子特性。防止指令重排。)Ⅰ 可见性
1.① 保证内存可见性(sxt2)volatile有什么特点,怎么保证可见性的
volatile可以保证可见性,及时通知其他线程,主物理内存的值已被修改。
1)可见性的保证是基于CPU的内存屏障指令,抽象为happens-before原则,确保一个线程的修改能对其他线程是可见的。
2)volatile保证了修饰的共享变量在转换为汇编语言时,会加上一个以lock为前缀的指令,当CPU发现这个指令时,立即会做两件事情:
① 将当前内核中线程工作内存中该共享变量刷新到主存;
② 通知其他内核里缓存的该共享变量内存地址无效;
3)happens-before
① 作用:指定两个操作之间的执行顺序。即:如果A线程的写操作a与B线程的读操作b之间存在happens-before关系,尽管a操作和b操作在不同的线程中执行,但JMM向程序员保证a操作将对b操作可见。
②示例:A happens-before B: A操作的结果将对B可见,且A的执行顺序排在B之前。
-线程修改了volatile变量,先写到工作内存还是主内存
volatile修饰的变量在被修改后会处理器直接将结果stroe和write进主内存,同时使得其他线程的工作内存缓存失效,实现可见性
https://www.sohu.com/a/399318783_120591934Ⅱ 非原子性
② 不保证原子性(sxt2)
1) 不保证原子性,会出现写丢失(写覆盖),线程太快
2)i++在多线程下是非线程安全的,如何不加synchronized解决?
volatile不保证原子性的原因?
例子:i++被拆分3个指令:(字节码)
Ⅰ 执行getfield拿到原始n;
Ⅱ 执行iadd进行加1;
Ⅲ 执行putfile写吧累加后的值写回
-写覆盖问题:拷贝回自己的内存空间,每个人都拿到0,写回到主内存时,线程1写回到的时候被挂起了,线程2歘的写回了。然后线程1恢复后又写回了一遍,把原来的1给覆盖了。
-解决:AtomicInteger 保证原子性
addAndget[++i]、getAndAdd[i++]
decrementAndGet、getAndDecrement【加1】
作用:
-volatile 的一个重要作用就是和CAS结合,保证了原子性,详细的可以参见 java.util.concurrent.atomic 包下的类,比如 AtomicInteger。
https://blog.csdn.net/weixin_40460171/article/details/106473323
多线程访问volatile long a变量?
--long存储的前32bit和后32bit可能不是同时更新
--volatile 除了保证可见性和有序性, 还解决了 long 类型和 double 类型数据的 8 字节赋值问题.
虚拟机规范中允许对 64 位数据类型, 分为 2 次 32 位的操作来处理, 当读取一个非 volatile 类型的 long 变量时,如果对该变量的读操作和写操作不在同一个线程中执行, 那么很有可能会读取到某个值得高 32 位和另一个值得低 32 位.
详细:Ⅲ 禁止指令重排
③ 禁止指令重排序(sxt2)
为了提高性能,编译器和处理器常常会对指令进行重排序。一般分为如下3种:

处理器在进行指令重排时,必须考虑指令之间的数据依赖(数据依赖不可重排)
--重排示例2:
多线程环境中线程交替执行,由于编译器优化重排的存在,两个线程中使用的变量能否保证一致性是无法确定的,结果无法预测。public class Test{int a = 0;boolean flag = flse;public void method1(){a = 1; // 这两个语句会发生编译器重排flag = true;}public void method2(){if(flag){a = a + 5;sout("retVale:" + a);}}}
volatile如何禁止指令重排(sxt2)
内存屏障
--volatile实现进制指令重排优化,从而避免多线程环境下程序出现乱序执行的现象。
--首先了解一个概念,内存屏障(Memory Barrier)又称内存栅栏,是一个CPU指令,它的作用有两个:
① 保证特定操作的顺序
② 保证某些变量的内存可见性(利用该特性实现volatile的内存可见性)
由于编译器和处理器都能执行指令重排的优化,如果在指令间插入一条Memory Barrier则会告诉编译器和CPU,不管什么指令都不能和这条Memory Barrier指令重排序,也就是说 通过插入内存屏障禁止在内存屏障前后的指令执行重排序优化。 内存屏障另外一个作用是刷新出各种CPU的缓存数,因此任何CPU上的线程都能读取到这些数据的最新版本。(注,即可见性)

即就是过在Volatile的写和读的时候,加入屏障,防止出现指令重排的
(
在每个volatile写操作的前面插入一个StoreStore屏障;
在每个volatile写操作的后面插入一个StoreLoad屏障;
在每个volatile读操作的后面插入一个LoadLoad屏障;
在每个volatile读操作的后面插入一个LoadStore屏障。
注意:volatile写是在前面和后面分别插入内存屏障,而volatile读操作是在后面插入两个内存屏障
)
--线程安全获得保证
① 工作内存与主内存同步延迟现象导致的可见性问题
可通过synchronized或volatile关键字解决,他们都可以使一个线程修改后的变量立即对其它线程可见
② 对于指令重排导致的可见性问题和有序性问题
可以使用volatile关键字解决,因为volatile关键字的另一个作用就是禁止重排序优化Ⅳ 怎么用
volatile在哪里使用(sxt2)
volatile 常用于多线程环境下的单次操作(单次读或者单次写)。
1) 双重检测(Double Check Lock,DCL):(https://blog.csdn.net/qq_38734403/article/details/106976266)- 问题:DCL机制不一定线程安全,原因是有指令重排序的存在,加入volatile可以禁止指令重排。
instance = new SingletonDemo();可以分为以下3步骤完成(伪代码)
memory = allocate(); //1.分配对象内存空间instance(memory); //2.初始化对象instance = memory; //3.设置instance指向刚分配的内存地址,此时instance != null
步骤2和步骤3 不存在数据依赖关系,而且无论重排前还是重排后程序的执行结果在单线程中没有改变,因此这种重排优化是允许的。
memory = allocate(); //1.分配对象内存空间instance = memory; //3.设置instance指向刚分配的内存地址,此时instance != null,但是对象还没有初始化完成!instance(memory); //2.初始化对象
但是指令重排只会保证穿行语义的执行的一致性(单线程),但并不会关心多线程间的语义一致性。所以当一条线程访问instance不为null时,由于instance实例未必已初始化完成,也就造成了线程安全问题。
- Volatile实现原理/底层实现? &作用
- 可见性的保证是基于 CPU 的内存屏障指令,抽象为happens-before原则
- volatile的一个重要作用就是和CAS结合,保证了原子性
- Volatile的写和读的时候,加入屏障,防止出现指令重排
synchronized
- Java性能调优_jk|synchronized_zejian|如何使用synchronized|
1 synchronized在1.6之后的改动?
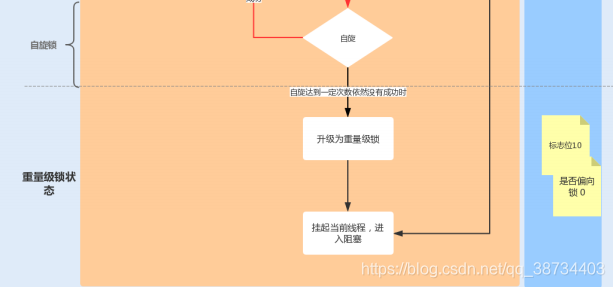
--JDK1.6 对锁的实现引入了大量的优化,如偏向锁、轻量级锁、自旋锁、适应性自旋锁、锁消除、锁粗化等技术来减少锁操作的开销。
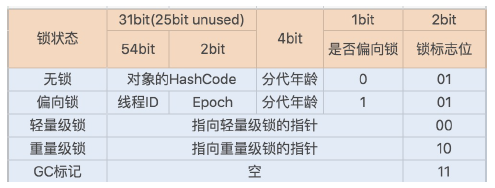
--锁主要存在四种状态,依次是:无锁状态、偏向锁状态、轻量级锁状态、重量级锁状态,他们会随着竞争的激烈而逐渐升级。注意锁可以升级不可降级,这种策略是为了提高获得锁和释放锁的效率。2 4种用法
1)修饰一个代码块:同步代码块
① synchronized(this){
② synchronized(obj){//指定要给某个对象加锁,// 关键字在代码块上,锁为括号里面的对象
作用范围:大括号{}括起来的代码
作用对象:调用这个代码块的对象;
2)修饰一个方法:同步方法
写法1:synchronized void method(){
写法2:public void method(){
synchronized(this) {
作用范围:整个方法
作用对象:调用这个方法的所有对象;
非static方法时,获取的是对象锁(即类的实例对象) ,类的实例的锁。
3)修饰一个静态的方法:
synchronized static void method() {
作用范围:整个静态方法
作用对象:这个类的所有对象;
获取的是类锁(即Class本身,注意:不是实例),类的Class对象的锁。
4)修饰一个类:
synchronized(ClassName.class) {
作用范围:synchronized后面括号括起来的部分
作用对象:这个类的所有对象。4 synchornized的底层原理
--Synchronized实现同步锁的方式有两种,一种是修饰方法,一种是修饰方法块
--Java虚拟机中的同步(Synchronization)基于进入和退出管程(Monitor)对象实现,无论是显式同步还是隐式同步都是如此。
-- 显式同步-同步代码块:有明确的 monitorenter 和 monitorexit 指令,即同步代码块
-- 隐式同步-同步方法:synchronized修饰的同步方法是Java中同步用的最多;由方法调用指令读取运行时常量池中方法的ACC_SYNCHRONIZED标志来隐式实现的显式同步-同步代码块
--由 monitorenter和 monitorexit 指令来实现同步的。
--进入 monitorenter 指令后,线程将持有 Monitor 对象,退出 monitorenter指令后,线程将释放该 Monitor 对象。

隐式同步-同步方法
--JVM使用了 ACC_SYNCHRONIZED访问标志来区分一个方法是否是同步方法。
--过程:当方法调用时,调用指令检查该方法是否被设置 ACC_SYNCHRONIZED 访问标志。
如果设置了该标志,执行线程将先持有 Monitor对象,然后再执行方法。在该方法运行期间,其它线程将无法获取到该Mointor 对象,当方法执行完成后,再释放该Monitor 对象。

Synchronized修饰方法是怎么实现锁原理
--JVM中的同步是基于进入和退出管程(Monitor)对象实现的。每个对象实例都会有一个Monitor,Monitor可以和对象一起创建、销毁。Monitor 是由 ObjectMonitor实现,而ObjectMonitor 是由 C++ 的 ObjectMonitor.hpp 文件实现。
--ObjectMonitor.hpp
ObjectMonitor() {
_header = NULL;
_count = 0; // 记录个数
_waiters = 0,
_recursions = 0;
_object = NULL;
_owner = NULL;
_WaitSet = NULL; // 处于 wait 状态的线程,会被加入到 _WaitSet
_WaitSetLock = 0 ;
_Responsible = NULL ;
_succ = NULL ;
_cxq = NULL ;
FreeNext = NULL ;
_EntryList = NULL ; // 处于等待锁 block 状态的线程,会被加入到该列表
_SpinFreq = 0 ;
_SpinClock = 0 ;
OwnerIsThread = 0 ;
}
1)变量
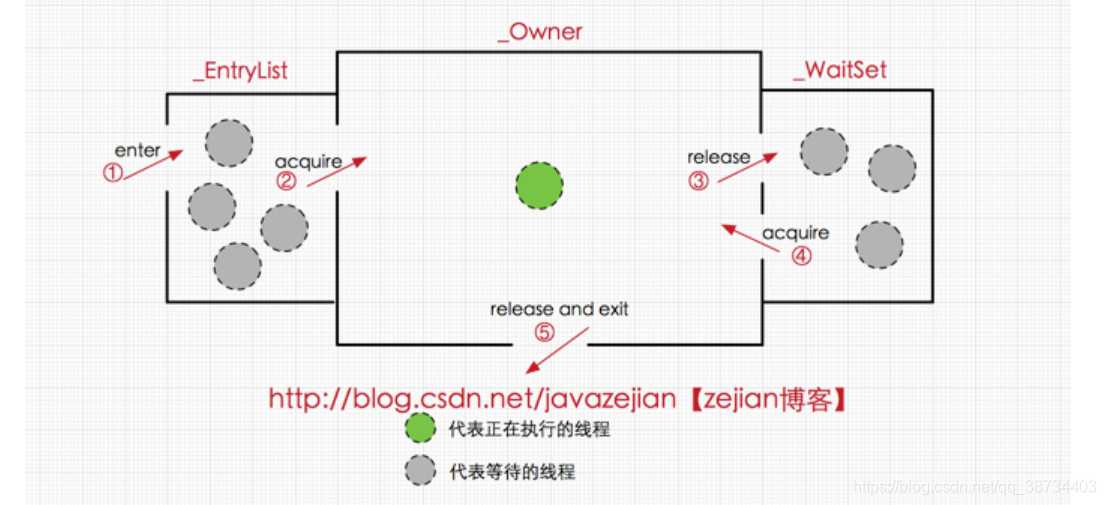
ObjectMonitor中有两个队列,_WaitSet 和 _EntryList,用来保存ObjectWaiter对象列表(每个等待锁的线程都会被封装成ObjectWaiter对象)
_owner指向持有ObjectMonitor对象的线程
2)流程
Monitor 是依靠底层操作系统的 Mutex Lock 来实现互斥的
--多个线程同时访问一段同步代码时,多个线程会先被存放在 EntryList集合中,处于block状态的线程,都会被加入到该列表。
--当线程获取到对象的Monitor后进入 _Owner区域并把monitor中的owner变量设置为当前线程同时monitor中的计数器count加1
①若线程申请 Mutex成功,则持有该Mutex,其它线程将无法获取到该Mutex。当前线程执行完毕也将释放monitor(锁)并复位变量的值,以便其他线程进入获取monitor(锁)
②若线程调用 wait()方法,将将释放当前持有的monitor,,释放当前持有的Mutex,owner变量恢复为null,count自减1,同时该线程会进入 WaitSet集合中,等待下一次被唤醒。如果当前线程顺利执行完方法,也将释放 Mutex。

3 synchronized可重入实现
--定义:当一个线程再次请求自己持有对象锁的临界资源时,这种情况属于重入锁。
--在一个线程调用synchronized方法的同时在其方法体内部调用该对象另一个synchronized方法,也就是说一个线程得到一个对象锁后再次请求该对象锁,是允许的,这就是synchronized的可重入性。
注意另外一种情况,当子类继承父类时,子类也是可以通过可重入锁调用父类的同步方法。
--实现:
synchronized是基于monitor实现的,因此每次重入,monitor中的计数器仍会加1。
每个锁关联一个线程持有者和一个计数器。当计数器为0时表示该锁没有被任何线程持有,那么任何线程都都可能获得该锁而调用相应方法。当一个线程请求成功后,JVM会记下持有锁的线程,并将计数器计为1。此时其他线程请求该锁,则必须等待。而该持有锁的线程如果再次请求这个锁,就可以再次拿到这个锁,同时计数器会递增。当线程退出一个synchronized方法/块时,计数器会递减,如果计数器为0则释放该锁。- volatile和synchronized的区别?
区别 - 其他重入锁
① synchronized
② java.util.concurrent.locks.ReentrantLock
synchronized锁升级
- Java性能调优_jk|synchronized_zejian
- Monitor是依赖于底层的操作系统实现,存在用户态与内核态之间的切换,所以增加了性能开销,因此引出锁升级
- 在JDK1.6以前,使用synchronized就只有一种方式即重量级锁,而在JDK1.6以后,引入了偏向锁,轻量级锁,重量级锁,来减少竞争带来的上下文切换。
- 1 对象头
--对象实例(堆内存):对象头、实例数据、对齐填充。
--对象头:Mark Word、指向类的指针、数组长度 - 锁升级功能主要依赖于 Mark Word中的锁标志位和释放偏向锁标志位,
- 1)偏向锁

--在高并发场景下,当大量线程同时竞争同一个锁资源时,偏向锁就会被撤销,发生stop the word 后,通过添加JVM参数关闭偏向锁来调优系统性能,
-XX:-UseBiasedLocking // 关闭偏向锁(默认打开)
或
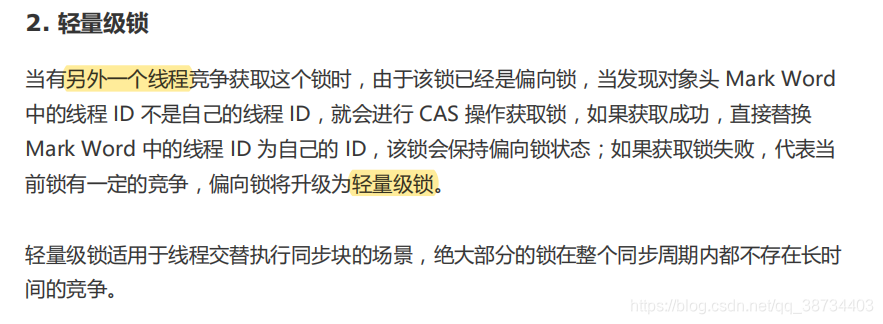
-XX:+UseHeavyMonitors // 设置重量级锁 - 2)轻量级锁
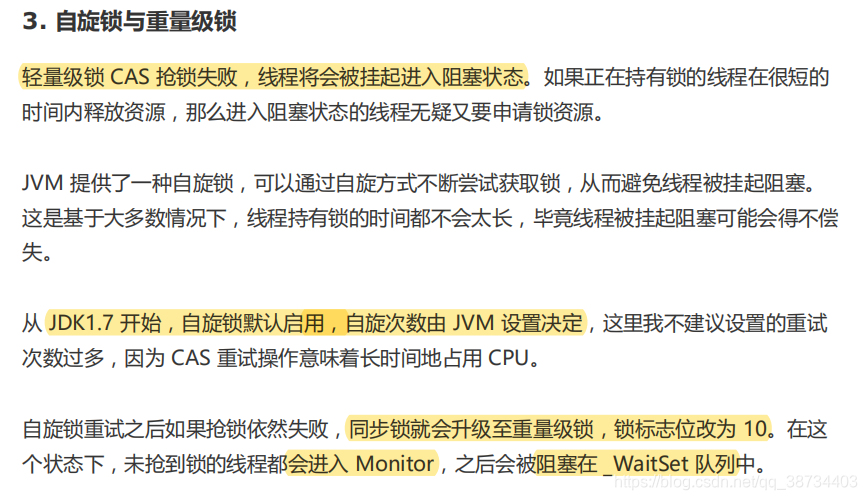
- 3)重量级锁
其他锁优化
1)动态编译实现锁消除 / 锁粗化
除了锁升级优化,Java 还使用了编译器对锁进行优化。
--JIT 编译器在动态编译同步块的时候,借助了一种被称为逃逸分析的技术
--JIT 编译器在编译这个同步块的时候不会生成 synchronized 所表示的锁的申请与释放的机器码,即消除了锁的使用。
--JIT 编译器将会把这几个同步块合并为一个大的同步块,从而避免一个线程“反
复申请、释放同一个锁“所带来的性能开销。
2) 减小锁粒度
--将一个数组和队列对象拆成多个小对象,来降低锁竞争,提升并行
度。
--最经典的减小锁粒度的案例就是 JDK1.8 之前实现的 ConcurrentHashMap 版本。
--ConcurrentHashMap 就很很巧妙地使用了分段锁 Segment 来降低锁资源竞争。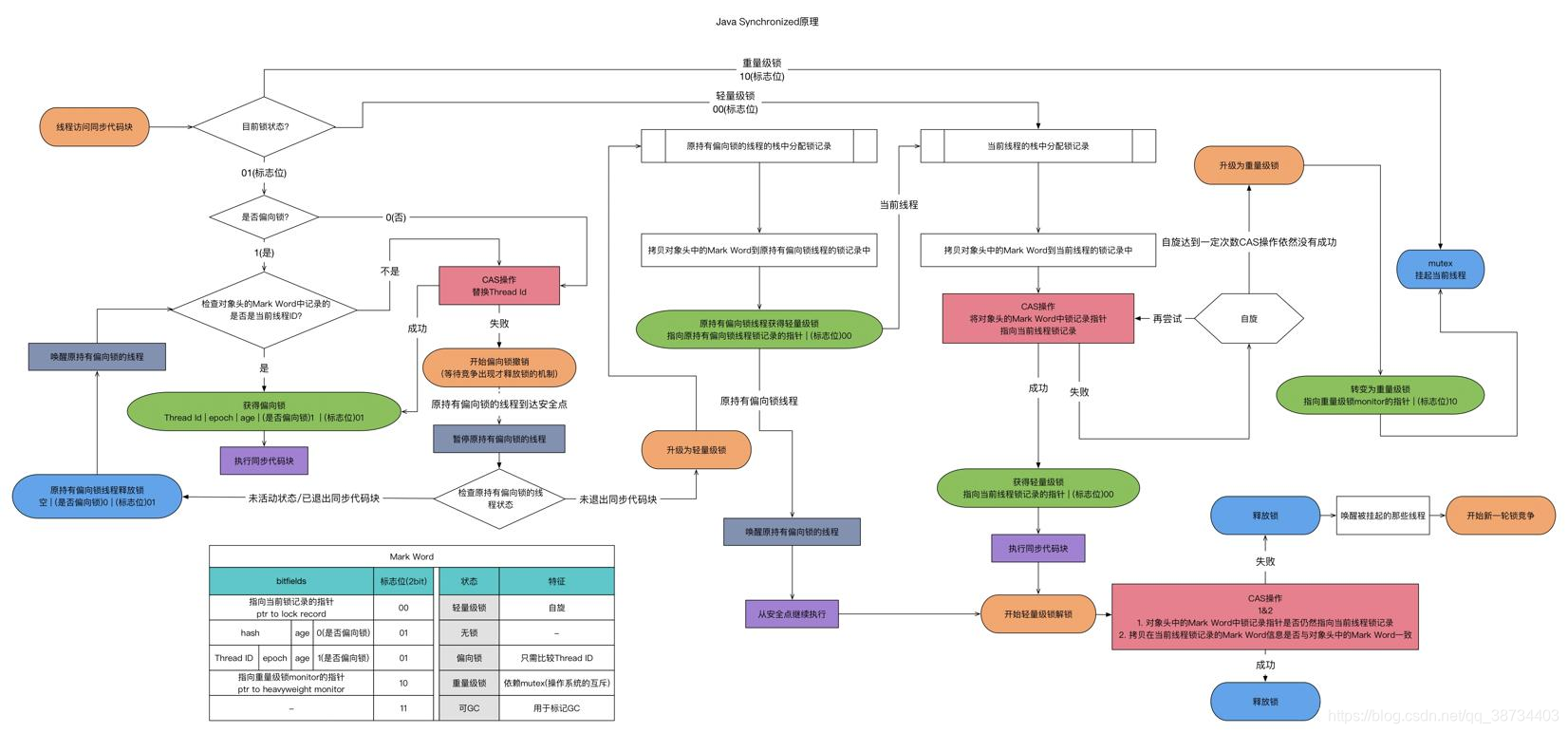


final
- final关键字
final、finally、finalize区别?
final
final修饰类,表示该类不可以被继承
final修饰变量,表示该变量不可以被修改,只允许赋值一次
final修饰方法,表示该方法不可以被重写
finally
finally是java保证代码一定要被执行的一种机制。
比如try-finally或try-catch-finally,用来关闭JDBC连接资源,用来解锁等等
finalize
finalize是Object的一个方法,它的目的是保证对象在被垃圾收集前完成特定资源的回收。- volatile和final的共同点
- 首先:对于一些需要快速读写的数据,可以从内存读取到CPU的寄存器中操作
- final 关键字声明的变量,会被CPU添加到寄存器中,读写都很快速
- volatile 它是被设计用来修饰被不同线程访问和修改的变量, 禁止把该变量放到CPU的寄存器中,防止多线程访问出现错乱问题
1、JMM保证final变量初始化时的有序性、禁止编译器和处理器重排序。
2、final作为不可变对象,正确初始化后(没有this逃逸),能够保障可见性。
3、volatile能够保障单次操作的原子性
4、volatile能够保障变量的可见性
锁机制
分布式锁
分布式锁一般有三种实现方式:1.数据库锁;2.基于Redis的分布式锁;3. 基于ZooKeeper的分布式锁。线程同步的方式?
① synchronized
② Condition
③ CountDownLatch、CyclicBarrierjava锁及实现
- volatile、synchronized、CAS
- 锁-是为了解决并发操作引起的脏读、数据不一致的问题。
https://www.jianshu.com/p/e674ee68fd3f
java锁机制
1) 所熟知的Java锁机制无非就是Sychornized 锁 和 Lock锁 (对象头知识,偏向锁,轻量级锁,重量级锁)- Lock 同步锁是基于 Java 实现的,而 Synchronized是基于底层操作系统的 Mutex Lock实现的,每次获取和释放锁操作都会带来用户态和内核态的切换,从而增加系统性能开销。
https://www.jianshu.com/p/e674ee68fd3f
2) 在 Java 多线程编程当中,提供了多种实现 Java 线程安全的方式: - 最简单的方式,使用 Synchronization 关键字
- 使用 java.util.concurrent.atomic 包中的原子类,例如 AtomicInteger
- 使用 java.util.concurrent.locks 包中的锁
- 使用线程安全的集合 ConcurrentHashMap
- 使用 volatile 关键字,保证变量可见性(直接从内存读,而不是从线程 cache 读
https://www.cnblogs.com/theworld/p/12056452.html
https://www.jianshu.com/p/e674ee68fd3f
- Lock 同步锁是基于 Java 实现的,而 Synchronized是基于底层操作系统的 Mutex Lock实现的,每次获取和释放锁操作都会带来用户态和内核态的切换,从而增加系统性能开销。
都有什么锁?说说乐观锁悲观锁是什么,怎么实现,volatile关键字,CAS,AQS原理及实现。
1)锁的分类:- 公平锁、非公平锁
- 互斥锁、读写锁
- 乐观锁、悲观锁
synchronized,retreenLock, ReadWriteLock
4)CAS,AQS原理及实现
死锁
- 死锁编码及定位分析:
- 概念:死锁是指多个进程循环等待彼此占有的资源而无限期的僵持等待下去的局面。
即A使用A资源并等待使用B资源,B使用B资源并等待使用A资源 - 必要条件:互斥条件、不可抢占条件、占有且等待条件、循环等待条件
- 死锁处理:死锁的预防、死锁避免、死锁的检测与恢复三种方法。
详见:https://blog.csdn.net/zhang123bl/article/details/89850646 1)死锁是什么(sxt2)
1)产生死锁主要的原因
① 系统资源不足、② 进程运行推进的顺序不合适、③ 资源分配不当
2) 代码、class HoldLockThread implements Runnable{private String lockA;private String lockB;public HoldLockThread(String lockA, String lockB) {this.lockA = lockA;this.lockB = lockB;}@Overridepublic void run() {synchronized (lockA){System.out.println(Thread.currentThread().getName() + "\t 自己持有" + lockA + "\t 尝试获得" + lockB);try { TimeUnit.SECONDS.sleep(2); } catch (InterruptedException e) { e.printStackTrace(); }synchronized (lockB){System.out.println(Thread.currentThread().getName() + "\t 自己持有" + lockA + "\t 尝试获得" + lockB);}}}}public class DeadLockDemo {public static void main(String[] args) {String lockA = "lockA";String lockB = "lockB";new Thread(new HoldLockThread(lockA,lockB) ,"ThreadAAA").start();new Thread(new HoldLockThread(lockB,lockA) ,"ThreadBBB").start();}}
打印:
打印ThreadAAA 自己持有:lockA 尝试获得:lockBThreadBBB 自己持有:lockB 尝试获得:lockA
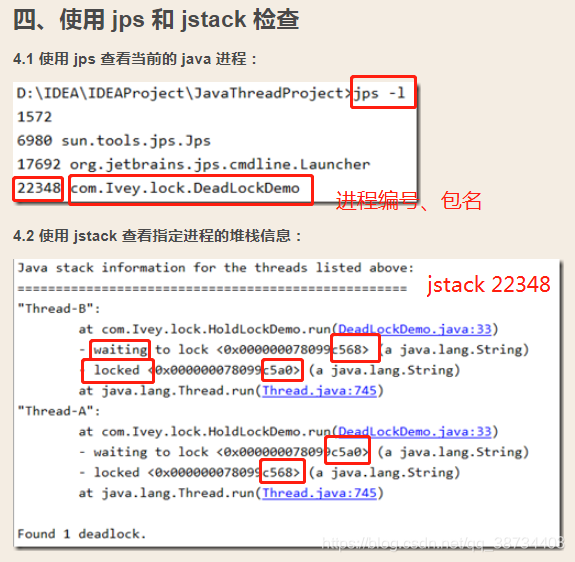
2)死锁怎么定位。
① jps 定位进程号
② jstack 找到死锁查看
linux ps -ef|grep XXxxxx ls -l
windows jps=java ps 只查看java jps -l
另:https://blog.csdn.net/zp357252539/article/details/104292521如何解决死锁
解决死锁问题的方法是:一种是用synchronized,一种是用Lock显式锁实现。
线程排查
1. 排查CPU占满的Java线程
产生CPU100%的原因:某一程序一直占用CPU是导致CPU100%的原因,大概有以下几种情况:
1)Java 内存不够或溢出导致GC overhead问题, GC overhead 导致的CPU 100%问题;
2)死循环问题. 如常见的HashMap被多个线程并发使用导致的死循环, 或者死循环;
3)某些操作一直占用CPU
步骤:
1)jps 获取Java**进程的PID。
2)top -Hp PID 查看对应进程的哪个线程**占用CPU过高。该进程内最耗费CPU的线程
3)echo "obase=16;PID" | bc 将线程的PID转换为16进制,大写转换为小写。
4)jstack pid >> java.txt 导出CPU占用高进程的线程栈
jstack 2444 >stack.txt或者jstack 进程id | grep 16进制线程id
在Java.txt中查找转换成为16进制的线程PID。找到对应的线程栈。
辅助
命令参考
grep "99b" stack.txt -A 25
grep -C 5 foo file 显示file文件里匹配foo字串那行以及上下5行
grep -B 5 foo file 显示foo及前5行
grep -A 5 foo file 显示foo及后5行
对线程状态进行分析。
新建( new )、可运行( runnable )、运行( running )、阻塞( block )、死亡( dead )
如何解决死锁
如何预防死锁?
- 死锁的产生
1)互斥,共享资源 X 和 Y 只能被一个线程占用;
2)占有且等待,线程 T1 已经取得共享资源 X,在等待共享资源 Y 的时候,不释放共享资源 X;
3)不可抢占,其他线程不能强行抢占线程 T1 占有的资源;
4)循环等待,线程 T1 等待线程 T2 占有的资源,线程 T2 等待线程 T1 占有的资源,就是循环等
待。 - 破坏死锁条件
1)对于“占用且等待”这个条件,我们可以一次性申请所有的资源,这样就不存在等待了。
2)对于“不可抢占”这个条件,占用部分资源的线程进一步申请其他资源时,如果申请不到,可以主动释放它占有的资源,这样不可抢占这个条件就破坏掉了。
3)对于“循环等待”这个条件,可以靠按序申请资源来预防。所谓按序申请,是指资源是有线性顺序的,申请的时候可以先申请资源序号小的,再申请资源序号大的,这样线性化后自然就不存在循环了。
- 死锁的产生
互斥、占有且等待、循环等待
- 1)循环等待问题:
破坏占用且等待条件的时,如果转出账本和转入账本不满足同时在文件架上这个条件,就用while死循环的方式来循环等待, - 2)循环等待问题的解决方案?
方案:如果线程要求的条件(转出账本和转入账本同在文件架上)不满足,则线程阻塞自己,进入等待状态;当线程要求的条件(转出账本和转入账本同在文件架上)满足后,通知等待的线程重新执行。其中,使用线程阻塞的方式就能避免循环等待消耗CPU的问题。 - 3)等待-通知机制
一个完整的等待-通知机制:线程首先获取互斥锁,当线程要求的条件不满足时,释放互斥锁,进入等待状态;当要求的条件满足时,通知等待的线程重新获取互斥锁。 - 4)如何用synchronized实现等待-通知机制?
Java语言里,等待-通知机制可以有多种实现方式,比如 Java 语言内置的 synchronized配合wait()、notify()、notifyAll()这三个方法就能轻松实现。 - 5)如何用synchronized实现互斥锁?
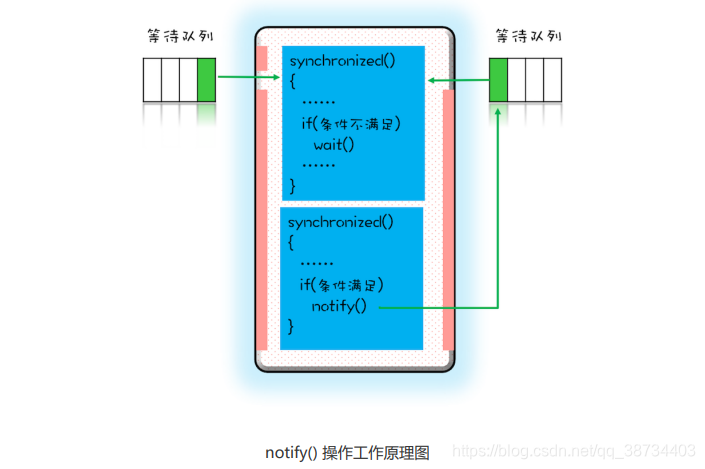
--在下面这个图里,左边有一个等待队列,同一时刻,只允许一个线程进入synchronized保护的临界区(这个临界区可以看作大夫的诊室),当有一个线程进入临界区后,其他线程就只能进入图中左边的等待队列里等待(相当于患者分诊等待)。这个等待队列和互斥锁是一对一的关系,每个互斥锁都有自己独立的等待队列。
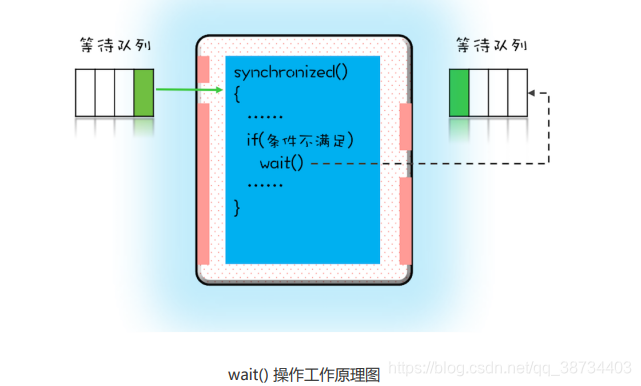
--在并发程序中,当一个线程进入临界区后,由于某些条件不满足,需要进入等待状态,Java 对象的 wait() 方法就能够满足这种需求。如上图所示,当调用 wait() 方法后,当前线程就会被阻塞,并且进入到右边的等待队列中,这个等待队列也是互斥锁的等待队列。线程在进入等待队列的同时,会释放持有的互斥锁,线程释放锁后,其他线程就有机会获得锁,并进入临界区了。
- 那线程要求的条件满足时,如何通知这个等待的线程呢?
就是 Java 对象的 notify()和notifyAll()方法。下图大致描述了这个过程,当条件满足时调用notify(),会通知等待队列(互斥锁的等待队列)中的线程,告诉它条件曾经满足过。
- 为什么说是曾经满足过呢?
注意:notify()只能保证在通知时间点,条件是满足的。而被通知线程的执行时间点和通知的时间点基本上不会重合,所以当线程执行的时候,很可能条件已经不满足了(保不齐有其他线程插队)。 - 还需注意:被通知的线程要想重新执行,仍然需要获取到互斥锁(因为曾经获取的锁在调用 wait() 时已经释放了)。
- 6)使用wait()、notify()、notifyAll()方法?
--synchronized 锁定的是this,那么对应的一定是this.wait()、this.notify()、this.notifyAll();
--synchronized 锁定的是target,那么对应的一定是target.wait()、target.notify()、target.notifyAll() 。
--wait()、notify()、notifyAll()这三个方法能够被调用的前提是已经获取了相应的互斥锁,所以我们会发现 wait()、notify()、notifyAll() 都是在
synchronized{}内部被调用的。如果在 synchronized{}外部调用,或者锁定的 this,而用target.wait() 调用的话,JVM 会抛出一个运行时异常:
java.lang.IllegalMonitorStateException。 - 7)尽量使用 notifyAll()?
--上述使用notifyAll()来实现通知机制,为什么不使用notify()呢?
--这二者是有区别的,notify() 是会随机地通知等待队列中的一个线程,而 notifyAll() 会通知等待队列中的所有线程。从感觉上来讲,应该是 notify() 更好一些,因为即便通知所有线程,也只有一个线程能够进入临界区。实际上使用notify()也很有风险,它的风险在于可能导致某些线程永远不会被通知到。
--假设我们有资源 A、B、C、D,线程 1 申请到了 AB,线程 2 申请到了 CD,此时线程 3 申请AB,会进入等待队列(AB 分配给线程 1,线程 3 要求的条件不满足),线程 4 申请 CD 也会进入等待队列。我们再假设之后线程 1 归还了资源 AB,如果使用notify()来通知等待队列中的线程,有可能被通知的是线程 4,但线程 4 申请的是 CD,所以此时线程 4 还是会继续等待,而真
正该唤醒的线程 3 就再也没有机会被唤醒了。
--所以除非经过深思熟虑,否则尽量使用 notifyAll()。
- 1)循环等待问题:
不可抢占
- Java SDK 并发包通过 Lock 和 Condition 两个接口来实现管程,其中 Lock 用于解决互斥问题,Condition 用于解决同步问题。
- Java 语言本身提供的 synchronized 也是管程的一种实现,既然 Java 从语言层面已经实现了管程了,那为什么还要在SDK里提供另外一种实现呢?
为解决的问题:
死锁问题中,破坏不可抢占条件方案,但是这个方案synchronized没有办法解决。原因是synchronized申请资源的时候,如果申请不到,线程直接进入阻塞状态了,而线程进入阻塞状态,也释放不了线程已经占有的资源。但我们希望的是:对于“不可抢占”这个条件,占用部分资源的线程进一步申请其他资源时,如果申请不到,可以主动释放它占有的资源,这样不可抢占这个条件就破坏掉了。
Java SDK 并发包里的Lock有别于synchronized隐式锁的三个特性:能够响应中断、支持超时和非阻塞地获取锁。
互斥锁lock三种方案:
1)能够响应中断。
synchronized 的问题是,持有锁 A 后,如果尝试获取锁B失败,那么线程就进入阻塞状态,一旦发生死锁,就没有任何机会来唤醒阻塞的线程。但如果阻塞状态的线程能够响应中断信号,也就是说当给阻塞的线程发送中断信号的时候,能够唤醒它,那它就有机会释放曾经持有的锁A。这样就破坏了不可抢占条件了。
2)支持超时。
如果线程在一段时间之内没有获取到锁,不是进入阻塞状态,而是返回一个错误,那这个线程也有机会释放曾经持有的锁。这样也能破坏不可抢占条件。
3)非阻塞地获取锁。如果尝试获取锁失败,并不进入阻塞状态,而是直接返回,那这个线程也有机会释放曾经持有的锁。这样也能破坏不可抢占条件。
--这三种方案可以全面弥补synchronized的问题。这三个方案体现在API上,就是 Lock 接口的三个方法。如下:// 支持中断的 APIvoid lockInterruptibly()throws InterruptedException;// 支持超时的 APIboolean tryLock(long time, TimeUnit unit)throws InterruptedException;// 支持非阻塞获取锁的 APIboolean tryLock();
如何保证可见性?
--Java SDK 里面 Lock 的使用,有一个经典的范例,就是try{}finally{}
,需要重点关注的是在finally里面释放锁。
--可见性是怎么保证的?
--- Java 里多线程的可见性是通过 Happens-Before 规则保证的,
--- synchronized 之所以能够保证可见性,也是因为有一条 synchronized相关的规则:synchronized 的解锁Happens-Before于后续对这个锁的加锁。
--- Java SDK 里面 Lock 靠什么保证可见性呢?例如在下面的代码中,线程 T1 对 value 进行了 +=1 操作,那后续的线程 T2 能够看到 value的正确结果吗?class X {private final Lock rtl = new ReentrantLock();int value;public void addOne() {// 获取锁rtl.lock();try {value+=1;} finally {// 保证锁能释放rtl.unlock();}}}
答案必须是肯定的。Java SDK里面锁原理简述:利用了 volatile 相关的 Happens-Before 规则。Java SDK 里面的ReentrantLock,内部持有一个 volatile 的成员变量 state,获取锁的时候,会读写 state 的值;解锁的时候,也会读写 state的值(简化后的代码如下面所示)。也就是说,在执行 value+=1
之前,程序先读写了一次 volatile 变量 state,在执行 value+=1 之后,又读写了一次 volatile变量 state。根据相关的 Happens-Before 规则:
1)顺序性规则:对于线程 T1,value+=1 Happens-Before 释放锁的操作 unlock();
2)volatile 变量规则:由于 state = 1 会先读取 state,所以线程 T1 的 unlock() 操作Happens-Before 线程 T2 的 lock() 操作;
3)传递性规则:线程 T2 的 lock() 操作 Happens-Before 线程 T1 的 value+=1 。class SampleLock {volatile int state;// 加锁lock() {// 省略代码无数state = 1;}// 解锁unlock() {// 省略代码无数state = 0;}}
所以说,后续线程 T2 能够看到 value 的正确结果
Condition
- Java SDK 并发包里的 Condition
--Condition实现了管程模型里面的条件变量。
--管程中提到 Java 语言内置的管程里只有一个条件变量,而 Lock&Condition实现的管程是支持多个条件变量的,这是二者的一个重要区别。
--很多并发场景下,支持多个条件变量能够让并发程序可读性更好,实现起来也更容易。
--例如,实现一个阻塞队列,就需要两个条件变量。 - 如何利用两个条件变量快速实现阻塞队列呢?
一个阻塞队列,需要两个条件变量,一个是队列不空(空队列不允许出队),另一个是队列不满(队列已满不允许入队)。相
关的代码,重新列出。
public class BlockedQueue<T>{final Lock lock = new ReentrantLock();// 条件变量:队列不满final Condition notFull = lock.newCondition();// 条件变量:队列不空final Condition notEmpty = lock.newCondition();// 入队void enq(T x) {lock.lock();try {while (队列已满){// 等待队列不满notFull.await();}// 省略入队操作...// 入队后, 通知可出队notEmpty.signal();}finally {lock.unlock();}}// 出队void deq(){lock.lock();try {while (队列已空){// 等待队列不空notEmpty.await();}// 省略出队操作...// 出队后,通知可入队notFull.signal();}finally {lock.unlock();}}}
注意:
-- Lock 和 Condition实现的管程,线程等待和通知需要调用await()、signal()、signalAll(),语义和wait()、notify()、notifyAll()是相同的。
-- 区别是,Lock&Condition实现的管程里只能使用前面的await()、signal()、signalAll(),而后面的wait()、notify()、notifyAll() 只有在 synchronized实现的管程里才能使用。
-- 如果一不小心在Lock&Condition实现的管程里调用了wait()、notify()、notifyAll(),那程序可就彻底玩儿完了。- Java SDK 并发包里的 Condition
线程生命周期
- os线程和Java线程_zejian
1 操作系统线程状态
1) 死锁,Deadlock(重点关注)
2) 执行中,Runnable
3) 等待资源,Waiting on condition(重点关注,等待什么资源)
4) 等待获取监视器,Waiting on monitor entry(重点关注)
5) 暂停,Suspended
6) 对象等待中,Object.wait() 或 TIMED_WAITING
7) 阻塞,Blocked(重点关注)
8) 停止,Parked
2 Java线程的状态
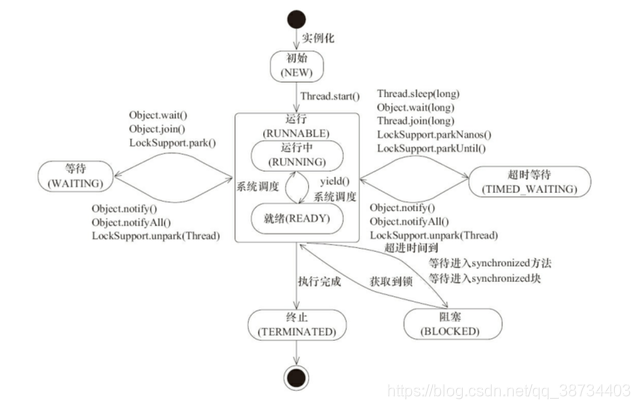
- Java语言中线程共有六种状态,分别是:
1)NEW(初始化状态)
2)RUNNABLE(可运行/运行状态)
3)BLOCKED(阻塞状态)
4)WAITING(无时限等待)
5)TIMED_WAITING(有时限等待)
6)TERMINATED(终止状态) 在操作系统层面,Java线程中的BLOCKED、WAITING、TIMED_WAITING是一种状态,即休眠状态。Java线程处于这三种状态之一,那么这个线程就永远没有CPU的使用权。
3线程的状态及转换方式
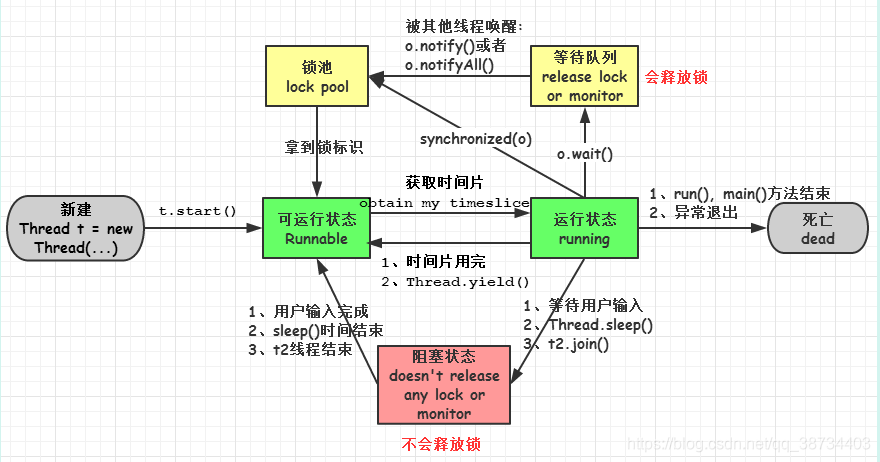
RUNNABLE与BLOCKED的状态转换
-- RUNNABLE转BLOCKED:一种场景会触发,线程等待synchronized的隐式锁。
-- BLOCKED转RUNNABLE:当等待的线程获得synchronized隐式锁时,就又会从BLOCKED转换到RUNNABLE状态。
RUNNABLE与WAITING的状态转换:3种场景会触发
① 获得synchronized隐式锁的线程,调用无参数的 Object.wait() 方法。
② 调用无参数的Thread.join()方法。
join()是一种线程同步方法,例如有一个线程对象threadA,当调用A.join()的时候,执行这条语句的线程会等待threadA执行完,而等待中的这个线程,其状态会从 RUNNABLE 转换到 WAITING。当线程 thread A 执行完,原来等待它的线程又会从 WAITING 状态转换到 RUNNABLE。
③ 调用 LockSupport.park() 方法。
调用LockSupport.park()方法,当前线程会阻塞,线程的状态会从 RUNNABLE 转换到 WAITING。调用 LockSupport.unpark(Thread thread) 可唤醒目标线程,目标线程的状态又会从 WAITING 状态转换到 RUNNABLE。
RUNNABLE与TIMED_WAITING的状态转换:5种场景会触发
① 调用带超时参数的 Thread.sleep(long millis) 方法;
② 获得synchronized隐式锁的线程,调用带超时参数的Object.wait(long timeout) 方法;
③ 调用带超时参数的 Thread.join(long millis) 方法;
④ 调用带超时参数的 LockSupport.parkNanos(Object blocker, long deadline) 方法;
⑤ 调用带超时参数的 LockSupport.parkUntil(long deadline) 方法。
NEW到RUNNABLE状态
Java刚创建出来的Thread对象就是NEW状态。
从NEW状态转换到RUNNABLE状态,只要调用线程对象的start()方法就可以
从RUNNABLE到TERMINATED状态
-- 线程执行完run()方法后,会自动转换到TERMINATED状态,当然如果执行run()方法的时候异常抛出,也会导致线程终止。
-- 强制中断run()方法的执行,调用 interrupt()方法。阻塞和等待的区别?
--定义+何时触发?
--BLOCKED:一个线程因为等待临界区的锁被阻塞产生的状态
--WAITING:一个线程进入了锁,但是需要等待其他线程执行某些操作。时间不确定- sleep和wait有什么区别?
--对于sleep()方法,我们首先要知道该方法是属于Thread类中的。而wait()方法,则是属于Object类中的。
Thread类的方法:sleep(),yield()等
Object的方法:wait()和notify()等
--sleep()方法导致了程序暂停执行指定的时间,让出cpu该其他线程,但是他的监控状态依然保持者,当指定的时间到了又会自动恢复运行状态。
在调用sleep()方法的过程中,线程不会释放对象锁。
---调用wait()方法的时候,线程会放弃对象锁,进入等待此对象的等待锁定池,只有针对此对象调用notify()方法后本线程才进入对象锁定池准备获取对象锁进入运行状态。 - 参考:https://www.cnblogs.com/hongten/p/hongten_java_sleep_wait.html
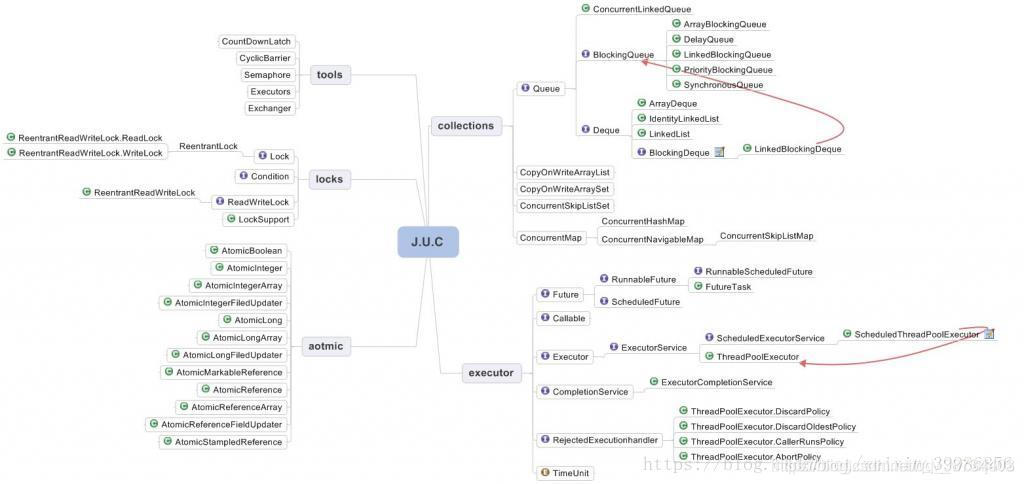
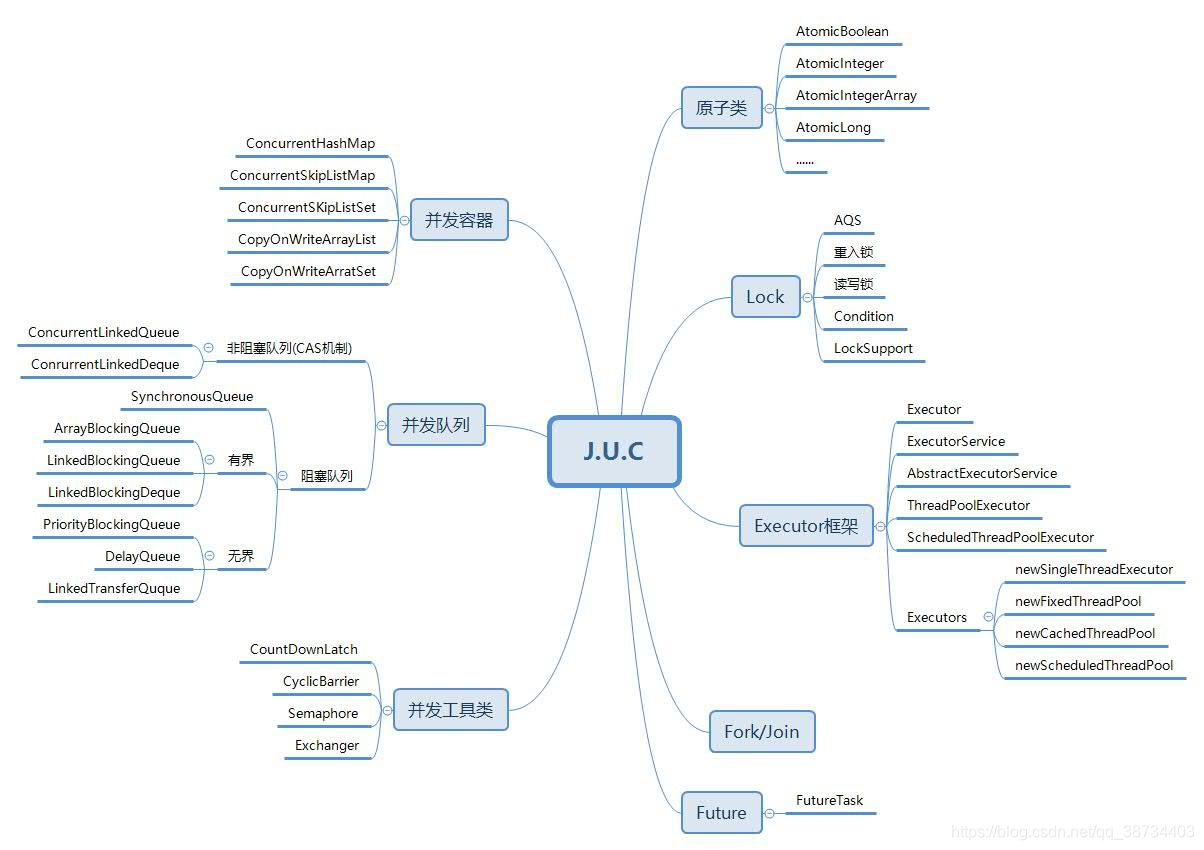
JUC
- 1 JUC概念
--Java5提供java.util.concurrent在并发编程中使用的工具类。
--作用:用于定义类似于线程的自定义子系统,包括线程池,异步IO和轻量级任务框架
--还提供了设计用于多线程上下文中的 Collection 实现等;
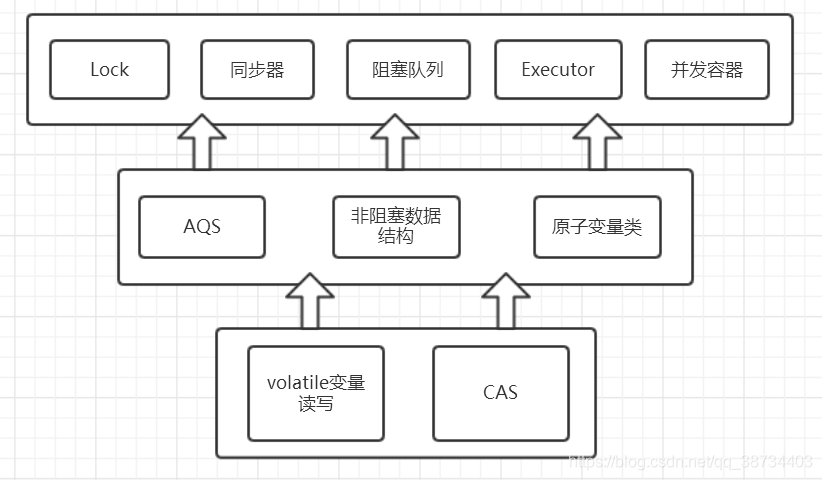
- 2 JUC下的组件
- 3 JUC下的automic包
- jdk1.8的并发包来说,底层基本上就是通过Usafe和CAS机制来实现的。
https://baijiahao.baidu.com/s?id=1647621616629561468&wfr=spider&for=pc
synchronized和lock的区别
- 1 Lock&Condition
Java SDK 并发包通过Lock和Condition两个接口来实现管程,其中 Lock用于解决互斥问题,Condition用于解决同步问题。 - 2 synchronized和lock有什么区别?用新的lock有什么好处?举例说明(sxt2)
1、原始构成
--synchronized 是关键字属于 JVM 层面,monitorenter(底层是通过 monitor 对象来完成, 其实 wait/notify 等方法也依赖于 monitor 对象只有在同步块或方法中才能调 wait/notify 等方法)monitorexit
--Lock是具体类(java.util.concurrent.locks.Lock)是api层面的锁
2、使用方法
--synchronized 不需要用户去手动释放锁,当 synchronized 代码执行完后系统会自动让线程释放对锁的占用
--ReentrantLock 则需要用户去手动释放锁若没有主动释放锁,就有可能导致出现死锁现象。
需要 lock() 和 unlock() 方法配合 try / finally 语句块来完成。
3、等待是否可中断
--synchronized 不可中断,除非抛出异常或者正常运行完成
--ReentrantLock 可中断
① 设置超时方法 tryLock(long timeout, TimeUnit unit)
② lockInterruptibly() 放代码块这,调用 interrupt() 方法可中断
4、加锁是否公平
--synchronized 非公平锁
--ReentrantLock 两者都可以,默认非公平锁,构造方法可以传入 boolean 值,true 为公平锁,false 为非公平锁
5、锁绑定多个条件 Condition
--synchronized 没有
--ReentrantLock 用来实现分组唤醒需要唤醒的线程们,可以精确唤醒,而不是像synchronized要么随机唤醒一个线程要么唤醒全部线程。
代码
Object 的wait()/notify()/notifyAll() 的用法
Condition的 await()、signal()、signalAll()
- lock怎么知道有没有拿到锁?
乐观锁悲观锁
- 1 概念
加锁是一种悲观策略,无锁是一种乐观策略;
1)悲观锁:
--概念:总是假设最坏的情况,每次去拿数据的时候都认为别人会修改,所以每次在拿数据的时候都会上锁,这样别人想拿这个数据就会阻塞直到它拿到锁。
--应用:传统的关系型数据库里,如行锁,表锁等,读锁,写锁等;Java同步原语synchronized关键字的实现;
2)乐观锁
--概念:假设每次去拿数据的时候都认为别人不会修改,所以不会上锁,线程可以不停执行,无需加锁,无需等待,但是在更新的时候会判断一下在此期间别人有没有去更新这个数据,可以使用版本号等机制。
无锁则总是假设对共享资源的访问没有冲突,线程可以不停执行,无需加锁,无需等待,一旦发现冲突,无锁策略则采用一种称为CAS的技术来保证线程执行的安全性。
--应用:乐观锁适用于多读的应用类型,这样可以提高吞吐量,像数据库提供的类似于 write_condition 机制,其实都是提供的乐观锁。Java中 java.util.concurrent.atomic 包下面的原子变量类就是使用了乐观锁的一种实现方式 CAS 实现的。
--实现:版本号或者CAS2种方法 - 3 应用场景
悲观锁和乐观锁是数据库用来保证数据并发安全防止更新丢失的两种方法
乐观锁:适合读操作比较频繁的场景
如果出现大量的写入操作,数据发生冲突的可能性就会增大,为了保证数据的一致性,应用层需要不断的重新获取数据,这样会增加大量的查询操作,降低了系统的吞吐量。
悲观锁:适合写操作比较频繁的场景
如果出现大量的读取操作,每次读取的时候都会进行加锁,这样会增加大量的锁的开销,降低了系统的吞吐量。
CAS + Atomic
- 原子类_zejian
- 汇编底层
- 常见问题
会问:CAS -> Unsafe > CAS底层 -> ABA -> 原子引用更新 -> 如何规避ABA - 讲一讲AtomicInteger,为什么要用CAS而不是syschronized?
回答即可:① 底层原理:自旋锁;② Unsafe类(Unsafe类+CAS思想,即自旋)
syschronized一个时间段只允许一个线程访问,保证了一致性,并发性下降;CAS中的do-while没有加锁,可以反复的通过CAS比较,知道成功,既保证一致性,又提高了并发性。 1 CAS
1)CAS是什么
--概念:CAS 的全称 Compare-And-Swap即比较交换。它是一条 CPU 并发原语。
--功能:是判断内存某一个位置的值是否为预期,如果是则更改这个值,这个过程就是原子的。
--核心思想:执行函数:CAS(V,E,N)
3个参数:V表示要更新的变量,E表示预期值,N表示新值
如CAS(1,1,3)=> 1=1,则将1置为3
--CAS 并发原语现在 JAVA 语言中就是 sun.misc.Unsafe 类中的各个方法。调用 UnSafe 类中的 CAS 方法,JVM 会帮我们实现出 CAS 汇编指令。这是一种完全依赖硬件的功能,通过它实现了原子操作。由于 CAS 是一种系统原语,原语属于操作系统用语范畴,是由若干条指令组成,用于完成某一个功能的过程,并且原语的执行必须是连续的,在执行的过程中不允许被中断,也就是说 CAS 是一条原子指令,不会造成所谓的数据不一致的问题。(即线程安全)
2)UnSafe:JVM的原始类,部分属性方法native修饰
--Unsafe 是 CAS 的核心类,由于 Java 方法无法直接访问底层系统,而需要通过本地(native)方法来访问, Unsafe 类相当一个后门,基于该类可以直接操作特定内存的数据。Unsafe 类存在于 sun.misc 包中,其内部方法操作可以像 C 指针一样直接操作内存,因为 Java 中 CAS 操作执行依赖于 Unsafe 类。
--变量 vauleOffset,表示该变量值在内存中的偏移量,因为 Unsafe 就是根据内存偏移量来获取数据原值的。
--变量 value 用 volatile 修饰,保证了多线程之间的内存可见性,value是同一份。
--Unsafe类中的compareAndSwapInt,是一个本地方法,实现位于unsafe.cpp中。
2.1)Unsafe类一些属性、方法:
--类和实例对象以及变量的操作://获得给定对象的指定偏移量offset的int值,使用volatile语义,总能获取到最新的int值。public native int getIntVolatile(Object o, long offset);
--Unsafe类中CAS 操作相关:
Java中无锁操作CAS基于以下3个方法实现,在Atomic系列内部方法是基于下述方法的实现的。//第一个参数o为给定对象,offset为对象内存的偏移量,通过这个偏移量迅速定位字段并设置或获取该字段的值,//expected表示期望值,x表示要设置的值,下面3个方法都通过CAS原子指令执行操作。public final native boolean compareAndSwapObject(Object o, long offset,Object expected, Object x);public final native boolean compareAndSwapInt(Object o, long offset,int expected,int x);public final native boolean compareAndSwapLong(Object o, long offset,long expected,long x);
--指针类Unsafe类中JDK 1.8新增的几个方法,它们的实现是基于上述的CAS方法 int型为例 非native
//1.8新增,给定对象o,根据获取内存偏移量指向的字段,将其增加delta,//这是一个CAS操作过程,直到设置成功方能退出循环,返回旧值public final int getAndAddInt(Object o, long offset, int delta) {int v;do {//获取内存中最新值v = getIntVolatile(o, offset);//通过CAS操作} while (!compareAndSwapInt(o, offset, v, v + delta));return v;}//1.8新增,方法作用同上,只不过这里操作的long类型数据public final long getAndAddLong(Object o, long offset, long delta) {...}//1.8新增,给定对象o,根据获取内存偏移量对于字段,将其 设置为新值newValue,//这是一个CAS操作过程,直到设置成功方能退出循环,返回旧值public final int getAndSetInt(Object o, long offset, int newValue) {int v;do {v = getIntVolatile(o, offset);} while (!compareAndSwapInt(o, offset, v, newValue));return v;}// 1.8新增,同上,操作的是long类型public final long getAndSetLong(Object o, long offset, long newValue) {...}//1.8新增,同上,操作的是引用类型数据public final Object getAndSetObject(Object o, long offset, Object newValue) {...}
--挂起与恢复(park unpark os 线程挂起)
--内存屏障(这个volitile有用到)2 Atomic
并发包中的原子操作类(Atomic系列),从JDK 1.5开始提供了java.util.concurrent.atomic包,在该包中提供了许多基于CAS实现的原子操作类原子更新基本类型
1)3个基本类型
AtomicBoolean:原子更新布尔类型
AtomicInteger:原子更新整型
AtomicLong:原子更新长整型
这3个类的实现原理和使用方式几乎是一样的,这里我们以AtomicInteger为例进行分析
2)AtomicIntegerpublic class AtomicInteger extends Number implements java.io.Serializable {...// 获取指针类Unsafeprivate static final Unsafe unsafe = Unsafe.getUnsafe();//下述变量value在AtomicInteger实例对象内的内存偏移量private static final long valueOffset;static {try {//通过unsafe类的objectFieldOffset()方法,获取value变量在对象内存中的偏移//通过该偏移量valueOffset,unsafe类的内部方法可以获取到变量value对其进行取值或赋值操作valueOffset = unsafe.objectFieldOffset(AtomicInteger.class.getDeclaredField("value"));} catch (Exception ex) { throw new Error(ex); }}//当前AtomicInteger封装的int变量valueprivate volatile int value;...//当前值加1,返回新值,底层CAS操作public final int incrementAndGet() {return unsafe.getAndAddInt(this, valueOffset, 1) + 1;}...}
--重点分析自增操作方法实现过程,其他方法自增实现原理一样。
--发现AtomicInteger类中所有自增或自减的方法都间接调用Unsafe类中的getAndAddInt()方法实现了CAS操作,从而保证了线程安全,关于getAndAddInt,是Unsafe类中1.8新增的方法,源码如下//Unsafe类中的getAndAddInt方法public final int getAndAddInt(Object o, long offset, int delta) {int v;do {v = getIntVolatile(o, offset);} while (!compareAndSwapInt(o, offset, v, v + delta));return v;}
--getAndAddInt通过一个while循环不断的重试更新要设置的值,直到成功为止,调用的是Unsafe类中的compareAndSwapInt方法,是一个CAS操作方法。注意的是,上述源码分析是基于JDK1.8的,如果是1.8之前的方法,AtomicInteger源码实现有所不同,是基于for死循环的,如下
//JDK 1.7的源码,由for的死循环实现,并且直接在AtomicInteger实现该方法,//JDK1.8后,该方法实现已移动到Unsafe类中,直接调用getAndAddInt方法即可public final int incrementAndGet() {for (;;) {int current = get();int next = current + 1;if (compareAndSet(current, next))return next;}}
① atomicInteger.getAndIncreament:解决i++线程安全问题
--方法调用的 unsafe.getAndAddInt(this,valueoffset,1)
this:当前对象
valueoffset:内存偏移量,即内存地址
getAndAddInt:在unsafe类,实现使用了先获取当前地址值getIntVolatile,再比较交换compareAndSwapInt,没得到正确值会一直CAS3 原子更新引用-AtomicReference
AtomicReference原子类,即原子更新引用类型。
AtomicReference原子类内部是如何实现CAS操作的呢?
-- AtomicReference与AtomicInteger的实现原理基本是一样的,最终执行的还是Unsafe类,关于AtomicReference的其他方法也是一样的public class AtomicReference<V> implements java.io.Serializable {private static final Unsafe unsafe = Unsafe.getUnsafe();private static final long valueOffset;static {try {valueOffset = unsafe.objectFieldOffset(AtomicReference.class.getDeclaredField("value"));} catch (Exception ex) { throw new Error(ex); }}//内部变量value,Unsafe类通过valueOffset内存偏移量即可获取该变量private volatile V value;//CAS方法,间接调用unsafe.compareAndSwapObject(),它是一个//实现了CAS操作的native方法public final boolean compareAndSet(V expect, V update) {return unsafe.compareAndSwapObject(this, valueOffset, expect, update);}//设置并获取旧值public final V getAndSet(V newValue) {return (V)unsafe.getAndSetObject(this, valueOffset, newValue);}//省略其他代码......}//Unsafe类中的getAndSetObject方法,实际调用还是CAS操作public final Object getAndSetObject(Object o, long offset, Object newValue) {Object v;do {v = getObjectVolatile(o, offset);} while (!compareAndSwapObject(o, offset, v, newValue));return v;}
4 CAS缺点
代码如下:public final int getAndAddInt(Object var1, long var2, int var4) {int var5;do {var5 = this.getIntVolatile(var1, var2);} while(!this.compareAndSwapInt(var1, var2, var5, var5 + var4));return var5;}
1)循环时间长开销很大:
有个do-while,CAS失败会一直尝试,会给CPU带来很大开销,效率低于 synchronized
2)只能保证一个共享变量的原子操作
多共享变量,循环CAS会破坏原子性,只能加锁
3)ABA问题5 ABA问题解决
原子类AtomicInterger的ABA问题?原子更新引用知道吗?
1)CAS会导致ABA问题
--CAS算法实现一个重要前提需要取出内存中某时刻的数据并在当下时刻比较并替换,那么在这个时间差类会导致数据的变化。
--示例:(一个慢取出后挂起,快的已经更改了值,慢的再用原来的值更改)
有线程one,two两个线程,one线程较慢需要十秒钟,two线程较快尽需两秒,
一个线程one从内存位置中取出A,这时候另一个线程two也从内存中取出A,并且线程two进行了一些操作将值变成了B,然后线程内有一些其他操作two又将V位置的数据变成A,这时候线程one进行CAS操作发现内存中仍然是A,然后线程one操作成功。
--尽管线程one的CAS操作成功,但是不代表这个过程就是没有问题的。因为one得到的这个内存中的值已经发生了许多问题.
2)原子引用:AotmicReference类AotmicReference<User> aotmicReference = new AotmicReference<>();aotmicReference.set();aotmicReference.compareAndSet();
3)时间戳原子引用
- 新增一种修改版本号的机制(类似时间戳)
4)问题解决 AtomicStampedReference类,boolean
atomicStampedReference=new AtomicStampedReference<>(值,时间戳-版本号)atomicStampedReference.compareAndSet(现值,期望值,期望版本号,新版本号)
AtomicStampedReference
--概念:
一个带有时间戳的对象引用,在每次修改后,AtomicStampedReference不仅会设置新值而且还会记录更改的时间。当AtomicStampedReference设置对象值时,对象值以及时间戳都必须满足期望值才能写入成功。
--内部实现思想:
通过一个键值对Pair存储数据和时间戳,在更新时对数据和时间戳进行比较,只有两者都符合预期才会调用Unsafe的compareAndSwapObject方法执行数值和时间戳替换,也就避免了ABA的问题。
--内部实现原理:public class AtomicStampedReference<V> {//通过Pair内部类存储数据和时间戳private static class Pair<T> {final T reference;final int stamp;private Pair(T reference, int stamp) {this.reference = reference;this.stamp = stamp;}static <T> Pair<T> of(T reference, int stamp) {return new Pair<T>(reference, stamp);}}//存储数值和时间的内部类private volatile Pair<V> pair;//构造器,创建时需传入初始值和时间初始值public AtomicStampedReference(V initialRef, int initialStamp) {pair = Pair.of(initialRef, initialStamp);}}...// 接着看看其compareAndSet方法的实现public boolean compareAndSet(V expectedReference,V newReference,int expectedStamp,int newStamp) {Pair<V> current = pair;returnexpectedReference == current.reference &&expectedStamp == current.stamp &&((newReference == current.reference &&newStamp == current.stamp) ||casPair(current, Pair.of(newReference, newStamp)));}
看下casPair():
同时对当前数据和当前时间进行比较,只有两者都相等是才会执行casPair()方法,单从该方法的名称就可知是一个CAS方法,最终调用的还是Unsafe类中的compareAndSwapObject方法:private boolean casPair(Pair<V> cmp, Pair<V> val) {return UNSAFE.compareAndSwapObject(this, pairOffset, cmp, val);}
从 Java1.5 开始 JDK 的 atomic包里提供了一个类 AtomicStampedReference 来解决 ABA 问题。
自旋锁
- 自旋锁_zj
- 是什么(sxt2)
自旋锁(spinlock):尝试获取锁的线程不会立即阻塞,而是采取循环的方式去获取锁,这样的好处是减少线程上下文切换的消耗,缺点是循环会消耗CPU。(阻塞的反义自旋)
--概念:自旋锁是一种假设在不久将来,当前的线程可以获得锁,因此虚拟机会让当前想要获取锁的线程做几个空循环(这也是称为自旋的原因),在经过若干次循环后,如果得到锁,就顺利进入临界区。如果还不能获得锁,那就会将线程在操作系统层面挂起,这种方式确实也是可以提升效率的。
--问题:当线程越来越多竞争很激烈时,占用CPU的时间变长会导致性能急剧下降,因此Java虚拟机内部一般对于自旋锁有一定的次数限制,可能是50或者100次循环后就放弃,直接挂起线程,让出CPU资源。 手写一个自旋锁(sxt2) AtomicReference实现
import java.util.concurrent.TimeUnit;import java.util.concurrent.atomic.AtomicReference;/*** 题目:实现一个自旋锁* 自旋锁好处:循环比较获取直至成功为止,没有类似wait的阻塞。** 通过CAS操作完成自旋锁,A线程先进来调用myLock方法,自己持有5秒钟,* B随后进来后发现,当前线程持有锁,不是null,* 所以只能通过自旋等待,直到A释放锁后B随后抢到。*/public class SpinLockDemo {// 原子引用线程AtomicReference<Thread> atomicReference = new AtomicReference<>();public void myLock(){Thread thread = Thread.currentThread(); // 当前进来的线程System.out.println(thread.getName() + "\t come in!");while(!atomicReference.compareAndSet(null,thread)){//期望值,现值为null,当前线程进去}}// 解锁public void myUnlock(){Thread thread = Thread.currentThread();atomicReference.compareAndSet(thread,null); // 用完,设置为nullSystem.out.println(thread.getName() + "\t invoked myUnlock()");}public static void main(String[] args) {SpinLockDemo spinLockDemo = new SpinLockDemo();new Thread(()->{spinLockDemo.myLock();// 暂停一会线程try {TimeUnit.SECONDS.sleep(5);} catch (InterruptedException e) {e.printStackTrace();}spinLockDemo.myUnlock();},"AA").start();// 保证A先启动try {TimeUnit.SECONDS.sleep(1);} catch (InterruptedException e) {e.printStackTrace();}new Thread(()->{spinLockDemo.myLock();spinLockDemo.myUnlock();},"BB").start();}}
- 说说自旋锁咋实现的
1)概念
自旋锁(spinlock):是指当一个线程在获取锁的时候,如果锁已经被其它线程获取,那么该线程将循环等待,然后不断的判断锁是否能够被成功获取,直到获取到锁才会退出循环。
2)存在的问题
① 如果某个线程持有锁的时间过长,就会导致其它等待获取锁的线程进入循环等待,消耗CPU。使用不当会造成CPU使用率极高。
② 上面Java实现的自旋锁不是公平的,即无法满足等待时间最长的线程优先获取锁。不公平的锁就会存在“线程饥饿”问题。
3)优点
① 自旋锁不会使线程状态发生切换,一直处于用户态,即线程一直都是active的;不会使线程进入阻塞状态,减少了不必要的上下文切换,执行速度快。
3)例子
ublic class SpinLock {private AtomicReference cas = new AtomicReference();public void lock() {Thread current = Thread.currentThread();// 利用CASwhile (!cas.compareAndSet(null, current)) {// DO nothing}}public void unlock() {Thread current = Thread.currentThread();cas.compareAndSet(current, null);}}
lock()方法利用的CAS,当第一个线程A获取锁的时候,能够成功获取到,不会进入while循环,如果此时线程A没有释放锁,另一个线程B又来获取锁,此时由于不满足CAS,所以就会进入while循环,不断判断是否满足CAS,直到A线程调用unlock方法释放了该锁。
https://www.jianshu.com/p/9d3660ad4358
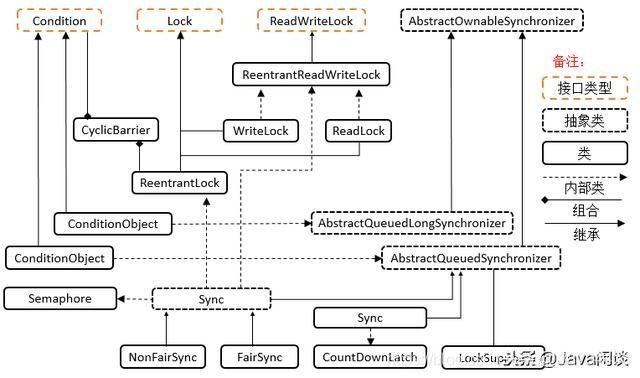
AQS(AbstractQueuedSynchronizer) ★
- AQS_zejian|
- unlock()操作必须在finally代码块中确保即使临界区执行抛出异常,线程最终也能正常释放锁
可重入锁
- Lock为接口,ReentrantLock是Lock的实现类
- 又名递归锁,ReentrantLock/Synchronized就是一个典型的可重入锁。
- 最大作用:避免死锁
可重入锁概念:
-- ReentrantLock翻译叫可重入锁。所谓可重入锁,顾名思义,指的是线程可以重复获取同一把锁。
-- 同一个线程外层函数获得锁之后,内层递归函数仍然能够获取该锁的代码,在同一个线程在外层方法获取锁的时候,在进入内层方法会自动获取锁
-- 如下代码,当线程 T1 执行到 ①处时,已经获取到了锁 rtl ,当在 ① 处调用get() 方法时,会在 ② 再次对锁 rtl执行加锁操作。
此时,如果锁 rtl 是可重入的,那么线程T1可以再次加锁成功;如果锁 rtl 是不可重入的,那么线程 T1 此时会被阻塞。class X {private final Lock rtl = new ReentrantLock();int value;public int get() {// 获取锁rtl.lock(); ②try {return value;} finally {// 保证锁能释放rtl.unlock();}}public void addOne() {// 获取锁rtl.lock();try {value = 1 + get(); ①} finally {// 保证锁能释放rtl.unlock();}}}
- 可重入函数
指的是多个线程可以同时调用该函数,每个线程都能得到正确结果;同时在一个线程内支持线程切换,无论被切换多少次,结果都是正确的。多线程可以同时执行,还支持线程切换,这意味着什么呢?线程安全啊。所以,可重入函数是线程安全的。
AQS
- RL_zejian|
- AQS原理及实现?
- 类在java.util.concurrent.locks包下面
- 概念
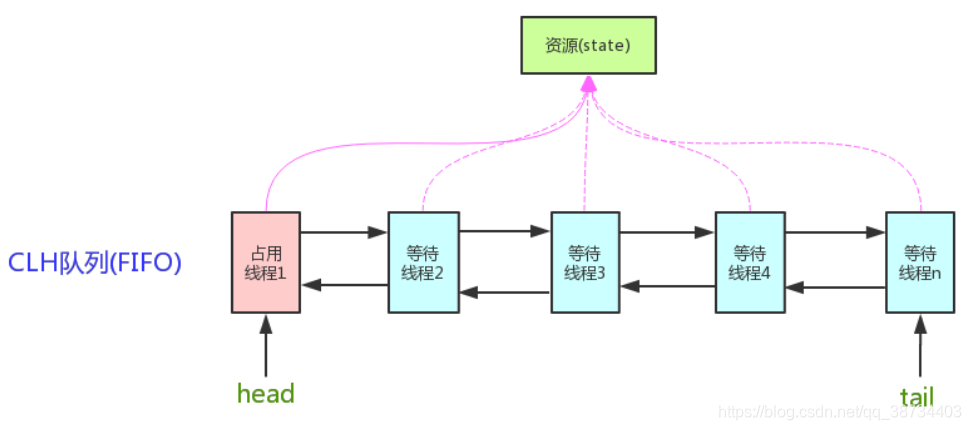
AQS是一个用来构建锁和同步器的框架,使用AQS能简单且高效地构造出应用广泛的大量的同步器,比如我们提到的ReentrantLock,Semaphore,其他的诸如ReentrantReadWriteLock,SynchronousQueue,FutureTask等等皆是基于AQS的。当然,我们自己也能利用AQS非常轻松容易地构造出符合我们自己需求的同步器。 - AQS核心思想是,如果被请求的共享资源空闲,则将当前请求资源的线程设置为有效的工作线程,并且将共享资源设置为锁定状态。如果被请求的共享资源被占用,那么就需要一套线程阻塞等待以及被唤醒时锁分配的机制,这个机制AQS是用CLH队列锁实现的,即将暂时获取不到锁的线程加入到队列中。
- AQS 对资源的共享方式
AQS定义两种资源共享方式
① Exclusive(独占):只有一个线程能执行,如ReentrantLock。又可分为公平锁和非公平锁:
*公平锁:按照线程在队列中的排队顺序,先到者先拿到锁
*非公平锁:当线程要获取锁时,无视队列顺序直接去抢锁,谁抢到就是谁的
② Share(共享):多个线程可同时执行,如Semaphore/CountDownLatch。Semaphore、CountDownLatch、 CyclicBarrier、ReadWriteLock 我们都会在后面讲到。
ReentrantReadWriteLock 可以看成是组合式,因为ReentrantReadWriteLock也就是读写锁允许多个线程同时对某一资源进行读。
不同的自定义同步器争用共享资源的方式也不同。自定义同步器在实现时只需要实现共享资源 state 的获取与释放方式即可,至于具体线程等待队列的维护(如获取资源失败入队/唤醒出队等),AQS已经在顶层实现好了。 AQS底层使用了模板方法模式
同步器的设计是基于模板方法模式的,如果需要自定义同步器一般的方式是这样(模板方法模式很经典的一个应用):
使用者继承AbstractQueuedSynchronizer并重写指定的方法。(这些重写方法很简单,无非是对于共享资源state的获取和释放)
将AQS组合在自定义同步组件的实现中,并调用其模板方法,而这些模板方法会调用使用者重写的方法。
这和我们以往通过实现接口的方式有很大区别,这是模板方法模式很经典的一个运用。
AQS使用了模板方法模式,自定义同步器时需要重写下面几个AQS提供的模板方法:isHeldExclusively()//该线程是否正在独占资源。只有用到condition才需要去实现它。tryAcquire(int)//独占方式。尝试获取资源,成功则返回true,失败则返回false。tryRelease(int)//独占方式。尝试释放资源,成功则返回true,失败则返回false。tryAcquireShared(int)//共享方式。尝试获取资源。负数表示失败;0表示成功,但没有剩余可用资源;正数表示成功,且有剩余资源。tryReleaseShared(int)//共享方式。尝试释放资源,成功则返回true,失败则返回false。
默认情况下,每个方法都抛出 UnsupportedOperationException。 这些方法的实现必须是内部线程安全的,并且通常应该简短而不是阻塞。AQS类中的其他方法都是final ,所以无法被其他类使用,只有这几个方法可以被其他类使用。
*以ReentrantLock为例,state初始化为0,表示未锁定状态。A线程lock()时,会调用tryAcquire()独占该锁并将state+1。此后,其他线程再tryAcquire()时就会失败,直到A线程unlock()到state=0(即释放锁)为止,其它线程才有机会获取该锁。当然,释放锁之前,A线程自己是可以重复获取此锁的(state会累加),这就是可重入的概念。但要注意,获取多少次就要释放多么次,这样才能保证state是能回到零态的。
*再以CountDownLatch以例,任务分为N个子线程去执行,state也初始化为N(注意N要与线程个数一致)。这N个子线程是并行执行的,每个子线程执行完后countDown()一次,state会CAS(Compare and Swap)减1。等到所有子线程都执行完后(即state=0),会unpark()主调用线程,然后主调用线程就会从await()函数返回,继续后余动作。
*一般来说,自定义同步器要么是独占方法,要么是共享方式,他们也只需实现tryAcquire-tryRelease、tryAcquireShared-tryReleaseShared中的一种即可。但AQS也支持自定义同步器同时实现独占和共享两种方式,如ReentrantReadWriteLock。-----------------------------具体-------------------
AQS的原理概要,如下源码- 1 AQS工作原理概要
--概念:AbstractQueuedSynchronizer(AQS)又称为队列同步器;
--作用:用来构建锁或其他同步组件的基础框架;
--state:内部通过一个int类型的成员变量state来控制同步状态:
① 当state=0,则说明没有任何线程占有共享资源的锁;
② 当state=1,则说明有线程目前正在使用共享变量,其他线程必须加入同步队列进行等待;
--同步队列:AQS内部通过内部类Node构成FIFO的同步队列来完成线程获取锁的排队工作;
--等待队列:AQS同时利用内部类ConditionObject构建等待队列,当Condition调用await()方法后,线程将会加入等待队列中,而当Condition调用signal()方法后,线程将从等待队列转移动同步队列中进行锁竞争。
注意:这里涉及到两种队列,一种的同步队列,当线程请求锁而等待后将加入同步队列等待,而另一种则是等待队列(可有多个),通过Condition调用await()方法释放锁后,将加入等待队列。 2 AQS中的同步队列模型
1)AQS
--head和tail:分别是AQS中的变量。
head:指向同步队列的头部,注意head为空结点,不存储信息。
tail:指向同步队列的队尾,同步队列采用的是双向链表的结构这样可方便队列进行结点增删操作。
--state: state变量则是代表同步状态。
state=0:执行当线程调用lock方法进行加锁后,如果此时state的值为0,则说明当前线程可以获取到锁(在本篇文章中,锁和同步状态代表同一个意思),同时将state设置为1,表示获取成功。
state=1:如果state已为1,也就是当前锁已被其他线程持有,那么当前执行线程将被封装为Node结点加入同步队列等待。
--Node结点:是对每一个访问同步代码的线程的封装。/** AQS抽象类*/public abstract class AbstractQueuedSynchronizerextends AbstractOwnableSynchronizer{//指向同步队列队头private transient volatile Node head;//指向同步的队尾private transient volatile Node tail;//同步状态,0代表锁未被占用,1代表锁已被占用private volatile int state;//省略其他代码......}

2)Node节点
从图中的Node的数据结构也可看出,其包含了需要同步的线程本身以及线程的状态,如是否被阻塞,是否等待唤醒,是否已经被取消等。每个Node结点内部关联其前继结点prev和后继结点next,这样可以方便线程释放锁后快速唤醒下一个在等待的线程,Node是AQS的内部类,其数据结构如下:
-- SHARED(shared)和EXCLUSIVE(exclusive)常量:分别代表共享模式和独占模式。
① 共享模式:是一个锁允许多条线程同时操作;
如信号量Semaphore采用的就是基于AQS的共享模式实现的。
② 独占模式:是同一个时间段只能有一个线程对共享资源进行操作,多余的请求线程需要排队等待;
如ReentranLock。
--waitStatus变量:表示当前被封装成Node结点的等待状态。
共4种:
① CANCELLED:值为1,在同步队列中等待的线程等待超时或被中断,需要从同步队列中取消该Node的结点,其结点的waitStatus为CANCELLED,即结束状态,进入该状态后的结点将不会再变化。
② SIGNAL:值为-1,被标识为该等待唤醒状态的后继结点,当其前继结点的线程释放了同步锁或被取消,将会通知该后继结点的线程执行。说白了,就是处于唤醒状态,只要前继结点释放锁,就会通知标识为SIGNAL状态的后继结点的线程执行。
③ CONDITION:值为-2,与Condition相关,该标识的结点处于等待队列中,结点的线程等待在Condition上,当其他线程调用了Condition的signal()方法后,CONDITION状态的结点将从等待队列转移到同步队列中,等待获取同步锁。
④ PROPAGATE:值为-3,与共享模式相关,在共享模式中,该状态标识结点的线程处于可运行状态。
⑤ 0状态:值为0,代表初始化状态。
--pre和next:分别指向当前Node结点的前驱结点和后继结点;
--thread变量:存储的请求锁的线程。
--nextWaiter:与Condition相关,代表等待队列中的后继结点,后续会有更详细的分析。static final class Node {static final Node SHARED = new Node(); //共享模式static final Node EXCLUSIVE = null; //独占模式static final int CANCELLED = 1; //标识线程已处于结束状态static final int SIGNAL = -1; //等待被唤醒状态static final int CONDITION = -2; //条件状态,static final int PROPAGATE = -3; //在共享模式中使用表示获得的同步状态会被传播volatile int waitStatus; //等待状态,存在CANCELLED、SIGNAL、//CONDITION、PROPAGATE 4种volatile Node prev; //同步队列中前驱结点volatile Node next; //同步队列中后继结点volatile Thread thread; //请求锁的线程Node nextWaiter; //等待队列中的后继结点,这个与Condition有关final boolean isShared() { //判断是否为共享模式return nextWaiter == SHARED;}final Node predecessor() throws NullPointerException { //获取前驱结点Node p = prev;if (p == null)throw new NullPointerException();elsereturn p;}//.....}
3)总结
总之呢,AQS作为基础组件,对于锁的实现存在两种不同的模式,即共享模式(如Semaphore)和独占模式(如ReetrantLock),无论是共享模式还是独占模式的实现类,其内部都是基于AQS实现的,也都维持着一个虚拟的同步队列,当请求锁的线程超过现有模式的限制时,会将线程包装成Node结点并将线程当前必要的信息存储到node结点中,然后加入同步队列等会获取锁,而这系列操作都有AQS协助我们完成,这也是作为基础组件的原因,无论是Semaphore还是ReetrantLock,其内部绝大多数方法都是间接调用AQS完成的。
下面是AQS整体类图结构:

4)ReentrantLock与AQS的关系
1> ReentrantLock类和继承:
--AbstractOwnableSynchronizer:抽象类,定义了存储独占当前锁的线程和获取的方法
--AbstractQueuedSynchronizer:抽象类,AQS框架核心类,其内部以虚拟队列的方式管理线程的锁获取与锁释放,其中获取锁(tryAcquire方法)和释放锁(tryRelease方法)并没有提供默认实现,需要子类重写这两个方法实现具体逻辑,目的是使开发人员可以自由定义获取锁以及释放锁的方式。
--Node:AbstractQueuedSynchronizer 的内部类,用于构建虚拟队列(链表双向链表),管理需要获取锁的线程。
--Sync:抽象类,是ReentrantLock的内部类,继承自AbstractQueuedSynchronizer,实现了释放锁的操作(tryRelease()方法),并提供了lock抽象方法,由其子类实现。
--NonfairSync:是ReentrantLock的内部类,继承自Sync,非公平锁的实现类。
--FairSync:是ReentrantLock的内部类,继承自Sync,公平锁的实现类。
--ReentrantLock:实现了Lock接口的,其内部类有Sync、NonfairSync、FairSync,在创建时可以根据fair参数决定创建NonfairSync(默认非公平锁)还是FairSync。

2> ReentrantLock内部类:
--ReentrantLock内部存在3个实现类,分别是Sync、NonfairSync、FairSync。
--ReentrantLock的所有方法调用都通过间接调用AQS和Sync类及其子类来完成的。
--Sync类:继承自AQS实现了解锁tryRelease()方法;
--NonfairSync(非公平锁)、 FairSync(公平锁)则继承自Sync,实现了获取锁的tryAcquire()方法;
3> AQS
--AQS提供功能:
AQS是一个抽象类,但其源码中并没一个抽象的方法,这是因为AQS只是作为一个基础组件,并不希望直接作为直接操作类对外输出,而更倾向于作为基础组件,为真正的实现类提供基础设施,如构建同步队列,控制同步状态等,事实上,从设计模式角度来看,AQS采用的模板模式的方式构建的,其内部除了提供并发操作核心方法以及同步队列操作外,还提供了一些模板方法让子类自己实现,如加锁操作以及解锁操作,为什么这么做?
--为什么?设计理念:
这是因为AQS作为基础组件,封装的是核心并发操作,但是实现上分为两种模式,即共享模式与独占模式,而这两种模式的加锁与解锁实现方式是不一样的,但AQS只关注内部公共方法实现并不关心外部不同模式的实现,所以提供了模板方法给子类使用,也就是说实现独占锁,
如ReentrantLock需要自己实现tryAcquire()方法和tryRelease()方法,而实现共享模式的Semaphore,则需要实现tryAcquireShared()方法和tryReleaseShared()方法,
--好处:无论是共享模式还是独占模式,其基础的实现都是同一套组件(AQS),只不过是加锁解锁的逻辑不同罢了,更重要的是如果我们需要自定义锁的话,也变得非常简单,只需要选择不同的模式实现不同的加锁和解锁的模板方法即可,AQS提供给独占模式和共享模式的模板方法如下//AQS中提供的主要模板方法,由子类实现。public abstract class AbstractQueuedSynchronizerextends AbstractOwnableSynchronizer{protected boolean tryAcquire(int arg) { //独占模式下获取锁的方法throw new UnsupportedOperationException();}protected boolean tryRelease(int arg) { //独占模式下解锁的方法throw new UnsupportedOperationException();}protected int tryAcquireShared(int arg) { //共享模式下获取锁的方法throw new UnsupportedOperationException();}protected boolean tryReleaseShared(int arg) { //共享模式下解锁的方法throw new UnsupportedOperationException();}protected boolean isHeldExclusively() { //判断是否为持有独占锁throw new UnsupportedOperationException();}}
ReentrantLock-公平锁|非公平锁
- ReetrantLock,实现Lock接口,与synchronized作用相当,比其更灵活
ReetrantLock是基于AQS并发框架实现
- 公平锁、非公平锁(sxt2)
- 是什么
- 公平锁:是指多个线程按照申请锁的顺序来获取锁,满足FIFO。
- 非公平:是指多个线程获取锁的顺序并不是按照申请锁的顺序,有可能后申请的线程比现申请的线程优先获得锁,在高并发的情况下,有可能会造成优先级反战或者饥饿现象
- 区别
- 公平锁:就是很公平,在并发环境中,每个线程获取锁时会查看此锁维护的等待队列,如果为空,或者当前线程是等待队列的第一个,就占有锁,否则加入等待队列,以后会按照FIFO的规则从队列中取到自己
- 非公平锁:比较粗鲁,上来就尝试占有锁,如果尝试失败,在采用类似公平锁的方式(非公平锁的优点在于吞吐量比公平锁大)
- 其他
Syschronized而言,也是非公平锁(类似lock) ReentrantLock实现公平和非公平锁
//方法1:无参构造函数:默认非公平锁public ReentrantLock() {sync = new NonfairSync(); // 非公平锁}// 方法2:true时为公平锁,false时为非公平锁public ReentrantLock(boolean fair) {sync = fair ? new FairSync() : new NonfairSync();}
- ReentrantLock的创建可以制定构造函数的boolean类型来得到公平锁或非
在入口等待队列,锁都对应着一个等待队列,如果一个线程没有获得锁,就会进入等待队列,当有线程释放锁的时候,就需要从等待队列中唤醒一个等待的线程。
-- 如果是公平锁,唤醒的策略就是谁等待的时间长,就唤醒谁,很公平;
-- 如果是非公平锁,则不提供这个公平保证,有可能等待时间短的线程反而先被唤醒。----------------------------具体-------------------------------
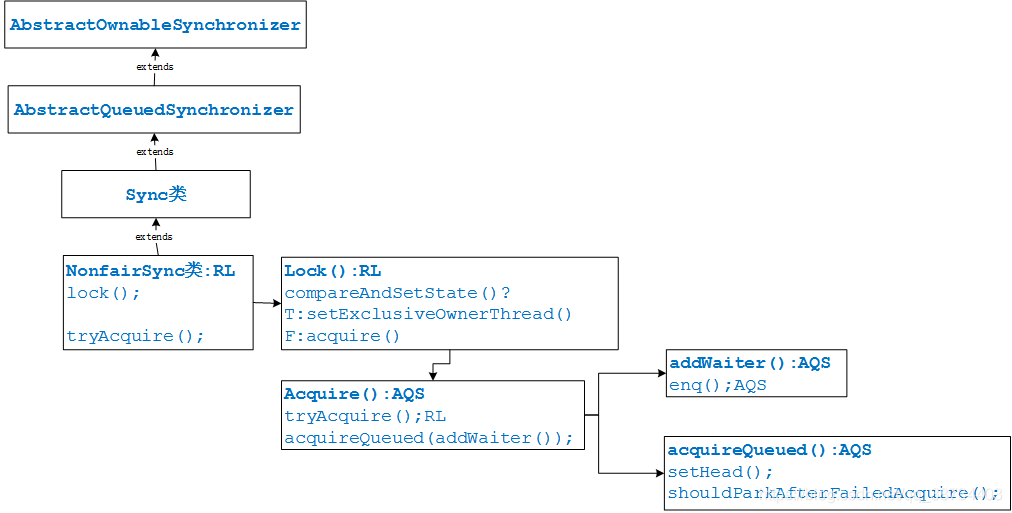
- AQS的实现过程:基于ReetrantLock进一步分析AQS独占模式实现过程,这也是ReetrantLock的内部实现原理。
1 ReetrantLock中非公平锁-lock
--AQS实现:
AQS同步器的实现依赖于内部的同步队列(FIFO的双向链表对列)完成对同步状态(state)的管理,当前线程获取锁(同步状态)失败时,AQS会将该线程以及相关等待信息包装成一个节点(Node)并将其加入同步队列,同时会阻塞当前线程,当同步状态释放时,会将头结点head中的线程唤醒,让其尝试获取同步状态。
--这里重点分析一下获取同步状态和释放同步状态以及如何加入队列的具体操作,这里从ReetrantLock入手分析AQS的具体实现,先以非公平锁为例进行分析。
--非公平锁public ReentrantLock() { //默认构造,创建非公平锁NonfairSyncsync = new NonfairSync();}public ReentrantLock(boolean fair) { //根据传入参数创建锁类型sync = fair ? new FairSync() : new NonfairSync();}public void lock() { //加锁操作 √sync.lock();}
--sync是个抽象类:
存在两个不同的实现子类,从非公平锁NonfairSync子类入手:流程:
1)lock加锁
获取锁时,首先对同步状态执行CAS操作,尝试把state的状态从0设置为1 ->
① 返回true:则代表获取同步状态成功,也就是当前线程获取锁成,可操作临界资源;
② 返回false: 则表示已有线程持有该同步状态(其值为1),获取锁失败,注意这里存在并发的情景,也就是可能同时存在多个线程设置state变量,因此是CAS操作保证了state变量操作的原子性。/**非公平锁实现*/static final class NonfairSync extends Sync {final void lock() { //加锁if (compareAndSetState(0, 1)) //执行CAS操作,获取同步状态//成功则将独占锁线程设置为当前线程setExclusiveOwnerThread(Thread.currentThread());elseacquire(1); //否则再次请求同步状态}}
2)lock->acquire(1)
返回false后,执行 acquire(1)-AQS方法,该方法是AQS中的方法,它对中断不敏感,即使线程获取同步状态失败,进入同步队列,后续对该线程执行中断操作也不会从同步队列中移出,方法如下
---传入参数arg:表示要获取同步状态后设置的值(即要设置state的值);
因为要获取锁,而status为0时是释放锁,1则是获取锁,所以一般传递参数为1,进入方法后首先会执行tryAcquire(arg)-ReetrantLock方法;
在前面分析过该方法在AQS中并没有具体实现,而是交由子类实现,因此该方法是由ReetrantLock类内部实现的public final void acquire(int arg) { //再次尝试获取同步状态if (!tryAcquire(arg) &&acquireQueued(addWaiter(Node.EXCLUSIVE), arg))selfInterrupt();}
3)tryAcquire(arg)
--tryAcquire(arg)在ReetrantLock的实现
--做了两件事:
① 尝试再次获取同步状态,如果获取成功则将当前线程设置为OwnerThread,否则失败;
② 判断当前线程current是否为OwnerThread,如果是则属于重入锁,state自增1,并获取锁成功,返回true,反之失败,返回false,也就是tryAcquire(arg)执行失败,返回false。
--注意:与公平锁不同的点:
nonfairTryAcquire(int acquires)内部使用的是CAS原子性操作设置state值,可以保证state的更改是线程安全的,因此只要任意一个线程调用nonfairTryAcquire(int acquires)方法并设置成功即可获取锁,不管该线程是新到来的还是已在同步队列的线程;
非公平锁特性,并不保证同步队列中的线程一定比新到来线程请求(可能是head结点刚释放同步状态然后新到来的线程恰好获取到同步状态)先获取到锁。//1 NonfairSync类static final class NonfairSync extends Sync {protected final boolean tryAcquire(int acquires) {return nonfairTryAcquire(acquires); //由nonfairTryAcquire实现}}//2 Sync类abstract static class Sync extends AbstractQueuedSynchronizer {final boolean nonfairTryAcquire(int acquires) { //nonfairTryAcquire方法final Thread current = Thread.currentThread();int c = getState();if (c == 0) { //判断同步状态是否为0,并尝试再次获取同步状态if (compareAndSetState(0, acquires)) { //执行CAS操作setExclusiveOwnerThread(current);return true;}}//如果当前线程已获取锁,属于重入锁,再次获取锁后将status值加1else if (current == getExclusiveOwnerThread()) {int nextc = c + acquires;if (nextc < 0) // overflowthrow new Error("Maximum lock count exceeded");//设置当前同步状态,当前只有一个线程持有锁,因为不会发生线程安全问题,可以直接执行 setState(nextc);setState(nextc);return true;}return false;}//省略其他代码}
4)再看acquire(int arg)
--理想情况:tryAcquire(arg)返回true,acquireQueued不执行,因为毕竟当前线程已获取到锁;
--tryAcquire(arg)返回false,则会执行addWaiter(Node.EXCLUSIVE)进行入队操作,由于ReentrantLock属于独占锁,因此结点类型为Node.EXCLUSIVEpublic final void acquire(int arg) { //再次尝试获取同步状态if (!tryAcquire(arg) &&acquireQueued(addWaiter(Node.EXCLUSIVE), arg))selfInterrupt();}
5)addWaiter
--创建Node:
创建了一个Node.EXCLUSIVE类型Node结点用于封装线程及其相关信息
--tail:其中,tail是AQS的成员变量,指向队尾(这点前面的我们分析过AQS维持的是一个双向的链表结构同步队列);
-> 如果是第一个结点,则为tail肯定为空,那么将执行enq(node)操作,如果非第一个结点即tail指向不为null,直接尝试执行CAS操作加入队尾,如果CAS操作失败还是会执行enq(node):private Node addWaiter(Node mode) {//将请求同步状态失败的线程封装成结点Node node = new Node(Thread.currentThread(), mode);Node pred = tail;//如果是第一个结点加入肯定为空,跳过。//如果非第一个结点则直接执行CAS入队操作,尝试在尾部快速添加if (pred != null) {node.prev = pred;//使用CAS执行尾部结点替换,尝试在尾部快速添加if (compareAndSetTail(pred, node)) {pred.next = node;return node;}}//如果第一次加入或者CAS操作没有成功执行enq入队操作enq(node);return node;}
6)enq(node)
--死循环:使用一个死循环进行CAS操作,可以解决多线程并发问题。
--做了两件事
① 如果还没有初始同步队列则创建新结点并使用compareAndSetHead设置头结点,tail也指向head;
② 队列已存在,则将新结点node添加到队尾。
注意:这两个步骤都存在同一时间多个线程操作的可能,如果有一个线程修改head和tail成功,那么其他线程将继续循环,直到修改成功,这里使用CAS原子操作进行头结点设置和尾结点tail替换可以保证线程安全,从这里也可以看出head结点本身不存在任何数据,它只是作为一个牵头结点,而tail永远指向尾部结点(前提是队列不为null)。private Node enq(final Node node) {for (;;) { //死循环Node t = tail;//如果队列为null,即没有头结点if (t == null) { // Must initialize//创建并使用CAS设置头结点if (compareAndSetHead(new Node()))tail = head;} else {//队尾添加新结点node.prev = t;if (compareAndSetTail(t, node)) {t.next = node;return t;} }}}

7)再看acquire()->acquireQueued()
--添加到同步队列后,结点就会进入一个自旋过程,即每个结点都在观察时机待条件满足获取同步状态,然后从同步队列退出并结束自旋;
--回到之前的acquire()方法,自旋过程是在acquireQueued(addWaiter(Node.EXCLUSIVE), arg))方法中执行的;
--自旋过程:
---当前线程在自旋(死循环)中获取同步状态,
---当且仅当前驱结点为头结点才尝试获取同步状态,这符合FIFO的规则,即先进先出,其次head是当前获取同步状态的线程结点,只有当head释放同步状态唤醒后继结点,后继结点才有可能获取到同步状态,因此后继结点在其前继结点为head时,才进行尝试获取同步状态,其他时刻将被挂起。
---进入if语句后调用setHead(node)方法,将当前线程结点设置为headfinal boolean acquireQueued(final Node node, int arg) {boolean failed = true;try {boolean interrupted = false;for (;;) { //自旋,死循环final Node p = node.predecessor(); //获取前驱结点// 1 当且仅当p为头结点才尝试获取同步状态if (p == head && tryAcquire(arg)) {setHead(node); //将node设置为头结点p.next = null; //清空原来头结点的引用便于GCfailed = false;return interrupted;}//2 如果前驱结点不是head,判断是否挂起线程if (shouldParkAfterFailedAcquire(p, node) &&parkAndCheckInterrupt())interrupted = true;}} finally {if (failed)cancelAcquire(node); //最终都没能获取同步状态,结束该线程的请求}}
8)setHead(node)
--设置为node结点被设置为head后,其thread信息和前驱结点将被清空,因为该线程已获取到同步状态(锁),正在执行了,也就没有必要存储相关信息了,head只有保存指向后继结点的指针即可;
--便于head结点释放同步状态后唤醒后继结点,执行结果如下图//设置为头结点private void setHead(Node node) {head = node;//清空结点数据node.thread = null;node.prev = null;}
--从图可知更新head结点的指向,将后继结点的线程唤醒并获取同步状态,调用setHead(node)将其替换为head结点,清除相关无用数据

9)shouldParkAfterFailedAcquire()
--如果前驱结点不是head执行shouldParkAfterFailedAcquire()方法
--作用:判断当前结点的前驱结点是否为SIGNAL状态(即等待唤醒状态),如果是则返回true。
如果结点的ws为CANCELLED状态(值为1>0),即结束状态,则说明该前驱结点已没有用应该从同步队列移除,执行while循环,直到寻找到非CANCELLED状态的结点。
倘若前驱结点的ws值不为CANCELLED,也不为SIGNAL(当从Condition的条件等待队列转移到同步队列时,结点状态为CONDITION因此需要转换为SIGNAL),那么将其转换为SIGNAL状态,等待被唤醒。
--shouldParkAfterFailedAcquire()方法返回true:
即前驱结点为SIGNAL状态同时又不是head结点,那么使用parkAndCheckInterrupt()方法挂起当前线程,称为WAITING状态,需要等待一个unpark()操作来唤醒它,到此ReetrantLock内部间接通过AQS的FIFO的同步队列就完成了lock()操作。//如果前驱结点不是head,判断是否挂起线程if (shouldParkAfterFailedAcquire(p, node) &&parkAndCheckInterrupt())interrupted = true;}private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {//获取当前结点的等待状态int ws = pred.waitStatus;//如果为等待唤醒(SIGNAL)状态则返回trueif (ws == Node.SIGNAL)return true;//如果ws>0 则说明是结束状态,//遍历前驱结点直到找到没有结束状态的结点if (ws > 0) {do {node.prev = pred = pred.prev;} while (pred.waitStatus > 0);pred.next = node;} else {//如果ws小于0又不是SIGNAL状态,//则将其设置为SIGNAL状态,代表该结点的线程正在等待唤醒。compareAndSetWaitStatus(pred, ws, Node.SIGNAL);}return false;}private final boolean parkAndCheckInterrupt() {//将当前线程挂起LockSupport.park(this);//获取线程中断状态,interrupted()是判断当前中断状态,//并非中断线程,因此可能true也可能false,并返回return Thread.interrupted();}
--总结成逻辑流程图:
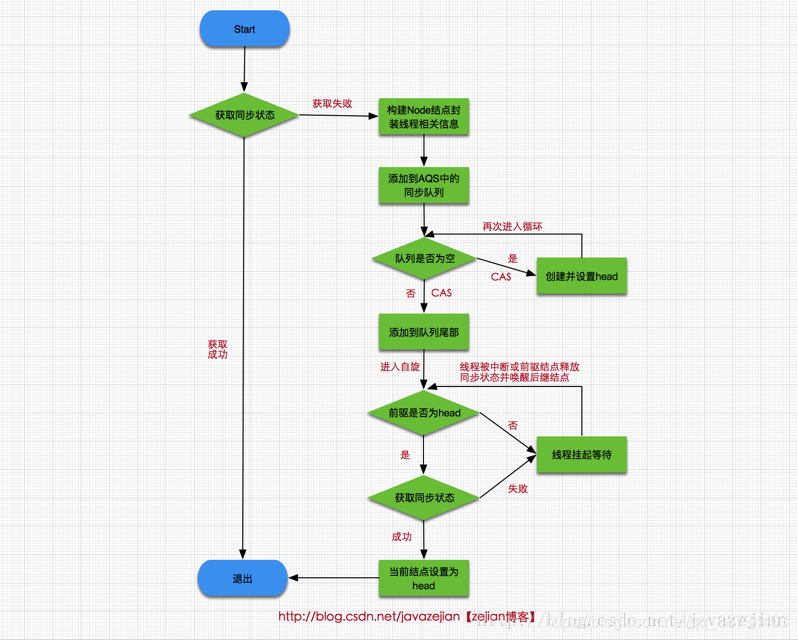
2 ReetrantLock中非公平锁-可中断lock
--获取锁的操作,这里看看另外一种可中断的获取方式,即调用ReentrantLock类的lockInterruptibly()或者tryLock()方法,最终它们都间接调用到doAcquireInterruptibly()
1)doAcquireInterruptibly()private void doAcquireInterruptibly(int arg)throws InterruptedException {final Node node = addWaiter(Node.EXCLUSIVE);boolean failed = true;try {for (;;) {final Node p = node.predecessor();if (p == head && tryAcquire(arg)) {setHead(node);p.next = null; // help GCfailed = false;return;}if (shouldParkAfterFailedAcquire(p, node) &&parkAndCheckInterrupt())//直接抛异常,中断线程的同步状态请求throw new InterruptedException();}} finally {if (failed)cancelAcquire(node);}}
--最大的不同是:
--检测到线程的中断操作后,直接抛出异常,从而中断线程的同步状态请求,移除同步队列。if (shouldParkAfterFailedAcquire(p, node) &&parkAndCheckInterrupt())//直接抛异常,中断线程的同步状态请求throw new InterruptedException();
3 ReetrantLock中非公平锁-unlock()
1)release(1)
--释放锁实现:
释放同步状态的操作相对简单些,tryRelease(int releases)方法是ReentrantLock类中内部类自己实现的,因为AQS对于释放锁并没有提供具体实现,必须由子类自己实现。
--唤醒:
释放同步状态后会使用unparkSuccessor(h)唤醒后继结点的线程;public void unlock() { //ReentrantLock类的unlocksync.release(1);}public final boolean release(int arg) { //AQS类的release()方法if (tryRelease(arg)) { //尝试释放锁Node h = head;if (h != null && h.waitStatus != 0)unparkSuccessor(h); //唤醒后继结点的线程return true;}return false;}//ReentrantLock类中的内部类Sync实现的tryRelease(int releases)protected final boolean tryRelease(int releases) {int c = getState() - releases;if (Thread.currentThread() != getExclusiveOwnerThread())throw new IllegalMonitorStateException();boolean free = false;if (c == 0) { //判断状态是否为0,如果是则说明已释放同步状态free = true;setExclusiveOwnerThread(null); //设置Owner为null}setState(c); //设置更新同步状态return free;}
2)unparkSuccessor(h)
--作用:用unpark()唤醒同步队列中最前边未放弃线程(也就是状态为CANCELLED的线程结点s)。
--前面acquireQueued():进入自旋的函数acquireQueued(),s结点的线程被唤醒后,会进入acquireQueued()函数的if (p == head && tryAcquire(arg))的判断,如果p!=head也不会有影响,因为它会执行shouldParkAfterFailedAcquire(),由于s通过unparkSuccessor()操作后已是同步队列中最前边未放弃的线程结点,那么通过shouldParkAfterFailedAcquire()内部对结点状态的调整,s也必然会成为head的next结点,因此再次自旋时p==head就成立了,然后s把自己设置成head结点,表示自己已经获取到资源了,最终acquire()也返回了,这就是独占锁释放的过程。private void unparkSuccessor(Node node) {//这里,node一般为当前线程所在的结点。int ws = node.waitStatus;if (ws < 0) //置零当前线程所在的结点状态,允许失败。compareAndSetWaitStatus(node, ws, 0);Node s = node.next; //找到下一个需要唤醒的结点sif (s == null || s.waitStatus > 0) {//如果为空或已取消s = null;for (Node t = tail; t != null && t != node; t = t.prev)if (t.waitStatus <= 0) //从这里可以看出,<=0的结点,都是还有效的结点。s = t;}if (s != null)LockSupport.unpark(s.thread); //唤醒}
--总结:
在AQS同步器中维护着一个同步队列,当线程获取同步状态失败后,将会被封装成Node结点,加入到同步队列中并进行自旋操作,当当前线程结点的前驱结点为head时,将尝试获取同步状态,获取成功将自己设置为head结点。在释放同步状态时,则通过调用子类(ReetrantLock中的Sync内部类)的tryRelease(int releases)方法释放同步状态,释放成功则唤醒后继结点的线程。4 ReetrantLock中公平锁
--与非公平锁不同的:
在获取锁的时,公平锁的获取顺序是完全遵循时间上的FIFO规则,也就是说先请求的线程一定会先获取锁,后来的线程肯定需要排队,这点与前面我们分析非公平锁的nonfairTryAcquire(int acquires)方法实现有锁不同,下面是公平锁中tryAcquire()方法的实现
--该方法与nonfairTryAcquire(int acquires)方法唯一的不同是在使用CAS设置尝试设置state值前,调用了hasQueuedPredecessors()判断同步队列是否存在结点,如果存在必须先执行完同步队列中结点的线程,当前线程进入等待状态。
--这就是非公平锁与公平锁最大的区别:
公平锁在线程请求到来时先会判断同步队列是否存在结点,如果存在先执行同步队列中的结点线程,当前线程将封装成node加入同步队列等待。
非公平锁,当线程请求到来时,不管同步队列是否存在线程结点,直接尝试获取同步状态,获取成功直接访问共享资源。
注意:在绝大多数情况下,非公平锁才是我们理想的选择,毕竟从效率上来说非公平锁总是胜于公平锁。//公平锁FairSync类中的实现protected final boolean tryAcquire(int acquires) {final Thread current = Thread.currentThread();int c = getState();if (c == 0) {//注意!!这里先判断同步队列是否存在结点if (!hasQueuedPredecessors() &&compareAndSetState(0, acquires)) {setExclusiveOwnerThread(current);return true;}}else if (current == getExclusiveOwnerThread()) {int nextc = c + acquires;if (nextc < 0)throw new Error("Maximum lock count exceeded");setState(nextc);return true;}return false;}
- 5 小结
以上便是ReentrantLock的内部实现原理,这里我们简单进行小结,重入锁ReentrantLock,是一个基于AQS并发框架的并发控制类,其内部实现了3个类,分别是Sync、NoFairSync以及FairSync类,其中Sync继承自AQS,实现了释放锁的模板方法tryRelease(int),而NoFairSync和FairSync都继承自Sync,实现各种获取锁的方法tryAcquire(int)。ReentrantLock的所有方法实现几乎都间接调用了这3个类,因此当我们在使用ReentrantLock时,大部分使用都是在间接调用AQS同步器中的方法,这就是ReentrantLock的内部实现原理,最后给出张类图结构
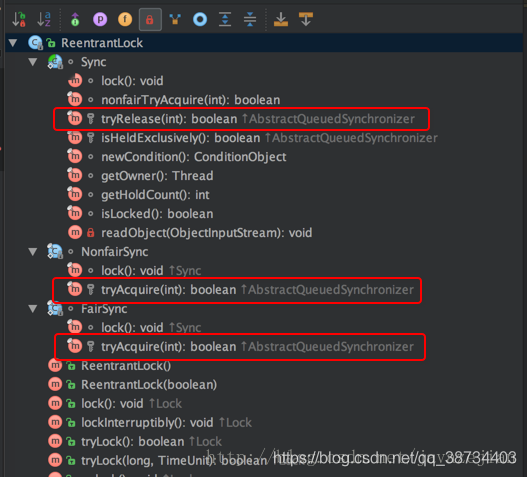
Condition
-
- ReentrantLock的Condition的特性? -- 存疑?
- --Lock 和 Condition实现的管程,线程等待和通知需要调用await()、signal()、signalAll(),语义和wait()、notify()、notifyAll()是相同的。
-- 区别是,Lock&Condition实现的管程里只能使用前面的await()、signal()、signalAll(),而后面的wait()、notify()、notifyAll()只有在synchronized实现的管程里才能使用。
-- 如果一不小心在Lock&Condition实现的管程里调用了wait()、notify()、notifyAll(),那程序可就彻底玩儿完了**。 - Condition实现了管程模型里面的条件变量。
- 管程中,Java 语言内置的管程里只有一个条件变量,Lock&Condition实现的管程是支持多个条件变量的,这是二者的一个重要区别。
例如,实现一个阻塞队列,就需要两个条件变量。
一个阻塞队列,需要两个条件变量,一个是队列不空(空队列不允许出队),另一个是队列不满(队列已满不允许入队)。相关的代码:public class BlockedQueue<T>{final Lock lock = new ReentrantLock();// 条件变量:队列不满final Condition notFull = lock.newCondition();// 条件变量:队列不空final Condition notEmpty = lock.newCondition();// 入队void enq(T x) {lock.lock();try {while (队列已满){// 等待队列不满notFull.await();}// 省略入队操作...// 入队后, 通知可出队notEmpty.signal();}finally {lock.unlock();}}// 出队void deq(){lock.lock();try {while (队列已空){// 等待队列不空notEmpty.await();}// 省略出队操作...// 出队后,通知可入队notFull.signal();}finally {lock.unlock();}}}
ReadWriteLock读写锁
ReadWriteLock是一个接口,它的实现类是ReentrantReadWriteLock;
- 独占锁(写锁)、共享锁(读锁)、互斥锁?
- 是什么?
独占:该锁一次只能被一个线程持有,ReentrantLock和synchronized都是独占锁
共享:该锁可以被多个线程持有 - ReentrantReadWriteLock其读锁是共享锁,其写锁是独占锁。
syc -> lock -> ReentrantReadWriteLock(签名场景,一致性、并发性) - 读锁的共享锁可保证并发读是非常高效的,读写、写读、写写过程是互斥的
读写锁与互斥锁一个重要区别:
读写锁允许多个线程同时读共享变量,而互斥锁是不允许的,这是读写锁在读多写少场景下性能优于互斥锁的关键。但读写锁的写操作是互斥的,当一个线程在写共享变量的时候,是不允许其他线程执行写操作和读操作。- 读写锁咋实现的
可以多个读,只能一个写
// 线程在高内聚低耦合下操纵资源类class MyCache{ // 资源类private volatile Map<String,Object> map = new HashMap<>();//实现ReadWriteLock接口(不是Lock的实现类) Lock,只有一个线程// private Lock lock = new ReentrantLock();//要求写的时候一个线程进去,读的时候多个线程private ReentrantReadWriteLock rwLock = new ReentrantReadWriteLock();public void put(String key,Object value){rwLock.writeLock().lock();try {System.out.println(Thread.currentThread().getName() + "\t正在写入:" + key);//模拟网络延迟try {TimeUnit.MILLISECONDS.sleep(300);} catch (InterruptedException e) {e.printStackTrace();}map.put(key,value);System.out.println(Thread.currentThread().getName() + "\t写入完成!");}catch (Exception e){e.printStackTrace();}finally {rwLock.writeLock().unlock();}}public void get(String key){rwLock.readLock().lock();try {System.out.println(Thread.currentThread().getName() + "\t正在读取:");//模拟网络延迟try {TimeUnit.MILLISECONDS.sleep(300);} catch (InterruptedException e) {e.printStackTrace();}Object result = map.get(key);System.out.println(Thread.currentThread().getName() + "\t读取完成:" + result);} catch (Exception e) {e.printStackTrace();} finally {rwLock.readLock().unlock();}}}/*** 多个线程同时读一个资源类没有问题,所以为了满足并发量,读取共享资源应该可以同时进行。* 但是* 如果有一个线程想去写共享资源,就不能再有其他线程可以对该资源进行读或写* 小总结:* 读-读 能共存* 读-写 不能共存* 写-写 不能共存** 写操作:原子+独占,整个过程必须是一个完整的统一体,中间不允许被分割被打断。*/public class ReadWriteLockDemo {public static void main(String[] args) {MyCache myCache = new MyCache();for (int i = 1; i <= 5; i++) {System.out.println("W-"+i);final int tempInt = i;new Thread(()->{myCache.put(String.valueOf(tempInt),String.valueOf(tempInt));},"W-"+String.valueOf(i)).start();}for (int i = 1; i <= 5; i++) {final int tempInt = i;new Thread(()->{myCache.get(String.valueOf(tempInt));},"R-"+String.valueOf(i)).start();}}}
Semaphore
- Sp_zejian
- Semaphore->控制资源并发访问
--Semaphore 可以理解为信号量,用于控制资源能够被并发访问的线程数量,以保证多个线程能够合理的使用特定限制资源。
--场景:Semaphore 可以用于做流量控制,特别是公共资源有限的应用场景,比如数据库连接。
假如有多个线程读取数据后,需要将数据保存在数据库中,而可用的最大数据库连接只有 10 个,这时候就需要使用Semaphore来控制能够并发访问到数据库连接资源的线程个数最多只有 10 个。在限制资源使用的应用场景下,Semaphore 是特别合适的。
- Semaphore信号量?
- 只允许一个线程执行访问临界区,实现互斥锁功能;
用于控制资源能够被并发访问的线程数量/可以允许多个线程访问一个临界区;
- 怎么控制并发?
- 控制方法的并发量(Semaphore信号量方案)(优)
https://aalion.github.io/2019/12/28/concurrency82/ - 控制并发量(计数器方案)
控制并发量(阻塞队列方案)
https://blog.csdn.net/manzhizhen/article/details/81413014 √
https://blog.csdn.net/qq_36468243/article/details/86622942- 其他的限流方式有什么,如何实现的-并发限流?
CountDownLatch|CyclicBarrier
- 并发工具类CountDownLatch、CyclicBarrier?
--是Java并发包提供的两个非常易用的线程同步工具类
--用法的区别:
① CountDownLatch主要用来解决一个线程等待多个线程的场景;CyclicBarrier是一组线程之间互相等待。
② CountDownLatch的计数器是不能循环利用的,也就是说一旦计数器减到 0,再有线程调用await(),该线程会直接通过。但CyclicBarrier 的计数器是可以循环利用的,而且具备自动重置的功能,一旦计数器减到 0 会自动重置到你设置的初始值。
③ CyclicBarrier 还可以设置回调函数,可以说是功能丰富。 说说倒计时器(CountDownLatch)和循环栅栏(CyclicBarrier)的区别
-- CountDownLatch 强调一个线程等多个线程完成某件事情。一般用于某个线程 A 等待若干个其他线程执行完任务之后,它才执行;而 CyclicBarrier 是多个线程互等,等大家都完成,再携手共进。一般用于一组线程互相等待至某个状态,然后这一组线程再同时执行;
--调用 CountDownLatch 的 countDown,当前线程并不会阻塞,会继续往下执行;而调用 CyclicBarrier 的 await 方法,会阻塞当前线程,直到 CyclicBarrier 指定的线程全部都到达了指定点的时候,才能继续往下执行;
--CountDownLatch 0时释放所有等待的线程,计数为0时,无法重置,不可重复利用。CyclicBarrier 是可以复用的,reset()方法重置屏障点,计数器会归零,重新开始计数。
https://aalion.github.io/2019/12/28/concurrency81/---------------具体----------------
- 3 区别
1 CountDownLatch 一般用于某个线程 A 等待若干个其他线程执行完任务之后,它才执行;而 CyclicBarrier 一般用于一组线程互相等待至某个状态,然后这一组线程再同时执行;CountDownLatch 强调一个线程等多个线程完成某件事情。CyclicBarrier 是多个线程互等,等大家都完成,再携手共进。
2 调用 CountDownLatch 的 countDown 方法后,当前线程并不会阻塞,会继续往下执行;而调用 CyclicBarrier 的 await 方法,会阻塞当前线程,直到 CyclicBarrier指定的线程全部都到达了指定点的时候,才能继续往下执行;
3 CountDownLatch 方法比较少,操作比较简单,而 CyclicBarrier 提供的方法更多,比如能够通过getNumberWaiting(),isBroken()这些方法获取当前多个线程的状态,并且 CyclicBarrier 的构造方法可以传入 barrierAction,指定当所有线程都到达时执行的业务功能;
4 CountDownLatch 是不能复用的,而 CyclicBarrier 是可以复用的。 1 CountDownLatch->倒计时器
--使用场景:在多线程协作完成业务功能时,有时候需要等待其他多个线程完成任务之后,主线程才能继续往下执行业务功能。例如,在主线程中启动10个子线程去数据库中获取分页数据,需要等到所有线程数据都返回之后统一做统计处理
--例子:
6人运动员跑步比赛,裁判员在终点计时,可以想象每当一个运动员到达终点的时候,对于裁判员来说就少了一个计时任务。直到所有运动员都到达终点了,裁判员的任务也才完成。
这 6 个运动员可以类比成 6 个线程,当线程调用 CountDownLatch.countDown 方法时就会对计数器的值减一,直到计数器的值为 0 的时候,裁判员(调用 await 方法的线程)才能继续往下执行。public class D81_CountDownLatchDemo{private static CountDownLatch startSingnal=new CountDownLatch(1);//构造方法//用来表示裁判员需要维护的是6个运动员public static CountDownLatch endSingnal=new CountDownLatch(6);//构造方法public static void main (String[] args) throws InterruptedException{// 创建一个固定大小的线程池ExecutorService executorService= Executors.newFixedThreadPool(6);for (int i = 0; i <6; i++) {executorService.execute(()->{try {System.out.println(Thread.currentThread().getName()+"运动员等待裁判响哨~");startSingnal.await();//等到构造方法传入的 N 减到 0 的时候,当前调用await方法的线程继续执行System.out.println(Thread.currentThread().getName()+"正在冲刺~");endSingnal.countDown();//使 CountDownLatch 值 N 减 1System.out.println(Thread.currentThread().getName()+"到达终点~");} catch (InterruptedException e) {e.printStackTrace();}});}Thread.sleep(1000);System.out.println("裁判发令~");startSingnal.countDown();endSingnal.await();System.out.println("全部到达终点,比赛结束~");executorService.shutdown();}}//输出pool-1-thread-1运动员等待裁判响哨~pool-1-thread-5运动员等待裁判响哨~pool-1-thread-3运动员等待裁判响哨~pool-1-thread-2运动员等待裁判响哨~pool-1-thread-6运动员等待裁判响哨~pool-1-thread-4运动员等待裁判响哨~裁判发令~pool-1-thread-1正在冲刺~pool-1-thread-1到达终点~pool-1-thread-5正在冲刺~pool-1-thread-5到达终点~pool-1-thread-3正在冲刺~pool-1-thread-3到达终点~pool-1-thread-2正在冲刺~pool-1-thread-2到达终点~pool-1-thread-6正在冲刺~pool-1-thread-6到达终点~pool-1-thread-4正在冲刺~pool-1-thread-4到达终点~全部到达终点,比赛结束~
2CyclicBarrier->循环栅栏
--例子
开运动会时,会有跑步这一项运动,我们来模拟下运动员入场时的情况,假设有 6 条跑道,在比赛开始时,就需要6个运动员在比赛开始的时候都站在起点了,裁判员吹哨后才能开始跑步。跑道起点就相当于“barrier”,是临界点,而这6个运动员就类比成线程的话,就是这 6 个线程都必须到达指定点了,意味着凑齐了一波,然后才能继续执行,否则每个线程都得阻塞等待,直至凑齐一波即可。cyclic 是循环的意思,也就是说 CyclicBarrier 当多个线程凑齐了一波之后,仍然有效,可以继续凑齐下一波。public class CyclicBarrierDemo {//指定必须有6个运动员到达才行,构造方法public CyclicBarrier(int parties, Runnable barrierAction)private static CyclicBarrier barrier = new CyclicBarrier(6, () -> {System.out.println("所有运动员已入场,裁判吹起跑哨~");});public static void main(String[] args) {System.out.println("运动员准备入场,欢呼~");ExecutorService service = Executors.newFixedThreadPool(6);for (int i = 0; i < 6; i++) {service.execute(() -> {try {System.out.println(Thread.currentThread().getName() + "运动员,进场");barrier.await();//等到所有的线程都到达指定的临界点:6人到齐System.out.println(Thread.currentThread().getName() + "运动员出发~");} catch (InterruptedException e) {e.printStackTrace();} catch (BrokenBarrierException e) {e.printStackTrace();}});}}}
Exchange
- 有没有用过java中的Exchange (多线程)
- Exchanger 是一个用于线程间协作的工具类,用于两个线程间能够交换。它提供了一个交换的同步点,在这个同步点两个线程能够交换数据。
https://aalion.github.io/2019/12/28/concurrency83/
并发容器
- 线程安全的List
--线程安全的集合:
Vector | HashTable | StringBuffer
--非线程安全的:
ArrayList|LinkedList|HashMap|HashSet|TreeMap|TreeSet|StringBulider - 并发容器?
4大类:List、Map、Set和Queue
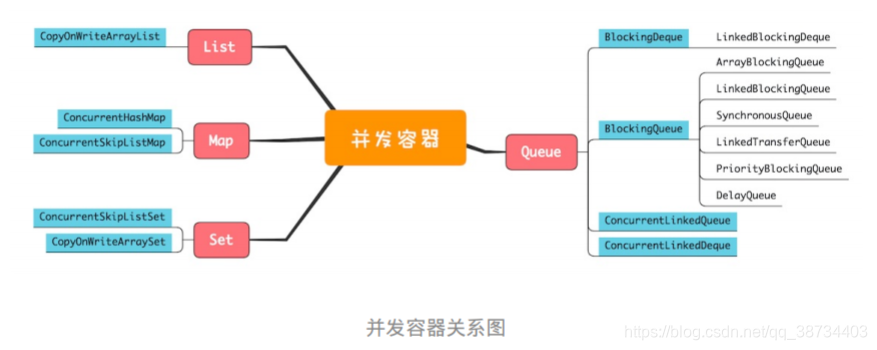
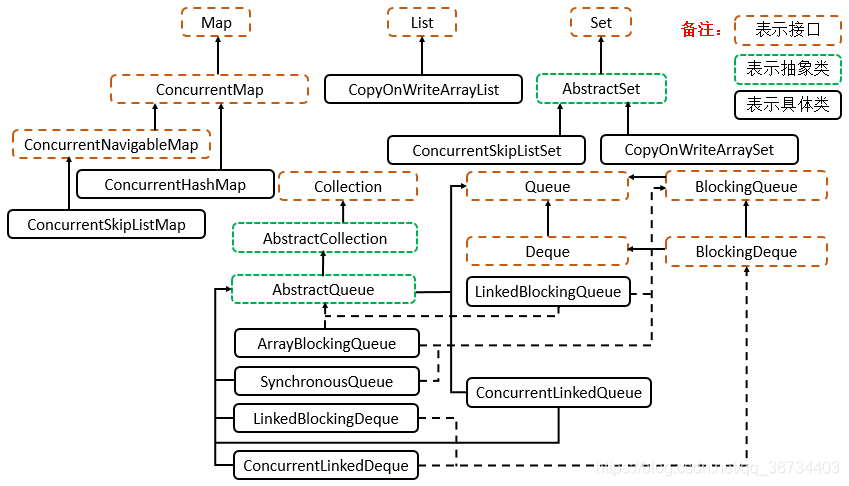
CopyOnWriteArrayList
ArrayList是线程不安全的,例子以及解决方案(sxt2)
- 1)非线程安全例子
psvm{List<String> list = new ArrayList<>();for(int i=1; i<30; i++){new Thread(() -> {list.aa(UUID.randomUUID().toString().substring(0,8));sout(list);},String.valueOf(i)).start();}}
① 故障现象:java.util.ConcurrentModificationException(并发修改异常)
② 导致原因:并发争抢修改导致,一个正在写,另一个线程过来抢夺,导致数据不一致异常。并发生修改异常。
③ 解决方案:
④ 优化建议(同样的错误不犯第2次)- eg:开启多个线程操作List集合,向ArrayList中增加元素,同时去除元素。
会出现以下几种情况:①Null②某些线程并未打印③数组下标越界异常 2)解决非线程安全
方案1:使用Vertor集合
缺点:Vertor加锁可以保证数据一致性,但并发性低new Vector<>();
方案2:使用Collections.synchronizedList
Collection:集合接口
Collections:集合接口辅助类
缺点:Collections.synchronizedList(new ArrayList<>());
方案3:使用JUC中的CopyOnWriteArrayList类替换。
new CopyOnWriteArraylist<>();
3)实现-Collections.synchronizedList实现
初始化
ArrayList arrayList = new ArrayList();List list2 = Collections.synchronizedList(arrayList);
add方法:通过关键字synchronized同步
public void add(int index, E element) {synchronized (mutex) {list.add(index, element);}}
get方法:synchronized
public V get(Object key) {synchronized (mutex) {return m.get(key);}}
实现-②CopyonwriteArrayList(写时复制,读写分离的思想)
- add:使用reentrantlock
Arrays.copyOf,扩容长度+1
/** The lock protecting all mutators */transient final ReentrantLock lock = new ReentrantLock();/** The array, accessed only via getArray/setArray. */private volatile transient Object[] array;//保证了线程的可见性public boolean add(E e) {final ReentrantLock lock = this.lock;//ReentrantLock 保证了线程的可见性和顺序性,即保证了多线程安全。// 获取独占锁lock.lock();try {Object[] elements = getArray();int len = elements.length;Object[] newElements = Arrays.copyOf(elements, len + 1);//在原先数组基础之上新建长度+1的数组,并将原先数组当中的内容拷贝到新数组当中。newElements[len] = e;//设值setArray(newElements);//对新数组进行赋值return true;} finally {lock.unlock();}}
get:无锁
public E get(int index) {return get(getArray(), index);}
- 1)非线程安全例子
CopyOnWriteArrayList,咋实现线程安全的?。
- 当向容器添加或删除元素的时候,不直接往当前容器添加删除,而是先将当前容器进行Copy,复制出一个新的容器,然后新的容器里添加删除元素,添加删除完元素之后,再将原容器的引用指向新的容器,整个过程加锁,保证了写的线程安全。
- 而因为写操作的时候不会对当前容器做任何处理,所以我们可以对容器进行并发的读,而不需要加锁,也就是读写分离。
- 一般来讲我们使用时,会用一个线程向容器中添加元素,一个线程来读取元素,而读取的操作往往更加频繁。写操作加锁保证了线程安全,读写分离保证了读操作的效率,简直完美。
- 补充(sxt2):
写时复制的概念:CopyOnWrite容器即写时复制的容器。往一个容器添加元素的时候,不直接往当前容器Object[]添加,而是先将当前容器Object[]进行复制,复制出一个新的容器Object[] newElements,然后向新的容器里添加元素,添加完元素之后,再将原容器的引用指向新的容器。这样做的好处是我们可以对CopyOnWrite容器进行并发的读,而不需要加锁,因为当前容器不会添加任何元素。所以CopyOnWrite容器也是一种读写分离的思想,读和写不同的容器。
Collections.synchronizedList和CopyOnWriteArrayList的异同点?
1)同: 实现线程安全的列表方式
2)异:- synchronizedList的add和get都是使用同步锁。
读写比较均匀的并发场景。
多线程下写性能比COWAL要好很多,而读采用了synchronized,读性能不如COWAL。 - CopyOnWriteArrayList 的add使用可重入锁,get数据无锁。
读多写少的并发场景。写性能较差,而多线程的读性能较好。发生修改时候做copy,新老版本分离,保证读的高性能,适用于以读为主,读远远大于写的场景中使用,比如缓存。比如白名单,黑名单,商品类目的访问和更新场景。
优点:可以进行并发的读,而不需要加锁,因为当前容器不会添加任何元素。
- synchronizedList的add和get都是使用同步锁。
CopyOnWriteArrayList写的时候读会读到空数据吗?
- 读取操作没有任何同步控制和锁操作,理由就是内部数组array不会发生修改,只会被另外一个 array 替换,因此可以保证数据安全。
- 添加集合的时候加了锁,保证了同步,避免了多线程写的时候会copy出多个副本出来。
ConcurrentHashMap->Map
- 实现|总_jg|详细_jg|详细_ab|1.7、1.8的不同
- 原理
概述1.7、1.8如何实现的 - 1.8 put
- 1.8 get
- 1.8 resize
- 不同
ConcurrentHashmap和Hashtable
【ConcurrentHashmap和Hashtable都是支持并发的,这样会有一个问题,当你通过get(k)获取对应的value时,如果获取到的是null时,你无法判断,它是put(k,v)的时候value为null,还是这个key从来没有做过映射。HashMap是非并发的,可以通过contains(key)来做这个判断。而支持并发的Map在调用m.contains(key)和m.get(key),m可能已经不同了。】- 并发了解过吗,ConcurrentHashMap 为什么能实现线程安全
- 使用了大量 synchronized,以及 CAS 无锁操作以保证 ConcurrentHashMap 操作的线程安全性。
底层数据结构改变为采用数组+链表+红黑树的数据形式。
https://juejin.im/post/5aeeaba8f265da0b9d781d16- CurrentHashMap和HashMap的区别?
1)区别
HashMap是线程不安全的?
原因:
1、方法不是同步的
2、resize()方法在高并发的情况下,可能会引起死循环。
场景:resize()进行扩容时,需要rehash(),就是重新计算已有结点存放的位置。这个过程是非常耗费时间和空间的
问题关键:resize()方法中的transfer()方法进行位置重排时,因为不同的线程是对同一个数据块进行重排,所以才导致的问题
https://blog.csdn.net/hh1sdfsf56456/article/details/81331521
- CurrentHashMap和HashMap的区别?
CopyOnWriteArraySet
Set非线程安全
1) 线程安全问题
故障现象:java.util.ConcurrentModificationException(并发修改异常)Collections.syschronizedSet(new hashSet<>());new CopyOnWriteArraySet<>(); //底层还是CopyOnWriteArrayList()方法实现的
ThreadLocal
ThreadLocal
- 1 作用:
主要是做数据隔离,填充的数据只属于当前线程,变量的数据对别的线程而言是相对隔离的,在多线程环境下,如何防止自己的变量被其它线程篡改。 2 原理
1) 使用
--线程进来之后初始化一个可以泛型的ThreadLocal对象,之后这个线程只要在remove之前去get,都能拿到之前set的值,注意这里我说的是remove之前.ThreadLocal<String> localName = new ThreadLocal();localName.set("张三");String name = localName.get();localName.remove();
2)set源码
public void set(T value) {Thread t = Thread.currentThread(); // 获取当前线程ThreadLocalMap map = getMap(t); // 获取ThreadLocalMap对象if (map != null) // 校验对象是否为空map.set(this, value); // 不为空setelsecreateMap(t, value); // 为空创建一个map对象}
--ThreadLocalMap是当前线程Thread一个叫threadLocals的变量中获取的。
--隔离的实现:每个线程Thread都维护了自己的threadLocals变量,所以在每个线程创建ThreadLocal的时候,实际上数据是存在自己线程Thread的threadLocals变量里面的,别人没办法拿到,从而实现了隔离。// 代码段1ThreadLocalMap getMap(Thread t) {return t.threadLocals;}// 代码段2public class Thread implements Runnable {……ThreadLocal.ThreadLocalMap threadLocals = null;ThreadLocal.ThreadLocalMap inheritableThreadLocals = null;……
3)ThreadLocalMap底层结构
详见后面;
7)对象的存放位置
--Java中对象存储:
栈内存归属于单个线程,每个线程都会有一个栈内存,其存储的变量只能在其所属线程中可见,即栈内存可以理解成线程的私有内存,而堆内存中的对象对所有线程可见,堆内存中的对象可以被所有线程访问。
--threadlocal示例及值:堆
ThreadLocal实例实际上也是被其创建的类持有(更顶端应该是被线程持有),而ThreadLocal的值其实也是被线程实例持有,它们都是位于堆上,只是通过一些技巧将可见性修改成了线程可见。
8)线程共享ThreadLocal的数据
--InheritableThreadLocal类:
实现多个线程访问ThreadLocal的值,在主线程中创建一个InheritableThreadLocal的实例,然后在子线程中得到这个InheritableThreadLocal实例设置的值。
--测试输出:
在子线程中我是能够正常输出那一行日志的,这也是我之前面试视频提到过的父子线程数据传递的问题。private void test() {final ThreadLocal threadLocal = new InheritableThreadLocal();threadLocal.set("帅得一匹");Thread t = new Thread() {@Overridepublic void run() {super.run();Log.i( "张三帅么 =" + threadLocal.get());}};t.start();}
--父子线程数据传递:
① inheritableThreadLocals变量:public class Thread implements Runnable {……ThreadLocal.ThreadLocalMap threadLocals = null;ThreadLocal.ThreadLocalMap inheritableThreadLocals = null;……
②Thread.init初始化创建源码:
--线程的inheritThreadLocals变量不为空,如上面的例子,且父线程的inheritThreadLocals也存在,那么就把父线程的inheritThreadLocals给当前线程的inheritThreadLocals。(或者说是复制)public class Thread implements Runnable {……if (inheritThreadLocals && parent.inheritableThreadLocals != null)this.inheritableThreadLocals=ThreadLocal.createInheritedMap(parent.inheritableThreadLocals);……}
9)内存泄露
--ThreadLocal在保存的时候会把自己当做Key存在ThreadLocalMap中;
--正常情况应该是key和value都应该被外界强引用才对,但现在key被设计成WeakReference弱引用。
--弱引用:只能存活到下一次GC前
--概念:
①Memory overflow:内存溢出,没有足够的内存提供申请者使用。
②Memory leak:内存泄漏,程序申请内存后,无法释放已申请的内存空间,内存泄漏的堆积终将导致内存溢出。
--内存泄漏问题:
ThreadLocal在没有外部强引用时,发生GC时key会被回收,如果创建ThreadLocal的线程一直持续运行,那么这个Entry对象中的value就有可能一直得不到回收,发生内存泄露。
一般一个线程使用完,ThreadLocalMap是应该要被清空的,但是现在线程被复用
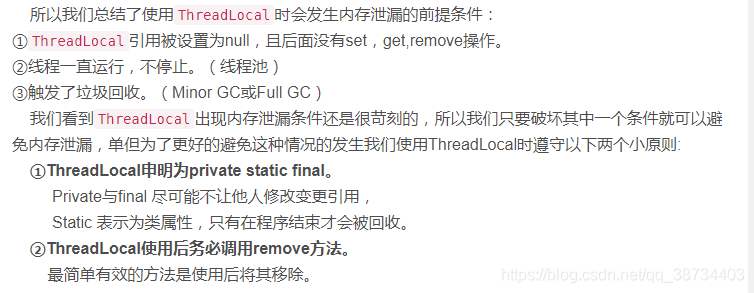
public class ThreadLocal<T> {static class ThreadLocalMap {static class Entry extends WeakReference<ThreadLocal<?>> {Object value;Entry(ThreadLocal<?> k, Object v) {super(k);value = v;}}.....

--内存泄漏解决:
在使用的最后用remove把值清空;
remove的源码很简单,找到对应的值全部置空,这样在垃圾回收器回收的时候,会自动把他们回收掉。ThreadLocal<String> localName = new ThreadLocal();try {localName.set("张三");……} finally {localName.remove();}
--key设计成弱引用的原因:
key不设置成弱引用的话就会造成和entry中value一样内存泄漏的场景。
另,ThreadLocal的不足,可以通过看看netty的fastThreadLocal来弥补3 使用场景
1)Spring实现事务隔离级别的源码
--Spring采用Threadlocal的方式,来保证单个线程中的数据库操作使用的是同一个数据库连接,同时,采用这种方式可以使业务层使用事务时不需要感知并管理connection对象,通过传播级别,巧妙地管理多个事务配置之间的切换,挂起和恢复。
--Spring框架里面就是用的ThreadLocal来实现这种隔离,主要是在TransactionSynchronizationManager这个类里面,代码如下所示:
(注:Spring的事务主要是ThreadLocal和AOP去做实现)private static final Log logger = LogFactory.getLog(TransactionSynchronizationManager.class);private static final ThreadLocal<Map<Object, Object>> resources =new NamedThreadLocal<>("Transactional resources");private static final ThreadLocal<Set<TransactionSynchronization>> synchronizations =new NamedThreadLocal<>("Transaction synchronizations");private static final ThreadLocal<String> currentTransactionName =new NamedThreadLocal<>("Current transaction name");……
- 2)SimpleDataFormat
--问题:上线后发现部分用户的日期居然不对;
--原因:使用SimpleDataFormat的parse()方法,内部有一个Calendar对象,调用SimpleDataFormat的parse()方法会先调用Calendar.clear(),然后调用Calendar.add(),如果一个线程先调用了add()然后另一个线程又调用了clear(),这时候parse()方法解析的时间就不对了。
--解决:
可以每个线程都new 一个自己的 SimpleDataFormat就好了,但是1000个线程难道new1000个SimpleDataFormat?
使用了线程池加上ThreadLocal包装SimpleDataFormat,再调用initialValue让每个线程有一个SimpleDataFormat的副本,从而解决了线程安全的问题,也提高了性能。
3)其他
--很多场景的cookie,session等数据隔离都是通过ThreadLocal去做实现
--Android中,Looper类就是利用了ThreadLocal的特性,保证每个线程只存在一个Looper对象。
--比如hibernate 中通过 threadLocal 管理 Session就是一个典型的案例,不同的请求线程(用户)拥有自己的 session,若将 session 共享出去被多线程访问,必然会带来线程安全问题。
ThreadLocalMap底层结构
1 ThreadLocalMap底层结构
--数据结构很像HashMap,但看源码并未实现Map接口;
--其Entry是继承WeakReference(弱引用)的,也没有HashMap中的next,所以也不存在链表。static class ThreadLocalMap {static class Entry extends WeakReference<ThreadLocal<?>> {Object value;Entry(ThreadLocal<?> k, Object v) {super(k);value = v;}}……}
1)使用数组
--因为,开发过程中可以一个线程可以有多个TreadLocal来存放不同类型的对象的,但是他们都将放到你当前线程的ThreadLocalMap里,所以肯定要数组来存。2 hash算法
1)hash算法:
int i = key.threadLocalHashCode & (len-1); //下标位置
2)斐波那契数/黄金分割数:
HASH_INCREMENT = 0x61c88647;
--hash计算因子;
--每当创建一个ThreadLocal对象,ThreadLocal.nextHashCode 这个值就会增长 0x61c88647;
--hash增量为 这个数字,带来的好处就是 hash 分布非常均匀。public class ThreadLocal<T> {// 哈希函数private final int threadLocalHashCode = nextHashCode(); //②private static AtomicInteger nextHashCode = new AtomicInteger();private static final int HASH_INCREMENT = 0x61c88647;private static int nextHashCode() { // ③return nextHashCode.getAndAdd(HASH_INCREMENT);}static class ThreadLocalMap {ThreadLocalMap(ThreadLocal<?> firstKey, Object firstValue) {table = new Entry[INITIAL_CAPACITY];// i就是当前key在散列表中对应的数组下标位置。int i = firstKey.threadLocalHashCode & (INITIAL_CAPACITY - 1); // ①table[i] = new Entry(firstKey, firstValue);size = 1;setThreshold(INITIAL_CAPACITY);}}}
- 3 哈希冲突
--概述:当插入一个数据,如果槽位已有数据,此时就会线性向后查找,一直找到Entry为null的槽位才会停止查找,将当前元素放入此槽位中。具体情况看后面;
--Entry:
绿色-正常数据
灰色-key为null,过期数据
白色-null 4 ThreadLocalMap.set()
set数据(新增或者更新数据)好几种hash情况:(图的方式解析了set()实现的原理)
1)情况一: 通过hash计算后的槽位对应的Entry数据为空:
--直接将数据放到该槽位:

2)情况二: 槽位数据不为空,key值与当前ThreadLocal通过hash计算获取的key值一致:
--直接更新该槽位的数据;

3)情况三: 槽位数据不为空,往后遍历过程中,在找到Entry为null的槽位之前,没有遇到key过期的Entry:
--遍历散列数组,线性往后查找:
① 如果找到Entry为null的槽位,则将数据放入该槽位中,
② 如果往后遍历过程中,遇到了key值相等的数据,直接更新即可。

4)情况四:槽位数据不为空,往后遍历,找到Entry为null的槽位之前,遇到key过期的Entry:
第一步:
--往后遍历过程中,到了index=7的槽位数据Entry的key=null:

1> 情况4.1:向后遍历过程,找到相同key值的Entry数据:
第二步
--此时就会执行replaceStaleEntry()方法,该方法含义是替换过期数据的逻辑,以index=7位起点开始遍历,进行探测式数据清理工作。
--初始化探测式清理过期数据扫描的开始位置:slotToExpunge = staleSlot = 7
--以当前staleSlot开始 向前迭代查找,找其他过期的数据,然后更新过期数据起始扫描下标slotToExpunge。for循环迭代,直到碰到Entry为null结束。
--如果找到了过期的数据,继续向前迭代,直到遇到Entry=null的槽位才停止迭代,如下图所示,slotToExpunge被更新为0:
--以当前节点(index=7)向前迭代,检测是否有过期的Entry数据,如果有则更新slotToExpunge值。碰到null则结束探测。以上图为例slotToExpunge被更新为0。
--上面向前迭代的操作是为了更新探测清理过期数据的起始下标slotToExpunge(15前向)的值,这个值在后面会讲解,它是用来判断当前过期槽位staleSlot之前是否还有过期元素。

第三步:
--接着开始以staleSlot位置(index=7)向后迭代,如果找到了相同key值的Entry数据:
tips:23

第四步:
--从当前节点staleSlot(7)向后查找key值相等的Entry元素,找到相同的(23)后更新Entry的值(27)并交换staleSlot元素的位置(27的值交换到7)(staleSlot位置为过期元素 7),更新Entry数据,然后开始进行过期Entry的清理工作,如下图所示:

1> 情况4.2:向后遍历过程中,如果没有找到相同key值的Entry数据:
第三步:
--从当前节点staleSlot(7)向后查找key值相等的Entry元素,直到Entry为null则停止寻找。通过上图可知,此时table中没有key值相同的Entry。

第四步:
创建新的Entry,替换table[stableSlot]位置:

清理:替换完成后也是进行过期元素清理工作,清理工作主要是有两个方法:expungeStaleEntry()和cleanSomeSlots()5 set()源码
private void set(ThreadLocal<?> key, Object value) {Entry[] tab = table;int len = tab.length;int i = key.threadLocalHashCode & (len-1);for (Entry e = tab[i];e != null;e = tab[i = nextIndex(i, len)]) {`ThreadLocal`<?> k = e.get();if (k == key) {e.value = value;return;}if (k == null) { //无效entryreplaceStaleEntry(key, value, i);return;}}tab[i] = new Entry(key, value);int sz = ++size;if (!cleanSomeSlots(i, sz) && sz >= threshold)rehash();}
1)下标
--计算:通过key来计算在散列表中的对应位置;
--使用:以当前key对应的桶的位置向后查找,找到可以使用的桶。
--可用的桶:
① k = key 说明是相等替换操作,可以使用
② 碰到一个过期的桶,执行替换逻辑,占用过期桶
③ 查找过程中,碰到桶中Entry=null的情况,直接使用Entry[] tab = table;int len = tab.length;int i = key.threadLocalHashCode & (len-1);
2)nextIndex()-遍历
--向后查找、向前查找private static int nextIndex(int i, int len) {return ((i + 1 < len) ? i + 1 : 0);}private static int prevIndex(int i, int len) {return ((i - 1 >= 0) ? i - 1 : len - 1);}
3)for循环
--如果key值对应的桶中Entry数据不为空
① 如果k = key,替换后直接返回
② 如果key = null,当前桶位置的Entry是过期数据,执行replaceStaleEntry()方法(核心方法),然后返回for (Entry e = tab[i];e != null;e = tab[i = nextIndex(i, len)]) {`ThreadLocal`<?> k = e.get();if (k == key) {e.value = value;return;}if (k == null) {replaceStaleEntry(key, value, i);return;}
3.1)replaceStaleEntry()--提供替换过期数据的功能
private void replaceStaleEntry(ThreadLocal<?> key, Object value,int staleSlot) {Entry[] tab = table;int len = tab.length;Entry e;int slotToExpunge = staleSlot;for (int i = prevIndex(staleSlot, len);(e = tab[i]) != null;i = prevIndex(i, len))if (e.get() == null)slotToExpunge = i;for (int i = nextIndex(staleSlot, len);(e = tab[i]) != null;i = nextIndex(i, len)) {`ThreadLocal`<?> k = e.get();if (k == key) {e.value = value;tab[i] = tab[staleSlot];tab[staleSlot] = e;if (slotToExpunge == staleSlot)slotToExpunge = i;cleanSomeSlots(expungeStaleEntry(slotToExpunge), len);return;}if (k == null && slotToExpunge == staleSlot)slotToExpunge = i;}tab[staleSlot].value = null;tab[staleSlot] = new Entry(key, value);if (slotToExpunge != staleSlot)cleanSomeSlots(expungeStaleEntry(slotToExpunge), len);}
1> 向前迭代 (向前,找到无效就记录下标)
--slotToExpunge:开始探测式清理过期数据的开始下标,默认从当前的staleSlot开始。
--for流程:
for循环一直碰到Entry为null结束;
当前staleSlot开始,向前迭代,找过期数据;
若找到过期数据,更新探测清理过期数据的开始下标为i,即slotToExpunge=ifor (int i = prevIndex(staleSlot, len);(e = tab[i]) != null;i = prevIndex(i, len)){if (e.get() == null){slotToExpunge = i;}}
2>向后迭代
--for流程:k==key (在找到null之前,先找到相同,替换,记录i)
-> 从staleSlot向后查找,也是碰到Entry为null的桶结束;
-> k==key,替换逻辑,替换新数据并且交换当前staleSlot位置;
此时,若slotToExpunge == staleSlot,这说明replaceStaleEntry()一开始向前查找过期数据时并未找到过期的Entry数据,接着向后查找过程中也未发现过期数据,修改开始探测式清理过期数据的下标为当前循环的index,即slotToExpunge = i。
-> 最后调用cleanSomeSlots(expungeStaleEntry(slotToExpunge), len);进行启发式过期数据清理。for(){if (k == key) {e.value = value;tab[i] = tab[staleSlot];tab[staleSlot] = e;if (slotToExpunge == staleSlot)slotToExpunge = i;cleanSomeSlots(expungeStaleEntry(slotToExpunge), len);return;}}
--for流程:k!=key (在找到null之前,不同,再找到无效,记录i)
-> k != key则会接着往下走:
k==null:当前遍历的Entry是一个过期数据;
slotToExpunge == staleSlot:一开始的向前查找数据并未找到过期的Entry。
-> 上2条件成立,则更新slotToExpunge为i,这个前提是前驱节点扫描时未发现过期数据。for(){if (k == key) {...}if (k == null && slotToExpunge == staleSlot)slotToExpunge = i;}
3>添加逻辑 (在找到null时,也未找到相同或无效,直接赋值)
--往后迭代的过程中如果没有找到k == key的数据,且碰到Entry为null的数据,则结束当前的迭代操作。
--说明:这里是一个添加的逻辑,将新的数据添加到table[staleSlot] 对应的slot中。tab[staleSlot].value = null;tab[staleSlot] = new Entry(key, value);
4>清理数据
除了staleSlot以外,还发现了其他过期的slot数据,就要开启清理数据的逻辑:if (slotToExpunge != staleSlot)cleanSomeSlots(expungeStaleEntry(slotToExpunge), len);
4)for结束
--for结束:说明向后迭代的过程中遇到了entry为null的情况:
-> 在Entry为null的桶中创建一个新的Entry对象
-> 执行++size操作
->启发式:调用cleanSomeSlots()做一次启发式清理工作,清理散列数组中Entry的key过期的数据
--->如果清理工作完成后,未清理到任何数据,且size超过了阈值(数组长度的2/3),进行rehash()操作
----->探测清理:rehash()中会先进行一轮探测式清理,清理过期key,清理完成后如果size >= threshold - threshold / 4,就会执行真正的扩容逻辑(扩容逻辑往后看)tab[i] = new Entry(key, value);int sz = ++size;if (!cleanSomeSlots(i, sz) && sz >= threshold)rehash();//---------------------------------private void rehash() {expungeStaleEntries();// Use lower threshold for doubling to avoid hysteresisif (size >= threshold - threshold / 4)resize();}
5)过期清理
ThreadLocalMap的两种过期key数据清理方式:探测式清理和启发式清理。
1>探测式清理:
--基本思路:
探测式清理,也就是expungeStaleEntry方法,遍历散列数组,从开始位置向后探测清理过期数据,将过期数据的Entry设置为null,沿途中碰到未过期的数据则将此数据rehash后重新在table数组中定位,如果定位的位置已经有了数据,则会将未过期的数据放到最靠近此位置的Entry=null的桶中,使rehash后的Entry数据距离正确的桶的位置更近一些。
--正常数据处理:
往后迭代检查,碰到正常数据,计算该数据位置是否偏移,如果被偏移,则重新计算slot位置,目的是让正常数据尽可能存放在正确位置或离正确位置更近的位置
--终止:
往后迭代的过程中碰到空的槽位,终止探测,这样一轮探测式清理工作就完成了private int expungeStaleEntry(int staleSlot) {Entry[] tab = table;int len = tab.length;tab[staleSlot].value = null;tab[staleSlot] = null;size--;Entry e;int i;for (i = nextIndex(staleSlot, len);(e = tab[i]) != null;i = nextIndex(i, len)) {`ThreadLocal`<?> k = e.get();if (k == null) {e.value = null;tab[i] = null;size--;} else {int h = k.threadLocalHashCode & (len - 1);if (h != i) {tab[i] = null;while (tab[h] != null)h = nextIndex(h, len);tab[h] = e;}}}return i;}
2>启发式清理:(cleanSomeSlots())
而启发式清理被作者定义为:Heuristically scan some cells looking for stale entries.
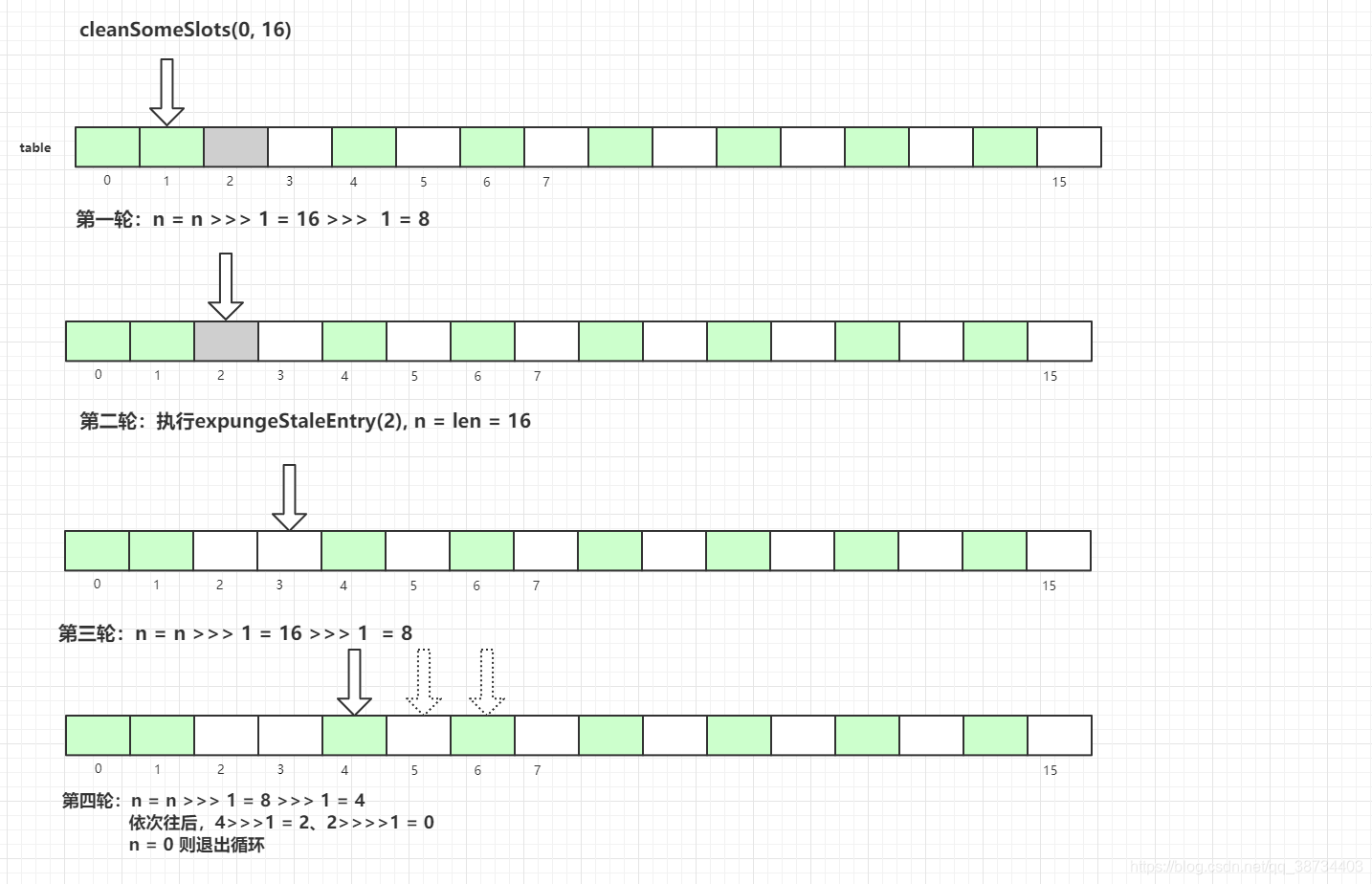
private boolean cleanSomeSlots(int i, int n) {boolean removed = false;Entry[] tab = table;int len = tab.length;do {i = nextIndex(i, len);Entry e = tab[i];if (e != null && e.get() == null) {n = len;removed = true;i = expungeStaleEntry(i);}} while ( (n >>>= 1) != 0);return removed;}
6 扩容机制
1)触发
--执行完启发式清理工作后,未清理到任何数据,且当前散列数组中Entry的数量已经达到了列表的扩容阈值(len*2/3),就开始执行rehash()`逻辑:if (!cleanSomeSlots(i, sz) && sz >= threshold)rehash();
2)rehash
--先是会进行探测式清理工作,从table的起始位置往后清理,流程看上面。
--清理完成之后,table中可能有一些key为null的Entry数据被清理掉,所以此时通过判断size >= threshold - threshold / 4 也就是size >= threshold* 3/4 来决定是否扩容。private void rehash() {expungeStaleEntries();if (size >= threshold - threshold / 4)resize();}private void expungeStaleEntries() {Entry[] tab = table;int len = tab.length;for (int j = 0; j < len; j++) {Entry e = tab[j];if (e != null && e.get() == null)expungeStaleEntry(j);}}
--注意:rehash和resize时机区别:
rehash()的阈值是size >= threshold,所以当面试官套路我们ThreadLocalMap扩容机制的时候 我们一定要说清楚这两个步骤:

3)resize()方法
--为了方便演示,我们以oldTab.len=8来举例:

--扩容后的tab的大小为oldLen * 2,然后遍历老的散列表,重新计算hash位置,然后放到新的tab数组中,如果出现hash冲突则往后寻找最近的entry为null的槽位,遍历完成之后,oldTab中所有的entry数据都已经放入到新的tab中了。重新计算tab下次扩容的阈值,具体代码如下:private void resize() {Entry[] oldTab = table;int oldLen = oldTab.length;int newLen = oldLen * 2;Entry[] newTab = new Entry[newLen];int count = 0;for (int j = 0; j < oldLen; ++j) {Entry e = oldTab[j];if (e != null) {`ThreadLocal`<?> k = e.get();if (k == null) {e.value = null;} else {int h = k.threadLocalHashCode & (newLen - 1);while (newTab[h] != null)h = nextIndex(h, newLen);newTab[h] = e;count++;}}}setThreshold(newLen);size = count;table = newTab;}
7 get源码
--get的时,也会根据ThreadLocal对象的hash值,定位到table中的位置,然后判断该位置Entry对象中的key是否和get的key一致,如果不一致,就判断下一个位置,set和get如果冲突严重的话,效率还是很低的。
1)第一种情况: 通过查找key值计算出散列表中slot位置,然后该slot位置中的Entry.key和查找的key一致,则直接返回:
2)第二种情况: slot位置中的Entry.key和要查找的key不一致:
继续往后迭代查找;遇到Entry.key=null,触发一次探测式数据回收操作,执行expungeStaleEntry()方法,执行完后,有些数据会被回收,有些数据都会前移,此时继续往后迭代,找到key值相等的Entry数据private Entry getEntry(ThreadLocal<?> key) {int i = key.threadLocalHashCode & (table.length - 1);Entry e = table[i];if (e != null && e.get() == key)return e;elsereturn getEntryAfterMiss(key, i, e);}private Entry getEntryAfterMiss(ThreadLocal<?> key, int i, Entry e) {Entry[] tab = table;int len = tab.length;// get的时候一样是根据ThreadLocal获取到table的i值,然后查找数据拿到后会对比key是否相等 if (e != null && e.get() == key)。while (e != null) {ThreadLocal<?> k = e.get();// 相等就直接返回,不相等就继续查找,找到相等位置。if (k == key)return e;if (k == null)expungeStaleEntry(i);elsei = nextIndex(i, len);e = tab[i];}return null;}
---------------ab------------
5)哈希冲突
private void set(ThreadLocal<?> key, Object value) {Entry[] tab = table;int len = tab.length;int i = key.threadLocalHashCode & (len-1);for (Entry e = tab[i];e != null;e = tab[i = nextIndex(i, len)]) {ThreadLocal<?> k = e.get();if (k == key) {e.value = value;return;}if (k == null) {replaceStaleEntry(key, value, i);return;}}tab[i] = new Entry(key, value);int sz = ++size;if (!cleanSomeSlots(i, sz) && sz >= threshold)rehash();}
--ThreadLocalMap在存储的时候会给每一个ThreadLocal对象一个threadLocalHashCode,在插入过程中,根据ThreadLocal对象的hash值,定位到table中的位置i,int i = key.threadLocalHashCode & (len-1)。
--情况1:
如果当前位置是空的,就初始化一个Entry对象放在位置i上;
if (k == null) {replaceStaleEntry(key, value, i);return;}
--情况2:
如果位置i不为空,如果这个Entry对象的key正好是即将设置的key,那么就刷新Entry中的value;
if (k == key) {e.value = value;return;}
--情况3:
如果位置i的不为空,而且key不等于entry,那就找下一个空位置,直到为空为止。
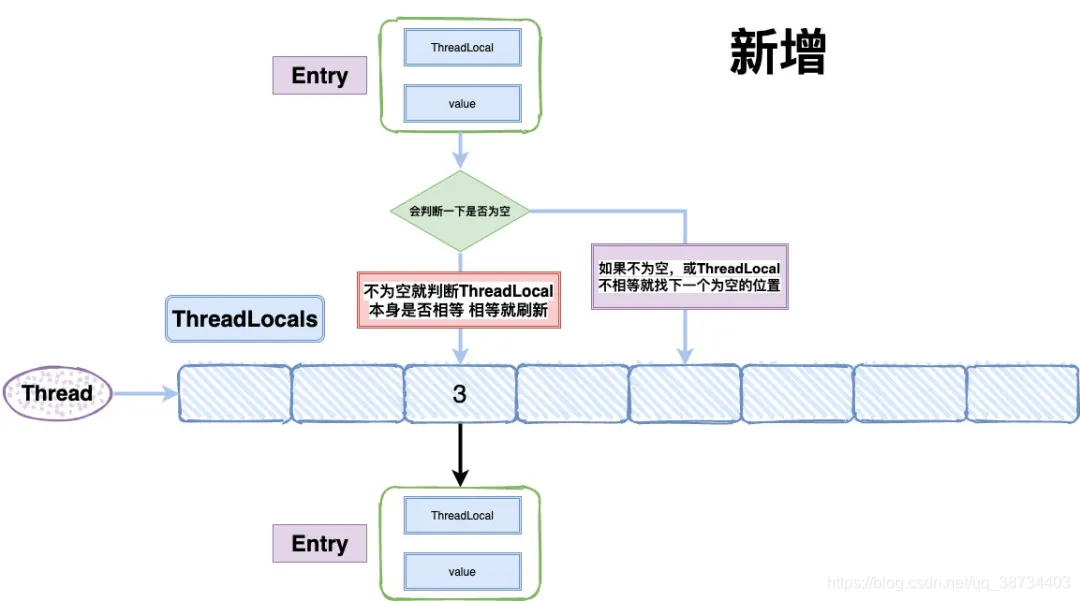
阻塞队列Queue
-
- 分类:
- Java 提供的线程安全的 Queue可以分为阻塞队列和非阻塞队列;
- 阻塞队列的典型例子是BlockingQueue,非阻塞队列的典型例子是 ConcurrentLinkedQueue,在实际应用中要根据实际需要选用阻塞队列或者非阻塞队列。
- 阻塞队列可以通过加锁来实现,非阻塞队列可以通过 CAS 操作实现。
ConcurrentLinkedQueue
- ConcurrentLinkedQueue
- ConcurrentLinkedQueue这个队列使用链表作为其数据结构.ConcurrentLinkedQueue 应该算是在高并发环境中性能最好的队列了。它之所有能有很好的性能,是因为其内部复杂的实现。
- ConcurrentLinkedQueue 主要使用 CAS 非阻塞算法来实现线程安全。
- ConcurrentLinkedQueue 适合在对性能要求相对较高,同时对队列的读写存在多个线程同时进行的场景,即如果对队列加锁的成本较高则适合使用无锁的 ConcurrentLinkedQueue 来替代。
BlockingQueue
阻塞队列知道吗?
- 1> 队列+阻塞队列
- 阻塞队列,顾名思义,首先是一个队列,而一个阻塞队列在数据结构中所起的作用大致如下图所示:
- 试图从空的阻塞队列中获取元素的线程将会被阻塞,直到其他的线程往空的队列插入新的元素。
试图往已满的阻塞队列中添加新元素的线程同样也会被阻塞,直到其他的线程从列中移除一个或者多个元素或者完全清空队列后使队列重新变得空闲起来并后序新增。
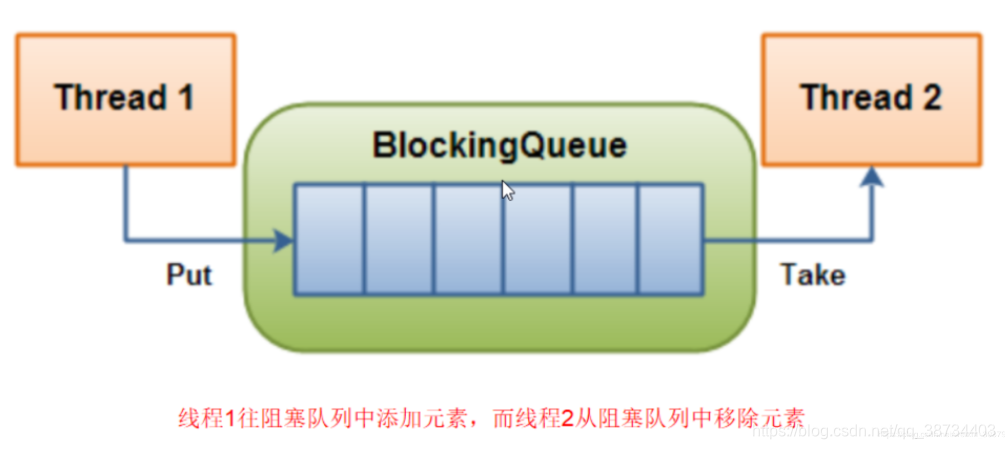
- 当阻塞队列为空时,从队列中获取元素的操作将会被阻塞。
- 当阻塞队列为满时,从队列里添加元素的操作将会被阻塞。
- 2> 为什么用?有什么好处?
- 在多线程领域:所谓阻塞,在某些情况下会挂起线程(阻塞),一旦条件满足,被挂起的线程又会自动被唤醒。
- 为什么需要BlockingQueue
好处是我们不需要关心什么时候需要阻塞线程,什么时候唤醒线程,因为这一切BlockingQueue都给你一手包办了。
- 3> BlockingQueue的核心方法
① ArrayBlockingQueue:是一个基于数组结构的有界阻塞队列,此队列按FIFO(先进先出)原则进行排序。
② LinkedBlockingQueue:一个基于链表结构的阻塞队列,此队列按FIFO(先进新出)排序元素,吞吐量通常要高于ArrayBlockingQueue。

③ SynchronousQueue:一个不存储元素的阻塞队列。每个插入操作必须等到另一个线程调用移除操作,否则插入操作一直处于阻塞状态,吞吐量通常要高于LinkedBlockingQueue。
-- SynchronousQueue没有容量
-- 与其他BlockingQueue不同,SynchronousQueue是一个不存储元素的BlockingQueue
-- 每一个put操作必须要等待一个take操作,否则不能继续添加元素,反之亦然。 - 4> 架构梳理+种类分析
1) 架构介绍
COllection-Queue-BlockingQueue
2) 种类分析
-- ArrayBlockingQueue: 由数组结构组成的有界阻塞队列。
-- LinkedBlockingQueue: 由链表结构组成的有界(但大小默认值为Integer.MAX_VALUE)阻塞队列。
-- PriorityBlockingQueue: 支持优先级排序的无界阻塞队列。
-- DelayQueue: 使用优先级队列实现的延迟无界阻塞队列。
-- SynchronousQueue: 不存储元素的阻塞队列,也即单个元素的队列。
-- LinkedTransferQueue: 由链表结构组成无界阻塞队列。
-- LinkedBlockingDque: 由链表结构组成的双向阻塞队列。 - 5> 用在哪里
① 生产者消费者模式
1)传统版 - 2.0版生产者消费者:sync、wait、notify => lock、await、singal
- 多线程创判断while
2)阻塞队列版
代码44:https://blog.csdn.net/weixin_39879073/article/details/93379162
② 线程池
③ 消息中间件
- 1> 队列+阻塞队列
如何设计一个消息队列
消息队列的作用
使用过哪些任务队列?
1)线程池-ArrayBlockingQueue
单线程的实现
3种线程实现的3种方式?
1)通过继承Thread类,重写run方法;
2)通过实现runable接口;
3)通过实现callable接口。(和Future)
④ 线程池获取:ThreadPoolExecutorpublic class CreateThreadDemo {public static void main(String[] args) {//1.继承ThreadThread thread = new Thread() {@Overridepublic void run() {System.out.println("继承Thread");super.run();}};thread.start();//2.实现runable接口Thread thread1 = new Thread(new Runnable() {@Overridepublic void run() {System.out.println("实现runable接口");}});thread1.start();//3.实现callable接口ExecutorService service = Executors.newSingleThreadExecutor();Future<String> future = service.submit(new Callable() {@Overridepublic String call() throws Exception {return "通过实现Callable接口";}});try {String result = future.get();System.out.println(result);} catch (InterruptedException e) {e.printStackTrace();} catch (ExecutionException e) {e.printStackTrace();}}}
继承Thread和实现Runnable接口的区别,这两者的继承关系
--实现:通过继承Thread类,重写Thread的run()方法,将线程运行的逻辑放在其中;通过实现Runnable接口,实例化Thread类
--如果一个类继承Thread,则不适合资源共享。但是如果实现了Runable接口的话,则很容易的实现资源共享。继承Thread是多个线程分别完成自己的任务,实现了Runable是多个线程共同完成一个任务。
实现Runnable接口比继承Thread类所具有的优势:
1)适合多个相同的程序代码的线程去处理同一个资源
2)Java只能单继承,可以避免java中的单继承的限制
3)增加程序的健壮性,代码可以被多个线程共享,代码和数据独立,
4) 如果只想重写 run() 方法,而不重写其他 Thread 方法,那么应使用 Runnable 接口
https://www.cnblogs.com/CryOnMyShoulder/p/8028122.htmlCallable和Runnable的区别?
- Runnable vs Callable
-- Runnable自 Java 1.0 以来一直存在,但Callable仅在 Java 1.5中引入,目的就是为了来处理Runnable不支持的用例。
-- Runnable 接口不会返回结果或抛出检查异常,但是Callable接口可以。所以,如果任务不需要返回结果或抛出异常推荐使用 Runnable 接口,这样代码看起来会更加简洁。 工具类 Executors 可以实现 Runnable 对象和 Callable对象之间的相互转换。(Executors.callable(Runnable task)或 Executors.callable(Runnable task,Object resule))。
// ① Runnable.java@FunctionalInterfacepublic interface Runnable {/** 被线程执行,没有返回值也无法抛出异常*/public abstract void run();}// ② Callable.java@FunctionalInterfacepublic interface Callable<V> {/**计算结果,或在无法这样做时抛出异常。* @return 计算得出的结果 @throws 如果无法计算结果,则抛出异常*/V call() throws Exception;}
- 创建线程的方式:延伸至优劣,底层实现
优劣
采用继承Thread类方式:
(1)优点:编写简单,如果需要访问当前线程,无需使用Thread.currentThread()方法,直接使用this,即可获得当前线程。
(2)缺点:因为线程类已经继承了Thread类,所以不能再继承其他的父类。
采用实现Runnable接口方式:
(1)优点:线程类只是实现了Runable接口,还可以继承其他的类。在这种方式下,可以多个线程共享同一个目标对象,所以非常适合多个相同线程来处理同一份资源的情况,从而可以将CPU代码和数据分开,形成清晰的模型,较好地体现了面向对象的思想。
(2)缺点:编程稍微复杂,如果需要访问当前线程,必须使用Thread.currentThread()方法。
https://blog.csdn.net/Touch_2011/article/details/6891026- run和start的区别
- 调用start方法实现多线程,而调用run方法没有实现多线程
- 一般会在run实现方法体,
- run还是在主线程中执行,会和调用普通方法一样,按照顺序执行,不会进入run里的代码块。
- start方法,则会在主线程中重新创建一个新的线程,等得到cpu的时间段后则会执行所对应的run方法体的代码。
https://blog.csdn.net/QQ2899349953/article/details/81772104
线程池
为什么用线程池,优势 (sxt2)
- 预备知识
例子:原(一个cpu):一个小丑玩4个球;现(多个cpu):4个小丑每人一个
cpu核数:Runtime.getRuntime().avaliableProcessors()
省略了上下文的切换
(创建对象,仅仅是在JVM的堆里分配一块内存而已;而创建一个线程,却需要调用操作系统内核的API,然后操作系统要为线程分配一系列的资源,这个成本就很高了,所以线程是一个重量级的对象,应该避免频繁创建和销毁。) - 为什么 & 优势
线程池做的工作主要是控制运行的线程的数量,处理过程中将任务放入队列,然后再线程创建后启动这些任务,如果线程数量超过了最大数量,超出数量的线程排队等候,等其它线程执行完毕,再从队列中取出任务来执行。
他的主要特点为:线程复用、控制最大并发数,管理线程。
第一:降低资源消耗。通过重复利用已创建的线程降低线程创建和销毁造成的消耗。
第二:提高响应速度。当任务到达时,任务可以不需要等到线程创建就能立即执行。
第三:提高线程的可管理性。线程是稀缺资源,如果无限制的创建,不仅会消耗系统资源,还会降低系统的稳定性,使用线程池可以进行统一的分配,调优和监控。
- 预备知识
JVM如何查看运行的线程数量?
- 怎么控制两个线程交替执行
交替执行 - 银行转账多线程实现方法
谈谈你对多线程的理解?
1-Executor
- 1 框架



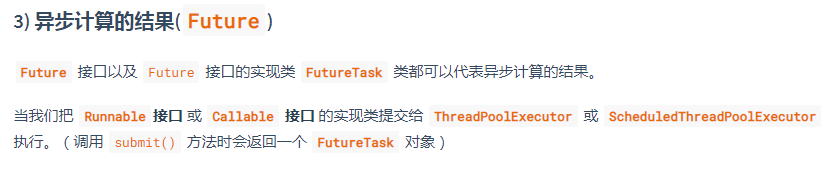
- 2 使用
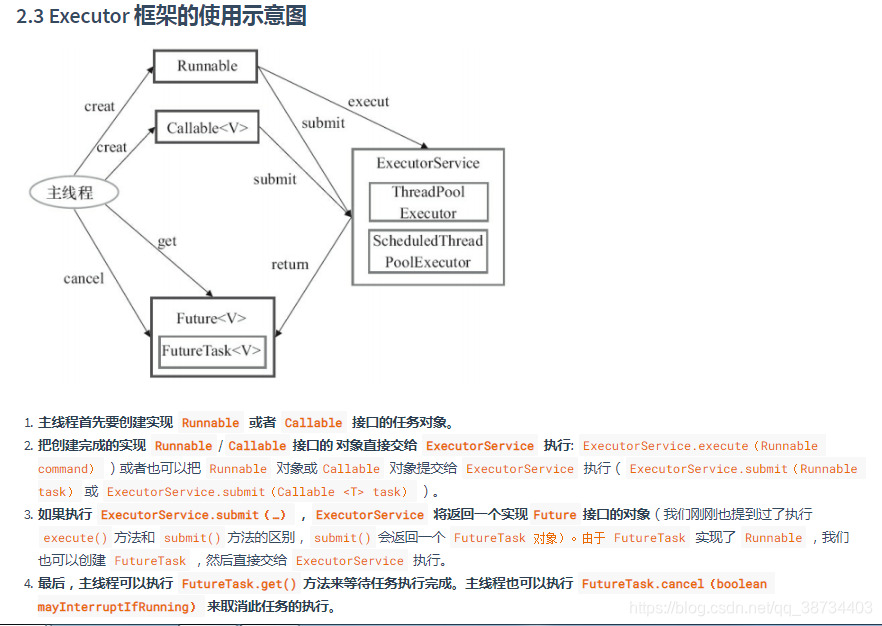
Excutor源码
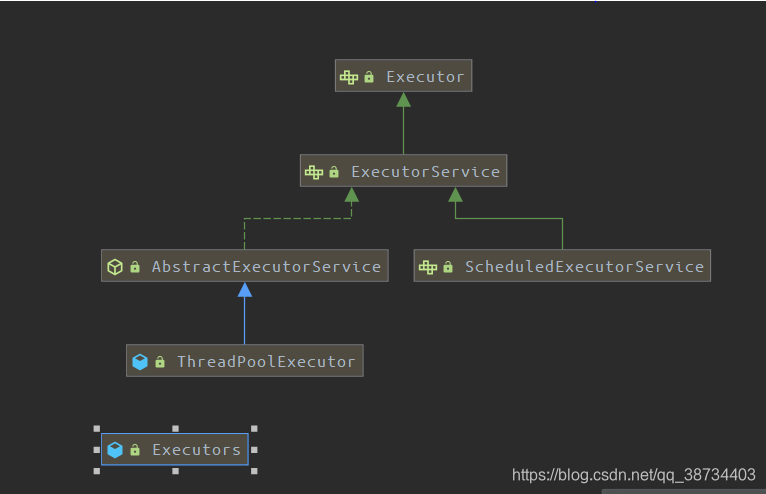
- Excutor接口
public interface Executor { //顶级接口Executor,定义了线程执行的方法void execute(Runnable command);}
ExecutorService
public interface ExecutorService extends Executor {
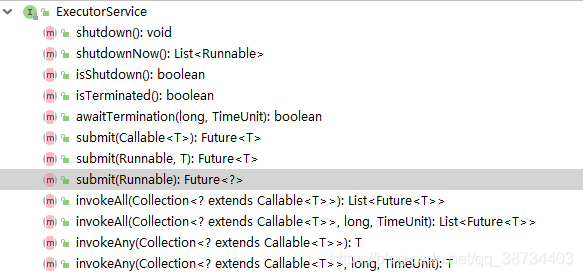
3个submit方法的介绍:参数不同
① 提交Runnable任务 submit(Runnable task):
这个方法的参数是一个Runnable接口,Runnable接口的run()方法是没有返回值的,所以 submit(Runnable task)这个方法返回的Future仅可以用来断言任务已经结束了,类似于Thread.join()。
② 提交Callable任务 submit(Callable task):
这个方法的参数是一个Callable接口,它只有一个call()方法,并且这个方法是有返回值的,所以这个方法返回的Future对象可以通过调用其get()方法来获取任务的执行结果。
③ 提交Runnable任务及结果引用submit(Runnable task, T result):
这个方法很有意思,假设这个方法返回的Future对象是f,f.get()的返回值就是传给submit()方法的参数result。方法③submit(Runnable task, T result)的用法?
--经典用法代码展示如下:
--注意:
Runnable接口的实现类Task声明了一个有参构造函数Task(Result r),创建Task对象的时候传入了result对象,这样就能在类Task的run()方法中对result进行各种操作了。result相当于主线程和子线程之间的桥梁,通过它主子线程可以共享数据。ExecutorService executor = Executors.newFixedThreadPool(1);// 创建Result对象rResult r = new Result();r.setAAA(a);// 提交任务Future<Result> future = executor.submit(new Task(r), r);Result fr = future.get();// 下面等式成立fr === r;fr.getAAA() === a;fr.getXXX() === xclass Task implements Runnable{Result r;//通过构造函数传入resultTask(Result r){this.r = r;}void run() {//可以操作resulta = r.getAAA();r.setXXX(x);}}
Future源码
- 源码解析
Future
public interface Future {

FutureTask
public class FutureTask implements RunnableFuture {

如何使用FutureTask?
FutureTask实现了Runnable和Future接口
① 实现了Runnable接口,可以将FutureTask对象作为任务提交给ThreadPoolExecutor去执行,也可以直接被Thread执行;
② 实现了Future接口,所以也能用来获得任务的执行结果。
示例代码①: 将FutureTask对象提交给ThreadPoolExecutor去执行。// 创建FutureTaskFutureTask<Integer> futureTask = new FutureTask<>(()-> 1+2);// 创建线程池ExecutorService es = Executors.newCachedThreadPool();// 提交FutureTaskes.submit(futureTask);// 获取计算结果Integer result = futureTask.get();
示例代码②:FutureTask对象直接被Thread执行的示例代码如下所示。
可以看出:利用FutureTask对象可以很容易获取子线程的执行结果。// 创建FutureTaskFutureTask<Integer> futureTask = new FutureTask<>(()-> 1+2);// 创建并启动线程Thread T1 = new Thread(futureTask);T1.start();// 获取计算结果Integer result = futureTask.get();
使用
实现最优的“烧水泡茶”程序?
- 数学家华罗庚先生的文章《统筹方法》,这篇文章里介绍了一个烧水泡茶的例子,文中提到最优的工序应该是下面这样:
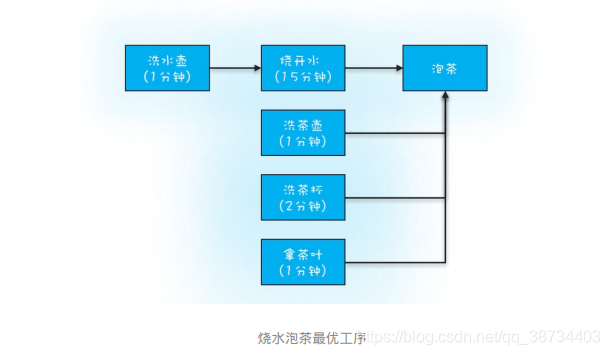
- 用程序来模拟一下这个最优工序。前面曾经提到,并发编程可以总结为三个核心问题:分工、同步和互斥。
- 编写并发程序,首先要做的就是分工.
所谓分工指的是如何高效地拆解任务并分配给线程。对于烧水泡茶这个程序,一种最优的分工方案可以是下图所示的这样:用两个线程T1和T2来完成烧水泡茶程序,T1负责洗水壶、烧开水、泡茶这三道工序,T2负责洗茶壶、洗茶杯、拿茶叶三道工序,其中T1
在执行泡茶这道工序时需要等待T2完成拿茶叶的工序。对于T1的这个等待动作,可以想出很多种办法,例如Thread.join()、CountDownLatch,甚至阻塞队列都可以解决,不过今天我们用Future特性来实现。
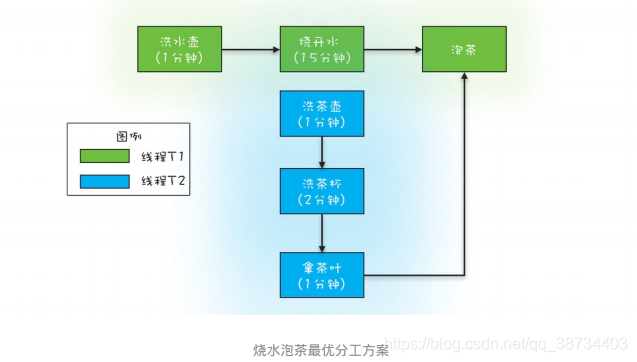
- 下面的示例代码就是用这一章提到的Future特性来实现的。
首先,我们创建了两个FutureTask——ft1和ft2,ft1完成洗水壶、烧开水、泡茶的任务,ft2完成洗茶壶、洗茶杯、拿茶叶的任务;这里需要注意的是ft1这个任务在执行泡茶任务前,需要等待ft2把茶叶拿来,所以ft1内部需要引用ft2,并在执行泡茶之前,调用
ft2的get()方法实现等待。
// 创建任务T2的FutureTaskFutureTask<String> ft2 = new FutureTask<>(new T2Task());// 创建任务T1的FutureTaskFutureTask<String> ft1 = new FutureTask<>(new T1Task(ft2));// 线程T1执行任务ft1Thread T1 = new Thread(ft1);T1.start();// 线程T2执行任务ft2Thread T2 = new Thread(ft2);T2.start();// 等待线程T1执行结果System.out.println(ft1.get());// T1Task需要执行的任务:// 洗水壶、烧开水、泡茶class T1Task implements Callable<String>{FutureTask<String> ft2;// T1任务需要T2任务的FutureTaskT1Task(FutureTask<String> ft2){this.ft2 = ft2;}@OverrideString call() throws Exception {System.out.println("T1:洗水壶...");TimeUnit.SECONDS.sleep(1);System.out.println("T1:烧开水...");TimeUnit.SECONDS.sleep(15);String tf = ft2.get(); // ★ 获取T2线程的茶叶System.out.println("T1:拿到茶叶:"+tf);System.out.println("T1:泡茶...");return "上茶:" + tf;}}// T2Task需要执行的任务:// 洗茶壶、洗茶杯、拿茶叶class T2Task implements Callable<String>{@OverrideString call() throws Exception{System.out.println("T2:洗茶壶...");TimeUnit.SECONDS.sleep(1);System.out.println("T2:洗茶杯...");TimeUnit.SECONDS.sleep(2);System.out.println("T2:拿茶叶...");TimeUnit.SECONDS.sleep(1);return "龙井";}}// 一次执行结果:T1:洗水壶...T2:洗茶壶...T1:烧开水...T2:洗茶杯...T2:拿茶叶...T1:拿到茶叶:龙井T1:泡茶...上茶:龙井
- 数学家华罗庚先生的文章《统筹方法》,这篇文章里介绍了一个烧水泡茶的例子,文中提到最优的工序应该是下面这样:
2-ThreadPoolExecutor的理解
参数
线程池的参数解释
- ThreadPoolExecutor类中提供的四个构造方法。
-- 其余三个如下构造方法的基础上产生(默认某些参数,如默认拒绝策略)
public ThreadPoolExecutor(int corePoolSize,int maximumPoolSize,long keepAliveTime,TimeUnit unit,BlockingQueue<Runnable> workQueue,ThreadFactory threadFactory,RejectedExecutionHandler handler) {if (corePoolSize < 0 ||maximumPoolSize <= 0 ||maximumPoolSize < corePoolSize ||keepAliveTime < 0)throw new IllegalArgumentException();if (workQueue == null || threadFactory == null || handler == null)throw new NullPointerException();this.acc = System.getSecurityManager() == null ?null :AccessController.getContext();this.corePoolSize = corePoolSize;this.maximumPoolSize = maximumPoolSize;this.workQueue = workQueue;this.keepAliveTime = unit.toNanos(keepAliveTime);this.threadFactory = threadFactory;this.handler = handler;}
- ThreadPoolExecutor类中提供的四个构造方法。
7大参数(sxt2)
1)corePoolSize:线程池中的常驻核心线程池数
2)maximumPoolSize:线程池能够容纳同时执行的最大线程数,此值必须大于等于1
3)keepAliveTime:多余的空闲线程的存活时间
当前线程池数量超过corePoolSize时,当空闲时间达到keepAliveTime值时,多余的空闲线程会被销毁直到只剩下corePoolSize个线程为止。
(注,只有当线程池中的线程数大于corePoolSize时才会起作用,直到线程池中的线程数不大于corePoolSize)
4)unit:keepAliveTime的单位。
5)workQueue:任务队列,被提交但尚未执行的任务。(相当于候客区)
用于保存任务的阻塞队列。可以使用ArrayBlockingQueue,LinkedBlockingQueue, SynchronousQueue, PriorityBlockingQueue。
6)threadFactory:表示生成线程池中工作线程的线程工厂,用于创建线程,一般默认的的即可。executor 创建新线程的时候会用到。
7)handler:拒绝策略,表示当队列满了并且工作线程大于等于线程池的最大线程数(maximumPoolSize)时如何来拒绝线程池的拒绝策略。
1) 是什么:等待队列也已经排满了,再也塞不下新任务了,同时,线程池中的max线程也达到了,无法继续为新任务服务。这时候就需要拒绝策略机制合理的处理这个问题。
2) 场景:线程池的任务缓存队列已满并且线程池中的线程数目达到maximumPoolSize时。
3) JDK内置的4种策略:
① ThreadPoolExecutor.AbortPolicy(默认):
丢弃所提交的任务并抛出RejectedExecutionException异常组织系统正常运行。
② ThreadPoolExecutor.DiscardPolicy:
丢弃任务,不做任何处理也不抛出异常。如果允许任务丢失,这是最好的一种方案。
③ ThreadPoolExecutor.DiscardOldestPolicy:
丢弃队列最前面的(即队列中等待最久的任务)任务,然后把当前被拒绝的任务加入队列重新提交。
④ ThreadPoolExecutor.CallerRunsPolicy:
由调用线程(提交任务的线程)处理该任务。"调用者运行"的一种调节机制,该策略既不会抛弃任务,也不会抛出异常,而是将某些任务回退到调用者,- 默认的拒绝策略从而降低新任务的流量。
4) 以上内置拒绝策略均实现了RejectedExecutionHanlder接口
- 默认的拒绝策略从而降低新任务的流量。
创建
多线程的实现方法/方式? |2
- 方式一:ThreadPoolExecutor构造函数实现

- 方式二:Executor框架的工具类Executors实现( 可以创建三种类型的 ThreadPoolExecutor):
FixedThreadPool
SingleThreadExecutor
CachedThreadPool
- 方式一:ThreadPoolExecutor构造函数实现
线程池用过吗?ThreadPoolExecutor谈谈你的理解? (sxt2)
1) 创建线程的方式
① 通过继承Thread类,重写run方法;
② 通过实现runable接口;class MyThread implements Runnable{@Overridepublic void run(){...}}
③ 通过实现Callable接口; - 现在常用
class MyThread implements Callable<Integer>{@Overridepublic Interger call() throws Exception{sout("Callable 实现。。。");return null; // 如,return 1024;}}
Runnable、Callable区别
- Runnable没有返回值,Callable有返回值
- Runnable不会抛异常,Callable会抛异常
- Runnable生成run方法,Callable生成call方法
创建
public class CallableDemo{psvm{//FutureTask(Callable<V> callbel)FutureTask<Interger> futureTask = new FutureTask<>(new Mythread());Thread t1 = new Thread(futureTask,“线程名称”);t1.start();sout(futureTask.get()); // 获得 1024返回值}}
分支合并(forkjoin
public class CallableDemo{psvm{ //两个线程,一个main主线程,一个是AAfutureTask//FutureTask(Callable<V> callbel)FutureTask<Interger> futureTask = new FutureTask<>(new Mythread());Thread t1 = new Thread(futureTask,“线程名称”);t1.start(); // 可合并为:new Thread(futureTask,“AA”).start();// new Thread(futureTask,“AA”).start(); //共用一个futureTask只计算一次,可以再newint result01 = 100;//while(!futureTask.isDone()){ //如果没计算完,折中//}int result02 = futureTask.get(); // get()方法建议放在最后// 要求获得Callable线程的计算记过,如果没有计算完成就要去强求,会导致堵塞,直到计算完成。sout(result01 + result02); // 1124}}
④ 线程池
ThreadPoolExecutor创建线程池
- Runnable+ThreadPoolExecutor
代码中模拟了 10 个任务,我们配置的核心线程数为 5 、等待队列容量为 100 ,所以每次只可能存在 5 个任务同时执行,剩下的5个任务会被放到等待队列中去。当前的5个任务中如果有任务被执行完了,线程池就会去拿新的任务执行。
① 创建一个 Runnable 接口的实现类
/** 一个简单的Runnable类,需要大约5秒钟来执行其任务。*/public class MyRunnable implements Runnable {private String command;public MyRunnable(String s) {this.command = s;}@Overridepublic void run() {System.out.println(Thread.currentThread().getName() + " Start. Time = " + new Date());processCommand();System.out.println(Thread.currentThread().getName() + " End. Time = " + new Date());}private void processCommand() {try {Thread.sleep(5000);} catch (InterruptedException e) {e.printStackTrace();}}@Overridepublic String toString() {return this.command;}}
② 测试程序,ThreadPoolExecutor 构造函数自定义参数创建线程池。
public class ThreadPoolExecutorDemo {private static final int CORE_POOL_SIZE = 5;private static final int MAX_POOL_SIZE = 10;private static final int QUEUE_CAPACITY = 100;private static final Long KEEP_ALIVE_TIME = 1L;public static void main(String[] args) {//通过ThreadPoolExecutor构造函数自定义参数创建ThreadPoolExecutor executor = new ThreadPoolExecutor(CORE_POOL_SIZE,MAX_POOL_SIZE,KEEP_ALIVE_TIME,TimeUnit.SECONDS,new ArrayBlockingQueue<>(QUEUE_CAPACITY),new ThreadPoolExecutor.CallerRunsPolicy());// 创建10个for (int i = 0; i < 10; i++) {//创建WorkerThread对象(WorkerThread类实现了Runnable 接口)Runnable worker = new MyRunnable("" + i);//执行Runnableexecutor.execute(worker);}//终止线程池executor.shutdown();while (!executor.isTerminated()) {}System.out.println("Finished all threads");}}
- Callable+ThreadPoolExecutor
/** ① MyCallable.java */public class MyCallable implements Callable<String> {@Overridepublic String call() throws Exception {Thread.sleep(1000);//返回执行当前 Callable 的线程名字return Thread.currentThread().getName();}}/** ② CallableDemo.java */public class CallableDemo {public static void main(String[] args) {//通过ThreadPoolExecutor构造函数自定义参数创建ThreadPoolExecutor executor = new ThreadPoolExecutor(5,10,1L,TimeUnit.SECONDS,new ArrayBlockingQueue<>(100),new ThreadPoolExecutor.CallerRunsPolicy());List<Future<String>> futureList = new ArrayList<>();Callable<String> callable = new MyCallable();for (int i = 0; i < 10; i++) {//提交任务到线程池Future<String> future = executor.submit(callable);//将返回值 future 添加到 list,我们可以通过 future 获得执行 Callable 得到的返回值futureList.add(future);}for (Future<String> fut : futureList) {try {System.out.println(new Date() + "::" + fut.get());} catch (InterruptedException | ExecutionException e) {e.printStackTrace();}}//关闭线程池executor.shutdown();}}
- Runnable+ThreadPoolExecutor
区别
- execute() vs submit()
execute()方法用于提交不需要返回值的任务,所以无法判断任务是否被线程池执行成功与否;
submit()方法用于提交需要返回值的任务。线程池会返回一个 Future类型的对象,通过这个 Future 对象可以判断任务是否执行成功 ,并且可以通过 Future 的 get()方法来获取返回值,get()方法会阻塞当前线程直到任务完成,而使用 get(long timeout,TimeUnit unit)方法则会阻塞当前线程一段时间后立即返回,这时候有可能任务没有执行完。
-- submit():
以AbstractExecutorService接口中的一个submit 方法为例子来看看源代码:
public Future<?> submit(Runnable task) {if (task == null) throw new NullPointerException();RunnableFuture<Void> ftask = newTaskFor(task, null);execute(ftask);return ftask;}// 上面方法调用的 newTaskFor 方法返回了一个 FutureTask 对象。protected <T> RunnableFuture<T> newTaskFor(Runnable runnable, T value) {return new FutureTask<T>(runnable, value);}
-- execute()方法:
public void execute(Runnable command) {...}
- isTerminated() VS isShutdown()
isShutDown 当调用 shutdown() 方法后返回为 true。
isTerminated 当调用 shutdown() 方法后,并且所有提交的任务完成后返回为 true
- execute() vs submit()
多线程相关:如何停止线程?
- 关闭线程池,可以通过shutdown和shutdownNow这两个方法。它们的原理都是遍历线程池中所有的线程,然后依次中断线程。shutdown和shutdownNow还是有不一样的地方:
-- shutdown只是将线程池的状态设置为SHUTDOWN状态,然后中断所有没有正在执行任务的线程,队列里的任务会执行完毕。
-- shutdownNow首先将线程池的状态设置为STOP,然后尝试停止所有的正在执行和未执行任务的线程,并返回等待执行任务的列表; - 看出 shutdown 方法会将正在执行的任务继续执行完,而 shutdownNow 会直接中断正在执行的任务。调用了这两个方法的任意一个,isShutdown方法都会返回 true,当所有的线程都关闭成功,才表示线程池成功关闭,这时调用isTerminated方法才会返回 true。
- 关闭线程池,可以通过shutdown和shutdownNow这两个方法。它们的原理都是遍历线程池中所有的线程,然后依次中断线程。shutdown和shutdownNow还是有不一样的地方:
原理
|源码|
完整的线程池执行的流程/任务提交流程?
当一个并发任务提交给线程池,线程池分配线程去执行任务的过程:

1) 先判断线程池中核心线程池所有的线程是否都在执行任务。如果不是,则新创建一个线程执行刚提交的任务,否则,核心线程池中所有的线程都在执行任务,则进入第 2 步;
2) 判断当前阻塞队列是否已满,如果未满,则将提交的任务放置在阻塞队列中;否则,则进入第 3 步;
3) 判断线程池中所有的线程是否都在执行任务,如果没有,则创建一个新的线程来执行任务,否则,则交给饱和策略进行处理
https://juejin.im/post/5aeec0106fb9a07ab379574f说说线程池的底层工作原理?(sxt2)
- 图为ThreadPoolExecutor的execute方法的执行示意图:

1) 在创建了线程池后,等待提交过来的任务请求
2) 当调用execute()方法添加一个请求任务时,线程池会做如下判断
2.1 如果正在运行的线程数量小于corePoolSize,那么马上创建线程运行这个任务
2.2 如果正在运行的线程数量大于或等于corePoolSize,那么将这个任务放入队列
2.3 如果这时候队列满了且正在运行的线程数量还小于maximumPoolSize,那么还是要创建非核心线程立刻运行这个任务
2.4 如果队列满了且正在运行的线程数量大于或等于maximumPoolSize,那么线程池会启动饱和拒绝策略来执行
3) 当一个线程完成任务时,它会从队列中取下一个任务来执行
4) 当一个线程无事可做超过一定的时间(keepAliveTime)时,线程池会判断
4.1 如果当前运行的线程数大于corePoolSize,那么这个线程就被停掉
4.2 所以线程池的所有任务完成后它最终会收缩到corePoolSize的大小 execute方法源码
RunnableDemo中使用 executor.execute(worker)来提交一个任务到线程池中// 存放线程池的运行状态 (runState) 和线程池内有效线程的数量 (workerCount)private final AtomicInteger ctl = new AtomicInteger(ctlOf(RUNNING, 0));private static int workerCountOf(int c) {return c & CAPACITY;}//任务队列private final BlockingQueue<Runnable> workQueue;public void execute(Runnable command) {// 如果任务为null,则抛出异常。if (command == null)throw new NullPointerException();// ctl 中保存的线程池当前的一些状态信息int c = ctl.get();// 下面会涉及到 3 步 操作// 1.首先判断当前线程池中之行的任务数量是否小于 corePoolSize// 如果小于的话,通过addWorker(command, true)新建一个线程,并将任务(command)添加到该线程中;然后,启动该线程从而执行任务。if (workerCountOf(c) < corePoolSize) {if (addWorker(command, true))return;c = ctl.get();}// 2.如果当前之行的任务数量大于等于 corePoolSize 的时候就会走到这里// 通过 isRunning 方法判断线程池状态,线程池处于 RUNNING 状态才会被并且队列可以加入任务,该任务才会被加入进去if (isRunning(c) && workQueue.offer(command)) {int recheck = ctl.get();// 再次获取线程池状态,如果线程池状态不是 RUNNING 状态就需要从任务队列中移除任务,并尝试判断线程是否全部执行完毕。同时执行拒绝策略。if (!isRunning(recheck) && remove(command))reject(command);// 如果当前线程池为空就新创建一个线程并执行。else if (workerCountOf(recheck) == 0)addWorker(null, false);}//3. 通过addWorker(command, false)新建一个线程,并将任务(command)添加到该线程中;然后,启动该线程从而执行任务。//如果addWorker(command, false)执行失败,则通过reject()执行相应的拒绝策略的内容。else if (!addWorker(command, false))reject(command);}
addWorker方法源码 这个方法主要用来创建新的工作线程,如果返回true说明创建和启动工作线程成功,否则的话返回的就是false。
// 全局锁,并发操作必备private final ReentrantLock mainLock = new ReentrantLock();// 跟踪线程池的最大大小,只有在持有全局锁mainLock的前提下才能访问此集合private int largestPoolSize;// 工作线程集合,存放线程池中所有的(活跃的)工作线程,只有在持有全局锁mainLock的前提下才能访问此集合private final HashSet<Worker> workers = new HashSet<>();//获取线程池状态private static int runStateOf(int c) { return c & ~CAPACITY; }//判断线程池的状态是否为 Runningprivate static boolean isRunning(int c) {return c < SHUTDOWN;}/*** 添加新的工作线程到线程池* @param firstTask 要执行* @param core参数为true的话表示使用线程池的基本大小,为false使用线程池最大大小* @return 添加成功就返回true否则返回false*/private boolean addWorker(Runnable firstTask, boolean core) {retry:for (;;) {//这两句用来获取线程池的状态int c = ctl.get();int rs = runStateOf(c);// Check if queue empty only if necessary.if (rs >= SHUTDOWN &&! (rs == SHUTDOWN &&firstTask == null &&! workQueue.isEmpty()))return false;for (;;) {//获取线程池中线程的数量int wc = workerCountOf(c);// core参数为true的话表明队列也满了,线程池大小变为 maximumPoolSizeif (wc >= CAPACITY ||wc >= (core ? corePoolSize : maximumPoolSize))return false;//原子操作将workcount的数量加1if (compareAndIncrementWorkerCount(c))break retry;// 如果线程的状态改变了就再次执行上述操作c = ctl.get();if (runStateOf(c) != rs)continue retry;// else CAS failed due to workerCount change; retry inner loop}}// 标记工作线程是否启动成功boolean workerStarted = false;// 标记工作线程是否创建成功boolean workerAdded = false;Worker w = null;try {w = new Worker(firstTask);final Thread t = w.thread;if (t != null) {// 加锁final ReentrantLock mainLock = this.mainLock;mainLock.lock();try {//获取线程池状态int rs = runStateOf(ctl.get());//rs < SHUTDOWN 如果线程池状态依然为RUNNING,并且线程的状态是存活的话,就会将工作线程添加到工作线程集合中//(rs=SHUTDOWN && firstTask == null)如果线程池状态小于STOP,也就是RUNNING或者SHUTDOWN状态下,同时传入的任务实例firstTask为null,则需要添加到工作线程集合和启动新的Worker// firstTask == null证明只新建线程而不执行任务if (rs < SHUTDOWN ||(rs == SHUTDOWN && firstTask == null)) {if (t.isAlive()) // precheck that t is startablethrow new IllegalThreadStateException();workers.add(w);//更新当前工作线程的最大容量int s = workers.size();if (s > largestPoolSize)largestPoolSize = s;// 工作线程是否启动成功workerAdded = true;}} finally {// 释放锁mainLock.unlock();}//// 如果成功添加工作线程,则调用Worker内部的线程实例t的Thread#start()方法启动真实的线程实例if (workerAdded) {t.start();/// 标记线程启动成功workerStarted = true;}}} finally {// 线程启动失败,需要从工作线程中移除对应的Workerif (! workerStarted)addWorkerFailed(w);}return workerStarted;}
- 图为ThreadPoolExecutor的execute方法的执行示意图:
线程池怎么保证线程一直运行的?
- 阻塞
- runWorker()->getTask()中:
Runnable r = timed ?workQueue.poll(keepAliveTime, TimeUnit.NANOSECONDS) :workQueue.take();if (r != null)return r;
--从阻塞任务队列中取任务,如果设置了allowCoreThreadTimeOut(true) 或者当前运行的任务数大于设置的核心线程数,那么timed =true 。此时将使用workQueue.poll(keepAliveTime, TimeUnit.NANOSECONDS)从任务队列中取任务,而如果没有设置,那么使用workQueue.take();取任务,对于阻塞队列,poll(long timeout, TimeUnit unit) 将会在规定的时间内去任务,如果没取到就返回null。take()会一直阻塞,等待任务的添加。线程池能够一直等待任务的执行而不被销毁了,其实也就是进入了阻塞状态而已。
- 线程池当未调用 shutdown 方法时,是通过队列的 take 方法(workQueue.take();)阻塞核心线程(Worker)的 run方法从而保证核心线程不被销毁的。队列中 take 方法的含义是当队列有任务时,立即返回队首任务,没有任务时则一直阻塞当前线程,直到有新任务才返回。
https://blog.csdn.net/smile_from_2015/article/details/105259789
种类
Execuors类实现的几种线程池类型,最后如何返回?
① newFixedThreadPool创建一个固定长线程池,可控制线程最大并发数,超出的线程会在队列中等待。
② newCachedThreadPool创建一个可缓存线程池,如果线程池长度超过处理需要,可灵活回收空闲线程,若无可回收,则新建线程。
③ newSingleThreadExecutor创建一个单线程化的线程池,它只会用唯一的工作线程来执行任务,保证所有任务按照指定顺序(FIFO, LIFO, 优先级)执行。
④ newScheduledThreadPool 创建一个固定长度线程池,支持定时及周期性任务执行。
线程池如何使用? (sxt2)
1) 架构说明
Java中的线程池是通过Executor框架实现的,该框架中用到了Executor,Executors(辅助工具类,如Arrays),ExecutorService,ThreadPoolExecutor(线程池的底层)这几个类。

2) 编码实现(共5种线程池)-第4中获得/使用Java多线程的方式,线程池
① 了解
-- Executors.newScheduledThreadPool()
池中任务每2'执行一次
-- Java8新出 Executors.newWorkStealingPool(int)
使用目前机器上可用的处理器作为它的并行级别(用的少,面试不怎么考)
② 重点public interface List<E> extends Collection<E> {public interface ExecutorService extends Executor {// 使用public class MyThreadPoolDemo{public static void main(String[] args) {ExecutorService threadPool = Executors.newFixedThreadPool(5);//一池5个处理线程// ExecutorService threadPool = Executors.newSingleThreadExecutor();//一池1个处理线程// ExecutorService threadPool = Executors.newCachedThreadPool();//一池N个处理线程// 模拟10个用户来办理业务,每个用户就是一个来自外部的请求线程try {for (int i = 0; i <10 ; i++) { //10个请求threadPool.execute(()->{ //LambdaSystem.out.println(Thread.currentThread().getName()+"\t 办理业务");});// TimeUnit.SECONDS.sleep(1);}}catch (Exception e){e.printStackTrace();}finally {threadPool.shutdown();//释放}}}
① Executors.newFixedThreadPool(int)
1)创建一个定长线程池,可控制线程最大并发数,超出的线程会在队列中等待。
2)newFixedThreadPool创建线程池CorePoolSize和maximumPoolSize值是相等的,使用的LinkedBlockingQueue。
适用:执行长期的任务,性能好很多。public static ExecutorService newFixedThreadPool(int nThreads) {return new ThreadPoolExecutor(nThreads, nThreads,0L, TimeUnit.MILLISECONDS,new LinkedBlockingQueue<Runnable>());}
- execute() 方法运行示意图(该图片来源:《Java 并发编程的艺术》):

1) 如果当前运行的线程数小于 corePoolSize,
2) 如果再来新任务的话,就创建新的线程来执行任务;
3) 当前运行的线程数等于 corePoolSize 后, 如果再来新任务的话,会将任务加入 LinkedBlockingQueue;
4)线程池中的线程执行完手头的任务后,会在循环中反复从 LinkedBlockingQueue 中获取任务来执行; - 为什么不推荐使用?
FixedThreadPool 使用无界队列 LinkedBlockingQueue(队列的容量为 Intger.MAX_VALUE)作为线程池的工作队列会对线程池带来如下影响 :
-- 当线程池中的线程数达到 corePoolSize 后,新任务将在无界队列中等待,因此线程池中的线程数不会超过 corePoolSize;
-- 由于使用无界队列时 maximumPoolSize 将是一个无效参数,因为不可能存在任务队列满的情况。所以,通过创建 FixedThreadPool的源码可以看出创建的 FixedThreadPool 的 corePoolSize 和 maximumPoolSize 被设置为同一个值。
-- 由于 1 和 2,使用无界队列时 keepAliveTime 将是一个无效参数;
-- 运行中的 FixedThreadPool(未执行 shutdown()或 shutdownNow())不会拒绝任务,在任务比较多的时候会导致 OOM(内存溢出)。
② Executors.newSingleThreadExecutor()
1> 创建一个单线程化的线程池,它只会用唯一的工作线程来执行任务,保证所有任务按照指定的顺序执行。
2> newSingleThreadExecutor将CorePoolSize和maximumPoolSize都设置为1,它使用的LinkedBlockingQueue。
适用:一个任务一个任务执行的场景。public static ExecutorService newSingleThreadExecutor() {return new FinalizableDelegatedExecutorService(new ThreadPoolExecutor(1, 1,0L, TimeUnit.MILLISECONDS,new LinkedBlockingQueue<Runnable>()));}
- 运行示意图(该图片来源:《Java 并发编程的艺术》):

1) 如果当前运行的线程数少于 corePoolSize,则创建一个新的线程执行任务;
2) 当前线程池中有一个运行的线程后,将任务加入 LinkedBlockingQueue
3) 线程执行完当前的任务后,会在循环中反复从LinkedBlockingQueue 中获取任务来执行; - 为什么不推荐使用?
无界队列LinkedBlockingQueue作为线程池的工作队列(队列的容量为Intger.MAX_VALUE)。SingleThreadExecutor 使用无界队列作为线程池的工作队列会对线程池带来的影响与FixedThreadPool相同。说简单点就是可能会导致 OOM,
单线程线程池newSingleThreadExecutor的应用场景
适用:一个任务一个任务执行的场景③ Executors.newCachedThreadPool()
1、创建一个可缓存线程池,如果线程池长度超过处理需求,可灵活回收线程池,若无可回收,则新建线程池。
2、将CorePoolSize设置为0,将maximumPoolSize设置为Interger.MAX_VALUE,即无界的,使用的SynchronousQueue,也就是说来了任务就创建线程运行,当线程空闲超过60秒,就销毁线程。
如果主线程提交任务的速度高于maximumPool中线程处理任务的速度时,CachedThreadPool 会不断创建新的线程。极端情况下,这样会导致耗尽 cpu 和内存资源。
适用:执行很多短期异步的小程序或者负载较轻的服务器。public static ExecutorService newCachedThreadPool() {return new ThreadPoolExecutor(0, Integer.MAX_VALUE,60L, TimeUnit.SECONDS,new SynchronousQueue<Runnable>());}

1> 首先执行 SynchronousQueue.offer(Runnable task) 提交任务到任务队列。如果当前 maximumPool中有闲线程正在执行SynchronousQueue.poll(keepAliveTime,TimeUnit.NANOSECONDS),那么主线程执行 offer 操作与空闲线程执行的 poll 操作配对成功,主线程把任务交给空闲线程执行,execute()方法执行完成,否则执行下面的步骤 2;
2> 当初始 maximumPool 为空,或者 maximumPool 中没有空闲线程时,将没有线程执行 SynchronousQueue.poll(keepAliveTime,TimeUnit.NANOSECONDS)。这种情况下,步骤 1 将失败,此时 CachedThreadPool 会创建新线程执行任务,execute 方法执行完成;- 为什么不推荐使用?
CachedThreadPool允许创建的线程数量为 Integer.MAX_VALUE,可能会创建大量线程,从而导致 OOM。
线程池 newCachedThreadPool线程池的缺点?配置参数?
如上④ Executors.ScheduledThreadPool()
- 主要用来在给定的延迟后运行任务,或者定期执行任务。
- 实际项目中基本不会被用到,因为有其他方案选择比如quartz。
备注: Quartz 是一个由 java 编写的任务调度库,由 OpenSymphony 组织开源出来。在实际项目开发中使用 Quartz 的还是居多,比较推荐使用 Quartz。因为 Quartz 理论上能够同时对上万个任务进行调度,拥有丰富的功能特性,包括任务调度、任务持久化、可集群化、插件等等。
线程池的好处
加快响应速度
合理利用CPU和内存
统一管理线程池适应应用的场合
-- 服务器接受到大量请求时,使用线程池技术时非常合适的,它可以大大减少线程的创建和销毁次数,提高服务器的工作效率
--实际上,在开发中,如果需要创建5个以上的线程,那么就可以使用线程池来管理。3种常见的队列类型
1)直接交换:SynchronousQueue
2)无界队列:LinkedBlockingQueue
3)有界队列:ArrayBlockingQueue线程池里的线程数量设定为多少比较合适?
-- CPU密集型(加密、计算hash等):最佳线程数为CPU核心数的1-2倍左右。
-- 耗时IO型(读写数据库、文件、网络读写等):最佳线程数一般会大于cpu核心数很多倍,以JVM线程监控显示繁忙情况为依据,保证线程空闲可以衔接上,参考Brain Goetz推荐的计算方法:线程数=CPU核心数*(1+平均等待时间/平均工作时间)
更详细可以进行压测
3-生产使用
|设计线程池|
4. java线程你是怎么使用的?
4. 线程池用的多吗?让你设计一个线程池如何设计
5. 如何构造线程池,它的参数,饱和策略?
你如何设置合理参数
你再工作中单一的/固定的/可变的三种创建线程池的方法,你用的哪个多?超级大坑(sxt2)
1) 正确答案:一个都不用,我们生产上只使用自定义的。
2) Executors中JDK已经给你提供了,为什么不用?- 阿里巴巴开发手册-并发处理
【强制】线程资源必须通过线程池提供,不允许在应用中自行显式创建线程。
说明:使用线程池的好处是减少在创建和销毁线程上所消耗的时间以及系统资源的开销,解决资源不足的问题。如果不使用线程池,有可能造成系统创建大量同类线程而导致消耗完内存或者“过度切换”的问题。
【强制】线程池不允许使用 Executors去创建,而是通过 ThreadPoolExecutor的方式,这样的处理方式让写同学更加明确线程池运行规则,避资源耗尽风险。
说明: Executors返回的线程池对象返回的线程池对象的弊端 如下 : 1)FixedThreadPool和 SingleThread允许的请求队列长度为 Integer.MAX_VALUE,可能会堆积大量的请求,从而导致 OOM。 2)CachedThreadPool和 ScheduledThreadPool允许的创建线程数量为Integer.MAX_VALUE,可能会创建大量的线程,从而导致OOM。 - 无界队列,导致OOM
- 阿里巴巴开发手册-并发处理
工作中如何使用线程池的,是否子定义过线程池的使用?(sxt2)
public static void main(String[] args) {ExecutorService threadPool = new ThreadPoolExecutor(2, //corePoolSize5,//maximumPoolSize1L,//keepAliveTimeTimeUnit.SECONDS,new LinkedBlockingDeque<Runnable>(3),Executors.defaultThreadFactory(),new ThreadPoolExecutor.AbortPolicy());// 银行开启最大8个窗口try {for (int i = 0; i <10 ; i++) { //10个请求threadPool.execute(()->{ //LambdaSystem.out.println(Thread.currentThread().getName()+"\t 办理业务");});}}catch (Exception e){e.printStackTrace();}finally {threadPool.shutdown();}}
合理配置线程池你是如何考虑的(sxt2)
1) 决定核心线程数两个方面:CUP密集型、IO密集型//第一步:先获取运行服务器是几核的System.out.println(Runtime.getRuntime().availableProcessors());
2) CPU密集
- CPU密集指该任务需要大量的运算,而没有阻塞,CPU一直在全速运行
- CPU密集任务只有在真正的多核CPU上才能得到加速(通过线程)
- 而在单核CPU上(基本没了),无论你开几个模拟多线程该任务都不可能得到加速,因为CPU总的运算能力就这些
- CPU密集型任务配置金肯呢个少的线程数量:CPU核数+1个线程的线程池
3) IO密集型(2种,第1种常被讲,实际应用看效果)
- (1)由于IO密集型任务线程并不是一直在执行任务,则配置尽可能多的线程,如CPU核数*2
- (2)IO密集型,即该任务需要大量IO,即有大量的阻塞
- 在单线程上运行IO密集型的任务会导致浪费大量的CPU运算能力浪费在等待。
- 索引在IO密集型任务中使用多线程可以大大的加速程序运行,及时在单核CPU上,这种加速主要就是利用了被浪费带哦的阻塞时间。
- IO密集型时,大部分线程都阻塞,故需要多配置线程数:
- 公式参考:CPU核数/1-阻塞系数 阻塞系数在0.8-0.9之间 ,可取0.9
- 如8核CPU 8/1-0.9=80个线程数
corepoolsize和CPU有什么关系,为什么书上推荐是N+1,线程池适合计算密集型还是IO密集型
- 如果任务是IO密集型,一般线程数需要设置2倍CPU数以上,以此来尽量利用CPU资源。
- 如果任务是CPU密集型,一般线程数量只需要设置CPU数加1即可,更多的线程数也只能增加上下文切换,不能增加CPU利用率。
IO密集型的任务,因为IO操作并不占用CPU,可以加大线程池中的线程数目,让CPU处理更多的业务
CPU密集型任务,线程池中的线程数设置得少一些,减少线程上下文的切换。
https://www.cnblogs.com/weigy/p/12667425.html - N+1:N表示N个cpu处理器,当计算密集型的线程偶尔由于页缺失故障或者其他原因而暂停时,这个“额外”的线程也能确保CPU的时钟周期不会被浪费。-p141
任务性质不同的任务可以用不同规模的线程池分开处理。 - CPU 密集型任务配置尽可能少的线程数量,如配置Ncpu+1个线程的线程池。
- IO 密集型任务则由于需要等待 IO 操作,线程并不是一直在执行任务,则配置尽可能多的线程,如2xNcpu。
- 混合型的任务,如果可以拆分,则将其拆分成一个 CPU 密集型任务和一个 IO 密集型任务,只要这两个任务执行的时间相差不是太大,那么分解后执行的吞吐率要高于串行执行的吞吐率,如果这两个任务执行时间相差太大,则没必要进行分解。
- 可以通过Runtime.getRuntime().availableProcessors()方法获得当前设备的 CPU 个数。
https://juejin.im/post/5aeec0106fb9a07ab379574f
https://www.cnblogs.com/weigy/p/12667425.html
4-skynet使用
1-创建设置
public class ThreadPoolUtil {private static int corePoolSize = 4;private static int maximumPoolSize = 32;private static long keepAliveTime = 60;private static TimeUnit unit = TimeUnit.SECONDS;private static int maximumTask = 5000;private static AtomicInteger tid = new AtomicInteger();private static final ThreadPoolExecutor executor = new ThreadPoolExecutor(corePoolSize, maximumPoolSize, keepAliveTime,unit, new ArrayBlockingQueue<>(maximumTask), r -> new Thread(r,"skynet-pool-" + tid.incrementAndGet()), new ThreadPoolExecutor.AbortPolicy());public static Future<?> submit(Runnable r) {return executor.submit(r);}public static <T> Future<T> submit(Callable<T> task) {return executor.submit(task);}public static void main(String[] args) throws InterruptedException {Runnable runnable = new Runnable() {@Overridepublic void run() {System.out.println(1000);}};submit(runnable);TimeUnit.SECONDS.sleep(3);}}
2-使用
代码段2:
//不阻塞返回回调结果ThreadPoolUtil.submit(() -> {//2. 解析data// 找到该任务id 更新查询状态//3.推送消息// 创建任务相关消息// 保存到消息表// 监听接口:通过套接字、监听消息异步通知(发布到redis)String topic = RedisWsMessageListener.TOPIC_SKYNET_WS_MSG;String msg = JSON.toJSONString(message);log.info("推送的消息msg:{},写入topic:{},", msg, topic);//发布到redisredisTemplate.convertAndSend(topic, msg);}});
3-jvm
笔记_S
21.运行时数据区
私有:程序计数器 Java虚拟机栈 本地方法栈
共享:堆 方法区
** 类加载
作用:
-加载类信息 放在 方法区
加载->连接(验证->准备->解析)->初始化
-加载:
类的全限定名->二进制字节流
字节流的静态存储结构->方法区的运行时数据结构
生成.Class对象->各种数据访问入口
-连接:
-验证:
符合要求,文件格式、元数据、字节码、符号引用
-准备:
类变量-方法区(除实例变量-堆)
分配内存与初始值
-解析
符号引用->直接引用
针对:类/接口、字段、类方法、接口方法、方法类型等(在常量池中)
-初始化
执行类构造器方法()过程
** 类加载器
模型:
启动类加载器/引导类
扩展类
应用程序/系统类
自定义
向父类委托
启动类加载
父类无法完成,子类加载
** 运行时数据区
方法区:
类信息(类加载的)
运行时常量池信息
字符串字面量和数字常量(class文件中常量池部分的内存映射)
(? 即时编译器编译后的代码缓存等)
程序计数器
程序控制流指示器,是个计数器
作用:存储下一条指令的地址
每个线程都有自己的
给字节码解释器提供下一条执行指令
唯一无oom
存储反编译后的指令地址(理解:类似于行号),对应操作指令
Java栈:
线程创建->栈创建,内部保存栈帧
一个方法对应一个栈帧的入栈和出栈
包含方法的局部变量(8基本数据类型,对象的引用地址)、部分结果
-Xss
-Xss1024k 最大256kb
方法两种返回/栈帧弹出 return和异常
栈帧->基本单位存储,存储方法执行的各种数据
-结构:
-局部变量表:
存方法参数和方法体中的局部变量
含基本数据类型、对象引用、返回值类型
方法执行时,jvm使用局部变量表->参数值到参数变量列表的传递
存储单位slot(变量槽)
32位以内的类型只占用一个slot(包括 引用类型、returnAddress类型),64位的类型(long和double)占用两个slot
构造器、实例方法中,对象引用this 都会存放在索引为0的位置
slot重复使用
-操作栈:
变量临时存储空间
后进先出,由字节码指令(pc计数器),进出数据
-动态连接(或指向运行时常量池的方法引用)
栈帧->包含指向运行时常量池中该栈帧所属方法的引用
Java源文件->编译->字节码文件,变量和方法引用->作为符号引用->存在class文件的常量池里
符号引用=>直接引用:通过静态链接|动态链接
-方法返回地址:
存 调用该方法的pc寄存器的值
-一些附加信息
如,对程序调试提供支持的信息
本地方法栈:
native
作用:管理本地方法的调用
堆:
还可以划分线程私有的缓冲区(TLAB)
存储:对象和数组
几乎所有对象实例?有一些对象在栈上分配(逃逸分析、标量替换)
-Xms10m -Xmx10m 堆内存
堆:新生区、老年区、永久区(1.8元空间)
新生-Eden、survivor
-Xms 初始 = -XX:InitialHeapSize
-Xmx 最大 = -XX:MaxHeapSize
老年/新生 占比 -XX:NewRatio = 4
Eden/survivor -XX:SurvivorRatio
Eden 满了MinorGC ,survivor大对象进入老年代
年龄:-XX:MaxTenuringThreshold=N
养老区内存不足 MajorGC 依旧 OOM
部分收集Partial GC
-新生代 MinorGC/YoungGC
-- 会发生STW
-老年代 MajorGC/OldGC -- CMS
--STW更久,最少伴随一次Minor
-混合收集 MixedGC
-- 整个新生代和部分老年代--只有G1
整堆收集FullGC 整Java堆和方法区
--触发:① System.gc() ② 老年代空间不足③ 方法区空间不足④Minor后进入老年代的avg大于年老代可用内存⑤to过小,对象进入老年代,但老年代空间不足
优化:
避免FullGC,缩短STW
分->优化GC性能
** 内存分配策略/对象提升(promotion)规则
-不同年龄对象分配原则
-优先Eden
-大对象 老年代
-长期存活 老年代
-survivor同年纪和大于survivor一半
-空间分配担保 Minor后,survivor无法容纳,进入老年代 -XX:HandlePromotionFailure 是否允许担保
** TLAB
-堆中,每个线程独占,在Eden,线程安全,提升内存分配吞吐量
-XX:TLABWasteTargetPercent 占Eden的百分比
** 逃逸分析技术
-对象逃逸方法失败,栈上分配 无需回收
-标量-无法分解的更小数据,如Java中的原始类型
-逃逸分析,对象不会被外界分配,JIT优化,将对象拆解成若干变量过程,标量替换-好处,不需要分配内存了,减少堆内存占用
-默认打开 -XX:+ElimilnateAllocations
-Hotspot 标量替换 实现 逃逸分析
** 方法区
主要是Class
Person person = new Person();
方法区 Java栈 Java堆
.class
Person 类的 .class 信息存放在方法区中
person 变量存放在 Java 栈的局部变量表中
真正的 person 对象存放在 Java 堆中
堆的逻辑部分,独立于堆的内存空间
类只加载一次
- OOM:定义太多类,方法区溢出
eg:加载大量三方jar包|tomcat部署工程较多(30-50)|大量动态的生成反射类
- 演进:
永久代:更易导致Java程序oom(超过-XX:MaxPermsize上限)
元空间永久代区别:元空间不在虚拟机设置的内存中,使用本地内存
-大小
JDK7永久代:
-XX:Permsize 初始分配空间 mr:20.75M
-XX:MaxPermsize 最大可分配空间 32位机器64M,64位-82M
JDK8元空间:
-XX:MetaspaceSize mr:win 21M
超过 FullGC触发并卸载没用的类(这些类对应类加载器不再存活) 值重置 新界限
-XX:MaxMetaspaceSize mr:-1 无限制
查看:
jinfo -flag MetaspaceSize PID
jinfo -flag MaxMetaspaceSize PID
弊端:mr虚拟机会耗尽所有可用系统内存
- 解决oom
-通过内存映像分析工具对dump的堆转储快照进行分析
-内存中的对象是否必要?即区分内存泄漏还是内存溢出
内存泄漏:大量引用指向某些不会使用的对象,这些对象还和GCROOT关联不会被回收
- 工具查看泄漏对象到GCROOT的引用链。查看为什么不会回收,类信息,找到泄漏代码位置
内存溢出:内存中的对象还都必须存活
-检查虚拟机堆参数(-Xmx与-Xms),调整大小,检查某些对象生命周期过长?持有状态时间过长?减少程序运行期内的内存消耗
方法区内部结构:
-存储内容:
已被jvm加载的类型信息
常量
静态变量
即时编译器编译后的代码缓存等
-结构
类型信息、运行时常量池、静态变量、JIT代码缓存、域信息、方法信息
-- 类型信息:
-- 域信息
-- 方法信息
-- 运行时常量池
https://www.cnblogs.com/tiancai/p/9321338.html
方法区-运行时常量池
Class字节码文件-常量池
- 常量池:
字节码文件包含:类的版本、字段、方法、接口等描述符信息、
及常量池(各种字面量和对类型、域、方法的符号引用)
字面量:文本字符串
被声明为final的常量值
基本数据类型的值
其他
符号引用:类和结构的完全限定名
字段名称和描述符
方法名称和描述符
- 为什么用它
不使用常量池,类信息、方法信息等要记录在当前字节码文件,文件过大,需要的结构信息记录在常量池,通过引用的方式加载、调用所需结构
- 有什么?
数量值、字符串值、类引用、字段引用、方法引用
- 常量池,可以看做是一张表,虚拟机指令根据这张常量表找到要执行的类名、方法名、参数类型、字面量等信息
- 运行时常量池:
方法区的一部分
常量池表-Class字节码文件的一部分,存放编译期生成的各种字面量和符号引用,这部分内容将在类加载后放在方法区的运行时常量池中
演进:
1.7 8 6 运行时数据区的变动
1.6 永久区->方法区 静态变量
1.7 去永久区->方法区 字符串常量池、静态变量 放进了堆
1.8 元空间 ->方法区 存放类信息
字符串常量池、静态变量 还在堆
- jdk6
方法区(永久代):
类型信息、域信息、方法信息
JIT代码缓存、静态变量
运行时常量池[字符串常量池StringTable]
- jdk7:
类型信息、域信息、方法信息
JIT代码缓存
运行时常量池
堆:静态变量、StringTable
- jdk8:
无永久代,类型信息,字段,方法,常量保存在本地内存的元空间,但字符串常量池、静态变量仍然在堆中。
为什么使用元空间?
- 虚拟机融合
- 为永久代设置空间大小很难确定
动态加载类过多,OOM
- 对永久代调优困难
方法区的回收:常量池废弃的常量、不再用的类型
调优 为降低FullGC
方法区回收效果难以满意,尤其是类型的卸载、条件苛刻
为什么移动字符串常量池?
- 永久代回收效率低,FullGC触发 老年代空间不足、永久代不足
- 开发中大量字符串被创建,回收效率低,会导致永久代内存不足,放在堆里,能及时回收内存
静态变量放在哪?
-6 7 永久代 8 堆
- 静态变量对应的对象实体使用存在堆空间(只要是对象实例必然会在Java堆中分配)
方法区类回收?
总结?
MinorGC 新生区
MajorGC 老年区
FullGC 整个堆和方法区
** 对象
创建对象?
- new
- clone()
-
步骤?
1判断对象对应的类是否加载、连接、初始化
-new指令
-检查指令参数能否在元空间的常量池中定位到一个类的符号引用,
-检查这个符号引用代表的类是否被加载、解析、初始化 即类元数据是否存在
-未加载,双亲委派模式下,类加载器以ClassLoader+包名+类名为key查找.class文件,未找到,异常,找到,类加载
2为对象分配内存
-内存规整 -> 指针碰撞
-不规整 -> 空闲列表分配
指针碰撞:
用过的一边,空闲的一边,中间指针为分界点指示器,挪动对象大小
空闲列表:
jvm维护列表,记录哪些可用,给对象分配足够空间,更新表
-堆规整?->由采用的垃圾收集器是否带有压缩功能决定,如标记清除 会有很多内存碎片
3处理并发安全问题
-cas+重试失败、区域加锁保证更新的原子性
-每个线程预先分配TLAB -XX:+/-UseTLAB参数设置(区域加锁机制)
-Eden区给给个线程分配一块区域
4初始化分配到的空间
所有属性设置默认值,保证对象实例字段在不赋值时可以直接使用
5设置对象的对象头
-对象所属类(即类的元数据信息)、对象hashCode、对象GC信息、锁信息等数据存储在对象的对象头
6执行init方法进行初始化
对象的内存布局?
1对象头
-运行时元数据(MarkWord)
哈希值(hashcode)
GC分代年龄
锁状态标志
线程持有锁
偏向线程ID
偏向时间戳
-类型指针
指向方法区中存放的类元信息 确定该对象所属类型
数组长度:对象是数组,还需记录数组长度
2实例数据
是对象真正存储的有效信息
3对齐填充
非必须 占位符作用
对象访问?
如何通过栈帧中的对象引用访问到其内部的对象实例?
-定位,通过栈上的reference访问
-句柄访问
优点:reference中存储稳定句柄地址,对象被移动(垃圾收集时移动对象很普遍)时只会改变句柄中实例数据指针即可,reference本身不需要被修改
缺点:在堆空间中开辟了一块空间作为句柄池,句柄池本身也会占用空间;通过两次指针访问才能访问到堆中的对象,效率低
-直接访问(Hotspot采用)
优点:直接指针是局部变量表中的引用,直接指向堆中的实例,在对象实例中有类型指针,指向的是方法区中的对象类型数据
缺点:对象被移动(垃圾收集时移动对象很普遍)时需要修改 reference 的值
** 垃圾回收器
HotSpot回收器?(连线可搭配)
Serial ParNew Parallel Scaveage
G1
CMS Serial Old(MSC) Parallel Old
-jdk8:mr:Parallel Scavenge、Parallel Old
Serial:
-分为Serial、SerialOld
-单线程 垃圾回收线程开始时,业务线程必须暂停
Serial-复制、SerialOld-标记压缩
ParNew:
-多线程
-多条垃圾回收线程并行工作,业务线程处于等待状态
-复制算法
ParallelScnvenge:
-多线程并行
-多条垃圾回收线程并行工作,业务线程处于等待状态
-复制算法
ParallelOld:
-ParallelScnvenge的老年代版本
-多线程 等待
-标记压缩
CMS:
-以获取最短回收停顿时间为目标的收集器
-多线程
垃圾线程和业务线程可以一起执行
-标记清除
-步骤:
初始标记-GCRoot能直接关联到的对象
并发标记-和业务并发
重新标记-修正并发标记期间的变动部分-不能和业务并发
并发清除
-并发标记问题:
1漏标-非垃圾对象后面引用消失,浮动垃圾 重新标记
2错标-垃圾对象后面又被引用
-解决:三色标记算法
漏标:CMS重新标记 A(黑)变成灰色
-CMS大bug
没有jdk版本默认CMS
并发标记漏标:remark阶段,必须从头扫描一遍
G1:
-面向服务端
-步骤:
初始标记
并发标记
最终标记
筛选回收
-优点:并行与并发、分代收集、空间整合、可预测停顿
4种引用
- |jvm3|引用及举例|
- 强软弱虚,强度依次逐渐减弱。
①强引用:只要强引用还存在,GC就永远不会收集被引用的对象。
类似“Object obj=new Object()”这种引用关系。
-回收: obj=null 帮助垃圾收集器回收此对象
②软引用:不占空间,gc不回收
-描述一些还有用,但非必须的对象。
-只被软引用关联着的对象,在系统将要发生内存溢出异常前,会把这些对象列进回收范围之中进行第二次回收,如果这次回收还没有足够的内存,才会抛出内存溢出异常。
-SoftReference类来实现软引用
-适实现缓存
如,网页缓存:浏览后的网页数据置为软引用
-可以和引用队列(ReferenceQueue)联合使用,软引用所引用对象被垃圾回收器回收,jvm把这个软引用加入到队列
③弱引用:WeakReference 调用gc直接回收 ★
-也是用来描述那些非必须对象,被弱引用关联的对象只能生存到下一次垃圾收集发生为止。
当垃圾收集器开始工作,无论当前内存是否足够,都会回收掉只被弱引用关联的对象。
-WeakReference类来实现弱引用。
-对象偶尔使用,并使用时能随时获取到,但不影响此对象的垃圾回收
④虚引用:PhantomReference -与队列结合使用
-一个对象是否有虚引用的存在,完全不会对其生存时间构成影响,也无法通过虚引用来取得一个对象实例。
-唯一作用:只是为了能在这个对象被收集器回收时收到一个系统通知。
-PhantomReference类来实现
安全点、安全区域
- jvm3
- 1 Stop The World
--概念:
如果移动存活对象,尤其是在老年代这种每次回收都有大量对象存活区域,移动存活对象并更新所有引用这些对象的地方将会是一种极为负重的操作,而且这种对象移动操作必须全程暂停用户应用程序才能进行,像这样的停顿被最初描述为“Stop The World”。 2 安全点
--1)概念:
当用户线程停顿下来之后,其实并不需要一个不漏地检查完所有执行上下文和全局的引用位置,虚拟机会在特定的位置记录下栈和寄存器里哪些位置是引用。这些特定位置被称为安全点(Safepoint)。
--2)选定:
安全点位置的选取基本上是以“是否具有让程序长时间执行的特征”为标准进行选定的,因为每条指令执行的时间都非常短暂,程序不太可能因为指令流长度太长这样的原因而长时间执行,“长时间执行”的最明显特征就是指令序列的复用,例如方法调用、循环跳转、异常跳转等都属于指令序列复用,所以只有具有这些功能的指令才会产生安全点。
--3)使用:
安全点的设定,也就决定了用户程序执行时并非在代码指令流的任意位置都能够停顿下来开始垃圾收集,而是强制要求必须执行到达安全点后才能够暂停。
--4)如何保证到达
如何在垃圾收集发生时让所有线程(这里其实不包括执行JNI调用的线程)都跑到最近的安全点,然后停顿下来?两种方案可供选择:
① 抢先式中断(PreemptiveSuspension)
抢先式中断不需要线程的执行代码主动去配合,在垃圾收集发生时,系统首先把所有用户线程全部中断,如果发现有用户线程中断的地方不在安全点上,就恢复这条线程执行,让它一会再重新中断,直到跑到安全点上。现在几乎没有虚拟机实现采用抢先式中断来暂停线程响应GC事件。
②主动式中断(VoluntarySuspension)
思想是当垃圾收集需要中断线程的时候,不直接对线程操作,仅仅简单地设置一个标志位,各个线程执行过程时会不停地主动去轮询这个标志,一旦发现中断标志为真时就自己在最近的安全点上主动中断挂起。轮询标志的地方和安全点是重合的,另外还要加上所有创建对象和其他需要在Java堆上分配内存的地方,这是为了检查是否即将要发生垃圾收集,避免没有足够内存分配新对象。3 安全区域
--安全点的问题:程序不执行
安全点机制保证了程序执行时,在不太长的时间内就会遇到可进入垃圾收集过程的安全点。但是,程序“不执行”的时候呢?
--解决:安全区域
--概念:
安全区域是指能够确保在某一段代码片段之中,引用关系不会发生变化,因此,在这个区域中任意地方开始垃圾收集都是安全的。也可以把安全区域看作被扩展拉伸了的安全点。
--使用:
当用户线程执行到安全区域里面的代码时,首先会标识自己已经进入了安全区域,那样当这段时间里虚拟机要发起垃圾收集时就不必去管这些已声明自己在安全区域内的线程了。当线程要离开安全区域时,它要检查虚拟机是否已经完成了根节点枚举(或者垃圾收集过程中其他需要暂停用户线程的阶段),如果完成了,那线程就当作没事发生过,继续执行;否则它就必须一直等待,直到收到可以离开安全区域的信号为止。
--程序不执行的概念:
程序不执行就是没有分配处理器时间,典型的场景便是用户线程处于Sleep状态或者Blocked状态,这时候线程无法响应虚拟机的中断请求,不能再走到安全的地方去中断挂起自己,虚拟机也显然不可能持续等待线程重新被激活分配处理器时间。
参数配置
0 项目参数配置
1)icreditb 82
java -XX:+PrintCommandLineFlags:
-XX:InitialHeapSize=62788032
-XX:MaxHeapSize=1004608512
-XX:+PrintCommandLineFlags
-XX:+UseCompressedClassPointers
-XX:+UseCompressedOops -XX:+UseParallelGC1 通用参数
- 1)-XX:+PrintGC
--作用:每GC一次打印一行日志
--显示:
GC前,堆空间使用量;
GC后,堆空间使用量;
当前可用的堆空间总和;
本次GC所花的时间。
--版本:
JDK9、JDK10默认使用G1作为垃圾回收器,使用参数-Xlog:gc来打印GC日志 2)-XX:+PrintGCDetails:获取更详细信息
--显示
新生代GC日志
老年代和永久区的使用情况
会使虚拟机在退出前打印堆的详细信息,详细信息描述了当前堆的各个区间的使用情况
--版本:
-Xlog:gc*:更详细 JDK9、JDK102 堆内存配置
-Xms 初始 = -XX:InitialHeapSize
-Xmx 最大 = -XX:MaxHeapSize
--当前总内存在-Xms和-Xmx之间,从-Xms开始根据需求向上增长;当前空闲内存为当前总内存减去当前已使用的空间;
--建议:
实际工作中,可以将初始堆-Xms与最大堆-Xmx设置为相等。好处是,可以减少程序运行时进行垃圾回收的次数,从而提高程序的性能。3 新生代老年代配置
-Xmn:设置新生代的大小,一般设置为整个堆空间的1/3到1/4。
-XX:NewRatio = 4 老年/新生 占比
-XX:SurvivorRatio=2新生代中eden/from|to区的比例
eden区与from区的比值为2∶1,故eden区为512KB。总可用新生代大小为512KB+256KB=768KB,新生代总大小为512KB+256KB+256KB=1024KB=1MB。
-XX:MaxTenuringThreshold=N 年龄
-XX:HandlePromotionFailure 是否允许担保
-XX:TLABWasteTargetPercent TLAB占Eden的百分比
-默认打开 -XX:+ElimilnateAllocations 默认打开逃逸分析技术,对象逃逸方法失败,栈上分配 无需回收3 非堆
1)栈内存
-Xss:栈内存大小
--可用的栈内存=进程最大内存-堆内存-方法区内存-程序计数器内存-虚拟机本身耗费内存
--操作系统分配给每个进程的内存是有限制的,譬如32位Windows的单个进程最大内存限制为2GB。HotSpot虚拟机提供了参数可以控制Java堆和方法区这两部分的内存的最大值,那剩余的内存即为2GB(操作系统限制)减去最大堆容量,再减去最大方法区容量,由于程序计数器消耗内存很小,可以忽略掉,如果把直接内存和虚拟机进程本身耗费的内存也去掉的话,剩下的内存就由虚拟机栈和本地方法栈来分配了。因此为每个线程分配到的栈内存越大,可以建立的线程数量自然就越少,建立线程时就越容易把剩下的内存耗尽,内存溢出。4 程序内存
程序占用
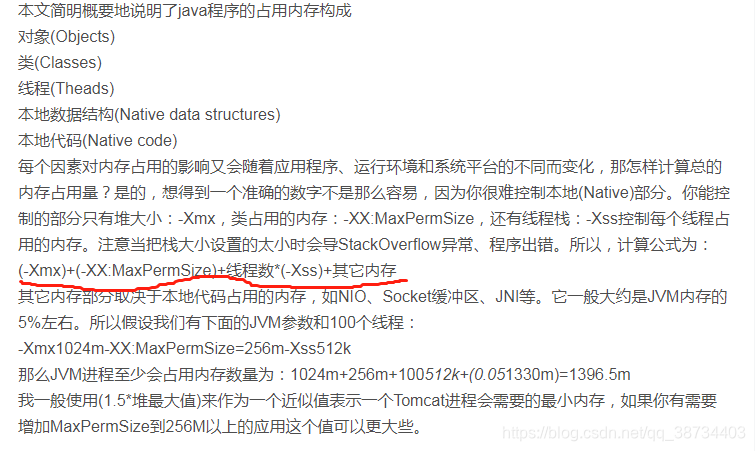
垃圾回收器
- 1 垃圾收集器概述
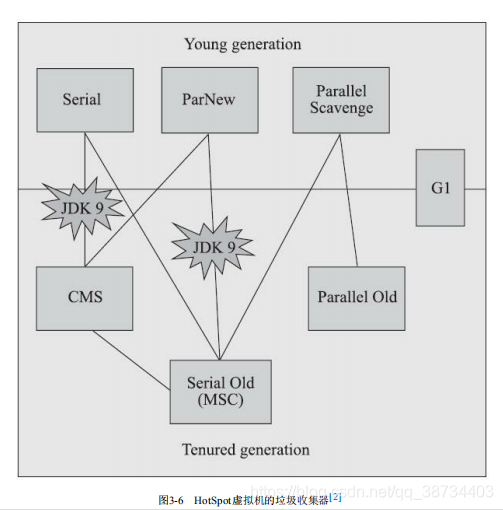
- 并行、并发
--并行(Parallel):并行描述的是多条垃圾收集器线程之间的关系,说明同一时间有多条这样的线程在协同工作,通常默认此时用户线程是处于等待状态。
--并发(Concurrent):并发描述的是垃圾收集器线程与用户线程之间的关系,说明同一时间垃圾收集器线程与用户线程都在运行。由于用户线程并未被冻结,所以程序仍然能响应服务请求,但由于垃圾收集器线程占用了一部分系统资源,此时应用程序的处理的吞吐量将受到一定影响。 - JDK1.8默认采用的垃圾回收器:Parallel Scavenge、Parallel Old
- JDK 9默认垃圾收集器G1
- 衡量垃圾收集器的三项最重要的指标是:内存占用(Footprint)、吞吐量(Throughput)和延迟
(Latency) 1 Serial收集器
1)单线程
单线程工作的收集器,不仅是使用一个处理器或一条收集线程去完成垃圾收集工作,更强调在进行垃圾收集时,必须暂停其他所有工作线程,“Stop The World”直到它收集结束。
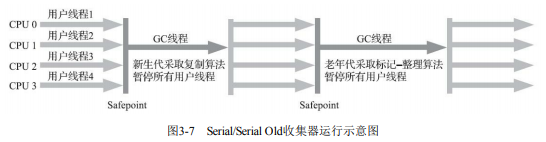
2)优缺点
--优:简单高效2 ParNew收集器
--ParNew收集器实质上是Serial收集器的多线程并行版本
--ParNew收集器除了支持多线程并行收集之外,其他与Serial收集器相比并没有太多创新之处
--ParNew是多线程并行的,也就是说当多条垃圾回收线程并行工作时,此时的业务线程处于等待状态
--除了Serial收集器外,目前只有它能与CMS收集器配合工作
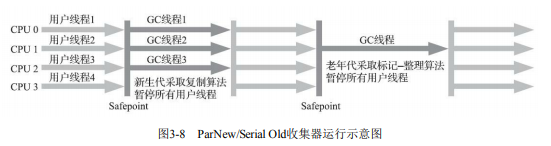
3 Parallel Scavenge收集器
--Parallel Scavenge 是一个年轻代的垃圾回收器,也就是说Parallel工作在年轻代
--Parallel Scavenge是多线程并行的,也就是说当多条垃圾回收线程并行工作时,此时的业务线程处于等待状态
--采用复制算法实现
--JDK1.8默认采用的垃圾回收器:Parallel Scavenge、Parallel Old
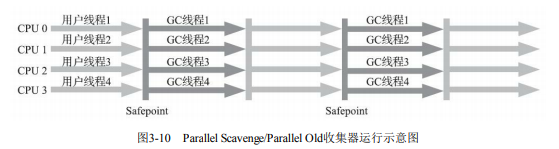
吞吐量
--Parallel Scavenge收集器的特点是它的关注点与其他收集器不同,CMS等收集器的关注点是尽可能
地缩短垃圾收集时用户线程的停顿时间,而Parallel Scavenge收集器的目标则是达到一个可控制的吞吐
量(Throughput)。
如果虚拟机完成某个任务,用户代码加上垃圾收集总共耗费了100分钟,其中垃圾收集花掉1分钟,那吞吐量就是99%。停
--参数控制:
器提供了两个参数用于精确控制吞吐量,分别是控制最大垃圾收集停顿时间的-XX:MaxGCPauseMillis参数以及直接设置吞吐量大小的-XX:GCTimeRatio参数。
----XX:MaxGCPauseMillis参数允许的值是一个大于0的毫秒数,收集器将尽力保证内存回收花费的
时间不超过用户设定值。
----XX:GCTimeRatio参数的值则应当是一个大于0小于100的整数,也就是垃圾收集时间占总时间的
比率,相当于吞吐量的倒数。
自适应调节策略
Parallel Scavenge收集器还有一个参数-XX:+UseAdaptiveSizePolicy值得我们关注。这是一
个开关参数,当这个参数被激活之后,就不需要人工指定新生代的大小(-Xmn)、Eden与Survivor区
的比例(-XX:SurvivorRatio)、晋升老年代对象大小(-XX:PretenureSizeThreshold)等细节参数
了,虚拟机会根据当前系统的运行情况收集性能监控信息,动态调整这些参数以提供最合适的停顿时
间或者最大的吞吐量。这种调节方式称为垃圾收集的自适应的调节策略(GC Ergonomics)4 Serial Old收集器
Serial Old是Serial收集器的老年代版本,它同样是一个单线程收集器,使用标记-整理算法。这个收
集器的主要意义也是供客户端模式下的HotSpot虚拟机使用。如果在服务端模式下,它也可能有两种用
途:一种是在JDK 5以及之前的版本中与Parallel Scavenge收集器搭配使用[1],另外一种就是作为CMS
收集器发生失败时的后备预案,在并发收集发生Concurrent Mode Failure时使用。
5 Parallel Old收集器
Parallel Old是Parallel Scavenge收集器的老年代版本,支持多线程并发收集,基于标记-整理算法实
现
Parallel Old收集器出现后,“吞吐量优先”收集器终于有了比较名副其实的搭配组合,在注重
吞吐量或者处理器资源较为稀缺的场合,都可以优先考虑Parallel Scavenge加Parallel Old收集器这个组
合。
6 CMS收集器
1. 概念
-- CMS(Concurrent Mark Sweep)收集器是一种以获取最短回收停顿时间为目标的收集器。
-- “Mark Sweep”,可以看出CMS收集器是基于标记-清除算法实现的。
-- -XX:+UseConcMarkSweepGC来开启CMS收集器- 2. 运作过程的四个步骤?
1)初始标记(CMS initial mark)
2)并发标记(CMS concurrent mark)
3)重新标记(CMS remark)
4)并发清除(CMS concurrent sweep)
-- 初始标记、重新标记:这两个步骤仍然需要“Stop The World”。
--初始标记:
仅仅只是标记一下GC Roots能直接关联到的对象,速度很快;
--并发标记:
就是从GC Roots的直接关联对象开始遍历整个对象图的过程,这个过程耗时较长但是不需要停顿用户线程,可以与垃圾收集线程一起并发运行;
--重新标记:
为修正并发标记期间,因用户程序继续运作而导致标记产生变动的那一部分对象的标记记录,这个阶段的停顿时间通常会比初始标记阶段稍长一些,但也远比并发标记阶段的时间短;
--并发清除:
清理删除掉标记阶段判断的已经死亡的对象,由于不需要移动存活对象,所以这个阶段也是可以与用户线程同时并发的。
3. 示意图
-- 整个过程中耗时最长的并发标记和并发清除阶段中,垃圾收集器线程都可以与用户线程一起工作,所以从总体上来说,CMS收集器的内存回收过程是与用户线程一起并发执行的。
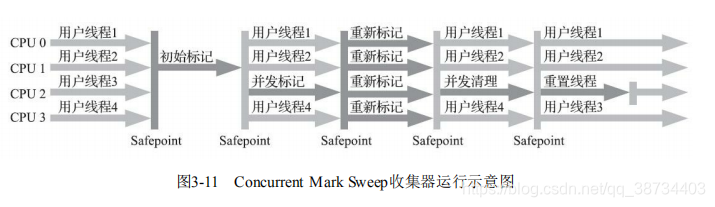
4. 优缺点
--优点:并发收集、低停顿。并发低停顿收集器”(Concurrent Low Pause Collector)
--缺点
1)CMS收集器对处理器资源非常敏感。
2)由于CMS收集器无法处理“浮动垃圾”(Floating Garbage),有可能出现“Con-current Mode Failure”失败进而导致另一次完全“Stop The World”的Full GC的产生。
3)CMS是一款基于“标记-清除”算法实现的收集器,收集结束时会有大量空间碎片产生。
5. 缺点引发问题及解决 - 1)CMS收集器对处理器资源非常敏感。
事实上,面向并发设计的程序都对处理器资源比较敏感。在并发阶段,它虽然不会导致用户线程停顿,但却会因为占用了一部分线程(或者说处理器的计算能力)而导致应用程序变慢,降低总吞吐量。CMS默认启动的回收线程数是(处理器核心数量+3)/4,也就是说,如果处理器核心数在四个或以上,并发回收时垃圾收集线程只占用不超过25%的 处理器运算资源,并且会随着处理器核心数量的增加而下降。但是当处理器核心数量不足四个时, CMS对用户程序的影响就可能变得很大。如果应用本来的处理器负载就很高,还要分出一半的运算能力去执行收集器线程,就可能导致用户程序的执行速度忽然大幅降低。为了缓解这种情况,虚拟机提供了一种称为“增量式并发收集器”(Incremental Concurrent Mark Sweep/i-CMS)的CMS收集器变种,所做的事情和以前单核处理器年代PC机操作系统靠抢占式多任务来模拟多核并行多任务的思想一样,是在并发标记、清理的时候让收集器线程、用户线程交替运行,尽量减少垃圾收集线程的独占资源的时间,这样整个垃圾收集的过程会更长,但对用户程序的影响就会显得较少一些,直观感受是速度变 慢的时间更多了,但速度下降幅度就没有那么明显。实践证明增量式的CMS收集器效果很一般,从 JDK 7开始,i-CMS模式已经被声明为“deprecated”,即已过时不再提倡用户使用,到JDK 9发布后i- CMS模式被完全废弃。 - 2)由于CMS收集器无法处理“浮动垃圾”(Floating Garbage),有可能出现“Con-current Mode Failure”失败进而导致另一次完全“Stop The World”的Full GC的产生。
在CMS的并发标记和并发清理阶段,用户线程是还在继续运行的,程序在运行自然就还会伴随有新的垃圾对象不断产生,但这一部分垃圾对象是出现在标记过程结束以后,CMS无法在当次收集中处理掉它们,只好留待下一次垃圾收集时再清理掉。这一部分垃圾就称为“浮动垃圾”。同样也是由于在垃圾收集阶段用户线程还需要持续运行,那就还需要预留足够内存空间提供给用户线程使用,因此CMS收集器不能像其他收集器那样等待到老年代几乎完全被填满了再进行收集,必须预留一部分空间供并发收集时的程序运作使用。在JDK 5的默认设置下,CMS收集器当老年代使用了68%的空间后就会被激活,这是一个偏保守的设置,如果在实际应用中老年代增长并不是太快,可以适当调高参数-XX:CMSInitiatingOccu-pancyFraction的值来提高CMS的触发百分比,降低内存回收频率,获取更好的性能。到了JDK6时,CMS收集器的启动阈值就已经默认提升至92%。但这又会更容易面临另一种风险:要是CMS运行期间预留的内存无法满足程序分配新对象的需要,就会出现一次“并发失败”(Concurrent Mode Failure),这时候虚拟机将不得不启动后备预案:冻结用户线程的执行,临时启用Serial Old收集器来重新进行老年代的垃圾收集, 但这样停顿时间就很长了。所以参数-XX:CMSInitiatingOccupancyFraction设置得太高将会很容易导致大量的并发失败产生,性能反而降低,用户应在生产环境中根据实际应用情况来权衡设置。 3)CMS是一款基于“标记-清除”算法实现的收集器,收集结束时会有大量空间碎片产生。
空间碎片过多时,将会给大对象分配带来很大麻烦,往往会出现老年代还有很多剩余空间,但就是无法找 到足够大的连续空间来分配当前对象,而不得不提前触发一次Full GC的情况。为了解决这个问题,CMS收集器提供了一个-XX:+UseCMS-CompactAtFullCollection开关参数(默认是开启的,此参数从 JDK9开始废弃),用于在CMS收集器不得不进行Full GC时开启内存碎片的合并整理过程,由于这个 内存整理必须移动存活对象,(在Shenandoah和ZGC出现前)是无法并发的。这样空间碎片问题是解 决了,但停顿时间又会变长,因此虚拟机设计者们还提供了另外一个参数-XX:CMSFullGCsBefore- Compaction(此参数从JDK9开始废弃),这个参数的作用是要求CMS收集器在执行过若干次(数量 由参数值决定)不整理空间的Full GC之后,下一次进入Full GC前会先进行碎片整理(默认值为0,表 示每次进入Full GC时都进行碎片整理)。7 G1收集器
1. Garbage First(简称G1)收集器概念
--开创了收集器面向局部收集的设计思路和基于Region(区域)的内存布局形式。
--全功能的垃圾收集器
--JDK 9,G1宣告取代Parallel Scavenge加Parallel Old组合,成为服务端模式下的默认垃圾收集器
--可以由用户指定期望的停顿时间
通常把期望停顿时间设置为一两百毫秒或者两三百毫秒会是比较合理的。
-- -XX:MaxGCPauseMillis参数指定的停顿时间
2. 区域划分
--实现:
G1不再坚持固定大小以及固定数量的分代区域划分,而是把连续的Java堆划分为多个大小相等的独立区域(Region),每一个Region都可以根据需要,扮演新生代的Eden空间、Survivor空间,或者老年代空间。收集器能够对扮演不同角色的Region采用不同的策略去处理。
--新生代和老年代不再是固定,它们都是一系列区域(不需要连续)的动态集合。
--Humongous区域:专门用来存储大对象。
G1认为只要大小超过了一个Region容量一半的对象即可判定为大对象。
每个Region的大小可以通过参数-XX:G1HeapRegionSize设定,取值范围为1MB~32MB,且应为2的N次幂。而对于那些超过了整个Region容量的超级大对象,将会被存放在N个连续的Humongous Region之中,G1的大多数行为都把Humongous Region作为老年代的一部分来进行看待。
3. 如何停顿
--为什么建立可预测的停顿时间模型?
因为它将Region作为单次回收的最小单元,即每次收集到的内存空间都是Region大小的整数倍,这样可以有计划地避免
在整个Java堆中进行全区域的垃圾收集。
--更具体的处理思路:
让G1收集器去跟踪各个Region里面的垃圾堆积的“价值”大小,价值即回收所获得的空间大小以及回收所需时间的经验值,然后在后台维护一个优先级列表,每次根据用户设定允许的收集停顿时间(使用参数-XX:MaxGCPauseMillis指定,默认值是200毫秒),优先处理回收价值收益最大的那些Region。这种使用Region划分内存空间,以及具有优先级的区域回收方式,保证了G1收集器在有限的时间内获取尽可能高的收集效率。
4. 问题解决
1)跨Region引用对象如何解决?
使用记忆集避免全堆作为GC Roots扫描:
但G1上记忆集的应用其实要复杂很多,每个Region都维护有自己的记忆集,这些记忆集会记录下别的Region指向自己的指针,并标记这些指针分别在哪些卡页的范围之内。
G1的记忆集在存储结构的本质上是一种哈希表,Key是别的Region的起始地址,Value是一个集合,里面存储的元素是卡表的索引号。这种“双向”的卡表结构(卡表是“我指向谁”,这种结构还记录了“谁指向我”)比原来的卡表实现起来更
复杂,同时由于Region数量比传统收集器的分代数量明显要多得多,因此G1收集器要比其他的传统垃圾收集器有着更高的内存占用负担。根据经验,G1至少要耗费大约相当于Java堆容量10%至20%的额外内存来维持收集器工作。
2)在并发标记阶段如何保证收集线程与用户线程互不干扰地运行?
①首先要解决的是用户线程改变对象引用关系时,必须保证其不能打破原本的对象图结构,导致标记结果出现错误:
CMS收集器采用增量更新算法实现,而G1收集器则是通过原始快照(SATB)算法来实现的。
②回收过程中新创建对象的内存分配上?
程序要继续运行就肯定会持续有新对象被创建,G1为每一个Region设计了两个名为TAMS(Top at Mark Start)的指针,把Region中的一部分空间划分出来用于并发回收过程中的新对象分配,并发回收时新分配的对象地址都必须要在这两个指针位置以上。G1收集器默认在这个地址以上的对象是被隐式标记过的,即默认它们是存活的,不纳入回收范围。与CMS中的“Concurrent Mode Failure”失败会导致Full GC类似,如果内存回收的速度赶不上内存分配的速度,
G1收集器也要被迫冻结用户线程执行,导致Full GC而产生长时间“Stop The World”。
3)怎样建立起可靠的停顿预测模型?用户通过-XX:MaxGCPauseMillis参数指定的停顿时间只意味着垃圾收集发生之前的期望值,但G1收集器要怎么做才能满足用户的期望呢?
--G1收集器的停顿预测模型是以衰减均值(Decaying Average)为理论基础来实现的,在垃圾收集过程中,G1收集器会记录每个Region的回收耗时、每个Region记忆集里的脏卡数量等各个可测量的步骤花费的成本,并分析得出平均值、标准偏差、置信度等统计信息。这里强调的“衰减平均值”是指它会比普通的平均值更容易受到新数据的影响,平均值代表整体平均状态,但衰减平均值更准确地代表“最近的”平均状态。换句话说,Region的统计状态越新越能决定其回收的价值。然后通过这些信息预测现在开始回收的话,由
哪些Region组成回收集才可以在不超过期望停顿时间的约束下获得最高的收益。
5. 运作过程4个步骤
1)初始标记(Initial Marking):仅仅只是标记一下GC Roots能直接关联到的对象,并且修改TAMS指针的值,让下一阶段用户线程并发运行时,能正确地在可用的Region中分配新对象。这个阶段需要停顿线程,但耗时很短,而且是借用进行Minor GC的时候同步完成的,所以G1收集器在这个阶段实际并没有额外的停顿。
2)并发标记(Concurrent Marking):从GC Root开始对堆中对象进行可达性分析,递归扫描整个堆里的对象图,找出要回收的对象,这阶段耗时较长,但可与用户程序并发执行。当对象图扫描完成以后,还要重新处理SATB记录下的在并发时有引用变动的对象。
3)最终标记(Final Marking):对用户线程做另一个短暂的暂停,用于处理并发阶段结束后仍遗留下来的最后那少量的SATB记录。
4)筛选回收(Live Data Counting and Evacuation):负责更新Region的统计数据,对各个Region的回收价值和成本进行排序,根据用户所期望的停顿时间来制定回收计划,可以自由选择任意多个Region构成回收集,然后把决定回收的那一部分Region的存活对象复制到空的Region中,再清理掉整个旧 Region的全部空间。这里的操作涉及存活对象的移动,是必须暂停用户线程,由多条收集器线程并行完成的。
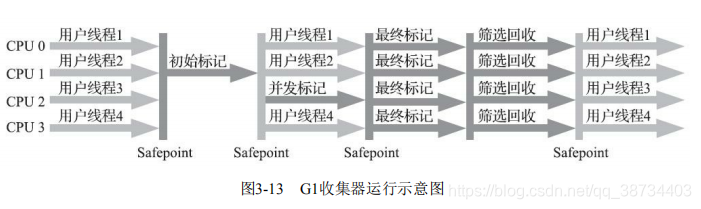
6. 优缺点
① 无限制。默认的停顿目标为两百毫秒,一般来说,回收阶段占到几十到一百甚至接近两百毫秒都很正常。
如果把停顿时间调得非常低,譬如设置为二十毫秒,很可能出现的结果就是由于停顿目标时间太短,导致每次选出来的回收集只占堆内存很小的一部分,收集器收集的速度逐渐跟不上分配器分配的速度,导致垃圾慢慢堆积。应用运行时间一长,最终占满堆引发Full GC反而降低性能,所以通常把期望停顿时间设置为一两百毫秒或者两三百毫秒会是比较合理的。
--优点:
① 可以指定最大停顿时间、分Region的内存布局、按收益动态确定回收集,
② G1从整体来看是基于“标记-整理”算法实现的收集器,但从局部(两个Region 之间)上看又是基于“标记-复制”算法实现,无论如何,这两种算法都意味着G1运作期间不会产生内存空间碎片,垃圾收集完成之后能提供规整的可用内存。
有利于程序长时间运行,在程序为大对象分配内存时不容易因无法找到连续内存空间而提前触发下一次收集。
--缺点:与cms相比
① 用户程序运行过程
中,G1无论是为了垃圾收集产生的内存占用(Footprint)还是程序运行时的额外执行负载
(Overload)都要比CMS要高。
② 然G1和CMS都使用卡表来处理跨代指针,但G1的卡表实现更为复杂,而且堆中每个Region,无论扮演的是新生代还是老年代角色,都必须有一份卡表,这导致G1的记忆集(和
其他内存消耗)可能会占整个堆容量的20%乃至更多的内存空间;相比起来CMS的卡表就相当简单,只有唯一一份,而且只需要处理老年代到新生代的引用,反过来则不需要,由于新生代的对象具有朝生夕灭的不稳定性,引用变化频繁,能省下这个区域的维护开销是很划算的。
③ 负载不同
譬如它们都使用到写屏障,CMS用写后屏障来更新维护卡表;而G1除了使用写后屏障来进行同样的(由于G1的卡表结构复杂,其实是更烦琐的)卡表维护操作外,为了实现原始快照搜索(SATB)算法,还需要使用写前屏障来跟踪并发时的指针变化情况。相比起增量更新算法,原始快照搜索能够减少并发标记和重新标记阶段的消耗,避免CMS那样在最终标记阶段停顿时间过长的缺点,但是在用户程序运行过程中确实会产生由跟踪引用变化带来的额外负担。由于G1对写屏障的复杂操作要比CMS消耗更多的运算资源,所以CMS的写屏障实现是直接的同步操作,而G1就不得不将其实现
为类似于消息队列的结构,把写前屏障和写后屏障中要做的事情都放到队列里,然后再异步处理。
※ 3-JVM(Java Virtual Machine)※
-- jvm学习:https://www.zybuluo.com/songhanshi/note/1733752
配置过java启动设置吗
没有,我只用过-xms等指令改过JVM参数,和jinfo看参数
-XMX -XSS -XMN说说对象创建到消亡的过程
https://blog.csdn.net/u012312373/article/details/46718911
https://blog.csdn.net/qq_25005909/article/details/78981512
JMM规定了内存主要划分为主内存和工作内存两种。此处的主内存和工作内存跟JVM内存划分(堆、栈、方法区)是在不同的层次上进行的,如果非要对应起来,主内存对应的是Java堆中的对象实例部分,工作内存对应的是栈中的部分区域,从更底层的来说,主内存对应的是硬件的物理内存,工作内存对应的是寄存器和高速缓存。
1. 线程的工作内存指的是什么,在内存的哪个地方
* JVM将内存组织为主内存和工作内存两个部分。
* 主内存主要包括本地方法区和堆。每个线程都有一个工作内存,主要包括两个部分,一个是属于该线程私有的栈和对主存部分变量拷贝的寄存器(包括程序计数器PC和cup工作的高速缓存区)。
① 所有的变量都存储在主内存中,对于所有线程都是共享的。
② 每条线程都有自己的工作内存,工作内存中保存的是主存中某些变量的拷贝,线程对变量的所有操作都必须在工作内存中进行,而不能直接读写主内存中的变量。
③ 线程之间无法直接访问对方的工作内存中的变量,线程间变量的传递均需要通过主内存来完成。
待完善:https://aalion.github.io/2019/12/08/concurrency12/
https://www.jianshu.com/p/679ad52eca05
一、概述
JRE和JDK的区别?
- JDK(Java Development Kit)
-- Java程序设计语言、Java虚拟机、Java类库这三部分统称为JDK,
广义上JDK常来代指整个Java技术体系;
-- Java的开发工具,提供了编译和运行Java程序所需的各种资源和工具;
-- 不仅可以开发Java程序,也同时拥有了运行Java程序的平台; - JRE(Java Runtime Enviroment)
-- Java运行环境,包括:虚拟机+java的核心类库;
-- 只能运行Java程序,不包含开发工具(编译器、调试器等)。
- JDK(Java Development Kit)
JVM了解么?
- 是什么
虚拟机是一种抽象化的计算机,通过在实际的计算机上仿真模拟各种计算机功能来实现。Java虚拟机有自己完善的硬体架构,如处理器、堆栈、寄存器等,还具有相应的指令系统。Java虚拟机屏蔽了与具体操作系统平台相关的信息,使得Java程序只需生成在Java虚拟机上运行的目标代码(字节码),就可以在多种平台上不加修改地运行。 - 系统
一个Java虚拟机实例在运行过程中有三个子系统来保障它的正常运行,分别是类加载器子系统, 执行引擎子系统和垃圾收集子系统。
- 是什么
主流:HotSpot VM
- Sun/OracleJDK和OpenJDK中的默认Java虚拟机,也是目前使用范围最广的Java虚拟机。
- HotSpot虚拟机中含有两个即时编译器
-- 编译耗时短但输出代码优化程度较低的客户端编译器(简称为C1)
-- 编译耗时长但输出代码优化质量也更高的服务端编译器(简称为C2)
-- 在分层编译机制下与解释器互相配合来共同构成HotSpot虚拟机的执行子系统
二、自动内存管理
2. Java内存区域与内存溢出异常
1- Java内存区域
JVM的内存模型可以说下吗?
(说一下Java虚拟机内存区域划分、各区域的介绍、1.8&1.7版本迭代)Java虚拟机内存的各个区域?
Java虚拟机在执行Java程序的过程中会把它所管理的内存划分为若干个不同的数据区域。(运行时数据区域,强调对内存空间的划分- 程序计数器(线程隔离
- Java虚拟机栈(线程隔离
- 本地方法栈(线程隔离
- Java堆(线程共享
- 方法区(线程共享

-- 灰色:线程私有,几乎不存在垃圾回收
-- 橘色:GC的作用区域需要有垃圾回收。
JVM内存区域和Java内存模型
https://www.cnblogs.com/czwbig/p/11127124.html (图、解释)
https://jingyan.baidu.com/article/4f34706e623281e387b56d84.html
Java虚拟机内存的各个区域-分
【1】程序计数器?- 空间较小
- 线程私有,生命周期与线程相同;
- 当前线程所执行的字节码的行号指示器;
- 字节码解释器工作时就是通过改变这个计数器的值来选取下一条需要执行的字节码指令,是程序控制流的指示器;
- 辅助完成分支、循环、跳转、异常处理、线程恢复等基础功能;
- 线程切换后能恢复到正确的执行位置,每条线程都需要有一个独立的程序计数器;
- 线程Java方法,这个计数器记录的是正在执行的虚拟机字节码指令的地址,
执行的是本地(Native)方法,这个计数器值则应为空(Undefined) - 唯一无OutOfMemoryError情况的
【2】 Java虚拟机栈? - 线程私有,生命周期与线程相同,同程序计数器
- 作用:
描述的是Java方法执行的线程内存模型:每个方法被执行的时候,Java虚拟机都会同步创建一个栈帧用于存储数据。每一个方法被调用直至执行完毕的过程,就对应着一个栈帧在虚拟机栈中从入栈到出栈的过程。 - 存储:
栈帧(Stack Frame)存储:局部变量表、操作数栈、动态连接、方法出口等信息;
局部变量表存储:
① 编译期可知的各种Java虚拟机基本数据类型(boolean、byte、char、short、int、float、long、double);
② 对象引用(reference类型,它并不等同于对象本身,可能是一个指向对象起始地址的引用指针,也可能是指向一个代表对象的句柄或者其他与此对象相关的位置);
③ returnAddress类型(指向了一条字节码指令的地址).
局部变量表存储空间:
局部变量表中的存储空间以局部变量槽(Slot)来表示,其中64位长度的long和double类型的数据会占用两个变量槽,其余的数据类型只占用一个 - 异常:
StackOverflowError异常:如果线程请求的栈深度大于虚拟机所允许的深度
OutOfMemoryError异常:如果Java虚拟机栈容量可以动态扩展,当栈扩展时无法申请到足够的内存时
【3】本地方法栈 - 与虚拟机栈作用相似,
- 与虚拟机栈区别:
-- 虚拟机栈为虚拟机执行Java方法(也就是字节码)服务
-- 本地方法栈则是为虚拟机使用到的本地(Native) 方法服务。 - 异常:
与虚拟机栈一样,本地方法栈也会在栈深度溢出或者栈扩展失败时分别抛出StackOverflowError和OutOfMemoryError异常。
【4】Java堆(Java Heap) - 虚拟机所管理的内存中空间最大的,所有线程共享的一块内存区域,在虚拟机启动时创建;
- 存储:对象实例(几乎所有;
- 垃圾收集器管理的内存区域;
- 分配内存的角度看,所有线程共享的Java堆中可以划分出多个线程私有的分配缓冲区 (TLAB),以提升对象分配时的效率;
- Java堆可被实现成固定大小的或可扩展的,当前主流的Java虚拟机都是按照可扩展来实现的(通过参数-Xmx和-Xms设定);
- 异常:
OutOfMemoryError异常:如果在Java堆中没有内存完成实例分配,且堆也无法再扩展时,Java虚拟机将会抛出OutOfMemoryError异常。
【5】方法区(Method Area) - 堆的一个逻辑部分
- 存储:已被虚拟机加载的类型信息、常量、静态变量、即时编译器编译后的代码缓存等数据。(字符串常量池?
- 永久代概念:用永久代来实现方法区
- JDK6,逐步改为采用本地内存(Native Memory)来实现方法区
- JDK8,完全废弃永久代的概念,改用与JRockit、J9一样在本地内存中实现的元空间(Meta- space)来代替。
- OutOfMemoryError异常:方法区无法满足新的内存分配需求时
【5.1】方法区-运行时常量池(Runtime Constant Pool) - 方法区的一部分
- 存储:编译期生成的各种字面量与符号引用、由符号引用翻译出来的直接引用
-- Class文件中除了有类的版本、字段、方法、接口等描述信息外,还有一项信息是常量池表,用于存放编译期生成的各种字面量与符号引用,这部分内容将在类加载后存放到方法区的运行时常量池中。
-- 除了保存Class文件中描述的符号引用外,还会把由符号引用翻译出来 的直接引用也存储在运行时常量池中 - 异常:
和方法区一样受方法区内存的限制,当常量池无法再申请到内存时会抛出OutOfMemoryError异常。
【6】直接内存 - 非虚拟机运行时数据区的一部分以及非内存区域
- 放这里的原因:这部分内存也被频繁地使用,也可能导致OutOfMemoryError异常
- OutOfMemoryError异常:各个内存区域总和大于物理内存限制
常量池、运行时常量池、字符串常量池中都存储的什么
- ans:常量池 .class文件的一部分,字面量和符号引用 |运行时常量池 方法区 加载后的常量池数据 |字符串常量池 方法区 是一组指针指向堆中的String对象的内存地址
- 常量池、运行时常量池、字符串常量池
- 字符串常量池(一组指针指向Heap中的String对象的内存地址)
:为避免每次都创建相同的字符串对象及内存分配,JVM内部对字符串对象的创建的优化
内存模型,堆和栈都有什么?
(问法不够准确,此处只问内存模型,应该是JMM,后面又问到堆栈应该是想问JVM内存,先按照JVM的角度回答,持续关注...)- 经常有人把Java内存区域笼统地划分为堆内存(Heap)和栈内存(Stack),这种划分方式直接继承自传统的C、C++程序的内存布局结构,在Java语言里就显得有些粗糙了,实际的内存区域划分要比这更复杂。不过这种划分方式的流行也间接说明了程序员最关注的、与对象内存分配关系最密切的区域是“堆”和“栈”两块。其中,“堆”在稍后笔者会专门讲述,而“栈”通常就是指这里讲的虚拟机栈,或者更多的情况下只是指虚拟机栈中局部变量表部分。
- 堆:对象实例;
- 栈:局部变量表、操作数栈、动态连接、方法出口等信息(z-详细见上)
JVM堆内存划分
(Java垃圾回收:- 永久代(方法区
- 老年代(堆
- 新生代(堆
-Eden区
-From Survivor
-To Survivor - 无论是哪个区域,存储的都只能是对象的实例,将Java 堆细分的目的只是为了更好地回收内存,或者更快地分配内存。
http://www.shaoqun.com/a/99944.html
2- 对象创建过程
new一个对象? -jvm3
- Java虚拟机遇到一条字节码new指令
- 首先将去检查这个指令的参数是否能在常量池中定位到一个类的符号引用,并且检查这个符号引用代表的类是否已被加载、解析和初始化过。如果没有,那必须先执行相应的类加载过程;
- 在类加载检查通过后,接下来虚拟机将为新生对象分配内存。
对象所需内存的大小在类加载完成后便可完全确定,为对象分配空间的任务实际上便等同于把一块确定大小的内存块从Java堆中划分出来。 - 内存分配完成之后,虚拟机必须将分配到的内存空间(但不包括对象头)都初始化为零值,如果使用了TLAB的话,这一项工作也可以提前至TLAB分配时顺便进行。
- 接下来,Java虚拟机还要对对象进行必要的设置
-- 例如这个对象是哪个类的实例、如何才能找到类的元数据信息、对象的哈希码(实际上对象的哈希码会延后到真正调用Object::hashCode()方法时才计算)、对象的GC分代年龄等信息。这些信息存放在对象的对象头(Object Header)之中。
-- 根据虚拟机当前运行状态的不同,如是否启用偏向锁等,对象头会有不同的设置方式。 - 虚拟机的视角,新的对象已经产生。
- Java程序的视角,对象创建才刚刚开始。
-- 构造函数,即Class文件中的()方法还没有执行,所有的字段都为默认的零值,对象需要的其他资源和状态信息也还没有按照预定的意图构造好。
-- 一般来说(由字节码流中new指令后面是否跟随invokespecial指令所决定,Java编译器会在遇到new关键字的地方同时生成这两条字节码指令,但如果直接通过其他方式产生的则不一定如此),new指令之后会接着执行()方法,按照程序员的意愿对对象进行初始化,这样一个真正可用的对象才算完全被构造出来。
jvm怎么知道对象属于哪个类?
- jvm3:对象头信息:用于存储对象自身的运行时数据,如哈希码(HashCode)、GC分代年龄、锁状态标志、线程持有的锁、偏向线程ID、偏向时间戳等,即“Mark Word”。、
以及另外一部分是类型指针,即对象指向它的类型元数据的指针,Java虚拟机通过这个指针来确定该对象是哪个类的实例。 - 推断:由对象头的类型指针获取。
- jvm3:对象头信息:用于存储对象自身的运行时数据,如哈希码(HashCode)、GC分代年龄、锁状态标志、线程持有的锁、偏向线程ID、偏向时间戳等,即“Mark Word”。、
3- OOM
|OutOfMemoryError异常-内存溢出异常|
堆溢出?
- 概念:
Java堆用于存储对象实例,只要不断地创建对象,并且保证GC Roots到对象之间有可达到路径来避免垃圾回收机制清除这些对象,那么在对象数量达到最大堆的容量限制后就会产生内存溢出异 - 原因:
大量对象占据了堆空间,而这些对象都持有强引用,导致无法回收,当对象大小之和大于由-Xmx参数指定的堆空间大小时,溢出错误就自然而然地发生了。(jvms) - 例子:
① 内存中加载的数据量过于庞大,如一次从数据库取出过多数
② 集合类中有对对象的引用,使用完后未清空,使得JVM不能回
③ 代码中存在死循环或循环产生过多重复的对象实体;
- 概念:
栈溢出? (HotSpot-虚拟机栈和本地方法栈)
- 概念:在《Java虚拟机规范》中描述了两种异常:
1)如果线程请求的栈深度大于虚拟机所允许的最大深度,将抛出StackOverflowError异常。
2)如果虚拟机的栈内存允许动态扩展,当扩展栈容量无法申请到足够的内存时,将抛出 OutOfMemoryError异常。 - 原因:
HotSpot虚拟机不支持扩展支持栈的动态扩展,只会在创建线程申请内存时就因无法获得足够内存而出现OutOfMemoryError异常,也只会因为栈容量无法容纳新的栈帧而导致StackOverflowError异常。(jvm3) - 当线程请求的栈深度超过虚拟机允许的栈深度时,便会抛出StackOverFlowError
-- -Xss设置的参数是针对每一个栈的,而非JVM所有线程栈内存总大小。
-- 每个方法的调用将创建一个栈帧。每一个方法调用时,都会创建一个栈帧,用于存储局部变量表、操作数栈、动态链接、方法出口等信息。
-- SUM(每个栈帧大小)>栈大小发生栈溢出
- 概念:在《Java虚拟机规范》中描述了两种异常:
调整栈内存jvm参数知道吗?常用的jvm参数有那些?
- 栈的参数配置
指令 作用 -Xss 指定线程的栈大小。栈是每个线程私有的内存空间。 递归10w次会出现什么?(OOM)
- 问题:栈溢出
- 原因:
-- 栈先进后出,方法压栈运行,递归过程先入的不能出栈,会存在栈空间中,这样就容易导致栈满而溢出。
-- 线程内部的每个方法调用会创建一个栈帧,所以如果“栈帧的数量*每个栈帧的大小>栈大小”时便会发生“栈溢出”。
-- 每当你调用一个方法,在这个方法执行前都会将之前的内存地址(也就是调用点)入栈,等被调用的方法执行完将地址出栈,程序根据这个数据返回调用点。
若递归调用次数太多,就会只入栈不出栈,于是堆栈就被压爆了,此为栈溢出。
递归函数调用的太深,需要太多的内存,递归里用到的局部变量存储在堆栈中,堆栈的访问效率高,速度快,但空间有限,递归太多变量需要一直入栈而不出栈,导致需要的内存空间大于堆栈的空间。 - 解决:可以考虑采取循环的方式来解决,将需要的数据在关键的调用点保存下来使用。即用自己的数据保存方法来代替系统递归调用产生的栈数据。
- 注:操作系统分配给一个进程的栈空间是2M,堆空间在32位机器上是4G。如果进程的栈空间使用超过了2M就会栈溢出,堆使用超过4G就会堆溢出。
栈溢出异常,通过什么方式来解决?
- HotSpot虚拟机不支持扩展支持栈的动态扩展
- 解决
-- 1)代码层面
将递归改为循环或保存数据(降低层次,或变量设为全局变量,这样它会被存在堆里(或其它地方))
-- 2)线上临时解决办法或者1)无法解决
重新调整JVM参数-Xss,重启应用
如-Xss将thread stack size变为2m - 如何设置
-- 首先,操作系统分配给每个进程的内存是有限制的。那么:
可用的栈内存=进程最大内存-堆内存-方法区内存-程序计数器内存-虚拟机本身耗费内存
-- 而栈是线程私有的,那么可以认为:
程序可建立的线程数量=可用栈内存/栈大小
-- 这样当栈大小设置太大时,就会导致创建的线程数量太少。这样在多线程的情况下便可能发生“内存溢出”情况。
-- 在x64位Linux操作系统上,JVM默认的栈大小为1024kb。
由于我们线上的程序要支持高并发场景,所以栈的大小设置为256kb,这里仅供参考。
怎么让方法区溢出?
- “永久代(Perm)”(jdk1.6/1.7),“元空间(meta-space)”(jdk1.8)用来实现方法区
jvms:一个系统不断产生新的类,而没有回收,最终可能导致永久区溢出。
// jdk1.6 -XX:MaxPermSize=5mpublic class PermOOM{public static void main(String[] args) {try {for (int i = 0; i <100000 ; i++) {// 每次循环都生成一个新的类(是类,而非对象实例)CglibBean bean = new CglibBean("geym.jvm.ch3.perm.bean"+i,new HashMap());}}catch (Error e){e.printStackTrace();}}}// 结果// Exception in thread "main" java.lang.OutOfMemoryError: PermGen space
解决永久区溢出,从以下几个方面考虑(jvms)
-- 增加MaxPermSize的值
-- 减少系统需要的类的数量
-- 使用ClassLoader合理地装载各个类,并定期进行回收
遇到过的OOM?
- 不断创建对象可以导致堆溢出 - 堆
- 递归调用可以导致栈溢出 - 栈
- 堆
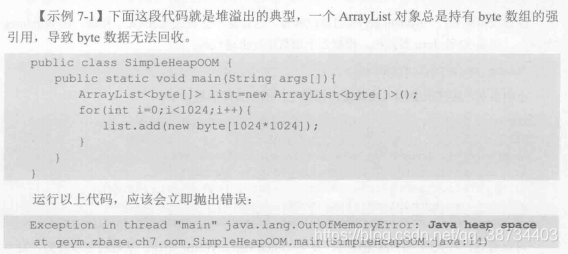
- 栈
递归|单线程|多线程
OOM 如何排查以及优化/OOM问题怎么定位(线上?) -P50
常规的处理方法(jvm3)- 首先通过内存映像分析工具对Dump出来的堆转储快照进行分析。
第一步首先应确认内存中导致OOM的对象是否是必要的,也就是要先分清楚到底是出现了内存泄漏(Memory Leak)还是内存溢出(Memory Overflow)。 - 如果是内存泄漏,可进一步通过工具查看泄漏对象到GC Roots的引用链,找到泄漏对象是通过怎样的引用路径、与哪些GC Roots相关联,才导致垃圾收集器无法回收它们,根据泄漏对象的类型信息以及它到GC Roots引用链的信息,一般可以比较准确地定位到这些对象创建的位置,进而找出产生内存泄漏的代码的具体位置。
- 如果不是内存泄漏,换句话说就是内存中的对象确实都是必须存活的,那就应当检查Java虚拟机的堆参数(-Xmx与-Xms)设置,与机器的内存对比,看看是否还有向上调整的空间。再从代码上检查是否存在某些对象生命周期过长、持有状态时间过长、存储结构设计不合理等情况,尽量减少程序运行期的内存消耗。
- 排查流程
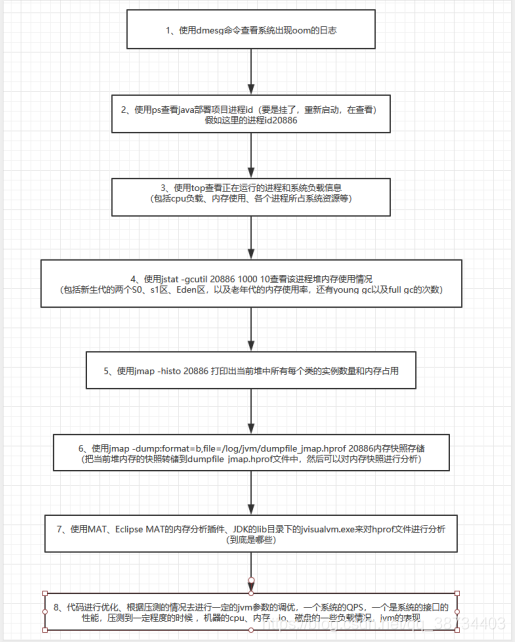
- 流程:https://www.cnblogs.com/c-xiaohai/p/12489336.html
https://blog.csdn.net/ywlmsm1224811/article/details/91866707
https://blog.csdn.net/wx1528159409/article/details/93530352#%E6%8E%92%E6%9F%A5%EF%BC%9A
2)优化: - 使用更小的图片
- StringBuilder来替代频繁的“+”
https://blog.csdn.net/weixin_41101173/article/details/79716332
- 首先通过内存映像分析工具对Dump出来的堆转储快照进行分析。
Java会不会内存泄露?怎样会泄露?
Java 内存泄漏问题,解释一下什么情况下会出现?
- Java使用的内存种类包含三种,这三种类型的内存都可能发生内存泄漏。
• 堆内存泄漏,如果JVM 不能在java 堆中获得更多内存来分配更多java 对象,将会抛出java堆内存不足(java OOM) 错误。如果java 堆充满了活动对象,并且JVM 无法再扩展java 堆,那么它将不能分配更多java 对象。更多情况是程序设计有问题,生成的对象占用过多的堆内存造成堆内存泄漏。
• 本地内存泄漏, 如果JVM 无法获得更多本地内存,它将抛出本地OOM错误。当进程用到的内存到达操作系统的最大限值,或者当计算机用完RAM 和交换空间时,通常会发生这种情况。当发生这种情况时,JVM处于本地内存OOM状态,此时虚拟机会打印相关信息并退出。本地内存泄漏根本原因是Java调用本地库或方法,这些本地库中的API有内存泄漏。
• 加载类(字节码)的Perm内存不足.即指定的Permsize不足以加载系统运行使用的.class字节码文件,就发发生Perm内存不足的错误。
- Java使用的内存种类包含三种,这三种类型的内存都可能发生内存泄漏。
3. 垃圾回收
垃圾回收,堆区为什么那么分
- 不过无论从什么角度,无论如何划分,都不会改变Java堆中存储内容的共性,无论是哪个区域,存储的都只能是对象的实例,将Java堆细分的目的只是为了更好地回收内存,或者更快地分配内存。(jvm3)
Java垃圾回收简单讲一下,里面的算法?
- 判断对象?标记算法?回收算法?收集器?
1-判断对象死亡
JVM 垃圾回收的是如何确定垃圾?
- 什么是垃圾
简单的说就是内存中已经不再被使用到的空间就是垃圾。
Person p = null;
- 什么是垃圾
java垃圾回收,如何判断一个对象需要回收
- 引用计数算法
- 可达性分析算法
具体:https://blog.csdn.net/weixin_38569499/article/details/85645517
引用计数算法 和 可达性分析算法
- 引用计数算法
在对象中添加一个引用计数器,每当有一个地方引用它时,计数器值就加一;
当引用失效时,计数器值就减一;任何时刻计数器为零的对象就是不可能再被使用的 - 优点
会占用了一些额外的内存空间来进行计数,原理简单,判定效率也很高,在大多数情况下它都是一个不错的算法。 缺点
必须要配合大量额外处理才能保证正确地工作,如单纯的引用计数就很难解决对象之间相互循环引用的问题。Object a = new Object();Object b = new Object();a=b;b=a;a=b=null; //这样就导致gc无法回收他们。
可达性分析算法
通过一系列称为“GC Roots”的根对象作为起始节点集,从这些节点开始,根据引用关系向下搜索,搜索过程所走过的路径称为“引用链”(Reference Chain),如果某个对象到GC Roots间没有任何引用链相连,或者用图论的话来说就是从GC Roots到这个对象不可达时,则证明此对象是不可能再被使用的。
缺点:实现比较复杂、需要分析大量数据,消耗大量时间、分析过程需要GC停顿(引用关系不能发生变化),即停顿所有Java执行线程(称为"Stop The World",是垃圾回收重点关注的问题)。
- 引用计数算法
是否知道什么是GC Roots?(jvm3)
- 固定可作为GC Roots的对象:
-- 在虚拟机栈(栈帧中的本地变量表)中引用的对象,譬如各个线程被调用的方法堆栈中使用到的参数、局部变量、临时变量等。
-- 在方法区中类静态属性引用的对象,譬如Java类的引用类型静态变量。
-- 在方法区中常量引用的对象,譬如字符串常量池(String Table)里的引用。
-- 在本地方法栈中JNI(即通常所说的Native方法)引用的对象。
-- Java虚拟机内部的引用,如基本数据类型对应的Class对象,一些常驻的异常对象(比如NullPointExcepiton、OutOfMemoryError)等,还有系统类加载器。
-- 所有被同步锁(synchronized关键字)持有的对象。
-- 反映Java虚拟机内部情况的JMXBean、JVMTI中注册的回调、本地代码缓存等。 - 临时GC Roots
-- 根据用户所选用的垃圾收集器以及当前回收的内存区域不 同,还可以有其他对象“临时性”地加入,共同构成完整GC Roots集合。
-- 如后文将会提到的分代收集和局部回收(Partial GC),如果只针对Java堆中某一块区域发起垃圾收集时(如最典型的只针对新生代的垃圾收集),必须考虑到内存区域是虚拟机自己的实现细节(在用户视角里任何内存区域都是不 可见的),更不是孤立封闭的,所以某个区域里的对象完全有可能被位于堆中其他区域的对象所引用,这时候就需要将这些关联区域的对象也一并加入GCRoots集合中去,才能保证可达性分析的正确性。
- 固定可作为GC Roots的对象:
哪些对象可以作为gcroot(jvm2)
- 1)虚拟机栈(栈帧中的本地变量表)中引用的对象
- 2)方法区中类静态属性引用的对象
- 3)方法区中常量引用的对象
- 4)本地方法栈中JNI(即Native方法)引用的对象
public class GCRootDemo{private static GCRootDemo2 t2;//第2种,static静态,一份全部实例变量共用?被加载进方法区,// Java7方法区为永久代;GCRootDemo2其他对象private static final GCRootDemo3 t3 = new GCRootDemo3(8);//static final常量引用public static void m1(){GCRootDemo t1 = new GCRootDemo();//第1种:m1方法在栈中,t1为方法中的局部变量System.gc();System.out.println("第一次GC完成");}public static void main(String[] args) {m1();}}
引用?
- ~
强引用:只有强引用还存在,GC就永远不会收集被引用的对象。
软引用:不占空间,gc不回收
弱引用:WeakReference 调用gc直接回收 ★
虚引用:PhantomReference 与队列结合使用,get不到 - 强引用:最传统的“引用”的定义,是指在程序代码之中普遍存在的引用赋值,即类似“Object obj=new Object()”这种引用关系。无论任何情况下,只要强引用关系还存在,垃圾收集器就永远不会回收掉被引用的对象。
- 软引用:用来描述一些还有用,但非必须的对象。只被软引用关联着的对象,在系统将要发生内存溢出异常前,会把这些对象列进回收范围之中进行第二次回收,如果这次回收还没有足够的内存,才会抛出内存溢出异常。在JDK1.2版之后提供了SoftReference类来实现软引用。
- 弱引用:也是用来描述那些非必须对象,但是它的强度比软引用更弱一些,被弱引用关联的对象只能生存到下一次垃圾收集发生为止。当垃圾收集器开始工作,无论当前内存是否足够,都会回收掉只被弱引用关联的对象。在JDK1.2版之后提供了WeakReference类来实现弱引用。
- 虚引用:也称为“幽灵引用”或者“幻影引用”,是最弱的一种引用关系。一个对象是否有虚引用的存在,完全不会对其生存时间构成影响,也无法通过虚引用来取得一个对象实例。为一个对象设置虚引用关联的唯一目的只是为了能在这个对象被收集器回收时收到一个系统通知。在JDK1.2版之后提供 了PhantomReference类来实现虚引用。
- ~
判断一个对象生存还是死亡?
- 第一次标记
如果对象进行可达性分析算法之后没发现与GC Roots相连的引用链,那它将会第一次标记并且进行一次筛选。
筛选条件:判断此对象是否有必要执行finalize()方法。
筛选结果:当对象没有覆盖finalize()方法、或者finalize()方法已经被JVM执行过,则判定为可回收对象。如果对象有必要执行finalize()方法,则被放入F-Queue队列中。稍后在JVM自动建立、低优先级的Finalizer线程(可能多个线程)中触发这个方法; - 第二次标记
GC对F-Queue队列中的对象进行二次标记。
如果对象在finalize()方法中重新与引用链上的任何一个对象建立了关联,那么二次标记时则会将它移出“即将回收”集合。如果此时对象还没成功逃脱,那么只能被回收了。 - finalize() 方法
finalize()是Object类的一个方法、一个对象的finalize()方法只会被系统自动调用一次,经过finalize()方法逃脱死亡的对象,第二次不会再调用;
https://www.cnblogs.com/chenpt/p/9797126.html
- 第一次标记
2-垃圾收集算法
4.jvm卡表(Card Table)?
安全区域(Safe Region),记忆集
垃圾回收算法有哪些
- 标记-清除
- 复制
- 标记-整理
- 分代收集算法
垃圾回收算法,为什么老年代和新生代不同
- 存活周期不同
1)弱分代假说(Weak Generational Hypothesis):绝大多数对象都是朝生夕灭的。 2)强分代假说(Strong Generational Hypothesis):熬过越多次垃圾收集过程的对象就越难以消亡。
- 存活周期不同
垃圾收集算法新生代和老年代分别用什么算法
- 回收新生代:大多使用复制算法
- 回收老年代:使用“标记-清理”或“标记-整理”算法
如果对象大部分都是存活的,少部分需要清除,用什么算法
- 新生代中,每次垃圾收集时都发现有大批对象死去,只有少量存活,那就选用复制算法,只需要付出少量存活对象的复制成本就可以完成收集。
- 老年代中,因为对象存活率高、没有额外空间对它进行分配担保,就必须使用“标记-清理”或“标记-整理”算法来进行回收。
名词概念
- 部分收集(Partial GC):指目标不是完整收集整个Java堆的垃圾收集,又分为:
■ 新生代收集(Minor GC/Young GC):指目标只是新生代的垃圾收集。
■ 老年代收集(Major GC/Old GC):指目标只是老年代的垃圾收集。目前只有CMS收集器会有单独收集老年代的行为。另外请注意“Major GC”这个说法现在有点混淆,在不同资料上常有不同所指, 读者需按上下文区分到底是指老年代的收集还是整堆收集。
■ 混合收集(Mixed GC):指目标是收集整个新生代以及部分老年代的垃圾收集。目前只有G1收集器会有这种行为。 - 整堆收集(Full GC):收集整个Java堆和方法区的垃圾收集。
- 部分收集(Partial GC):指目标不是完整收集整个Java堆的垃圾收集,又分为:
说说GC的流程
什么时候对象会到老年代,老年代的更新机制
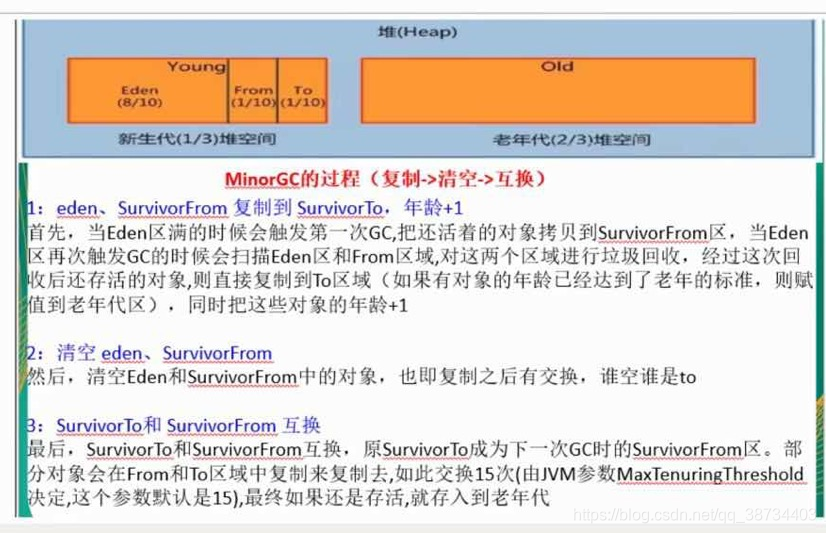
- 分配
默认的,Edem : from : to = 8 : 1 : 1 ( 可以通过参数 –XX:SurvivorRatio 来设定 ) - 过程
当对象在 Eden 出生后,在经过一次 Minor GC 后,如果对象还存活,并且能够被另外一块 Survivor 区域所容纳( 上面已经假设为 from 区域,这里应为 to 区域,即 to 区域有足够的内存空间来存储 Eden 和 from 区域中存活的对象 ),则使用复制算法将这些仍然还存活的对象复制到另外一块 Survivor 区域 ( 即 to 区域 ) 中,然后清理所使用过的 Eden 以及 Survivor 区域 ( 即 from 区域 ),并且将这些对象的年龄设置为1,以后对象在 Survivor 区每熬过一次 Minor GC,就将对象的年龄 + 1,当对象的年龄达到某个值时 ( 默认是 15 岁,可以通过参数 -XX:MaxTenuringThreshold 来设定 ),这些对象就会成为老年代。
但这也不是一定的,对于一些较大的对象 ( 即需要分配一块较大的连续内存空间 ) 则是直接进入到老年代。 - JVM 每次只会使用 Eden 和其中的一块 Survivor 区域来为对象服务,所以无论什么时候,总是有一块 Survivor 区域是空闲着的。 如此往复
http://www.shaoqun.com/a/99944.html
https://blog.csdn.net/yangyang12345555/article/details/79257171
- 分配
3-回收器
垃圾回收器了解吗?
- 是什么?有哪些?做什么?
为何需要垃圾回收?
- Java垃圾收集机制为避免出现内存溢出异常。
有哪些gc收集器?
- 7个回收器
新生代收集器:Serial、ParNew、Parallel Scavenge
老年代收集器:CMS、Serial Old、Parallel Old
整堆收集器: G1
https://www.cnblogs.com/chenpt/p/9803298.html
易懂:https://blog.csdn.net/weixin_43228814/article/details/88934939
https://blog.csdn.net/qq_35246620/article/details/80522720
- 7个回收器
垃圾回收器在哪块?
- Java堆
- 收集器应该将Java堆划分出不同的区域,然后将回收对象依据其年龄(年龄即对象熬过垃圾收集过程的次数)分配到不同的区域之中存储。
- 在JVM体系结构中,与垃圾回收相关的两个主要组件是堆内存和垃圾回收器。堆内存是内存数据区,用来保存运行时的对象实例。垃圾回收器也会在这里操作。
垃圾回收器(CMS)详细过程。哪个阶段出现STW?
- 运作过程的四个步骤?
1)初始标记(CMS initial mark)
2)并发标记(CMS concurrent mark)
3)重新标记(CMS remark)
4)并发清除(CMS concurrent sweep) - 初始标记、重新标记:这两个步骤仍然需要“Stop The World”。
- 初始标记:仅仅只是标记一下GC Roots能直接关联到的对象,速度很快;
- 并发标记阶段:就是从GC Roots的直接关联对象开始遍历整个对象图的过程,这个过程耗时较长但是不需要停顿用户线程,可以与垃圾收集线程一起并发运行;
- 重新标记阶段:为修正并发标记期间,因用户程序继续运作而导致标记产生变动的那一部分对象的标记记录,这个阶段的停顿时间通常会比初始标记阶段稍长一些,但也远比并发标记阶段的时间短;
- 并发清除阶段:清理删除掉标记阶段判断的已经死亡的对象,由于不需要移动存活对象,所以这个阶段也是可以与用户线程同时并发的。
- 运作过程的四个步骤?
垃圾收集器CMS出现问题了怎么办?
- 1)promotion failed – concurrent mode failure
Minor GC后, 救助空间容纳不了剩余对象,将要放入老年带,老年带有碎片或者不能容纳这些对象,就产生了concurrent mode failure, 然后进行stop-the-world的Serial Old收集器。
-- 解决办法:-XX:UseCMSCompactAtFullCollection -XX:CMSFullGCBeforeCompaction=5 或者调大新生代或者救助空间 - 2)concurrent mode failure
CMS是和业务线程并发运行的,在执行CMS的过程中有业务对象需要在老年带直接分配,例如大对象,但是老年带没有足够的空间来分配,所以导致concurrent mode failure, 然后需要进行stop-the-world的Serial Old收集器。
-- 解决办法:+XX:CMSInitiatingOccupancyFraction,调大老年带的空间,+XX:CMSMaxAbortablePrecleanTime - 总结一句话:使用标记整理清除碎片和提早进行CMS操作。
- 两个问题:promotion failed和concurrent mode failure
- 解决:
第一个,可以让CMS在进行一定次数的Full GC的时候进行一次标记整理算法。
第二个,调低触发CMS GC执行的阀值。
https://my.oschina.net/hosee/blog/674181
- 1)promotion failed – concurrent mode failure
4-内存分配与回收策略
java内存管理?
- Java技术体系的自动内存管理,最根本的目标是自动化地解决两个问题
自动给对象分配内存以及自动回收分配给对象的内存。
- Java技术体系的自动内存管理,最根本的目标是自动化地解决两个问题
什么时候对象会到老年代,老年代的更新机制?
- 大对象直接进入老年代
-- 大对象就是指需要大量连续内存空间的Java对象,最典型的大对象便是那种很长的字符串,或者元素数量很庞大的数组
-- 避免大对象的原因:
在分配空间时,容易导致内存明明还有不少空间时就提前触发垃圾收集,以获取足够的连续空间才能安置好它们,而当复 制对象时,大对象就意味着高额的内存复制开销。
-- HotSpot中-XX:PretenureSizeThreshold
指定大于该设置值的对象直接在老年代分配,避免在Eden区及两个Survivor区之间来回复制,产生大量的内存复制操作。 - 长期存活的对象将进入老年代
-- 虚拟机给每个对象定义了一个对 象年龄(Age)计数器,存储在对象头中。
-- 对象通常在Eden区里诞生,如果经过第一次 Minor GC后仍然存活,并且能被Survivor容纳的话,该对象会被移动到Survivor空间中,并且将其对象年龄设为1岁。对象在Survivor区中每熬过一次Minor GC,年龄就增加1岁,当它的年龄增加到一定程度(默认为15),就会被晋升到老年代中。
-- -XX: MaxTenuringThreshold设置:对象晋升老年代的年龄阈值。 - 动态对象年龄判定
-- HotSpot虚拟机并不是永远要求对象的年龄必须达到-XX:MaxTenuringThreshold才能晋升老年代,如果在Survivor空间中相同年龄所有对象大小的总和大于Survivor空间的一半,年龄大于或等于该年龄的对象就可以直接进入老年代,无须等到-XX:MaxTenuringThreshold中要求的年龄。
-- -XX:MaxTenuringThreshold=15
-- 同年龄的,满足同年对象达到Survivor空间一半的规则
- 大对象直接进入老年代
操作系统层面是怎么分配内存的 91
https://blog.csdn.net/qq_32635069/article/details/74838187
4. 监控、故障处理工具
1-jstack((Stack Trace for Java))
- jstack原理
1)jstack定义-P111
- jstack用于生成java虚拟机当前时刻的线程快照
- 线程快照是当前java虚拟机内每一条线程正在执行的方法堆栈的集合,
- 生成线程快照的主要目的是定位线程出现长时间停顿的原因,如线程间死锁、死循环、请求外部资源导致的长时间等待等。
- 线程出现停顿的时候通过jstack来查看各个线程的调用堆栈,就可以知道没有响应的线程到底在后台做什么事情,或者等待什么资源。
2)实现 -P110 !!!
JDK 1.5中,java.lang.Thread类新增了一个getAllStackTraces()方法用于获取虚拟机中所有线程的StackTraceElement对象。使用这个方法可以通过简单的几行代码就完成jstack的大部分功能,在实际项目中不妨调用这个方法做个管理员页面,可以随时使用浏览器来查看线程堆栈。
3)使用
jstack [ option ] pid 如,jstack -l 3500
-l 长列表. 打印关于锁的附加信息。
4)jsp(JVM Process Status Tool)
可以列出正在进行的虚拟机进程,并显示虚拟机执行主类名称以及这些进程的本地虚拟机进程唯一ID(LVMID)---对应3)的pid
如,jsp -l
三、虚拟机执行子系统
6. .class文件
7. 虚拟机类加载机制
- java虚拟机类加载机制?
- jvm3:Java虚拟机把描述类的数据从Class文件加载到内存,并对数据进行校验、转换解析和初始化,最终形成可以被虚拟机直接使用的Java类型,这个过程被称作虚拟机的类加载机制。
1-时机
类加载的顺序?
- 一个类从被加载到虚拟机内存中开始,到卸载出内存为止,它的整个生命周期将会经历加载(Loading)、验证(Verification)、准备(Preparation)、解析(Resolution)、初始化(Initialization)、使用(Using)和卸载(Unloading)七个阶段;
- 其中,验证、准备、解析三个部分统称为连接(Linking)。
- 加载、验证、准备、初始化和卸载这五个阶段的顺序是确定的,类的加载过程必须按照这种顺序按部就班地开始;
- 解析阶段:在某些情况下可以在初始化阶段之后再开始,这是为了支持Java语言的运行时绑定特性(也称为动态绑定或晚期绑定)。
- “开始”强调这些阶段通常都是互相交叉地混合进行的,会在一个阶段执行的过程中调用、激活另一个阶段。
- 七个阶段的发生顺序如图:
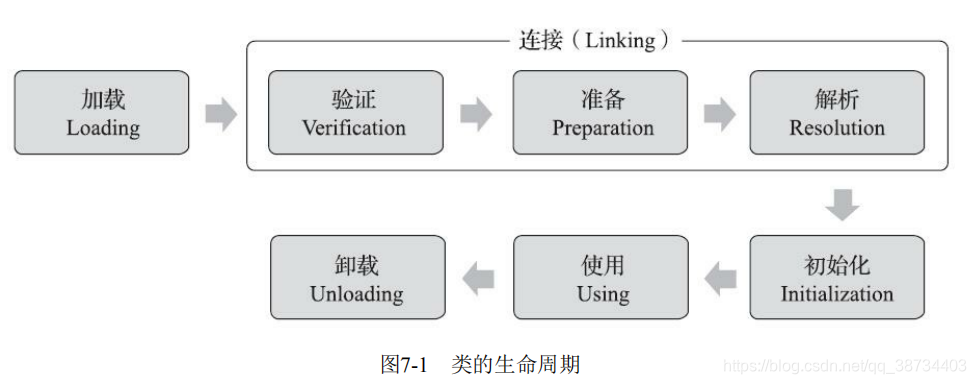
有哪些操作会触发类加载?
- 《Java虚拟机规范》中并没有对在什么情况下需要开始类加载过程的第一个阶段“加载”进行强制约束。但对于初始化阶段,则严格规定了有且只有六种情况必须立即对类进行“初始化”(而加载、验证、准备自然需要在此之前开始):
- 对一个类型进行主动引用,“有且只有”这六种场景中的行为称为。除此之外的所有引用类型的方式都不会触发初始化,称为被动引用;
- 【主动引用】
1)遇到new、getstatic、putstatic或invokestatic这四条字节码指令时,如果类型没有进行过初始化,则需要先触发其初始化阶段。能够生成这四条指令的典型Java代码场景有:
-- 使用new关键字实例化对象的时候。
-- 读取或设置一个类型的静态字段(被final修饰、已在编译期把结果放入常量池的静态字段除外)的时候。
-- 调用一个类型的静态方法的时候。
2)使用java.lang.reflect包的方法对类型进行反射调用的时候,如果类型没有进行过初始化,则需要先触发其初始化。
3)当初始化类的时候,如果发现其父类还没有进行过初始化,则需要先触发其父类的初始化。
4)当虚拟机启动时,用户需要指定一个要执行的主类(包含main()方法的那个类),虚拟机会先初始化这个主类。
5)当使用JDK 7新加入的动态语言支持时,如果一个java.lang.invoke.MethodHandle实例最后的解析结果为REF_getStatic、REF_putStatic、REF_invokeStatic、REF_newInvokeSpecial四种类型的方法句柄,并且这个方法句柄对应的类没有进行过初始化,则需要先触发其初始化。
6)当一个接口中定义了JDK8新加入的默认方法(被default关键字修饰的接口方法)时,如果有这个接口的实现类发生了初始化,那该接口要在其之前被初始化。 - 【被动引用】
1)通过子类引用父类的静态字段,不会导致子类初始化
2)通过数组定义来引用类,不会触发此类的初始化
3)常量在编译阶段会存入调用类的常量池中,本质上没有直接引用到定义常量的类,因此不会触发定义常量的 类的初始化 - 图示:https://blog.csdn.net/L_Mr_l/article/details/81909995
2-过程
类加载过程?
- 概念:
Java虚拟机中类加载的全过程,即加载、验证、准备、解析和初始化这五 个阶段所执行的具体动作。 - 1)加载
加载阶段,Java虚拟机需要完成以下三件事情:
① 通过一个类的全限定名来获取定义此类的二进制字节流。
② 将这个字节流所代表的静态存储结构转化为方法区的运行时数据结构。
③ 在内存中生成一个代表这个类的java.lang.Class对象,作为方法区这个类的各种数据的访问入口。 - 2)验证
验证是连接阶段的第一步,这一阶段的目的是确保Class文件的字节流中包含的信息符合《Java虚拟机规范》的全部约束要求,保证这些信息被当作代码运行后不会危害虚拟机自身的安全。
① 文件格式验证
② 元数据验证
③ 字节码验证
④ 符号引用验证 - 3)准备
准备阶段是正式为类中定义的变量(即静态变量,被static修饰的变量)分配内存并设置类变量初始值的阶段。
这些变量所使用的内存都应当在方法区中进行分配,但必须注意到方法区 本身是一个逻辑上的区域,在JDK7及之前,HotSpot使用永久代来实现方法区时,实现是完全符合这种逻辑概念的;而在JDK8及之后,类变量则会随着Class对象一起存放在Java堆中,这时候“类变量在方法区”就完全是一种对逻辑概念的表述了。 - 4)解析
Java虚拟机将常量池内的符号引用替换为直接引用的过程。
-- 符号引用(Symbolic References):
符号引用以一组符号来描述所引用的目标,符号可以是任何形式的字面量,只要使用时能无歧义地定位到目标即可。
-- 直接引用(Direct References):
直接引用是可以直接指向目标的指针、相对偏移量或者是一个能间接定位到目标的句柄。
① 类或接口的解析
② 字段解析
② 方法解析
③ 接口方法解析 - 5)初始化
初始化阶段就是执行类构造器()方法的过程。
- 概念:
详细说说类加载的过程,静态代码块执行在哪个阶段?
静态代码块在初始化阶段执行
https://blog.csdn.net/qq_36839438/article/details/106738514
https://blog.csdn.net/qq_38159458/article/details/105865964
3-类加载器
类加载器的4个种类
1)启动类加载器:这个类加载器负责放在目录中的,或者被-Xbootclasspath参数所指定的路径中的,并且是虚拟机识别的类库。用户无法直接使用。
2)扩展类加载器:这个类加载器由AppClassLoader\lib\ext由sun.misc.Launcher实现。是ClassLoader中getSystemClassLoader()方法的返回值。它负责用户路径(ClassPath)所指定的类库。用户可以直接使用。如果用户没有自己定义类加载器,默认使用这个。
4)自定义加载器:用户自己定义的类加载器。双亲委派模型
双亲委派模型:- 定义:上述4种展示的类加载之间的层次关系称为xxx。
- 优点:Java类随着它的类加载器一起具备了一种带有优先级的层次关系。
- 双亲委托模型的工作过程是:如果一个类加载器(ClassLoader)收到了类加载的请求,它首先不会自己去尝试加载这个类,而是把这个请求委托给父类加载器去完成,每一个层次的类加载器都是如此,因此所有的加载请求最终都应该传送到顶层的启动类加载器中,只有当父类加载器反馈自己无法完成这个加载请求(它的搜索范围中没有找到所需要加载的类)时,子加载器才会尝试自己去加载。
https://blog.csdn.net/qq_35758236/article/details/81115320
为啥要双亲加载
- 使用双亲委托机制的好处是:能够有效确保一个类的全局唯一性,当程序中出现多个限定名相同的类时,类加载器在执行加载时,始终只会加载其中的某一个类。
双亲委派机制,怎么打破
tomcat
四、程序编译与代码优化
- 说一说为什么要有JIT
JIT是经过一系列的分析和热点代码探测技术,对一部分class字节码编译成机器语言,以此提高性能,而解释器就是执行一句class字节码,就翻译成一句机器语言。JIT的存在,减少对热点代码的重复翻译。
https://www.jianshu.com/p/ae0d47e770f0
https://www.cnblogs.com/xuyatao/p/6914769.html
JVM堆上会不会产生线程安全问题 pP48
- 对象的内存分配过程中,主要是对象的引用指向这个内存区域,然后进行初始化操作。Java堆确定出一块内存区域,用于给新建对象分配内存。
- 在并发场景中,如果两个线程先后把对象引用指向了同一个内存区域,如何内存分配过程的线程安全性?
- 一般有两种解决方案:
1、对分配内存空间的动作做同步处理,采用CAS机制,配合失败重试的方式保证更新操作的原子性。
2、每个线程在Java堆中预先分配一小块内存,然后再给对象分配内存的时候,直接在自己这块"私有"内存中分配,当这部分区域用完之后,再分配新的"私有"内存。
方案1在每次分配时都需要进行同步控制,这种是比较低效的。
方案2是HotSpot虚拟机中采用的,这种方案被称之为TLAB分配,即Thread Local Allocation Buffer。这部分Buffer是从堆中划分出来的,但是是本地线程独享的。
TLAB时线程独享的,但是只是在“分配”这个动作上是线程独占的,至于在读取、垃圾回收等动作上都是线程共享的。
https://juejin.im/post/5d4250def265da03ab422c79
那比如你在项目里写了一个Class A,然后在某一个jar包里也有一个Class A,比如com.a.A,那么这两个class你觉得哪个先被加载,会出现什么问题(不会,求了答案,告诉我说他也不清楚,就是考考我对这块有没有自己的理解😑)
字节码是什么?
字节码:Java程序无须重新编译便可在多种不同的计算机上运行。
字节码(Byte-code)是一种包含执行程序,由一序列 op 代码/数据对组成的二进制文件,是一种中间码。 javap -c
4-mysql
查询逻辑架构
1 Mysql逻辑架构:

--MySQL 5.5.5 版本开始成为了默认存储引擎
--不同的存储引擎共用一个Server 层查询的执行流程
select * from user where userId=1;1 Mysql逻辑架构
1)客户端:
作用:与server层建立连接,发送查询请求、接受响应的结果集。
2)Server层
-包含连接器、查询缓存、分析器、优化器、执行器等组件,完成mysql大部分功能;
-功能:查询解析、分析、优化、缓存以及所有的内置函数(例如,日期、时间、数学和加密函数)-以及存储过程、触发器、视图等跨存储引擎的功能;
-通用的日志模块binlog
3)存储引擎层
-作用:负责MySQL中数据的存储和提取。
-支持多个存储引擎,例如:InnoDB、MyISAM等;
-InnoDB:MySQL 5.5.5版本开始成为默认存储引擎,InnoDB引擎包含自带的日志模块redolog
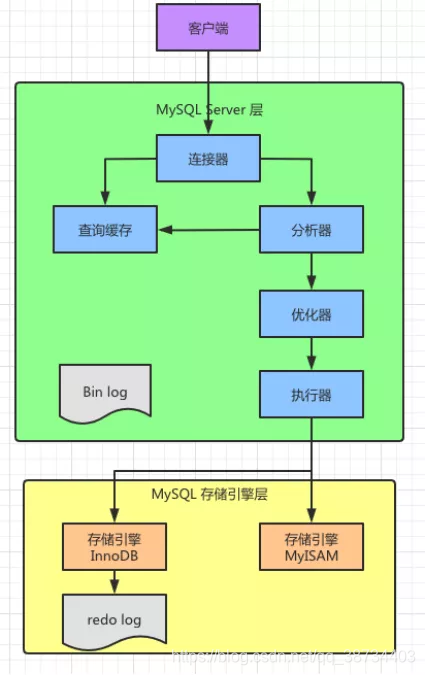
2 查询流程梳理
- 连接器:当客户端登陆MySQL的时候,对身份认证和权限判断。
- 查询缓存: 执行查询语句的时候,会先查询缓存,命中则直接返回结果,更新语句则会清空缓存(MySQL 8.0 版本后移除)。
- 分析器: 假设在没有命中查询缓存的情况下,SQL请求就会来到分析器。分析器负责明确SQL要完成的功能,以及检查SQL的语法是否正确。
- 优化器:为SQL提供优化执行的方案。
- 执行器: 将语句分发到对应的存储引擎执行,并返回数据。
- 存储引擎:存储数据,提供读写接口;
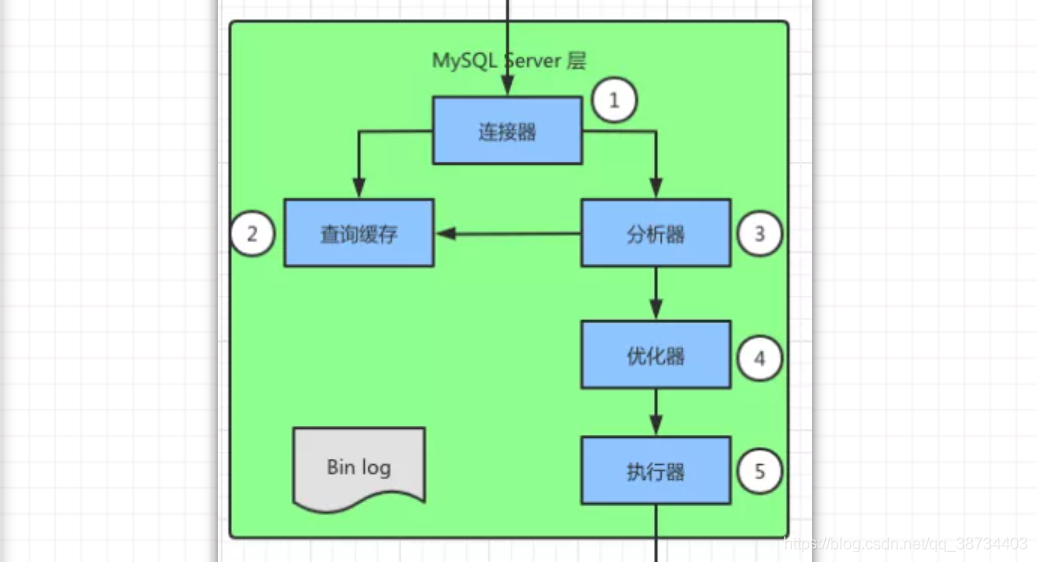
3 组件
- 1)连接器
--负责身份认证和权限鉴别
--5种连接状态,权限表的Command字段:
sleep->线程正在等待客户端发数据
query->连接线程正在执行查询
locked->线程正在等待表锁的释放
sorting result->线程正在对结果进行排序
sending data->向请求端返回数据
--连接:分为长连接、短连接
长连接:连接成功后,客户端请求一直使用是同一个连接。
短连接:每次执行完SQL请求的操作之后会断开连接,如果再有SQL请求会重新建立连接。
--短连接反复创建消耗资源,优先长连接;保持长连接而耗费资源,断开释放的解决方案:①定期或占内存大查询断开长连接 ②5.7,5.7++,执行命令初始化会释放占用内存 - 2)查询缓存
--执行sql前先查询缓存,目的:查看是否之前执行过该语句,并且将执行结果按照key-value的形式缓存在内存;Key-SQL语句,Value-查询的结果。
--问题:表更新,对应查询缓存会被清空
表不断地被使用(更新、查询),查询缓存会频繁地失效,失去意义。
应用:修改不频繁的数据表,例如:系统配置、或者修改不频繁的表。
缓存的淘汰策略:先进先出,适用于查询远大于修改的情况下, 否则建议使用Redis或者其他做缓存工具。
大多数情况下不推荐使用查询缓存。
MySQL 8.0 后删除了查询缓存的功能,应用较少。
关闭:query_cache_type设置成 DEMAND
--缓存情况的几个状态值:
Qcache_inserts 是否有新的数据添加,每有一条数据添加Value会+1。
Qcache_hits 查询语句是否命中缓存,每有一条语句命中Value会+1。
Qcache_free_memory 缓存空闲大小 - 3)分析器
--用来分辨SQL语句的执行目的,通过语法分析和语法规则生成了SQL语法树,生成查询计划
--执行过程分为2步:
① 词法分析(Lexical scanner):负责从SQL 语句提取关键字,如:查询的表,字段名,查询条件等等。
② 语法规则(Grammar rule module),判断SQL语句是否合乎MySQL的语法。
即,词法分析将SQL语句拆分成一个个单词,语法规则根据MySQL定义的语法规则生成对应的数据结构,存储在对象结构中。
其结果供优化器生成执行计划,再调用存储引擎接口执行。 - 4)优化器
--作用:对SQL进行优化,生成最有的执行方案
--流程:语法树作为优化器的输入,而优化器包含了逻辑变换和代价优化两部分的内容。在优化完成以后会生成SQL执行计划作为整个优化过程的输出,交给执行器在存储引擎上执行。
--①逻辑变换:
-概念:在关系代数基础上进行变换
-目的:化简,同时保证sql变换前后结果一致,即不会带来结果集的变化
-包含:
a> 否定消除:否定NOT转化成反向值
b> 等值常量传递:有真实值的参数被数值替代。等值传递性,尽早“下推”运算;
c> 常量表达式计算:常量直接计算,计算后化简
--②代价优化:
-作用:确定每个表,根据条件是否应用索引,应用哪个索引和确定多表连接的顺序等问题。
-通过基于代价的计算方法来决定如何执行查询
-过程:
1> 赋值操作代价:
针对每个数据库操作(创建表、返回数据集)设置对应的代价;
2> 计算操作数量:
SQL请求需要做哪些具体的数据库操作;
3> 求和操作代价:
已知SQL由哪些数据库操作组成,以及每个操作对应的代价,求和->整体SQL执行的代价;
4> 选择代价计划:
设给SQL执行的操作都是一个计划,则这些操作的不同组合就会对应不同的计划->选择整体执行代价最低的操作计划,作为这次执行SQL语句的代价计划达到总代价最低。 - 5)执行器
--执行器会选择执行计划开始执行,但执行前会校验请求用户是否拥有查询的权限,如果没有权限,就会返回错误信息,否则将会去调用MySQL引擎层的接口,执行对应的SQL语句并且返回结果。
--注:SQL语句的执行顺序并不是按照书写顺序来的,顺序的定义会在分析器中做好;
一条查询语句执行流程?
- 《mysql实战45-01》
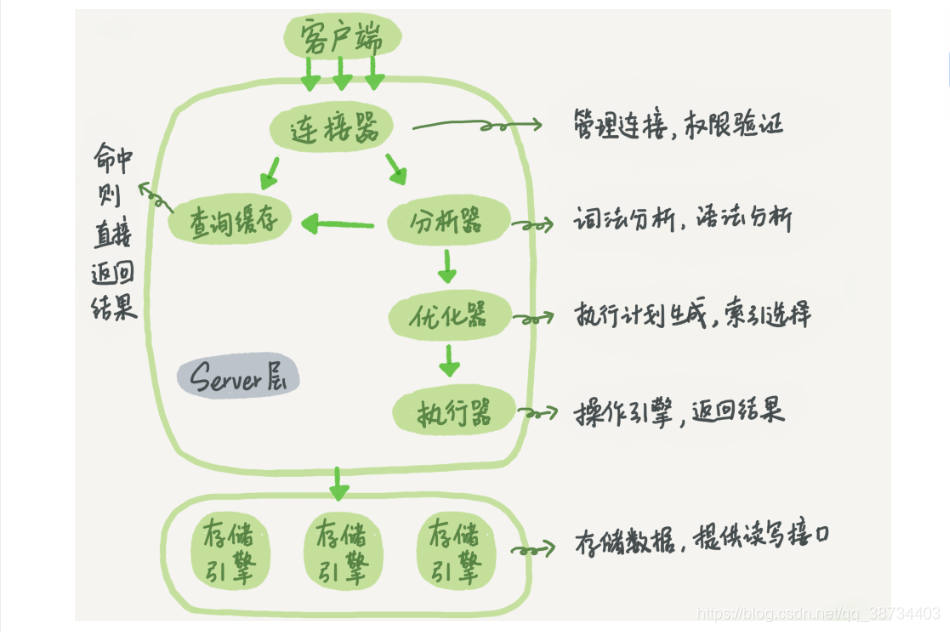
- 总: select * from T where ID=10
--MySQL 大体分为 Server 层和存储引擎层两部分:
① Server 层:
包括连接器、查询缓存、分析器、优化器、执行器等,涵盖 MySQL 的大多数核心服务功能,以及所有的内置函数(如日期、时间、数学和加密函数等),所有跨存储引擎的功能都在这一层实现,比如存储过程、触发器、视图等
② 存储引擎层
负责数据的存储和提取。其架构模式是插件式的,支持 InnoDB、MyISAM、Memory 等多个存储引擎。对不同的存储引擎共用一个Server 层。现在最常用的存储引擎是 InnoDB,它从 MySQL 5.5.5 版本开始成为了默认存储引擎。 - 1)连接器
-第一步,你会先连接到这个数据库上,这时用就是连接器。连接器负责跟客户端建立连接、获取权限、维持和管理连接。
--在传输完账密后,与服务端建立连接。在完成 TCP 握手后,连接器就要开始通过账密认证你的身份。
--如果账密不对,会返回一个错误,然后客户端程序结束执行。
如果用户名密码认证通过,连接器会到权限表里面查出你拥有的权限,并依赖于此时读到的权限。
--客户端如果太长时间没动静,连接器就会自动将它断开。这个时间是由参数 wait_timeout控制的,默认值是 8 小时。再请求,需要重新连接。
长连接 短连接 ,尽量长连接 - 2)查询缓存
-连接建立完成后,就可以执行 select 语句了。执行逻辑就会来到第二步:查询缓存。
--拿到一个查询请求后,先到查询缓存看看,是不是执行过这条语句。执行过会被直接缓存在内存中。key 是查询的语句,value 是查询的结果。查询到直接返回给客户端。否则,就会继续后面的执行阶段。执行完成后,执行结果会被存入查询缓存中。 - 3)分析器
-没有命中缓存,就要开始执行语句了。
select * from T where ID=10
--词法分析:
如,"select"关键字识别出来,是一个查询语句。字符串“T”识别成“表名 T”,字符串“ID”识别成“列 ID”
--语法分析:
语法分析器会根据语法规则,判断你输入的这个 SQL 语句是否满足 MySQL 语法。 - 4)优化器
-优化器是在表里面有多个索引的时候,决定使用哪个索引;或者在一个语句有多表关联(join)的时候,决定各个表的连接顺序。
-逻辑结果一样,但顺序不同,效率会不同,优化器选择使用哪一个方案。 - 5)执行器
-进入执行器阶段,开始执行语句。
--开始执行的时,会先判断一下对表 T 有没有执行查询的权限,如果没有,就会返回没有权限的错误;
--如果有权限,就打开表继续执行。打开表的时候,执行器就会根据表的引擎定义,去使用这个引擎提供的接口。 - 执行器执行流程
① ID字段无索引
调用 InnoDB 引擎接口会遍历每一行数据并判断,符合存入结果集,不符合跳过,将最后的结果集返回client
② ID有索引
接口会取满足添加的一行数据,直到取完 - 慢查询日志中看到一个 rows_examined 的字段,在执行器每次调用引擎获取数据行的时候累加的。
redolog(重做日志)|binlog(归档日志)
- 《Mysql实战45讲-02日志系统》|redo&bin|redo&bin_ab
- 总结:一条update语句的更新流程?
1 日志
redo log 是InnoDB引擎特有的日志,binlog是Server层自己的日志;
1)redolog
--作用:确保事务的持久性。
以防在发生故障的时间点,还有脏页未写入磁盘,在重启mysql的时候,根据redo log进行重做,从而达到事务的持久性这一特性。
2)binlog
https://www.sohu.com/a/275633000_684445
https://www.jianshu.com/p/c16686b35807
一个定义,两个误解,三个用途,四个常识
1>定义
--binlog是记录所有数据库表结构变更(例如CREATE、ALTER TABLE…)以及表数据修改(INSERT、UPDATE、DELETE…)的二进制日志。
--binlog不会记录SELECT和SHOW这类操作,因为这类操作对数据本身并没有修改,但你可以通过查询通用日志来查看MySQL执行过的所有语句。
--注:update操作没有造成数据变化,也是会记入binlog
2>结构
binlog称之为二进制日志,这个二进制日志包括两类文件:
索引文件(文件名后缀为.index)用于记录哪些日志文件正在被使用
日志文件(文件名后缀为.00000*)记录数据库所有的DDL和DML(除了数据查询语句)语句事件。
3>三个用途
《MySQL技术内幕 InnoDB存储引擎》--恢复、复制、审计。
--恢复
--复制:
主库有一个log dump线程,将binlog传给从库;
从库有两个线程,一个I/O线程,一个SQL线程,I/O线程读取主库传过来的binlog内容并写入到relay log,SQL线程从relay log里面读取内容,写入从库的数据库。
--审计:
用户可以通过二进制日志中的信息来进行审计,判断是否有对数据库进行注入攻击。
3)关联
redo log 和 binlog是怎么关联起来的?
回答:它们有一个共同的数据字段,叫XID。崩溃恢复的时候,会按顺序扫描 redo log:
--如果碰到既有 prepare、又有 commit 的 redo log,就直接提交;
--如果碰到只有 parepare、而没有 commit 的 redo log,就拿着 XID 去 binlog 找对应的事务。2 redo log
--WAL技术:Write-Ahead Logging,关键点:先写日志,再写磁盘
--具体来说:
① 当有一条记录需要更新,InnoDB 引擎就会先把记录写到redolog,并更新内存,更新完成。同时,InnoDB 引擎会在适当的时候(往往是在系统比较空闲的时候),将这个操作记录更新到磁盘里面。
② redolog大小固定,如,可配置一组 4 个文件,每个文件的大小是 1GB,那总共可以记录 4GB 的操作。从头开始写,写到末尾就又回到开头循环写。

--write pos和checkpoint--循环写
①write pos 当前记录的位置,一边写一边后移,写到第 3 号文件末尾后就回到 0 号文件开头。
②checkpoint 当前要擦除的位置,也是往后推移并且循环的,擦除记录前要把记录更新到数据文件。
关系:writepos、checkpoint 之间空着的部分,可以用来记录新的操作。若writepos 追上checkpoint,表示满了,这时不能再执行新的更新,得停下来先擦掉一些记录,把 checkpoint 推进一下
--crash-safe
redo log使InnoDB保证即使数据库发生异常重启,之前提交的记录都不会丢失,这个能力称为crash-safe;5 redolog两阶段提交
--两阶段提交:redo log 的写入拆成了两个步骤:prepare 和 commit,这就是"两阶段提交"
--目的:保证2份日志逻辑一致
--反证法证明必要性(update 语句来做例子):
假设当前 ID=2 的行,字段 c 的值是 0,再假设执行update 语句过程中在写完第一个日志后,第二个日志还没有写完期间发生了 crash,出现问题:数据库的状态就有可能和用它的日志恢复出来的库的状态不一致.
① 先写 redo log 后写 binlog
redolog写完crash,redolog存储 binlog没存储,binlog数据恢复丢失数据
② 先写 binlog 后写 redo log
bin写完crash,redolog事务无效没存储,binlog恢复多一个事务
--发生:崩溃(偶尔发生),扩容(常)3 binlog(归档日志)
--binlog-Server层自己的日志;逻辑日志;追加写的形式4 执行器和 InnoDB 引擎在执行update的内部流程
--流程图,浅色: InnoDB 内部执行的,深色:执行器中执行的;

1> 查找数据
-执行器先找引擎取 ID=2 这一行。
-ID 是主键,引擎直接用树搜索找到这一行。
-若ID=2 这一行所在的数据页本来就在内存中,就直接返回给执行器;否则,需要先从磁盘读入内存,然后再返回。
2> 赋值
执行器拿到引擎给的行数据,把这个值加上 1,比如原来是 N,现在就是 N+1,得到新的一行数据,再调用引擎接口写入这行新数据。
3> 更新内存,更新redolog
引擎将这行新数据更新到内存中,同时将这个更新操作记录到 redo log 里面,此时redo log 处于 prepare 状态。然后告知执行器执行完成了,随时可以提交事务。
4> 写入binlog
执行器生成这个操作的 binlog,并把 binlog 写入磁盘。
5> 提交事务
执行器调用引擎的提交事务接口,引擎把刚刚写入的 redo log 改成提交(commit)状态,更新完成。6 数据恢复
怎样让数据库恢复到半个月内任意一秒的状态?
--前提:
-binlog记录所有的逻辑操作,追加写
-备份系统中保存最近半个月的所有binlog,同时系统会定期做整库备份。“定期”取决于系统的重要性,可以是一天一备,也可以是一周一备。
-当需要恢复到指定的某一秒步骤:
① 找到最近一次全量备份,恢复到临时库;
② 从备份的时间点开始,将备份的 binlog 依次取出来,重放到某时间之前的那个时刻。
③ 临时库就跟误删之前的线上库一样,把表数据从临时库取出来,按需要恢复到线上库去。7 为什么2份日志
为什么会有两份日志呢?因为最开始 MySQL 里并没有 InnoDB 引擎。MySQL 自带的引擎是 MyISAM,但是MyISAM 没有 crash-safe 的能力,binlog 日志只能用于归档。而 InnoDB 是另一个公司以插件形式引入 MySQL 的,既然只依靠 binlog 是没有 crash-safe 能力的,所以 InnoDB使用另外一套日志系统——也就是 redo log 来实现 crash-safe 能力。8 2份日志的3个不同点
1) redo log 是 InnoDB 引擎特有的;binlog 是 MySQL 的 Server 层实现的,所有引擎都可以使用。
2) redo log 是物理日志,记录的是“在某个数据页上做了什么修改”;binlog 是逻辑日志,记录的是这个语句的原始逻辑,比如“给 ID=2 这一行的 c 字段加 1 ”。
3.)redo log 是循环写的,空间固定会用完;binlog 是可以追加写入的。“追加写”是指binlog 文件写到一定大小后会切换到下一个,并不会覆盖以前的日志。
redobinlog补充
innodb存储架构
2 InnoDB 架构
图示看出,innodb主要分为2块:
InnoDB In-Memory Structures 内存
InnoDB On-Disk Structures 磁盘2.1 InnoDB 内存架构
- 1)Buffer Pool
--MySQL 不会直接去修改磁盘的数据,因为这样做太慢了,MySQL 会先改内存,然后记录 redo log,等有空了再刷磁盘,如果内存里没有数据,就去磁盘 load。
而这些数据存放的地方,就是 Buffer Pool
--内存管理:
Buffer Pool 采用基于 LRU(least recently used) 的算法来管理内存 - 2)Change Buffer
--问题:“如果内存里没有数据,就去磁盘 load”
--解决流程:MySQL 发现你要修改的页,不在内存里,就把你要对页的修改,先记到一个叫 Change Buffer 的地方,同时记录 redo log,然后再慢慢把数据 load 到内存,load 过来后,再把 Change Buffer 里记录的修改,应用到内存(Buffer Pool)中,这个动作叫做 merge;而把内存数据刷到磁盘的动作,叫 purge:
merge:Change Buffer -> Buffer Pool
purge:Buffer Pool -> Disk - 3)Adaptive Hash Index「自适应哈希索引」
--问题:MySQL 索引,不管是在磁盘里,还是被 load 到内存后,都是 B+ 树,B+ 树的查找次数取决于树的深度;
--解决:那些频繁被访问的数据,每次过来都要走 B+ 树来查询,使用一个指针把数据的位置记录下来,即自适应哈希索引,MySQL 会自动评估使用自适应索引是否值得,如果观察到建立哈希索引可以提升速度,则建立。 - 4)Log Buffer
Log Buffer 里的 redo log,会被刷到磁盘里 - 2.2 InnoDB 磁盘架构
- 1)表空间(Tablespaces)
--Tablespaces 分为五种:
The System Tablespace
File-Per-Table Tablespaces
General Tablespace
Undo Tablespaces
Temporary Tablespaces
--平时创建的表的数据,可以存放到 The System Tablespace 、File-Per-Table Tablespaces、General Tablespace 三者中的任意一个地方,具体取决于你的配置和创建表时的 sql 语句。 2)Doublewrite Buffer
--如果说 Change Buffer 是提升性能,那么 Doublewrite Buffer 就是保证数据页的可靠性。
--问题:
MySQL 以「页」为读取和写入单位,一个「页」里面有多行数据,写入数据时,MySQL 会先写内存中的页,然后再刷新到磁盘中的页。
假设在某一次从内存刷新到磁盘的过程中,一个「页」刷了一半,突然操作系统或者 MySQL 进程奔溃了,这时候,内存里的页数据被清除了,而磁盘里的页数据,刷了一半,处于一个中间状态,不尴不尬,可以说是一个「不完整」,甚至是「坏掉的」的页。
-redolog无效:
Redo Log 也已经无力回天,Redo Log 是要在磁盘中的页数据是正常的、没有损坏的情况下,才能把磁盘里页数据 load 到内存,然后应用 Redo Log。
--解决:
MySQL 在刷数据到磁盘之前,要先把数据写到另外一个地方,也就是 Doublewrite Buffer,写完后,再开始写磁盘。Doublewrite Buffer 可以理解为是一个备份(recovery),万一真的发生 crash,就可以利用 Doublewrite Buffer 来修复磁盘里的数据。1 mysql的存储结构
1)表空间
表空间是数据库中的逻辑结构,它解耦了表、索引等与文件的关联
--概念:表空间是数据库中的逻辑结构,它解耦了表、索引等与文件的关联。
--表空间类型:
1> 系统表空间
存储change buffer, doublewrite buffer以及与innodb相关的所有对象的元数据。(如:表空间和数据库信息,表结构与字段信息等等。)
-mysql8.0中移除原先用于存储表结构信息的.frm文件,所有元数据都存储在此系统表空间中。
2> 独立表空间
-每张表对应一个独立的表空间。
-通过配置my.ini中的参数:innodb_file_per_table=1启动独立表空间,否则,默认为系统表空间。
-5.6.6之后此配置默认开启,因此默认为独立表空间。
-创建时机:
创建表时,会自动为表创建一个对应表名的表空间,并在数据库目录下生成一个“表名.ibd”的表空间文件。
3> 普通表空间
手动创建的表空间:create tablespace 表空间名
4> 临时表空间
存储临时表以及临时表变化对应的回滚段。2)区/簇/Extent
区是物理存储结构,对应大磁盘中真实的物理空间。它从文件第一个字节开始按相同大小划分,并通过XDES Entry在逻辑上把区串联起来。通过XDES Entry所在页以及页内偏量可以计算出XDES Entry与它管理的物理空间区的关系。
--页:一个磁盘或文件的容量也是非常可观,极其不便管理,因此innodb把文件划分成一个个大小相等的存储块,这些块也被称为页;
--区:
-引入:根据局部性原理,cpu在使用的数据时,下一步也会大概率使用逻辑上相邻的数据。因此为了提高数据读操作的性能,innodb把逻辑上相临的数据尽可能在物理上也存储在相邻的页中;为了实现这一目标,Innodb引入了区/簇的概念;
-概念:一个区/簇是物理上连续分配的一段空间,extent又被划分成连续的页,以存储同一逻辑单元的数据(如下面的索引段、数据段)。一个区/簇,默认由64个连续的页(Page)组成,每个页默认大小为16K。
-作用:为逻辑单元分配连续的空间,同时也用于管理区内的存储空间状态(如:区内哪些页已满,哪些还未使用,哪些包含碎片)3) 段/Segment
段也是一个逻辑结构,它让具有具体相同逻辑含义和相同存储结构的数据归为一组,方便管理。
--概念:表空间的逻辑组成部分,innodb把逻辑上有关联(具体相同逻辑含义和相同存储结构)的区/簇归属为一个段;
--作用:管理区的使用情况以及为数据分配空间时,提供空间存储状态。
--存储:存储具有相同意义的数据,如:B+对中的非叶子节点或B+树中的叶子节点。常见的段有数据段、索引段、回滚段等。
--创建一个索引就会创建两个段:一个是数据段(B+树对应的叶子节点),一个是索引段(非叶子节点)。4)页/Page
页是物理存储IO操作的最小单元。它也是从文件第一个字节开始按相同大小划分。表是通过索引的方式组织数据,聚集索引元数据中存储了此表对就的Root page No。页是有编号的,通过编号就可与物理空间建立关联。
--概念:innodb中io操作的最小单位。innodb中的页类似于现实中书本的页。
--大小:
页的大小默认是16KB;可以通过innodb_page_size参数指定,可选项为:4KB、8KB、16KB、32KB、64KB;当page size为4、8、16KB时,对应一个extent的page数量同步变化,以保证extent(区/簇)大小保持1M不变。当page size为32KB或64KB时,extent内的page数量保证不变,extent同步变为2M和4M;
--页号:每个页都有一个对应的从0开始的编号,这个编号叫做页号。
--位置计算:
Innodb引擎可以根据页号和页大小计算出索引B+树root page的准确地址;
--存储内容:
主要用来存储业务相关的数据,以及为了管理内存分配而存在的extent和segment信息;
--page存储内容分类:
① FSP HDR 页
② 任何一个页都由页头、页身和页尾组成
-页头:指明当前页号、类型和所属表空间。
-页尾:主要用于数据的校验。
-页身:这是页中用来存储数据的主要部分。
页身又分为表空间首页头信息区和业务数据区
FSP HEADER包含:1):表空间信息2):段信息3):碎片区/簇信息5)数据部分
真正的区信息节点则存放在当前页的数据区。段、区都是为了管理空间的存储状态,为页分配空间服务,真正的查询只需要通过Page No和B+树中各级节点的关联关系就可以操作整个表物理空间上的数据。
2 行/Row
行是最终存储业务数据的物理单元。默认一页16K,可以存储大概1000多行索引数据(非叶子节点),或者20行甚至更多的业务数据(叶子节点)。页之间通过B+树的“二分找查(假设为多分)”算法快速定位数据,页内则通过 Page Directory,把多行分一组,一组对应Page Directory有序数组中的一个slot,这样可以在页内进行一次“二分查找”优化。
--mysql的存储结构是为了给业务数据分配一块用来存储的物理空间,到此终于可以在指定的页中记录业务数据。而innodb是基于行进行存储;
--Compact格式的存储结构中,每条记录都包含一系列头信息,描述当前记录的存储状态。但是除了头信息外,则根据记录所在节点不同存储的数据也有所不同。
-聚集索叶子节点,记录存储的是表中的业务行,除行数据本身外,还包含了事务id,回滚段指针,以及在没有指定主键和唯一索引时还包含一个隐藏的row_id。
-非叶子节点针对的是B+树搜索,因此记录的是子节点的最小记录值以及子节点的页号。B+树节点与page的关系
--Innodb page只是物理上的存储空间,相当于一本书的一页,仅仅是数据的载体。B+树节点是数据的逻辑结构,理论上它们没有必然的关系。
--Innodb中为了实现简单,B+树节点与page页是一一对应;为了记录行本身的状态,一条记录innodb会增加额外的记录头信息。如果是叶子节点,还会增加:row_id(隐藏的主键)、trx_id(事务id)、回滚指针等附加字段。
- innodb中数据是以B+树的方式组织,叶子节点存储关键字与行数据,非叶子节点存储关键字(索引数据)与页号。
- io的最小操作单元为页

存储引擎
- 1 MySQL用的是什么引擎?
MySQL常用的四种引擎:InnoDB、MyISAM、MEMORY、MERGE存储引擎
2 mysql存储引擎分类
--存储引擎(Storage engine)定义:
MySQL中的数据、索引以及其他对象是如何存储的,是一套文件系统的实现。
-- 数据库存储引擎:是数据库底层软件组织,数据库管理系统(DBMS)使用数据引擎进行创建、查询、更新和删除数据。不同的存储引擎提供不同的存储机制、索引技巧、锁定水平等功能,使用不同的存储引擎,还可以获得特定的功能。现在许多不同的数据库管理系统都支持多种不同的数据引擎。MySQL的核心就是插件式存储引擎。
--常用的存储引擎:
① Innodb引擎:
-- MySQL默认事务型引擎。
在需要它不支持的特性时,才考虑使用其他存储引擎。
-- 提供了对数据库ACID事务的支持。并且还提供了行级锁和外键的约束。
设计的目标就是处理大数据容量的数据库系统。
-- MVCC 来支持高并发,并且实现了四个标准隔离级别(未提交读、提交读、可重复读、可串行化)。其默认级别时可重复读(REPEATABLE READ),在可重复读级别下,通过 MVCC + Next-Key Locking 防止幻读。
-- 主索引时聚簇索引,在索引中保存了数据,从而避免直接读取磁盘,因此对主键查询有很高的性能。
-- 内部做了很多优化,包括从磁盘读取数据时采用的可预测性读,能够自动在内存中创建hash索引以加速读操作的自适应哈希索引,以及能够加速插入操作的插入缓冲区等。
-- 支持真正的在线热备份。
MySQL 其他的存储引擎不支持在线热备份,要获取一致性视图需要停止对所有表的写入,而在读写混合的场景中,停止写入可能也意味着停止读取。
-- 提供了具有提交、回滚和崩溃恢复能力的事务安全。
-- 对比MyISAM引擎,写的处理效率会差一些,并且会占用更多的磁盘空间以保留数据和索引。
-- 特点:支持自动增长列,支持外键约束
② MyIASM引擎
-- mysql5.1及之前版本,为Mysql的默认引擎;
-- 不支持事务,也不支持行级锁和外键。
-- 优势:访问速度快,对事务完整性没有要求或者以select,insert为主的应用基本上可以用这个引擎来创建表;
-- 设计简单,数据以紧密格式存储。对于只读数据,或者表比较小、可以容忍修复操作,则依然可以使用它。
-- 提供了大量的特性,包括压缩表、空间数据索引等。
-- 不支持行级锁,只能对整张表加锁,读取时会对需要读到的所有表加共享锁,写入时则对表加排它锁。但在表有读取操作的同时,也可以往表中插入新的记录,这被称为并发插入(CONCURRENT INSERT)。
-- 可以手工或者自动执行检查和修复操作,但是和事务恢复以及崩溃恢复不同,可能导致一些数据丢失,而且修复操作是非常慢的。
-- 如果指定了 DELAY_KEY_WRITE 选项,在每次修改执行完成时,不会立即将修改的索引数据写入磁盘,而是会写到内存中的键缓冲区,只有在清理键缓冲区或者关闭表的时候才会将对应的索引块写入磁盘。这种方式可以极大的提升写入性能,但是在数据库或者主机崩溃时会造成索引损坏,需要执行修复操作。
-- 支持3种不同的存储格式,分别是:静态表;动态表;压缩表
③ MEMORY引擎:memory
-- 所有的数据都在内存中,数据的处理速度快,但是安全性不高。
-- Memory存储引擎使用存在于内存中的内容来创建表。每个memory表只实际对应一个磁盘文件,格式是.frm。memory类型的表访问非常的快,因为它的数据是放在内存中的,并且默认使用HASH索引,但是一旦服务关闭,表中的数据就会丢失掉。
-- MEMORY存储引擎的表可以选择使用BTREE索引或者HASH索引,两种不同类型的索引有其不同的使用范围
-- Memory类型的存储引擎主要用于哪些内容变化不频繁的代码表,或者作为统计操作的中间结果表,便于高效地对中间结果进行分析并得到最终的统计结果,。对存储引擎为memory的表进行更新操作要谨慎,因为数据并没有实际写入到磁盘中,所以一定要对下次重新启动服务后如何获得这些修改后的数据有所考虑。
④ MERGE存储引擎:merge
-- Merge存储引擎是一组MyISAM表的组合,这些MyISAM表必须结构完全相同,merge表本身并没有数据,对merge类型的表可以进行查询,更新,删除操作,这些操作实际上是对内部的MyISAM表进行的。3 innodb和MyISAM区别?
区别:
- Innodb MyISAM 存储结构 所有的表都保存在同一个数据文件中(也可能是多个文件,或者是独立的表空间文件),InnoDB表的大小只受限于操作系统文件的大小,一般为2GB 每张表被存放在三个文件:.frm-表格定义、MYD(MYData)-数据文件、MYI(MYIndex)-索引文件 存储空间 InnoDB的表需要更多的内存和存储,它会在主内存中建立其专用的缓冲池用于高速缓冲数据和索引 MyISAM可被压缩,存储空间较小 可移植性、备份及恢复 免费的方案可以是拷贝数据文件、备份 binlog,或者用 mysqldump,在数据量达到几十G的时候就相对痛苦了 由于MyISAM的数据是以文件的形式存储,所以在跨平台的数据转移中会很方便。在备份和恢复时可单独针对某个表进行操作 文件格式 数据和索引是集中存储的,.ibd 数据和索引是分别存储的,数据.MYD,索引.MYI 记录存储顺序 按主键大小有序插入 按记录插入顺序保存 外键 支持 不支持 事务 支持 不支持 锁支持(锁是避免资源争用的一个机制,MySQL锁对用户几乎是透明的) 行级锁定、表级锁定,锁定力度小并发能力高 表级锁定 SELECT MyISAM更优 INSERT、UPDATE、DELETE InnoDB更优 select count(*) myisam更快,因为myisam内部维护了一个计数器,可以直接调取。 索引的实现方式 B+树索引,Innodb 是索引组织表 B+树索引,myisam 是堆表 哈希索引 支持 不支持 全文索引 不支持 支持 4 MyISAM索引与InnoDB索引的区别
1)InnoDB索引是聚簇索引,MyISAM索引是非聚簇索引。
2)InnoDB的主键索引的叶子节点存储着行数据,因此主键索引非常高效。
3)MyISAM索引的叶子节点存储的是行数据地址,需要再寻址一次才能得到数据。
4)InnoDB非主键索引的叶子节点存储的是主键和其他带索引的列数据,因此查询时做到覆盖索引会非常高效。5 存储引擎选择
--是否要支持事务,如果要请选择Innodb,如果不需要可以考虑 MyISAM。
--如果表中绝大多数都是读查询(有人总结出读:写比率大于100:1),可以考虑MyISAM,如果既有读又有写,而且也挺频繁,请使用 InnoDB。
--系统崩溃后,MyISAM 恢复起来更困难,能否接受。
--MySQL 5.5 开始 InnoDB 已经成为 MySQL 的默认引擎(之前是 MyISAM ),说明其优势是有目共睹的,如果你不知道用什么,那就用InnoDB吧,至少不会差。
--如果没有特别的需求,使用默认的Innodb即可。
--MyISAM:以读写插入为主的应用程序,比如博客系统、新闻门户网站。
--Innodb:更新(删除)操作频率也高,或者要保证数据的完整性;并发量高,支持事务和外键。比如OA自动化办公系统。- 感觉你的描述中innodb功能比myisam更强,你是这么觉得吗?
(两个特性和区别的角度阐述?)
- 感觉你的描述中innodb功能比myisam更强,你是这么觉得吗?
日志有哪些?
- https://mp.weixin.qq.com/s/XTpoYW--6PTqotcC8tpF2A
- 日志类型
① 重做日志(redo log)
② 回滚日志(undo log)
③ 二进制日志(bin log)
④ 错误日志(error log)
⑤ 慢查询日志(slow query log)
⑥ 一般查询日志(general log)
⑦ 中继日志(relay log)
事务
- 1 事务的概念
--事务(Transaction)是并发控制的基本单位。
--所谓事务,它是一个操作序列,这些操作要么都执行,要么都不执行,它是一个不可分割的工作单位。例如,银行转帐工作:从一个帐号扣款并使另一个帐号增款,这两个操作要么都执行,要么都不执行。 - 2 引擎
InnoDB支持,MyISAM 不支持 - 3 四大特性ACID
1)原子性:原子性是指事务包含的所有操作要么全部成功,要么全部失败回滚。
2)一致性:一个事务执行之前和执行之后都必须处于一致性状态。
AB用户总共5000,如何转账还是5000.
3)隔离性:多个并发事务之间要相互隔离。
4)持久性:一个事务一旦被提交了,那么对数据库中的数据的改变就是永久性的,即便是在数据库系统遇到故障的情况下也不会丢失提交事务的操作。 4 特性之间关系
◆ 只有满足一致性,事务的结果才是正确的。
◆ 在无并发的情况下,事务串行执行,隔离性一定能够满足。此时只要能满足原子性,就一定能满足一致性。在并发的情况下,多个事务并行执行,事务不仅要满足原子性,还需要满足隔离性,才能满足一致性。
◆ 事务满足持久化是为了能应对数据库崩溃的情况。
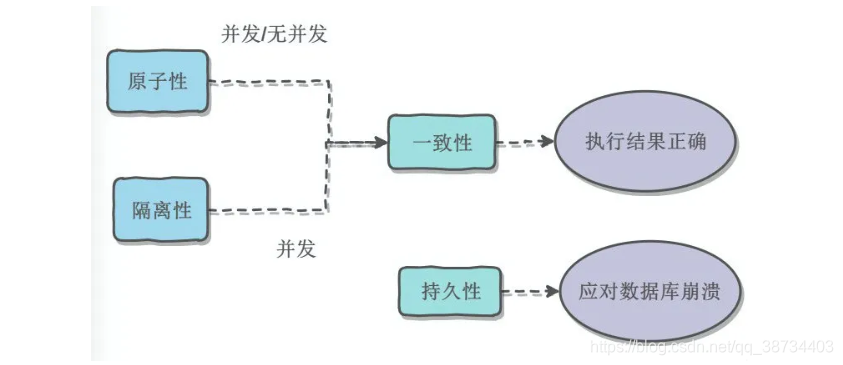
5 无隔离性:多个事务同时执行的问题
1)脏读
◆ 指在一个事务处理过程里读取了另一个未提交的事务中的数据。
◆ A事务在修改数据未提交,B访问并使用了还未提交的数据
2)不可重复读
◆ 指在对于数据库中的某个数据,一个事务范围内多次查询却返回了不同的数据值,这是由于在查询间隔,被另一个事务修改并提交了。
◆ 不可重复读和脏读的区别是,脏读是某一事务读取了另一个事务未提交的脏数据,而不可重复读则是读取了前一事务提交的数据。
◆ A正多次读取同一行数据,B修改了行数据,导致A多次读取的数据不一致
3)幻读
◆ 幻读是事务非独立执行时发生的一种现象。
◆ 如事务A改变了表某字段的值1—>2,事务B新插入一条某字段仍为1的记录
4)丢失更新
◆ A事务和B事务同时修改同一行数据,出现A事务修改内容丢失,修改内容变成B事务修改内容;
◆ 解决:进行行加锁,只允许并发一个更新事务6 默认隔离级别
◆ Mysql默认可重读;
◆ Oracle 默认读已提交,
Oracle 迁移到MySQL,将 MySQL 的隔离级别设置为“读提交”,保证数据库隔离级别的一致7 事务的4个隔离级别及解决问题
--由低到高,级别越高,执行效率就越低
1)read uncommitted(读取未提交):
◆ 概念:一个事务还没提交时,它做的变更就能被别的事务看到。
◆ 任何情况都无法保证,可能会导致脏读、不可重复读或幻读。
2)read committed(读取已提交):
◆ 概念:一个事务提交之后,它做的变更才会被其他事务看到。
◆ 可以阻止脏读,但是幻读或不可重复读仍有可能发生。
3)repeatable read(可重复读):
◆ 概念: 对同一字段的多次读取结果都是一致的,除非数据是被本身事务自己所修改
◆ 可以阻止脏读和不可重复读,但幻读仍有可能发生。
4)serializable(串行化):
◆ 概念:对于同一行记录,“写”会加“写锁”,“读”会加“读锁”,所有的事务依次逐个执行,当出现读写锁冲突的时候,后访问的事务必须等前一个事务执行完成,才能继续执行;
◆ 可以防止脏读、不可重复读以及幻读。8 可重复读的实现原理
--MySQL每条记录在更新的时候都会同时记录一条回滚操作;
--假设一个值从 1 被按顺序改成了 2、3、4,在回滚日志里面就会有类似下面的记录。
1> 实现:
-当前值是 4,但是在查询这条记录的时候,不同时刻启动的事务会有不同的read-view。如图中看到的,在视图 A、B、C 里面,这一个记录的值分别是1、2、4,同一条记录在系统中可以存在多个版本,就是数据库的多版本并发控制(MVCC)。
-对于 read-viewA,要得到1,就必须将当前值依次执行图中所有的回滚操作得到。
2> 发现:
现在有另外一个事务正在将 4 改成 5,这个事务跟 read-view A、B、C 对应的事务是不会冲突的。
3> 回滚日志删除
-回滚日志总不能一直保留吧,什么时候删除呢?答案是,在不需要的时候才删除。也就是说,系统会判断,当没有事务再需要用到这些回滚日志时,回滚日志会被删除。
-什么时候才不需要了呢?就是当系统里没有比这个回滚日志更早的 read-view 的时候。
4> 长事务
基于上面的说明,我们来讨论一下为什么建议你尽量不要使用长事务。长事务意味着系统里面会存在很老的事务视图。由于这些事务随时可能访问数据库里面的任何数据,所以这个事务提交之前,数据库里面它可能用到的回滚记录都必须保留,这就会导致大量占用存储空间。
示例:在 MySQL 5.5 及以前的版本,回滚日志是跟数据字典一起放在 ibdata 文件里的,即使长事务最终提交,回滚段被清理,文件也不会变小。我见过数据只有 20GB,而回滚段有200GB 的库。最终只好为了清理回滚段,重建整个库。除了对回滚段的影响,长事务还占用锁资源,也可能拖垮整个库(锁部分)
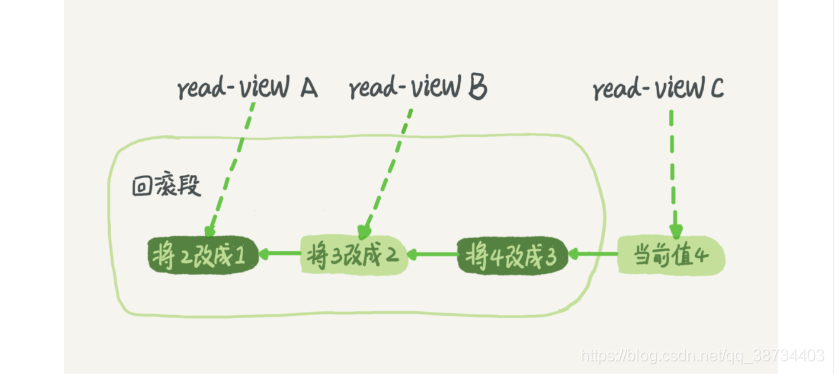
8 可重复读的应用场景
--案例:
假设你在管理一个个人银行账户表。一个表存了每个月月底的余额,一个表存了账单明细。这时候你要做数据校对,也就是判断上个月的余额和当前余额的差额,是否与本月的账单明细一致。你一定希望在校对过程中,即使有用户发生了一笔新的交易,也不影响你的校对结果。
--使用“可重复读”隔离级别,事务启动时的视图可以认为是静态的,不受其他事务更新的影响。读已提交的原理?
多版本并发控制
MVCC其实就是行级锁的一个升级版。我们都知道数据库中有表锁和行锁,在表锁中读写操作是阻塞的,而MVCC的读写一般是不会阻塞的,这样避免了很多加锁过程。
1)隐藏列
Innodb引擎中数据表会有两个隐藏列,客户端不可见,分别是trx_id,创建版本号;和roll_pointer,回滚指针。
其中创建版本号其实就是创建该行数据的事务id。
2)undo log
事务对数据更新操作,会把旧数据行记录在undo log的记录中,在undo log记录数据行、生成这行数据的事务id。
在undo log中和之前的数据行形成一条链表,链表头就是最新的数据,这条链表就叫做版本链.
事务的可见性都是基于这个undo log来实现的
3)ReadView
查询操作时,事务会生成一个ReadView,ReadView是一个事务快照,准确来说是当前时间点系统内活跃的事务列表,也就是说系统内所有未提交的事务,都会记录在这个Readview内,事务就根据它来判断哪些数据是可见的,哪些是不可见的。
查询一条数据时,事务会拿到这个ReadView,去到undo log中进行判断。若查询到某一条数据:
先去查看undo log中的最新数据行,如果数据行的版本号小于ReadView记录的事务id最小值,就说明这条数据对当前数据库是可见的,可以直接作为结果集返回
若数据行版本号大于ReadView记录最大值,说明这条数据是由一个新的事务修改的,对当前事务不可见,那么就顺着版本链继续往下寻找第一条满足条件的
若数据行版本号在ReadView最小值和最大值之间,那么就需要进行遍历了整个ReadView了,如果数据行版本号等于ReadView的某个值,说说明该行数据仍然处于活跃状态,那么对当前事务不可见
读已提交和可重复读的实现
ReadView就是这样来判断数据可见性的。
那又是如何实现读已提交和可重复读呢?其实很简单,就是生成ReadView的时机不同。
对读已提交来说,事务中的每次读操作都会生成一个新的ReadView,也就是说,如果这期间某个事务提交了,那么它就会从ReadView中移除。这样确保事务每次读操作都能读到相对比较新的数据
而对可重复读来说,事务只有在第一次进行读操作时才会生成一个ReadView,后续的读操作都会重复使用这个ReadView。也就是说,如果在此期间有其他事务提交了,那么对于可重复读来说也是不可见的,因为对它来说,事务活跃状态在第一次进行读操作时就已经确定下来,后面不会修改了。
https://blog.csdn.net/SCUTJAY/article/details/1046535999 事务的启动方式
--MySQL 的事务启动几种方式:
① 显式启动事务语句, begin/start transaction。配套的提交语句是 commit,回滚语句是 rollback。
② set autocommit=0,这个命令会将这个线程的自动提交关掉。
如,只执行一个 select 语句,这个事务就启动了,而且并不会自动提交。需要你主动执行 commit 或 rollback 语句,或者断开连接。
--set autocommit=0问题:
如果长连接,会导致意外的长事务;
建议:使用set autocommit=1, 通过显式语句的方式来启动事务。
--使用:autocommit = 1 的情况
用 begin 显式启动的事务,执行 commit 则提交事务。
执行 commit work and chain,则是提交事务并自动启动下一个事务。不需要主动执行一次 “begin”,减少了语句的交互次数。优点:rd明确地知道每个语句是否处于事务中;设置隔离级别
启动参数 transaction-isolation 的值设置成 READ-COMMITTED
比较读提交,重复读性能
https://www.cnblogs.com/hainange/p/6153632.html
undolog(回滚日志)和MVCC
- 《Mysql45-08》|MVCC_ab|MVCC_ab进阶|一致性读视图_ab
1 undo log
--2个作用:回滚和多版本控制(MVCC)
--写:数据修改时,不仅记录redolog,还记录undolog,某些原因导致事务失败或回滚,可用undo log回滚;
--写的例子:相反记录,insert->delete
undolog主要存储的是逻辑日志,如insert一条数据了,则undo log会记录的一条对应的delete日志。相反的对应记录。
--原子性:一个事务包含多个操作,这些操作要么全部执行,要么全都不执行
实现:undolog,与修改的操作相反的记录,达到回滚,保证一致性。
--undo log存储着修改之前的数据,相当于一个前版本,MVCC实现的是读写不阻塞,读的时候只要返回前一个版本的数据就行了。2 事务的启动时机
无特别说明,默认autocommit=1;
--M1:begin/start transaction
此命名非事务的起点,在执行到它们之后的第一个操作InnoDB 表的语句,事务才真正启动。
--M2:transaction with consistent snapshot
可以马上启动一个事务;
--第一种启动方式,一致性视图是在第执行第一个快照读语句时创建的;第二种启动方式,一致性视图是在执行 start transaction with consistentsnapshot 时创建的3 2个视图概念
1)view。
是一个用查询语句定义的虚拟表,在调用的时候执行查询语句并生成结果。创建视图的语法是 create view ... ,而它的查询方法与表一样。
2)一致性读视图
一致性读视图(consistent read view)是InnoDB 在实现 MVCC 时用到的,用于支持 RC(Read Committed,读提交)和 RR(Repeatable Read,可重复读)隔离级别的实现。4 MVCC里的快照实现-版本链
--可重复读隔离级别下,事务在启动的时候就“拍了个快照”。注,这个快照是基于整库的。
--快照的实现:
每行数据也都是有多个版本的。每次事务更新数据的时候,都会生成一个新的数据版本,并且把 transaction id 赋值给这个数据版本的事务 ID,记为 row trx_id。同时,旧的数据版本要保留,并且在新的数据版本中,能够有信息可以直接拿到它。
即,数据表中的一行记录,其实可能有多个版本 (row),每个版本有自己的 row trx_id。
其中,
transaction id:
InnoDB 里面每个事务有一个唯一的事务 ID,叫作 transaction id。它是在事务开始的时候向 InnoDB 的事务系统申请的,是按申请顺序严格递增的。
row trx_id:隐藏列
roll_pointer:隐藏列。每次对某条聚簇索引记录进行改动时,都会把旧的版本写入到undo日志中,然后这个隐藏列就相当于一个指针,可以通过它来找到该记录修改前的信息

--undolog的应用:
undo log的回滚机制也是依靠这个版本链,每次对记录进行改动,都会记录一条undo日志,每条undo日志也都有一个roll_pointer属性(INSERT操作对应的undo日志没有该属性,因为该记录并没有更早的版本),可以将这些undo日志都连起来,串成一个链表,所以现在的情况就像下图一样:
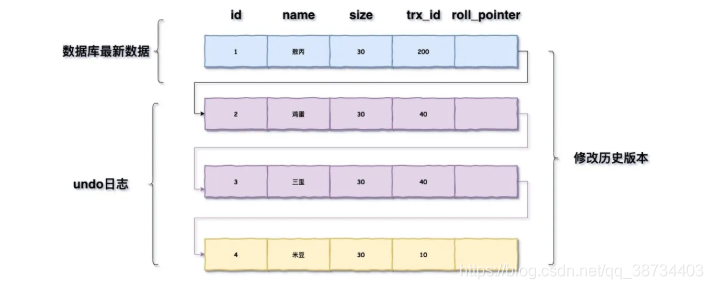
例子
如,一个记录被多个事务连续更新后的状态:
图中的三个虚线箭头,就是 undo log;
V1、V2、V3 并不是物理上真实存在的,而是每次需要的时候根据当前版本和 undo log 计算出来的。
如,需要 V2 的时候,就是通过 V4 依次执行 U3、U2 算出来。
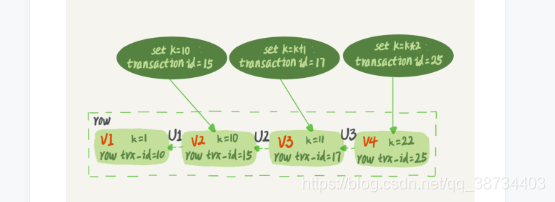
5 如何定义快照-row trx_id的可见性
--问题:100G的库,生成快照,不需要拷贝出这 100G的数据?
--可重复读:根据定义,事务启动的时刻为准,如果一个数据版本是在这启动之前生成的,就认;如果是这启动以后才生成的,我就不认,我必须要找到它的上一个版本;以及自身更新也认;
--一致性视图(read-view)原理:
InnoDB 为每个事务构造了一个数组,用来保存这个事务启动瞬间,当前正活跃(启动还未提交)的所有事务 ID。
① 数组中低水位:事务 ID 的最小值;
高水位:当前系统里面已经创建过的事务 ID 的最大值+1。
② 视图数组和高水位,就组成了当前事务的一致性视图(read-view)。
③ 数据版本的可见性规则:
基于数据的 row trx_id 和这个一致性视图的对比结果得到的。
--视图数组把所有的 row trx_id 分成了几种不同的情况。
对于当前事务的启动瞬间来说,一个数据版本的 row trx_id,有以下几种可能:
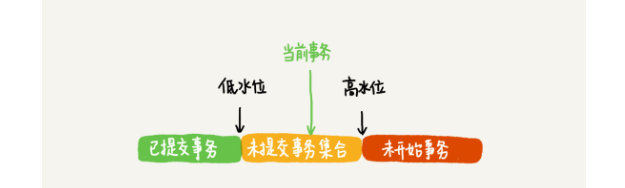
- 如果落在绿色部分,表示这个版本是已提交的事务或者是当前事务自己生成的,这个数据是可见的;
- 如果落在红色部分,表示这个版本是由将来启动的事务生成的,是肯定不可见的;
- 如果落在黄色部分,那就包括两种情况
a. 若 row trx_id 在数组中,表示这个版本是由还没提交的事务生成的,不可见;
b. 若 row trx_id 不在数组中,表示这个版本是已经提交了的事务生成的,可见。
- 计算例子
根据上面数据,如果有一个事务,它的低水位是 18,那么当它访问这一行数据时,就会从 V4 通过 U3 计算出 V3,所以在它看来,这一行的值是 11。 总结
InnoDB 利用了“所有数据都有多个版本”的这个特性,实现了“秒级创建快照”的能力。6 可重复读是怎么实现的?_ab
可重复读,在第一次读取数据时生成一个ReadView,对于使用REPEATABLE READ隔离级别的事务来说,只会在第一次执行查询语句时生成一个ReadView,之后的查询就不会重复生成了,所以一个事务的查询结果每次都是一样的。
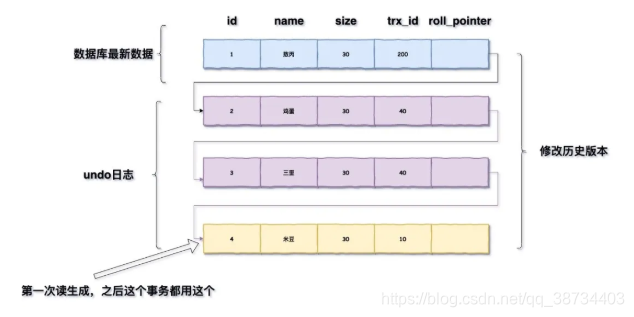
读已提交_ab
--在读提交隔离级别下,这个视图是在每个SQL语句开始执行的时候创建的,在这个隔离级别下,事务在每次查询开始时都会生成一个独立的ReadView。
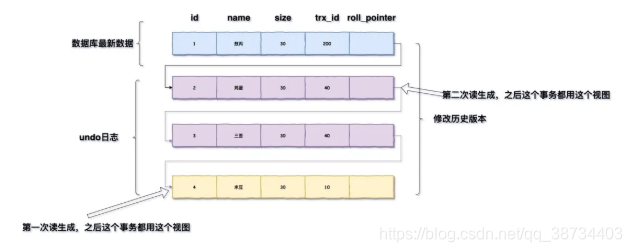
区别
而读提交的逻辑和可重复读的逻辑类似,它们最主要的区别是:
--在可重复读隔离级别下,只需要在事务开始的时候创建一致性视图,之后事务里的其他查询都共用这个一致性视图;
--在读提交隔离级别下,每一个语句执行前都会重新算出一个新的视图。- MVCC(gxn)
- MySQL的大多数事务型存储引擎实现的都不是简单的行级锁。基于提升并发性能的考虑,它们一般都同时实现了多版本并发控制(MVCC)。
- MVCC是行级锁的一个变种,但是它在很多情况下避免了加锁操作,因此开销更低。虽然实现机制有所不同,但大都实现了非阻塞的读操作,写操作也只锁定必要的行。
- MVCC的实现,是通过保存数据在某个时间点的快照来实现的。也就是说,不管需要执行多长时间,每个事务看到的数据都是一致的。根据事务开始的时间不同,每个事务对同一张表,同一时刻看到的数据可能是不一样的。
- 前面说到不同存储引擎的MVCC实现是不同的,典型的有乐观(optimistic)并发控制和悲观(pessimistic)并发控制。下面我们通过InnoDB的简化版行为来说明MVCC是如何工作的。
- InnoDB的MVCC,是通过在每行记录后面保存两个隐藏的列来实现的。这两个列,一个保存了行的创建时间,一个保存行的过期时间(或删除时间)。当然存储的并不是实际的时间值,而是系统版本号(system version number)。每开始一个新的事务,系统版本号都会自动递增。事务开始时刻的系统版本号会作为事务的版本号,用来和查询到的每行记录的版本号进行比较。下面看一下在REPEATABLE READ隔离级别下,MVCC具体是如何操作的。
1)SELECT
InnoDB会根据以下两个条件检查每行记录:
◆ InnoDB只查找版本早于当前事务版本的数据行(也就是,行的系统版本号小于或等于事务的系统版本号),这样可以确保事务读取的行,要么是在事务开始前已经存在的,要么是事务自身插入或者修改过的。
◆ 行的删除版本要么未定义,要么大于当前事务版本号。这可以确保事务读取到的行,在事务开始之前未被删除。
只有符合上述两个条件的记录,才能返回作为查询结果。
2)INSERT
InnoDB为新插入的每一行保存当前系统版本号作为行版本号。
3)DELETE
InnoDB为删除的每一行保存当前系统版本号作为行删除标识。
4)UPDATE
InnoDB为插入一行新记录,保存当前系统版本号作为行版本号,同时保存当前系统版本号到原来的行作为行删除标识。 - 保存这两个额外系统版本号,使大多数读操作都可以不用加锁。这样设计使得读数据操作很简单,性能很好,并且也能保证只会读取到符合标准的行。不足之处是每行记录都需要额外的存储空间,需要做更多的行检查工作,以及一些额外的维护工作。
MVCC只在REPEATABLE READ和READ COMMITTED两个隔离级别下工作。其他两个隔离级别都和MVCC不兼容(4),因为READ UNCOMMITTED总是读取最新的数据行,而不是符合当前事务版本的数据行。而SERIALIZABLE则会对所有读取的行都加锁。
- MVCC
- 多版本并发控制(Multi-Version Concurrency Control, MVCC)是 MySQL 的 InnoDB 存储引擎实现隔离级别的一种具体方式,用于实现提交读和可重复读这两种隔离级别。而未提交读隔离级别总是读取最新的数据行,无需使用MVCC。可串行化隔离级别需要对所有读取的行都加锁,单纯使用 MVCC 无法实现。
- 基础概念
1)版本号
◆ 系统版本号:是一个递增的数字,每开始一个新的事务,系统版本号就会自动递增。
◆ 事务版本号:事务开始时的系统版本号。
2)隐藏的列
MVCC 在每行记录后面都保存着两个隐藏的列,用来存储两个版本号:
◆ 创建版本号:指示创建一个数据行的快照时的系统版本号;
◆ 删除版本号:如果该快照的删除版本号大于当前事务版本号表示该快照有效,否则表示该快照已经被删除了。
3)Undo 日志
MVCC 使用到的快照存储在Undo日志中,该日志通过回滚指针把一个数据行(Record)的所有快照连接起来。
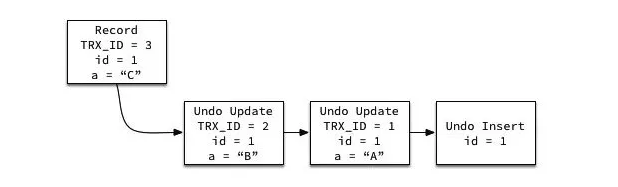
- 实现过程
◆ 以下实现过程针对可重复读隔离级别。
◆ 当开始一个事务时,该事务的版本号肯定大于当前所有数据行快照的创建版本号,理解这一点很关键。数据行快照的创建版本号是创建数据行快照时的系统版本号,系统版本号随着创建事务而递增,因此新创建一个事务时,这个事务的系统版本号比之前的系统版本号都大,也就是比所有数据行快照的创建版本号都大。
1)SELECT
◆ 多个事务必须读取到同一个数据行的快照,并且这个快照是距离现在最近的一个有效快照。但是也有例外,如果有一个事务正在修改该数据行,那么它可以读取事务本身所做的修改,而不用和其它事务的读取结果一致。
◆ 把没有对一个数据行做修改的事务称为T,T所要读取的数据行快照的创建版本号必须小于等于T的版本号,因为如果大于T的版本号,那么表示该数据行快照是其它事务的最新修改,因此不能去读取它。除此之外,T所要读取的数据行快照的删除版本号必须是未定义或者大于T的版本号,因为如果小于等于T的版本号,那么表示该数据行快照是已经被删除的,不应该去读取它。
2)INSERT
将当前系统版本号作为数据行快照的创建版本号。
3)DELETE
将当前系统版本号作为数据行快照的删除版本号。
4)UPDATE
将当前系统版本号作为更新前的数据行快照的删除版本号,并将当前系统版本号作为更新后的数据行快照的创建版本号。可以理解为先执行 DELETE 后执行 INSERT。 快照读与当前读
◆ 在可重复读级别中,通过MVCC机制,虽然让数据变得可重复读,但我们读到的数据可能是历史数据,是不及时的数据,不是数据库当前的数据!这在一些对于数据的时效特别敏感的业务中,就很可能出问题。
◆ 对于这种读取历史数据的方式,我们叫它快照读 (snapshot read),而读取数据库当前版本数据的方式,叫当前读 (current read)。很显然,在MVCC中:
① 快照读
MVCC 的 SELECT 操作是快照中的数据,不需要进行加锁操作。
select * from table ….;
② 当前读
MVCC 其它会对数据库进行修改的操作(INSERT、UPDATE、DELETE)需要进行加锁操作,从而读取最新的数据。可以看到 MVCC 并不是完全不用加锁,而只是避免了 SELECT 的加锁操作。INSERT;UPDATE;DELETE;
在进行 SELECT 操作时,可以强制指定进行加锁操作。以下第一个语句需要加 S 锁,第二个需要加 X 锁。
- select * from table where ? lock in share mode;- select * from table where ? for update;
◆ 事务的隔离级别实际上都是定义的当前读的级别,MySQL为了减少锁处理(包括等待其它锁)的时间,提升并发能力,引入了快照读的概念,使得select不用加锁。而update、insert这些“当前读”的隔离性,就需要通过加锁来实现了。
RC和RR级别事务的实现:一致性视图、MVCC
如何解决脏读
- 在事务B的更新语句上面加上一把 X 锁,这样就可以有效的解决脏读问题。
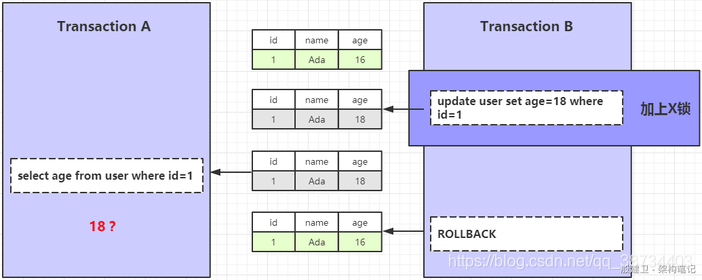
- 读已提交_ab
--在读提交隔离级别下,这个视图是在每个SQL语句开始执行的时候创建的,在这个隔离级别下,事务在每次查询开始时都会生成一个独立的新的ReadView。
如何解决不可重复读
- 在事务A的查询语句上面加上一把 S 锁,事务B的更新操作将会被阻塞,这样就可以有效的解决不可重复读的问题。
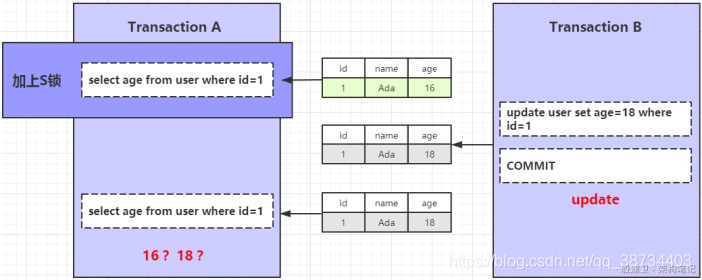
6 可重复读是怎么实现的?_ab
可重复读,在第一次读取数据时生成一个ReadView,对于使用REPEATABLE READ隔离级别的事务来说,只会在第一次执行查询语句时生成一个ReadView,之后的查询就不会重复生成了,所以一个事务的查询结果每次都是一样的。(SELECT都会复用这个 Read view)
区别
而读提交的逻辑和可重复读的逻辑类似,它们最主要的区别是:
--在可重复读隔离级别下,只需要在事务开始的时候创建一致性视图,之后事务里的其他查询都共用这个一致性视图;
--在读提交隔离级别下,每一个语句执行前都会重新算出一个新的视图。
如何解决幻读
- 可重复读级别下,通过 MVCC + Next-Key Locking 防止幻读。
- RR的隔离级别下,Innodb使用MVCC和next-key locks解决幻读,MVCC解决的是普通读(快照读)的幻读,next-key locks解决的是当前读情况下的幻读。
- 当前读,指的是加锁的select(S或者X), update,delete等语句。在RR的事务隔离级别下,数据库会使用next-key locks来锁住本条记录以及索引区间。
- 在事务A的查询语句上面加上一把 Next-key 锁,通过临键锁的定义,可以知道这个时候,事务A会把 (-∞,+∞) 的区间数据都锁住,事务B的新增操作将会被阻塞,这样就可以有效的解决幻读的问题。
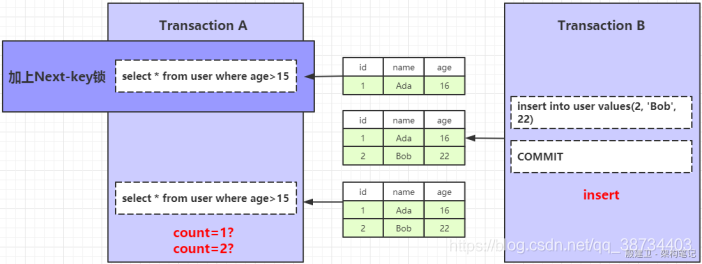
锁
说一下你了解的锁
排他锁、共享锁、意向锁
记录锁、间隙锁、临键锁
乐观锁、悲观锁、
自增锁
行锁、表锁


加锁-首先要知道DB加了那些锁 --锁监控
作用:满足事务隔离性 保证并发锁怎么看
show enfine innodb status\G 当前存储引擎的状态
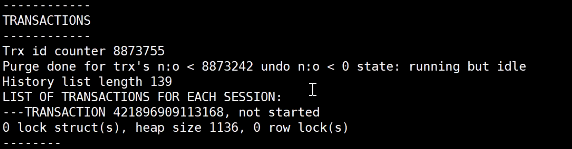
完整的:(此处有其他操作)

show profile for query 1 (1 为id)
show profiles
慢慢被淘汰
替换为:perfomance_schema(开发可以稍微忽略先)
87张表,监控信息
innodb锁
- 官网
- --在 InnoDB 存储引擎中,SELECT 操作的不可重复读问题通过 MVCC 得到了解决,而 UPDATE、DELETE 的不可重复读问题通过 Record Lock解决,INSERT的不可重复读问题是通过 Next-Key Lock(Record Lock + Gap Lock)解决的。
- --快照读(snapshot read):普通的 select ... 操作都是快照读,读取的数据可能是历史快照数据,不是数据库最新的数据,快照读是通过 MVCC 和 Undo Log 实现的。
当前读(current read):读取的是数据库中最新版本的数据,如下操作都是当前读:
• select … lock in share mode
• select … for update
• insert ...
• update ...
• delete ...
快照读是不需要执行加锁操作的,只有当前读才会导致 InnoDB 加锁。 - 分类
Shared and Exclusive Locks--共享锁和排它锁 -行锁
Intention Locks -- 意向锁 -表锁
Record Locks -- 记录锁
Gap Locks -- 间隙锁
Next-Key Locks -- 临键锁
Insert Intention Locks -- 插入意向锁
AUTO-INC Locks -- 自增锁 -表锁
Predicate Locks for Spatial Indexes -- 空间索引的谓词锁 - 锁的类型:
S(shared lock):共享锁,行锁 (...LOCK IN SHARE MODE;)
X(exclusive lock):排它锁,行锁 (...FOR UPDATE)
IS(intention shared lock):意向锁共享锁,表锁
IX(intention exclusive lock):意向锁排它锁,表锁
AUTO-INC Locks:自增锁 - 加锁解锁过程
加锁过程:一般数据库中的加锁操作是从上往下,逐层进行加锁的,它不是只对某条记录进行加锁。(库、页、表、行)
锁的释放过程:锁释放的过程和加锁的过程是反过来的,是先释放记录锁,再释放页锁,再释放表锁,最后释放数据库锁。 - 多粒度锁:多粒度锁的意思是在数据库中不但能实现行级别的锁,也能实现页级别的锁、表级别的锁和数据库级别的锁。
- 层层加锁这些操作都是内存中完成的,锁的信息是存放在内存中的,所以是很快的。
- 行锁到底锁了什么
InnoDB 的行锁是通过给索引上的索引项加锁来实现的。
只有通过索引条件进行数据检索,InnoDB 才使用行级锁,否则,InnoDB 将使用表锁。 - InnoDB 锁的算法
• 记录锁:Record Locks
• 间隙锁:Gap Locks
• 临键锁:Next-key Locks - 临键锁(Next-Key Locks)-InnoDB默认锁算法--防止幻读
定义:当 SQL 执行按照索引进行数据的检索时,查询条件为范围查找(between and、<、>等)并有数据命中,则此时 SQL 语句加上的锁为 Next-key locks,锁住索引的记录 + 区间(左开右闭)。 - 间隙锁(Gap Locks)
定义:当 SQL 执行按照索引进行数据的检索时,查询条件的数据不存在,这时 SQL 语句加上的锁即为 Gap locks,锁住数据不存在的区间(左开右开)
Gap 只在 RR 事务隔离级别存在。因为幻读问题是在 RR 事务通过临键锁和 MVCC 解决的,而临键锁=间隙锁+记录锁,所以间隙锁只在 RR 事务隔离级别存在。 - 记录锁(Record Locks)
定义:当 SQL 执行按照唯一性(Primary key、Unique key)索引进行数据的检索时,查询条件等值匹配且查询的数据是存在,这时 SQL 语句加上的锁即为记录锁 Record Locks,锁住具体的索引项。
当 SQL 执行按照普通索引进行数据的检索时,查询条件等值匹配且查询的数据是存在,这时 SQL 语句锁住数据存在区间(左开右开) - innodb什么情况下使用行锁和表锁?
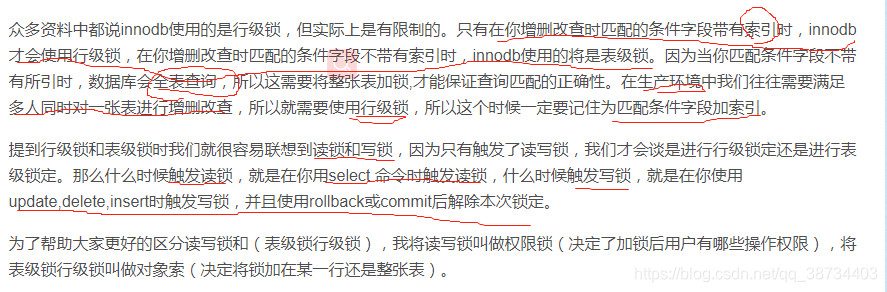
全局锁|表锁|行锁
- 《Mysql45-06》
- 1 锁分类
全局锁、表锁、行锁 2 全局锁
--概念:全局锁就是对整个数据库实例加锁。让整个库处于只读状态。
--命令:Flush tables with read lock (FTWRL)
--典型使用场景:做全库逻辑备份。
--备份不加锁导致问题:不能拿到一致性视图
--备份解决:
① 可重复读隔离级别
可重复读隔离级别下开启一个事务。
官方自带的逻辑备份工具是 mysqldump。当 mysqldump 使用参数–single-transaction的时候,导数据之前就会启动一个事务,来确保拿到一致性视图。而由于 MVCC 的支持,这个过程中数据是可以正常更新的。
---single-transaction 方法只适用于所有的表使用事务引擎的库
② 全局锁(FTWRL)
---用于:对于 MyISAM 这种不支持事务的引擎,如果备份过程中有更新,总是只能取到最新的数据,那么就破坏了备份的一致性。
③ 为什么不用 set global readonly=true?
一是,在有些系统中,readonly 的值会被用来做其他逻辑,比如用来判断一个库是主库还是备库。因此,修改 global 变量的方式影响面更大,不建议使用。
二是,在异常处理机制上有差异。执行 FTWRL 命令之后由于客户端发生异常断开,那么 MySQL 会自动释放这个全局锁,整个库回到可以正常更新的状态。而将整个库设置为 readonly 之后,如果客户端发生异常,则数据库就会一直保持 readonly 状态,这样会导致整个库长时间处于不可写状态,风险较高。3 表级锁
- 1)表级锁分类
表锁、元数据锁(metadata lock,MDL) - 2)表锁
--语法:
lock tables ... read/write
FTWRL 类似,可以用 unlock tables 主动释放锁,也可以在客户端断开的时候自动释放。
--例子:
线程 A 中执行 lock tables t1 read, t2 write;
其他线程写 t1、读写 t2 的语句都会被阻塞;
线程 A 在执行 unlock tables 之前,也只能执行读 t1、读写 t2 的操作。连写 t1 都不允许,自然也不能访问其他表。
---lock tables 语法除了会限制别的线程的读写外,也限定了本线程接下来的操作对象 3)MDL
--MDL 不需要显式使用,在访问一个表的时候会被自动加上。
--作用:保证读写的正确性。
--在 MySQL 5.5 版本中引入了 MDL,当对一个表做增删改查操作的时候,加 MDL读锁;当要对表做结构变更操作的时候,加 MDL 写锁。
--读锁之间不互斥,读写锁之间、写锁之间是互斥的(针对一张表)
--缺陷:
事务中的 MDL 锁,在语句执行开始时申请,但是语句结束后并不会马上释放,而会等到整个事务提交后再释放。
频繁提交,导致不释放,这个库的线程会爆满4 行锁
- 1)引入
--MySQL 的行锁是在引擎层由各个引擎自己实现的。
不支持行锁意味着并发控制只能使用表锁,对于这种引擎的表,同一张表上任何时刻只能有一个更新在执行,这就会影响到业务并发度。
--概念:
行锁就是针对数据表中行记录的锁。这很好理解,比如事务 A 更新了一行,而这时候事务 B 也要更新同一行,则必须等事务 A 的操作完成后才能进行更新。 - 2)两阶段锁
--两阶段锁协议:
InnoDB 事务中,行锁是在需要的时候才加上的,但并不是不需要了就立刻释放,而是要等到事务结束时才释放。
--与事务的关联:
如果你的事务中需要锁多个行,要把最可能造成锁冲突、最可能影响并发度的锁尽量往后放。 - 3)死锁
--事务 A 在等待事务 B 释放 id=2 的行锁,而事务 B 在等待事务 A 释放 id=1 的行锁。 事务 A 和事务 B 在互相等待对方的资源释放,就是进入了死锁状态。

--解决:
① 一种策略是,直接进入等待,直到超时。这个超时时间可以通过参数innodb_lock_wait_timeout 来设置。
② 另一种策略是,主动死锁检测:发起死锁检测,发现死锁后,主动回滚死锁链条中的某一个事务,让其他事务得以继续执行。将参数 innodb_deadlock_detect 设置为 on,表示开启这个逻辑。
---InnoDB 中,innodb_lock_wait_timeout 的默认值是 50s; 4)热点行更新导致的性能问题
--问题:
假设有 1000 个并发线程要同时更新同一行,那么死锁检测操作就是100 万这个量级的。虽然最终检测的结果是没有死锁,但是这期间要消耗大量的 CPU 资源。因此,你就会看到 CPU 利用率很高,但是每秒却执行不了几个事务。
---问题的症结在于,死锁检测要耗费大量的 CPU 资源。
---一种头痛医头的方法,就是如果你能确保这个业务一定不会出现死锁,可以临时把死锁检测关掉。有风险
---另一个思路是控制并发度。
这个并发控制要做在数据库服务端。如果你有中间件,可以考虑在中间件实现;如果你的团队有能修改 MySQL 源码的人,也可以做在 MySQL 里面。基本思路就是,对于相同行的更新,在进入引擎之前排队。这样在 InnoDB 内部就不会有大量的死锁检测工作了。
简化,可以考虑通过将一行改成逻辑上的多行来减少锁冲突。1 锁分类
--锁分类:按锁的粒度
行级锁(INNODB引擎)、表级锁(MYISAM引擎)和页级锁(BDB引擎)
--存储引擎锁使用:
◆ MyISAM采用表级锁(table-level locking)。
◆ InnoDB支持行级锁(row-level locking)和表级锁,默认为行级锁
--锁的粒度取决于具体的存储引擎,InnoDB实现了行级锁,页级锁,表级锁。
加锁开销从大到小,并发能力也是从大到小。行级锁,表级锁和页级锁对比
1)行级锁 **
◆ 行级锁是Mysql中锁定粒度最细的一种锁,表示只针对当前操作的行进行加锁。行级锁能大大减少数据库操作的冲突。其加锁粒度最小,但加锁的开销也最大。行级锁分为共享锁 和 排他锁。
◆ 特点:开销大,加锁慢;会出现死锁;锁定粒度最小,发生锁冲突的概率最低,并发度也最高。
**2)表级锁
◆ 表级锁是MySQL中锁定粒度最大的一种锁,表示对当前操作的整张表加锁,它实现简单,资源消耗较少,被大部分MySQL引擎支持。最常使用的MYISAM与INNODB都支持表级锁定。表级锁定分为表共享读锁(共享锁)与表独占写锁(排他锁)。
◆ 特点:开销小,加锁快;不会出现死锁;锁定粒度大,发出锁冲突的概率最高,并发度最低。
3)页级锁
页级锁是MySQL中锁定粒度介于行级锁和表级锁中间的一种锁。表级锁速度快,但冲突多,行级冲突少,但速度慢。所以取了折衷的页级,一次锁定相邻的一组记录。
◆ 特点:开销和加锁时间界于表锁和行锁之间;会出现死锁;锁定粒度界于表锁和行锁之间,并发度一般3 锁的类别上分MySQL锁分类
--从锁的类别上来讲,有共享锁和排他锁。
--共享锁: 又叫做读锁。 当用户要进行数据的读取时,对数据加上共享锁。共享锁可以同时加上多个。
--排他锁: 又叫做写锁。 当用户要进行数据的写入时,对数据加上排他锁。排他锁只可以加一个,他和其他的排他锁,共享锁都相斥。
--用上面的例子来说就是用户的行为有两种,一种是来看房,多个用户一起看房是可以接受的。 一种是真正的入住一晚,在这期间,无论是想入住的还是想看房的都不可以。4 InnoDB存储引擎的三种锁算法
◆ Record lock:单个行记录上的锁 -记录锁
-- 锁定一个记录上的索引,而不是记录本身。
-- 如果表没有设置索引,InnoDB 会自动在主键上创建隐藏的聚簇索引,因此 Record Locks 依然可以使用。
◆ Gap lock:间隙锁,锁定一个范围,不包括记录本身
-- 锁定索引之间的间隙,但是不包含索引本身。例如当一个事务执行以下语句,其它事务就不能在 t.c 中插入 15。
-- SELECT c FROM t WHERE c BETWEEN 10 and 20 FOR UPDATE;
◆ Next-key lock:record+gap 锁定一个范围,包含记录本身
-- 它是 Record Locks 和 Gap Locks 的结合,不仅锁定一个记录上的索引,也锁定索引之间的间隙。
-- next-key锁其实包含了记录锁和间隙锁,即锁定一个范围,并且锁定记录本身,InnoDB默认加锁方式是next-key 锁。
-- 例如一个索引包含以下值:10, 11, 13, and 20,那么就需要锁定以下区间:
(-∞, 10]
(10, 11]
(11, 13]
(13, 20]
(20, +∞)- 相关知识点:
① innodb对于行的查询使用next-key lock
② Next-locking keying为了解决Phantom Problem幻读问题
③ 当查询的索引含有唯一属性时,将next-key lock降级为record key
④ Gap锁设计的目的是为了阻止多个事务将记录插入到同一范围内,而这会导致幻读问题的产生
⑤ 有两种方式显式关闭gap锁:(除了外键约束和唯一性检查外,其余情况仅使用record lock)
A. 将事务隔离级别设置为RC B.将参数innodb_locks_unsafe_for_binlog设置为1 在 InnoDB 存储引擎中,SELECT 操作的不可重复读问题通过 MVCC 得到了解决,而 UPDATE、DELETE 的不可重复读问题通过 Record Lock 解决,INSERT的不可重复读问题是通过 Next-Key Lock(Record Lock + Gap Lock)解决的。
4 使用实现
1)行锁?
--MySQL中InnoDB引擎基于索引来完成行锁
-- 例: select * from tab_with_index where id = 1 for update;
for update 可以根据条件来完成行锁锁定,并且 id 是有索引键的列,如果 id 不是索引键那么InnoDB将完成表锁,并发将无从谈起- 2) Mysql要加上nextkey锁语句
-- next-key锁的作用是为了防止幻读,导致主从复制的不一致。当我们具体where条件指定某一个值时,它也会锁住这个值的前后范围。 比如有一个表child,id列上有90,100,102,
-- 当我们执行select * from chlid where id=100 for update 时,mysql会锁住90到102这个区间,一开始有点疑惑就是其实mysql只需要去锁定id=100这个值就可以防止幻读了,为什么还要去锁定相邻的区间范围呢?
这是为了预防另一种情况的发生。
-- 比如当我们执行 select * from chlid where id>100 for update时,这时next-key锁就派上用场了。
索引扫描到了100和102这两个值,但是仅仅锁住这两个值是不够的,因为当我们在另一个会话插入id=101的时候,就有可能产生幻读了。
所以mysql必须锁住[100,102)和[102,无穷大)这个范围,才能保证不会出现幻读。5 隔离级别与锁的关系
-- 在Read Uncommitted级别下,读取数据不需要加共享锁,这样就不会跟被修改的数据上的排他锁冲突
-- 在Read Committed级别下,读操作需要加共享锁,但是在语句执行完以后释放共享锁;
--在Repeatable Read级别下,读操作需要加共享锁,但是在事务提交之前并不释放共享锁,也就是必须等待事务执行完毕以后才释放共享锁。
-- SERIALIZABLE 是限制性最强的隔离级别,因为该级别锁定整个范围的键,并一直持有锁,直到事务完成。6 死锁以及解决
--死锁是指两个或多个事务在同一资源上相互占用,并请求锁定对方的资源,从而导致恶性循环的现象。
--常见的解决死锁的方法
1)如果不同程序会并发存取多个表,尽量约定以相同的顺序访问表,可以大大降低死锁机会。
2)在同一个事务中,尽可能做到一次锁定所需要的所有资源,减少死锁产生概率;
3)对于非常容易产生死锁的业务部分,可以尝试使用升级锁定颗粒度,通过表级锁定来减少死锁产生的概率;
如果业务处理不好可以用分布式事务锁或者使用乐观锁乐观锁和悲观锁,实现
- 数据库管理系统(DBMS)中的并发控制的任务是确保在多个事务同时存取数据库中同一数据时不破坏事务的隔离性和统一性以及数据库的统一性。乐观并发控制(乐观锁)和悲观并发控制(悲观锁)是并发控制主要采用的技术手段。
◆ 悲观锁:假定会发生并发冲突,屏蔽一切可能违反数据完整性的操作。在查询完数据的时候就把事务锁起来,直到提交事务。实现方式:使用数据库中的锁机制
◆ 乐观锁:假设不会发生并发冲突,只在提交操作时检查是否违反数据完整性。在修改数据的时候把事务锁起来,通过version的方式来进行锁定。实现方式:乐一般会使用版本号机制或CAS算法实现。 两种锁的使用场景
◆ 从上面对两种锁的介绍,我们知道两种锁各有优缺点,不可认为一种好于另一种,像乐观锁适用于写比较少的情况下(多读场景),即冲突真的很少发生的时候,这样可以省去了锁的开销,加大了系统的整个吞吐量。
◆ 但如果是多写的情况,一般会经常产生冲突,这就会导致上层应用会不断的进行retry,这样反倒是降低了性能,所以一般多写的场景下用悲观锁就比较合适。- 了解mysql的间隙锁?
- next key锁
死锁
- 死锁的介绍
• 多个并发事务(2个或者以上);
• 每个事务都持有锁(或者是已经在等待锁);
• 每个事务都需要再继续持有锁;
• 事务之间产生加锁的循环等待,形成死锁。 - 死锁的避免
• 类似的业务逻辑以固定的顺序访问表和行。
• 大事务拆小。大事务更倾向于死锁,如果业务允许,将大事务拆小。
• 在同一个事务中,尽可能做到一次锁定所需要的所有资源,减少死锁概率。
• 降低隔离级别,如果业务允许,将隔离级别调低也是较好的选择
• 为表添加合理的索引。可以看到如果不走索引将会为表的每一行记录添加上锁(或者说是表锁)
索引_树
- b、b+的插入删除|
页的概念:
大小与操作系统有关,一般4k、8k,4的倍数,innodb默认16k(具体一页有多大数据跟操作系统有关);读取一页内的数据时候,实际上才发生了一次IO。二分查找的复杂度:O(log2n)
1 二叉树
二叉查找树的特点就是左子树的节点值比父亲节点小,而右子树的节点值比父亲节点大:
-- 在查找某个节点的时候,可以采取类似于二分查找的思想,快速找到某个节点。n个节点的二叉查找树,正常的情况下,查找的时间复杂度为 O(logn)。
-- 保证每次查找都可以这折半而减少IO次数;

极端情况:之所以说是正常情况下,是因为二叉查找树有可能出现一种极端的情况:
-- 此时的二叉查找树已经近似退化为一条链表,查找时间复杂度顿时变成了O(n)。由此必须防止这种情况发生,为了解决这个问题,于是引申出了平衡二叉树。
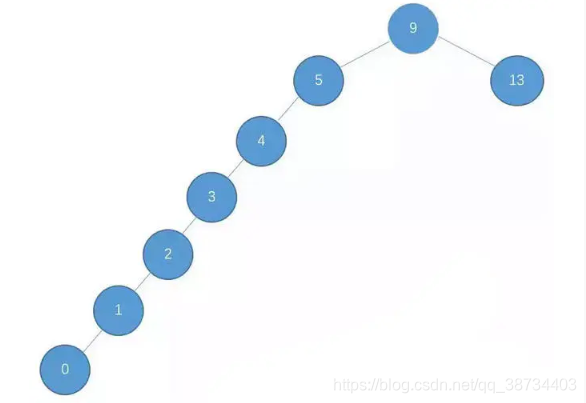
2 平衡二叉树
1)概念平衡二叉树是基于二分法的策略提高数据的查找速度的二叉树的数据结构。
-- 平衡二叉树是采用二分法思维,平衡二叉查找树除了具备二叉树的特点,最主要的特征是树的左右两个子树的层级最多相差1。在插入删除数据时通过左旋/右旋操作保持二叉树的平衡,不会出现左子树很高、右子树很矮的情况。
-- 平衡二叉查找树查询的性能接近于二分查找法,时间复杂度是O(log2n)。
2)规则
平衡二叉树是采用二分法思维把数据按规则组装成一个树形结构的数据,用这个树形结构的数据减少无关数据的检索,大大的提升了数据检索的速度;平衡二叉树的数据结构组装过程有以下规则:
① 非叶子节点只能允许最多两个子节点存在。
② 每一个非叶子节点数据分布规则为左边的子节点小当前节点的值,右边的子节点大于当前节点的值(这里值是基于自己的算法规则而定的,比如hash值)。

平衡树的层级结构:
平衡二叉树的查询性能和树的层级(高度h)成反比,h值越小查询越快。为了保证树的结构左右两端数据大致平衡。降低二叉树的查询难度一般会采用一种算法机制实现节点数据结构的平衡,实现了这种算法的有比如Treap、红黑树。使用平衡二叉树能保证数据的左右两边的节点层级相差不会大于1,通过这样避免树形结构由于删除增加变成线性链表影响查询效率,保证数据平衡的情况下查找数据的速度近于二分法查找:

3)平衡二叉树特点:
① 非叶子节点最多拥有两个子节点。
② 非叶子节点值大于左边子节点、小于右边子节点。
③ 树的左右两边的层级数相差不会大于1。
④ 没有值相等重复的节点。
适用场景:
平衡二叉树,一般是用平衡因子差值决定并通过旋转来实现,左右子树树高差不超过1,那么和红黑树比较,它是严格的平衡二叉树,平衡条件非常严格(树高差只有1),只要插入或删除不满足上面的条件就要通过旋转来保持平衡。由于旋转是非常耗费时间的。所以 AVL树适用于插入/删除次数比较少,但查找多的场景。
--存在问题:
① 时间复杂度和树高相关。
树有多高就需要检索多少次,每个节点的读取,都对应一次磁盘 IO 操作。树的高度就等于每次查询数据时磁盘 IO 操作的次数。磁盘每次寻道时间为10ms,在表数据量大时,查询性能就会很差。(1百万的数据量,log2n约等于20次磁盘IO,时间20*10=0.2s)
② 平衡二叉树不支持范围查询快速查找,范围查询时需要从根节点多次遍历,查询效率不高。3 红黑树
1)为什么有了平衡树还需要红黑树?
虽然平衡树解决了二叉查找树退化为近似链表的缺点,能够把查找时间控制在O(logn),不过却不是最佳的,因为平衡树要求每个节点的左子树和右子树的高度差至多等于1,这个要求实在是太严了,导致每次进行插入/删除节点的时候,几乎都会破坏平衡树的第二个规则,进而都需要通过左旋和右旋来进行调整,使之再次成为一颗符合要求的平衡树。
2)红黑树的特性
显然,如果在插入、删除很频繁的场景中,平衡树需要频繁调整,这会使平衡树的性能大打折扣,为了解决这个问题,于是有了红黑树,红黑树具有如下特点:
① 每个节点或者是黑色,或者是红色。
② 根节点是黑色。
③ 每个叶子节点(NIL)是黑色。 [注意:这里叶子节点,是指为空(NIL或NULL)的叶子节点]
④ 如果一个节点是红色的,则它的子节点必须是黑色的。
⑤ 从一个节点到该节点的子孙节点的所有路径上包含相同数目的黑节点。[这里指到叶子节点的路径]
-- 包含n个内部节点的红黑树的高度是 O(log(n))。如图:

3)红黑树的使用场景
-- java中使用到红黑树的有TreeSet和JDK1.8的HashMap。红黑树的插入和删除都要满足以上5个特性,操作非常复杂,为什么要使用红黑树?
原因:红黑树是一种平衡树,复杂的定义和规则都是为了保证树的平衡性。如果树不保证平衡性就是下图:很显然这就变成一个链表了。

-- 保证平衡性的最大的目的就是降低树的高度,因为树的查找性能取决于树的高度。所以树的高度越低搜索的效率越高!通过对从根节点到叶子节点路径上各个节点的颜色进行约束,确保没有一条路径会比其他路径长2倍,因而是近似平衡的。所以相对于严格要求平衡的AVL树来说,它的旋转保持平衡次数较少。适合,查找少,插入/删除次数多的场景。(现在部分场景使用跳表来替换红黑树,可搜索“为啥 redis 使用跳表(skiplist)而不是使用 red-black?”)
改造二叉树:为什么引入B树
MySQL的数据是存储在磁盘文件中的,查询处理数据时,需要先把磁盘中的数据加载到内存中,磁盘IO操作非常耗时,所以优化的重点就是尽量减少磁盘IO操作。访问二叉树的每个节点就会发生一次IO,如果想要减少磁盘IO操作,就需要尽量降低树的高度。那如何降低树的高度呢?
--假如key为bigint=8字节,每个节点有两个指针,每个指针为4个字节,一个节点占用的空间16个字节(8+4*2=16)。
--因为在MySQL的InnoDB存储引擎一次IO会读取的一页(默认一页16K)的数据量,而二叉树一次IO有效数据量只有16字节,空间利用率极低。为了最大化利用一次IO空间,一个简单的想法是在每个节点存储多个元素,在每个节点尽可能多的存储数据。每个节点可以存储1000个索引(16k/16=1000),这样就将二叉树改造成了多叉树,通过增加树的叉树,将树从高瘦变为矮胖。构建1百万条数据,树的高度只需要2层就可以(1000*1000=1百万),也就是说只需要2次磁盘IO就可以查询到数据。磁盘IO次数变少了,查询数据的效率也就提高了。
--这种数据结构我们称为B树,B树是一种多叉平衡查找树4 B树(B-tree)
B树和B-tree,其实是同一种树。
--B树的定义
B树(Balance Tree)也称B-树,它是一颗多路平衡查找树。我们描述一颗B树时需要指定它的阶数,阶数表示了一个结点最多有多少个孩子结点,一般用字母m表示阶数。当m取2时,就是我们常见的二叉搜索树。
一颗m阶的B树定义如下:
1)每个结点最多有m-1个关键字。
2)根结点最少可以只有1个关键字。
3)非根结点至少有Math.ceil(m/2)-1个关键字。
4)每个结点中的关键字都按照从小到大的顺序排列,每个关键字的左子树中的所有关键字都小于它,而右子树中的所有关键字都大于它。
5)所有叶子结点都位于同一层,或者说根结点到每个叶子结点的长度都相同。
-- 图示:一棵阶数为4的B树。
阶数m:在实际应用中的B树的阶数m都非常大(通常大于100),所以即使存储大量的数据,B树的高度仍然比较小。
节点:每个结点中存储了关键字(key)和关键字对应的数据(data),以及孩子结点的指针。将一个key和其对应的data称为一个记录。但为了方便描述,除非特别说明,后续文中就用key来代替(key,value)键值对这个整体。在数据库中我们将B树(和B+树)作为索引结构,可以加快查询速速,此时B树中的key就表示键,而data表示了这个键对应的条目在硬盘上的逻辑地址。

1)概念
-- 与平衡二叉树稍有不同的是,B树属于多叉树又名平衡多路查找树(查找路径不只两个),数据库索引技术里大量使用B树和B+树的数据结构。
-- 主要特点:
① B树的节点中存储着多个元素,每个内节点有多个分叉。
② 节点中的元素包含键值和数据,节点中的键值从大到小排列。也就是说,在所有的节点都储存数据。
③ 父节点当中的元素不会出现在子节点中。
④ 所有的叶子结点都位于同一层,叶节点具有相同的深度,叶节点之间没有指针连接。
2)规则
① 排序方式:所有节点关键字是按递增次序排列,并遵循左小右大原则。
② 子节点数:非叶子节点的子节点数>1,且<=M,且M>=2,空树除外(注:M阶代表一个树节点最多有多少个查找路径,M=M路,当M=2则是2叉树,M=3则是3叉)。
③ 关键字数:枝节点的关键字数量大于等于ceil(m/2)-1个且小于等于M-1个(注:ceil()是个朝正无穷方向取整的函数。如ceil(1.1)结果为2)。
④ 所有叶子节点均在同一层、叶子节点除了包含了关键字和关键字记录的指针外也有指向其子节点的指针只不过其指针地址都为null对应下图最后一层节点的空格子。
3)b树查询数据的流程:
-- 假如我们查询值等于10的数据。查询路径磁盘块1->磁盘块2->磁盘块5。
① 第一次磁盘IO:将磁盘块1加载到内存中,在内存中从头遍历比较,10<15,走左路,到磁盘寻址磁盘块2。
② 第二次磁盘IO:将磁盘块2加载到内存中,在内存中从头遍历比较,7<10,到磁盘中寻址定位到磁盘块5。
③ 第三次磁盘IO:将磁盘块5加载到内存中,在内存中从头遍历比较,10=10,找到10,取出data,如果data存储的行记录,取出data,查询结束。如果存储的是磁盘地址,还需要根据磁盘地址到磁盘中取出数据,查询终止。
-- 相比二叉平衡查找树:
在整个查找过程中,虽然数据的比较次数并没有明显减少,但是磁盘IO次数会大大减少。同时,由于我们的比较是在内存中进行的,比较的耗时可以忽略不计。B树的高度一般2至3层就能满足大部分的应用场景,所以使用B树构建索引可以很好的提升查询的效率。

-- B树索引查询过程:

4)️B树的插入节点流程
定义一个5阶树(平衡5路查找树),现在要把3、8、31、11、23、29、50、28这些数字构建出一个5阶树出来。遵循规则:
①节点拆分规则:当前是要组成一个5路查找树,那么此时m=5,关键字数必须<=5-1(这里关键字数>4就要进行节点拆分)。
②排序规则:满足节点本身比左边节点大,比右边节点小。

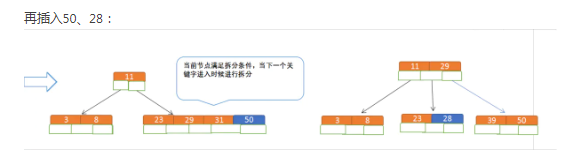
5)B树节点的删除
规则:
①节点合并规则:当前是要组成一个5路查找树,那么此时m=5,关键字数必须大于等于ceil(5/2)(这里关键字数<2就要进行节点合并)。
②满足节点本身比左边节点大,比右边节点小的排序规则。
③关键字数小于二时先从子节点取,子节点没有符合条件时就向父节点取,取中间值往父节点放。
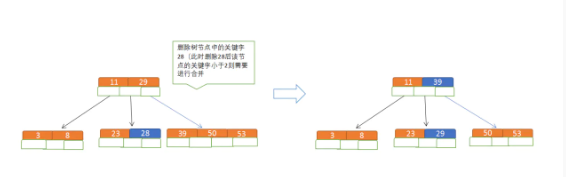
特点:
B树相对于平衡二叉树的不同是,每个节点包含的关键字增多了,特别是在B树应用到数据库中的时候,数据库充分利用了磁盘块的原理(磁盘数据存储是采用块的形式存储的,每个块的大小为4K,每次IO进行数据读取时,同一个磁盘块的数据可以一次性读取出来)把节点大小限制和充分使用在磁盘快大小范围;把树的节点关键字增多后树的层级比原来的二叉树少了,减少数据查找的次数和复杂度。
b树的缺点:
1)B树不支持范围查询的快速查找,你想想这么一个情况如果我们想要查找10和35之间的数据,查找到15之后,需要回到根节点重新遍历查找,需要从根节点进行多次遍历,查询效率有待提高。
2)如果data存储的是行记录,行的大小随着列数的增多,所占空间会变大。这时,一个页中可存储的数据量就会变少,树相应就会变高,磁盘IO次数就会变大。6 B+树
1)概念
-- B+ Tree 是 B 树的一种变形、升级,它是基于 B Tree 和叶子节点顺序访问指针进行实现,通常用于数据库和操作系统的文件系统中。B+树更充分的利用了节点的空间,让查询速度更加稳定,其速度完全接近于二分法查找。
-- B+ 树有两种类型的节点:内部节点(也称索引节点)和叶子节点,内部节点就是非叶子节点,内部节点不存储数据,只存储索引,数据都存在叶子节点。
-- 内部节点中的 key 都按照从小到大的顺序排列,对于内部节点中的一个 key,左子树中的所有 key 都小于它,右子树中的 key 都大于等于它,叶子节点的记录也是按照从小到大排列的。
-- 每个叶子节点都存有相邻叶子节点的指针。
-- B+树和B树最主要的区别在于非叶子节点是否存储数据的问题:
B树:非叶子节点和叶子节点都会存储数据。
B+树:只有叶子节点才会存储数据,非叶子节点至存储键值。叶子节点之间使用双向指针连接,最底层的叶子节点形成了一个双向有序链表。

-- B+树的最底层叶子节点包含了所有的索引项。
B+树在查找数据的时候,由于数据都存放在最底层的叶子节点上,所以每次查找都需要检索到叶子节点才能查询到数据。
-- 所以在需要查询数据的情况下每次的磁盘的IO跟树高有直接的关系,但是从另一方面来说,由于数据都被放到了叶子节点,放索引的磁盘块锁存放的索引数量是会跟这增加的,相对于B树来说,B+树的树高理论上情况下是比B树要矮的。
-- 也存在索引覆盖查询的情况,
在索引中数据满足了当前查询语句所需要的全部数据,此时只需要找到索引即可立刻返回,不需要检索到最底层的叶子节点。
2)规则
① B+跟B树不同。
B+树的非叶子节点不保存关键字记录的指针,只进行数据索引,这样使得B+树每个非叶子节点所能保存的关键字大大增加。
② B+树叶子节点保存了父节点的所有关键字记录的指针,所有数据地址必须要到叶子节点才能获取到。所以每次数据查询的次数都一样。
③ B+树叶子节点的关键字从小到大有序排列,左边结尾数据都会保存右边节点开始数据的指针。
④ 非叶子节点的子节点数=关键字数(百度百科。根据各种资料,这里有两种算法的实现方式,另一种为非叶节点的关键字数=子节点数-1(维基百科),虽然数据排列结构不一样,但其原理还是一样的。Mysql 的 B+树是用第一种方式实现)。

3)特点
① B+树的层级更少:
相较于B树B+每个非叶子节点存储的关键字数更多,树的层级更少所以查询数据更快。
② B+树查询速度更稳定:
B+所有关键字数据地址都存在叶子节点上,所以每次查找的次数都相同所以查询速度要比B树更稳定。
③ B+树天然具备排序功能:
B+树所有的叶子节点数据构成了一个有序链表,在查询大小区间的数据时候更方便,数据紧密性很高,缓存的命中率也会比B树高。
④ B+树全节点遍历更快:
B+树遍历整棵树只需要遍历所有的叶子节点即可,而不需要像B树对每一层进行遍历,这有利于数据库做全表扫描。
⑤ B树相对于B+树的优点是,
如果经常访问的数据离根节点很近,而B树的非叶子节点本身存有关键字其数据的地址,所以这种数据检索的时候会要比B+树快。
等值查询:
假如我们查询值等于9的数据。查询路径磁盘块1->磁盘块2->磁盘块6。
① 第一次磁盘IO:将磁盘块1加载到内存中,在内存中从头遍历比较,9<15,走左路,到磁盘寻址磁盘块2。
② 第二次磁盘IO:将磁盘块2加载到内存中,在内存中从头遍历比较,7<9<12,到磁盘中寻址定位到磁盘块6。
③ 第三次磁盘IO:将磁盘块6加载到内存中,在内存中从头遍历比较,在第三个索引中找到9,取出data,如果data存储的行记录,取出data,查询结束。如果存储的是磁盘地址,还需要根据磁盘地址到磁盘中取出数据,查询终止。(这里需要区分的是在InnoDB中Data存储的为行数据,而MyIsam中存储的是磁盘地址。)

范围查询:
假如我们想要查找9和26之间的数据。查找路径是磁盘块1->磁盘块2->磁盘块6->磁盘块7。
① 首先查找值等于9的数据,将值等于9的数据缓存到结果集。这一步和前面等值查询流程一样,发生了三次磁盘IO。
② 查找到15之后,底层的叶子节点是一个有序列表,我们从磁盘块6,键值9开始向后遍历筛选所有符合筛选条件的数据。
③ 第四次磁盘IO:根据磁盘6后继指针到磁盘中寻址定位到磁盘块7,将磁盘7加载到内存中,在内存中从头遍历比较,9<25<26,9<26<=26,将data缓存到结果集。
④ 主键具备唯一性(后面不会有<=26的数据),不需再向后查找,查询终止。将结果集返回给用户。

可以看到B+树可以保证等值和范围查询的快速查找,MySQL的索引就采用了B+树的数据结构。
插入过程:5阶B树的插入
5阶B数的结点最少2个key,最多4个key。
a)空树中插入5

b)依次插入8,10,15

c)插入16

插入16后超过了关键字的个数限制,所以要进行分裂。在叶子结点分裂时,分裂出来的左结点2个记录,右边3个记录,中间key成为索引结点中的key,分裂后当前结点指向了父结点(根结点)。结果如下图所示。

当然我们还有另一种分裂方式,给左结点3个记录,右结点2个记录,此时索引结点中的key就变为15。
d)插入17
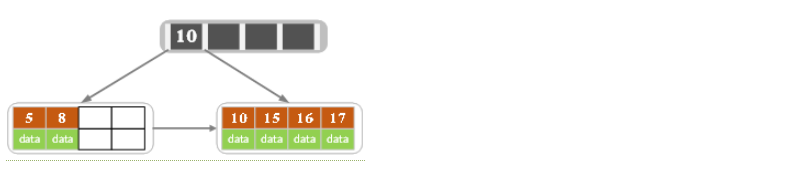
e)插入18,插入后如下图所示

当前结点的关键字个数大于5,进行分裂。分裂成两个结点,左结点2个记录,右结点3个记录,关键字16进位到父结点(索引类型)中,将当前结点的指针指向父结点。
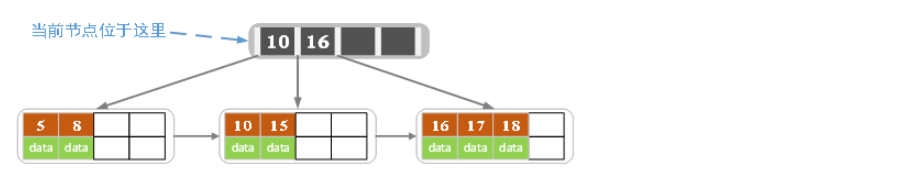
当前结点的关键字个数满足条件,插入结束。
f)插入若干数据后

g)在上图中插入7,结果如下图所示

当前结点的关键字个数超过4,需要分裂。左结点2个记录,右结点3个记录。分裂后关键字7进入到父结点中,将当前结点的指针指向父结点,结果如下图所示。

当前结点的关键字个数超过4,需要继续分裂。左结点2个关键字,右结点2个关键字,关键字16进入到父结点中,将当前结点指向父结点,结果如下图所示。

当前结点的关键字个数满足条件,插入结束。6 B*树
1)规则
B*树是B+树的变种,区别如下:
①首先是关键字个数限制问题,B+树初始化的关键字初始化个数是ceil(m/2),B*树的初始化个数为ceil(2/3*m)。
②B+树节点满时就会分裂,而B*树节点满时会检查兄弟节点是否满(因为每个节点都有指向兄弟的指针),如果兄弟节点未满则向兄弟节点转移关键字,如果兄弟节点已满,则从当前节点和兄弟节点各拿出1/3的数据创建一个新的节点出来。
2)特点
在B+树的基础上因其初始化的容量变大,使得节点空间使用率更高,而又存有兄弟节点的指针,可以向兄弟节点转移关键字的特性使得B*树额分解次数变得更少;
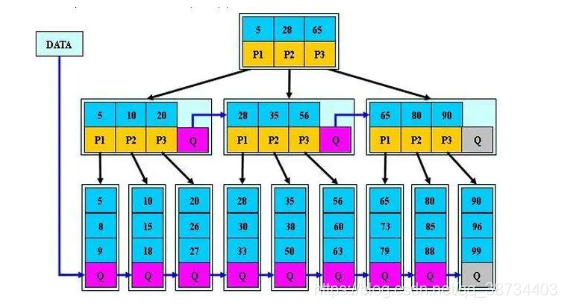
7 总结
1)相同思想和策略
从平衡二叉树、B树、B+树、B*树总体来看它们的贯彻的思想是相同的,都是采用二分法和数据平衡策略来提升查找数据的速度。
2) 不同的方式的磁盘空间利用
不同点是它们一个一个在演变的过程中通过IO从磁盘读取数据的原理进行一步步的演变,每一次演变都是为了让节点的空间更合理的运用起来,从而使树的层级减少达到快速查找数据的目的。
为什么使用索引/b+
- MSBing
- 1 加快数据访问
--加快数据访问,可以从减少IO考虑:两个维度:读取次数少,读取量少
--数据格式:kv格式数据->使用数据结构:hash表/树
--数据在进行读取的时候要分块读取 - 2 操作系统核心概念
1)局部性原理:
空间局部性:数据和程序都有聚集成群的倾向;
时间局部性:之前被访问富哦的数据,有可能很快被下一次访问到;
2)磁盘预读:
内存跟磁盘发生交互的时候,有一个基本的逻辑单位叫做页,页的大小和操作系统相关,一般是4k或者8k,我们在进行数据交互的时候可以是页的整数倍。
innodb存储引擎每次读取数据读16k 3 数据存储的选择
1)hash

--hash存储的问题:
① 需要优良的hash算法解决哈希碰撞、哈希冲突
② 无序,无法进行范围查询:在大表扫描时,效率低
③ 需要大量的内存空间:如扩容等
--但hash仍有使用:
Memory存储引擎支持hash索引,innodb支持自适应hash。
2)b+树

1> 二叉树
二叉问题:树结构过深,则IO次数变多
优点:有序
2> b树
多阶,b树缺点:无重复数据

3> 存储
--存储比较:
(16k 1000=1024换字节,一层的存储量16000byte)
b树:假设data为1k,三层数据量 16x16x16=4096
b+树:假设占用kv10个字节 16x1000/10=1600,三层:1600x1600x16=40960000

4> b+树
--b+树是在b树的基础之前做的一种优化,变化如下:
① b+树每个节点可以包含更多的节点,这个做的原因有两个,第一个原因是为了降低树的高度,第二个原因是将数据范围变为多个区间,区间越多,数据检索越快。
② 非叶子节点存储key,叶子节点存储key和数据
③ 叶子节点两两指针互相连接(符合磁盘预读特性),顺序查询性能更高
--b+:重复数据->叶子包含全部数据->非叶子不存数据
--数据存储量:假设占用kv10个字节 16x1000/10=1600
--问:索引一般几层?:标准回答 3-4层足以支撑千万级数据量
块大小不变 key值变化
int 4字节
varchar 一般超过4或10

-- 叶子节点有序
int id自增 ?为什么?防止页分裂
页合并-麻烦

--索引的维护
大量插入 性能变低Hash索引和B+树有什么区别或者说优劣呢? √
首先要知道Hash索引和B+树索引的底层实现原理:
-- hash索引底层就是hash表,进行查找时,调用一次hash函数就可以获取到相应的键值,之后进行回表查询获得实际数据。B+树底层实现是多路平衡查找树。对于每一次的查询都是从根节点出发,查找到叶子节点方可以获得所查键值,然后根据查询判断是否需要回表查询数据。
-- Hash表,在Java中的HashMap,TreeMap就是Hash表结构,以键值对的方式存储数据。我们使用Hash表存储表数据Key可以存储索引列,Value可以存储行记录或者行磁盘地址。Hash表在等值查询时效率很高,时间复杂度为O(1);但是不支持范围快速查找,范围查找时还是只能通过扫描全表方式。
显然这种并不适合作为经常需要查找和范围查找的数据库索引使用。- 那么可以看出他们有以下的不同:
① hash索引进行等值查询更快(一般情况下),但是却无法进行范围查询。
因为在hash索引中经过hash函数建立索引之后,索引的顺序与原顺序无法保持一致,不能支持范围查询。而B+树的的所有节点皆遵循(左节点小于父节点,右节点大于父节点,多叉树也类似),天然支持范围。
② hash索引不支持使用索引进行排序,原理同上。
hash索引不支持模糊查询以及多列索引的最左前缀匹配。原理也是因为hash函数的不可预测。AAAA和AAAAB的索引没有相关性。
③ hash索引任何时候都避免不了回表查询数据,而B+树在符合某些条件(聚簇索引,覆盖索引等)的时候可以只通过索引完成查询。
④ hash索引虽然在等值查询上较快,但是不稳定。性能不可预测,当某个键值存在大量重复的时候,发生hash碰撞,此时效率可能极差。而B+树的查询效率比较稳定,对于所有的查询都是从根节点到叶子节点,且树的高度较低。
-- 因此,在大多数情况下,直接选择B+树索引可以获得稳定且较好的查询速度。而不需要使用hash索引。
索引_explain
- mashibing:注意官网的学习,而不是百度
- 1 使用
explain关键字:如果在select语句前放上关键词explain,mysql将解释它如何处理select,提供有关表如何联接和联接的次序。 - 2 主要关键字 type key
参数可查看官网:

--id:sql执行顺序
--type:all、index,rang
--key:sql执行的索引列
--extra:额外信息,using index
如,
using filesort:利用临时文件进行排序
-> show index from rental; 查看rental表中索引 
- |关键字|功能|
|:--|:--|
|select_type|常用的有 SIMPLE 简单查询,UNION 联合查询,SUBQUERY 子查询等。|
|table|要查询的表
|possible_keys|可选择的索引
|key|实际使用的索引
|rows|扫描的行数
|type|索引查询类型,经常用到的索引查询类型:const:使用主键或者唯一索引进行查询的时候只有一行匹配 ref:使用非唯一索引 range:使用主键、单个字段的辅助索引、多个字段的辅助索引的最后一个字段进行范围查询 index:和all的区别是扫描的是索引树 all:扫描全表;|
索引_分类
- MyISAM索引和InnoDB索引?
- Mysql的索引实现
介绍完了索引数据结构,那肯定是要带入到Mysql里面看看真实的使用场景的,所以这里分析Mysql的两种存储引擎的索引实现:MyISAM索引和InnoDB索引 - MyIsam索引
-- 以一个简单的user表为例。user表存在两个索引,id列为主键索引,age列为普通索引
-- MyISAM的数据文件和索引文件是分开存储的。MyISAM使用B+树构建索引树时,叶子节点中存储的键值为索引列的值,数据为索引所在行的磁盘地址。

1)主键索引
注:以下分析仅供参考,MyISAM在查询时,会将索引节点缓存在MySQL缓存中,而数据缓存依赖于操作系统自身的缓存,所以并不是每次都是走的磁盘,这里只是为了分析索引的使用过程。

◆ 表user的索引存储在索引文件user.MYI中,数据文件存储在数据文件 user.MYD中。
◆ 简单分析下查询时的磁盘IO情况:根据主键等值查询数据:
select * from user where id = 28;
① 先在主键树中从根节点开始检索,将根节点加载到内存,比较28<75,走左路。(1次磁盘IO)
② 将左子树节点加载到内存中,比较16<28<47,向下检索。(1次磁盘IO)
③ 检索到叶节点,将节点加载到内存中遍历,比较16<28,18<28,28=28。查找到值等于30的索引项。(1次磁盘IO)
④ 从索引项中获取磁盘地址,然后到数据文件user.MYD中获取对应整行记录。(1次磁盘IO)
⑤ 将记录返给客户端。
◆ 磁盘IO次数:3次索引检索+记录数据检索。

◆ 根据主键范围查询数据:
select * from user where id between 28 and 47;
① 先在主键树中从根节点开始检索,将根节点加载到内存,比较28<75,走左路。(1次磁盘IO)
② 将左子树节点加载到内存中,比较16<28<47,向下检索。(1次磁盘IO)
③ 检索到叶节点,将节点加载到内存中遍历比较16<28,18<28,28=28<47。查找到值等于28的索引项。
根据磁盘地址从数据文件中获取行记录缓存到结果集中。(1次磁盘IO)
我们的查询语句时范围查找,需要向后遍历底层叶子链表,直至到达最后一个不满足筛选条件。
④ 向后遍历底层叶子链表,将下一个节点加载到内存中,遍历比较,28<47=47,根据磁盘地址从数据文件中获取行记录缓存到结果集中。(1次磁盘IO)
⑤ 最后得到两条符合筛选条件,将查询结果集返给客户端。
◆ 磁盘IO次数:4次索引检索+记录数据检索。

2)辅助索引
◆ 在 MyISAM 中,辅助索引和主键索引的结构是一样的,没有任何区别,叶子节点的数据存储的都是行记录的磁盘地址。只是主键索引的键值是唯一的,而辅助索引的键值可以重复。
◆ 查询数据时,由于辅助索引的键值不唯一,可能存在多个拥有相同的记录,所以即使是等值查询,也需要按照范围查询的方式在辅助索引树中检索数据。 - InnoDB索引
1)主键索引(聚簇索引)
◆ 每个InnoDB表都有一个聚簇索引,聚簇索引使用B+树构建,叶子节点存储的数据是整行记录。一般情况下,聚簇索引等同于主键索引,当一个表没有创建主键索引时,InnoDB会自动创建一个ROWID字段来构建聚簇索引。InnoDB创建索引的具体规则如下:
① 在表上定义主键PRIMARY KEY,InnoDB将主键索引用作聚簇索引。
② 如果表没有定义主键,InnoDB会选择第一个不为NULL的唯一索引列用作聚簇索引。
③ 如果以上两个都没有,InnoDB 会使用一个6 字节长整型的隐式字段 ROWID字段构建聚簇索引。该ROWID字段会在插入新行时自动递增。
◆ 除聚簇索引之外的所有索引都称为辅助索引。在中InnoDB,辅助索引中的叶子节点存储的数据是该行的主键值都。在检索时,InnoDB使用此主键值在聚簇索引中搜索行记录。
◆ 这里以user_innodb为例,user_innodb的id列为主键,age列为普通索引。

◆ InnoDB的数据和索引存储在一个文件t_user_innodb.ibd中。InnoDB的数据组织方式,是聚簇索引。
◆ 主键索引的叶子节点会存储数据行,辅助索引只会存储主键值。
InnoDB主键索引,如图:

◆ 等值查询数据:
** select * from user_innodb where id = 28;**
① 先在主键树中从根节点开始检索,将根节点加载到内存,比较28<75,走左路。(1次磁盘IO)
② 将左子树节点加载到内存中,比较16<28<47,向下检索。(1次磁盘IO)
③ 检索到叶节点,将节点加载到内存中遍历,比较16<28,18<28,28=28。查找到值等于28的索引项,直接可以获取整行数据。将改记录返回给客户端。(1次磁盘IO)
◆ 磁盘IO数量:3次。

2)辅助索引
◆ 除聚簇索引之外的所有索引都称为辅助索引,InnoDB的辅助索引只会存储主键值而非磁盘地址。
◆ 以表user_innodb的age列为例,age索引的索引结果如下图(InnoDB辅助索引)。
◆ 底层叶子节点的按照(age,id)的顺序排序,先按照age列从小到大排序,age列相同时按照id列从小到大排序。
◆ 使用辅助索引需要检索两遍索引:首先检索辅助索引获得主键,然后使用主键到主索引中检索获得记录。

◆ 画图分析等值查询的情况:
** select * from t_user_innodb where age=19; **
◆ 根据在辅助索引树中获取的主键id,到主键索引树检索数据的过程称为回表查询。
◆ 磁盘IO数:辅助索引3次+获取记录回表3次

3)组合索引
◆ 还是以自己创建的一个表为例:表 abc_innodb,id为主键索引,创建了一个联合索引idx_abc(a,b,c)。

◆ 组合索引的数据结构:

◆ 组合索引的查询过程:
select * from abc_innodb where a = 13 and b = 16 and c = 4;

4)最左匹配原则:
◆ 最左前缀匹配原则和联合索引的索引存储结构和检索方式是有关系的。
◆ 在组合索引树中,最底层的叶子节点按照第一列a列从左到右递增排列,但是b列和c列是无序的,b列只有在a列值相等的情况下小范围内递增有序,而c列只能在a,b两列相等的情况下小范围内递增有序。
◆ 就像上面的查询,B+树会先比较a列来确定下一步应该搜索的方向,往左还是往右。如果a列相同再比较b列。但是如果查询条件没有a列,B+树就不知道第一步应该从哪个节点查起。
◆ 可以说创建的idx_abc(a,b,c)索引,相当于创建了(a)、(a,b)(a,b,c)三个索引。◆ 组合索引的最左前缀匹配原则:使用组合索引查询时,mysql会一直向右匹配直至遇到范围查询(>、<、between、like)就停止匹配。
5)覆盖索引
◆ 覆盖索引并不是说是索引结构,覆盖索引是一种很常用的优化手段。因为在使用辅助索引的时候,我们只可以拿到主键值,相当于获取数据还需要再根据主键查询主键索引再获取到数据。但是试想下这么一种情况,在上面abc_innodb表中的组合索引查询时,如果我只需要abc字段的,那是不是意味着我们查询到组合索引的叶子节点就可以直接返回了,而不需要回表。这种情况就是覆盖索引。
可以看一下执行计划:
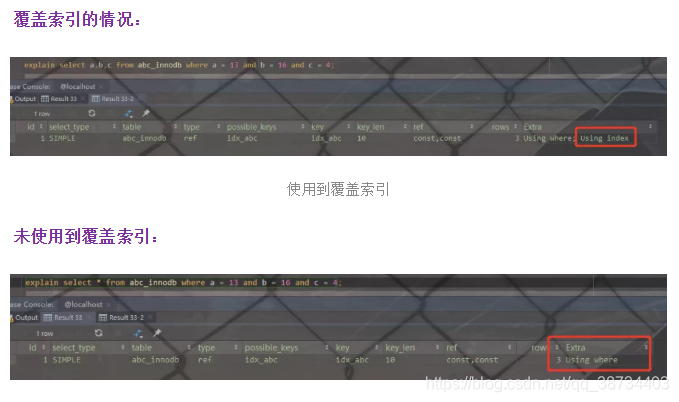
- 总结:对sql语句里面的索引的优化
1)避免回表
◆ 在InnoDB的存储引擎中,使用辅助索引查询的时候,因为辅助索引叶子节点保存的数据不是当前记录的数据而是当前记录的主键索引,索引如果需要获取当前记录完整数据就必然需要根据主键值从主键索引继续查询。这个过程我们成位回表。想想回表必然是会消耗性能影响性能。那如何避免呢?
◆ 使用索引覆盖,举个例子:现有User表(id(PK),name(key),sex,address,hobby...)
◆ 如果在一个场景下,select id,name,sex from user where name ='zhangsan';这个语句在业务上频繁使用到,而user表的其他字段使用频率远低于它,在这种情况下,如果我们在建立 name 字段的索引的时候,不是使用单一索引,而是使用联合索引(name,sex)这样的话再执行这个查询语句是不是根据辅助索引查询到的结果就可以获取当前语句的完整数据。
◆ 这样就可以有效地避免了回表再获取sex的数据。
◆ 这里就是一个典型的使用覆盖索引的优化策略减少回表的情况。
2)联合索引的使用
◆ 联合索引,在建立索引的时候,尽量在多个单列索引上判断下是否可以使用联合索引。联合索引的使用不仅可以节省空间,还可以更容易的使用到索引覆盖。
◆ 试想一下,索引的字段越多,是不是更容易满足查询需要返回的数据呢。比如联合索引(a_b_c),是不是等于有了索引:a,a_b,a_b_c三个索引,这样是不是节省了空间,当然节省的空间并不是三倍于(a,a_b,a_b_c)三个索引,因为索引树的数据没变,但是索引data字段的数据确实真实的节省了。
◆ 联合索引的创建原则,在创建联合索引的时候因该把频繁使用的列、区分度高的列放在前面,频繁使用代表索引利用率高,区分度高代表筛选粒度大,这些都是在索引创建的需要考虑到的优化场景,也可以在常需要作为查询返回的字段上增加到联合索引中,如果在联合索引上增加一个字段而使用到了覆盖索引,那我建议这种情况下使用联合索引。
◆ 联合索引的使用
① 考虑当前是否已经存在多个可以合并的单列索引,如果有,那么将当前多个单列索引创建为一个联合索引。
② 当前索引存在频繁使用作为返回字段的列,这个时候就可以考虑当前列是否可以加入到当前已经存在索引上,使其查询语句可以使用到覆盖索引。
- Mysql的索引实现
哪些需要创建索引
- 创建索引的原则(重中之重):索引虽好,但也不是无限制的使用,最好符合一下几个原则
1) 最左前缀匹配原则,组合索引非常重要的原则,mysql会一直向右匹配直到遇到范围查询(>、<、between、like)就停止匹配,比如a = 1 and b = 2 and c > 3 and d = 4 如果建立(a,b,c,d)顺序的索引,d是用不到索引的,如果建立(a,b,d,c)的索引则都可以用到,a,b,d的顺序可以任意调整。
2)较频繁作为查询条件的字段才去创建索引
3)更新频繁字段不适合创建索引
4)若是不能有效区分数据的列不适合做索引列(如性别,男女未知,最多也就三种,区分度实在太低)
5)尽量的扩展索引,不要新建索引。比如表中已经有a的索引,现在要加(a,b)的索引,那么只需要修改原来的索引即可。
6)定义有外键的数据列一定要建立索引。
7)对于那些查询中很少涉及的列,重复值比较多的列不要建立索引。
8)对于定义为text、image和bit的数据类型的列不要建立索引。
生产:如何设计索引
你都是如何设计索引的?
https://mp.weixin.qq.com/s/-gmAPfiKMNJgHhIZqR2C4A|用对了这些场景下的索引
• InnoDB 存储引擎有一个特殊的功能叫“自适应哈希索引”,当某个索引值被使用的非常频繁时,会在 B+Tree 索引之上再创建一个哈希索引,这样就让 B+Tree 索引具有哈希索引的一些优点,比如快速的哈希查找。
索引使用场景(重点)[-]
- 1)where
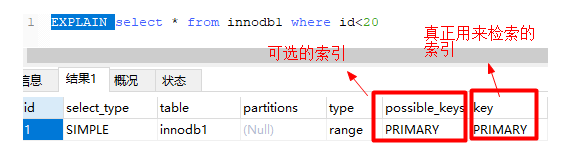
上图中,根据id查询记录,因为id字段仅建立了主键索引,因此此SQL执行可选的索引只有主键索引,如果有多个,最终会选一个较优的作为检索的依据。
-- 增加一个没有建立索引的字段-- (alter table 表名 add index(字段名))alter table innodb1 add sex char(1);-- 按sex检索时可选的索引为nullEXPLAIN SELECT * from innodb1 where sex='男';
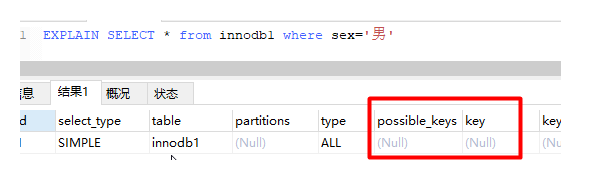
- 2) order by
-- 当我们使用order by将查询结果按照某个字段排序时,如果该字段没有建立索引,那么执行计划会将查询出的所有数据使用外部排序(将数据从硬盘分批读取到内存使用内部排序,最后合并排序结果),这个操作是很影响性能的,因为需要将查询涉及到的所有数据从磁盘中读到内存(如果单条数据过大或者数据量过多都会降低效率),更无论读到内存之后的排序了。
-- 但是如果我们对该字段建立索引alter table 表名 add index(字段名),那么由于索引本身是有序的,因此直接按照索引的顺序和映射关系逐条取出数据即可。而且如果分页的,那么只用取出索引表某个范围内的索引对应的数据,而不用像上述那取出所有数据进行排序再返回某个范围内的数据。(从磁盘取数据是最影响性能的) - 3) join
对join语句匹配关系(on)涉及的字段建立索引能够提高效率 - 4) 索引覆盖
如果要查询的字段都建立过索引,那么引擎会直接在索引表中查询而不会访问原始数据(否则只要有一个字段没有建立索引就会做全表扫描),这叫索引覆盖。因此我们需要尽可能的在select后只写必要的查询字段,以增加索引覆盖的几率。 - 这里值得注意的是不要想着为每个字段建立索引,因为优先使用索引的优势就在于其体积小。
- 1)where
索引失效
- 《Java性能调优实战-34》
- 情况1:
Hash索引实现的列,如果使用到范围查询,那么该索引将无法被优化器使用到。也就是说 Memory 引擎实现的Hash索引只有在“=”的查询条件下,索引才会生效。
例子:
order 表设置为 Memory 存储引擎,分析查询条件为 id<10 的 SQL,可以发现没有使用到索引。

- 情况2:
如果是以 % 开头的 LIKE 查询将无法利用节点查询数据:
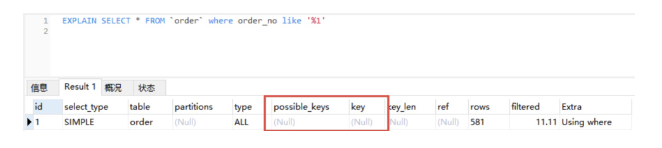
- 情况3:
最左匹配原则:需要使用索引中的最左边的列进行查询,才能使用到联合索引。 - 情况4:
如果查询条件中使用 or,且 or 的前后条件中有一个列没有索引,那么涉及的索引都不会被使用到。

索引为什么用在很多值重复的字段上会失效
是优化器的选择,如果比例太高,mysql会认为这种方式很低效,因为涉及到回表,所以默认全表扫描使用索引查询一定能提高查询的性能吗?为什么 [-]
- 通常,通过索引查询数据比全表扫描要快。但是我们也必须注意到它的代价。
• 索引需要空间来存储,也需要定期维护, 每当有记录在表中增减或索引列被修改时,索引本身也会被修改。 这意味着每条记录的INSERT,DELETE,UPDATE将为此多付出4,5 次的磁盘I/O。 因为索引需要额外的存储空间和处理,那些不必要的索引反而会使查询反应时间变慢。使用索引查询不一定能提高查询性能,索引范围查询(INDEX RANGE SCAN)适用于两种情况:
• 基于一个范围的检索,一般查询返回结果集小于表中记录数的30%
• 基于非唯一性索引的检索
- 通常,通过索引查询数据比全表扫描要快。但是我们也必须注意到它的代价。
mysql调优
- 如何回答:表达方式
大部分可以如下:


字符串截取 取789没有变化 如取7 索引存储小





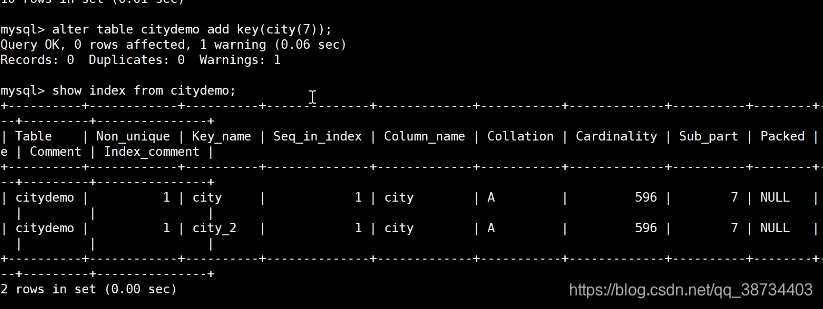
主从复制
- 主从复制原理和实践_ab|《实战45-24》|
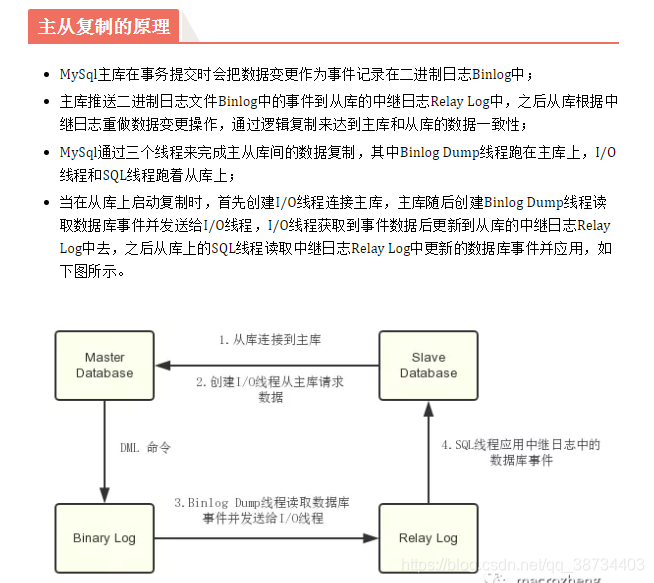
- 1 主备一致
- 1.1 基本原理
- 1)主备切换流程
① 状态 1 中,客户端的读写都直接访问节点 A,而节点 B 是 A 的备库,只是将 A 的更新都同步过来,到本地执行。这样可以保持节点 B 和 A 的数据是相同的。
② 当需要切换的时候,就切成状态 2。
这时候客户端读写访问的都是节点 B,而节点 A 是 B的备库。

--为什么状态 1 中,虽然B没有被直接访问,但依然把节点 B(也就是备库)设置成只读(readonly)模式(建议如此设置)?
- 有时候一些运营类的查询语句会被放到备库上去查,设置为只读可以防止误操作;
- 防止切换逻辑有 bug,比如切换过程中出现双写,造成主备不一致;
- 可以用 readonly 状态,来判断节点的角色。
- 2)eg.update语句完整主备流程
--主库A接收到客户端的更新请求后,执行内部事务的更新逻辑,同时写 binlog。(Binlog Dump线程跑在主库上执行)
--备库 B 跟主库 A 之间维持了一个长连接。主库 A 内部有一个线程,专门用于服务备库 B的这个长连接。一个事务日志同步的完整过程是这样的:
1> 在备库 B 上通过 change master 命令,设置主库 A 的 IP、端口、用户名、密码,以及要从哪个位置开始请求 binlog,这个位置包含文件名和日志偏移量。2> 在备库 B 上执行 start slave 命令,这时候备库会启动两个线程,就是图中的 io_thread和 sql_thread。其中 io_thread 负责与主库建立连接。
3> 主库 A 校验完用户名、密码后,开始按照备库 B 传过来的位置,从本地读取 binlog,发给 B。
4> 备库 B 拿到 binlog 后,写到本地文件,称为中继日志(relay log)。
5> sql_thread 读取中继日志,解析出日志里的命令,并执行
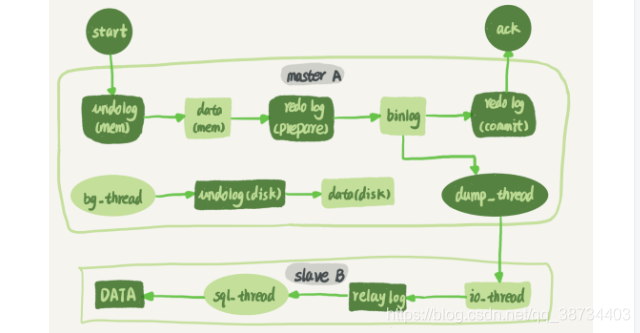
- 3)binlog的3种格式
--格式:
① statement:
每一条会修改数据的sql都会记录在binlog中
② row:
不记录sql语句上下文相关信息,仅保存哪条记录被修改
③ mixed:
前两种的混合使用
--Mysql默认是使用Statement日志格式,推荐使用MIXED.
① 使用binlog_format=statement
binlog 里面记录的就是 SQL 语句的原文;
查看:show binlog events in 'master.000001';
显示信息中包含要执行的语句;
-问题:
(例子:delete 带 limit,索引找到第一个满足条件的返回)
statement 格式下,记录到 binlog 里的是语句原文,因此可能会出现这样一种情况:在主库执行这条 SQL 语句的时候,用的是索引 a;而在备库执行这条 SQL 语句的时候,却使用了索引 t_modified。会出现主备数据不一致的情况。
②使用row
使用 row 格式的时候,binlog 里面记录了真实删除行的主键 id,这样 binlog 传到备库去的时候,就肯定会删除 id=4 的行,不会有主备删除不同行的问题。
---缺点:
如,delete10 万行数据,statement在binlog记录一个 SQL 语句,占用几十个字节的空间。row要把10 万条记录都写到 binlog 中。不仅会占用更大的空间,同时写 binlog 也要耗费 IO 资源,影响执行速度。
③ 使用mixed
---引入:基于前2种的缺点,MySQL就取了个折中方案,也就是有了 mixed 格式的 binlog。
---概念:mixed 格式:MySQL 自己会判断这条 SQL 语句是否可能引起主备不一致,如果有可能,就用row 格式,否则就用 statement 格式。
---例子:delete limit,设置为 mixed 后,就会记录为 row 格式;而如果执行的语句去掉limit 1,就会记录为 statement 格式;
---建议线上使用mixed - 4)恢复数据
--越来越多的场景要求把 MySQL 的 binlog 格式设置成 row:
--恢复数据,delete、insert 和 update 这三种 SQL 语句的角度看一下使用row格式的优点:
① delete:
binlog 也会把被删掉的行的整行信息保存起来。执行完一条 delete 语句后,发现删错数据了,可以直接把 binlog 中记录的 delete 语句转成 insert,把被错删的数据插入回去就可以恢复了。
②insert
insert 语句的 binlog 里会记录所有的字段信息,这些信息可以用来精确定位刚刚被插入的那一行。这时,你直接把insert 语句转成 delete 语句,删除掉这被误插入的一行数据就可以了。
③ update
update 语句,binlog 里面会记录修改前整行的数据和修改后的整行数据。所以,如果你误执行了 update 语句的话,只需要把这个 event 前后的两行信息对调一下,再去数据库里面执行,就能恢复这个更新操作了 - 5)循环复制问题:双M结构
--实际生产上使用比较多的是双 M结构,即下图主备切换流程。
--区别:
是多了一条线,即:节点 A 和 B 之间总是互为主备关系。这样在切换的时候就不用再修改主备关系。
--问题:
业务逻辑在节点 A 上更新了一条语句,然后再把生成的 binlog 发给节点 B,节点 B 执行完这条更新语句后也会生成 binlog。(我建议你把参数 log_slave_updates 设置为 on,表示备库执行 relay log 后生成 binlog)。
那么,如果节点 A 同时是节点 B 的备库,相当于又把节点 B 新生成的 binlog 拿过来执行了一次,然后节点 A 和 B 间,会不断地循环执行这个更新语句,也就是循环复制了。
--解决:MySQL 在 binlog 中记录了这个命令第一次执行时所在实例的server id。因此,我们可以用下面的逻辑,来解决两个节点间的循环复制的问题:
1)规定两个库的 server id 必须不同,如果相同,则它们之间不能设定为主备关系;
2)一个备库接到 binlog 并在重放的过程中,生成与原 binlog 的 server id 相同的新的binlog;
3)每个库在收到从自己的主库发过来的日志后,先判断 server id,如果跟自己的相同,表示这个日志是自己生成的,就直接丢弃这个日志。
--按照这个逻辑,如果我们设置了双 M 结构,日志的执行流就会变成这样:
1)从节点 A 更新的事务,binlog 里面记的都是 A 的 server id;
2)传到节点 B 执行一次以后,节点 B 生成的 binlog 的 server id 也是 A 的 server id;
3)再传回给节点 A,A 判断到这个 server id 与自己的相同,就不会再处理这个日志。所以,死循环在这里就断掉了。
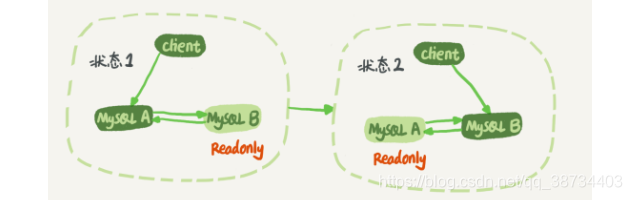
- 2 保证高可用
- 2.1 主备延迟
- 主备切换可能是一个主动运维动作,比如软件升级、主库所在机器按计划下线等,也可能是被动操作,比如主库所在机器掉电。
- 1)主备延迟概念
--三个时间点
1)主库 A 执行完成一个事务,写入 binlog,把这个时刻记为 T1;
2)之后传给备库 B,把备库 B 接收完这个 binlog 的时刻记为 T2;
3)备库 B 执行完成这个事务,把这个时刻记为 T3
--主备延迟:
指同一个事务,在备库执行完成的时间和主库执行完成的时间之间的差值,也就是 T3-T1。
---查看:备库上执行 show slave status 命令:
返回结果中seconds_behind_master,用于表示当前备库延迟了多少秒。来作为主备延迟的值,这个值的时间精度是秒;
---seconds_behind_master 的计算方法:同T3-T1
①每个事务的 binlog 里面都有一个时间字段,用于记录主库上写入的时间;
②备库取出当前正在执行的事务的时间字段的值,计算它与当前系统时间的差值,得到seconds_behind_master。 - 2)主备延迟值准确性
①主备库机器的系统时间设置不一致
备库连接到主库的时候,会通过执行 SELECT UNIX_TIMESTAMP() 函数来获得当前主库的系统时间。如果发现主库的系统时间与自己不一致,备库在执行seconds_behind_master 计算的时候会自动扣掉这个差值。
② 日志从主库传给备库所需的时间
网络正常的时候,日志从主库传给备库所需的时间是很短的,即 T2-T1的值是非常小的。
③ 直接表现
网络正常情况下,主备延迟的主要来源是备库接收完 binlog和执行完这个事务之间的时间差。
主备延迟最直接的表现是,备库消费中转日志(relay log)的速度,比主库生产binlog 的速度要慢 - 2.2 主备延迟的来源
- 1)首先,有些部署条件下,备库所在机器的性能要比主库所在的机器性能差。
--更新请求对 IOPS 的压力,在主库和备库上是无差别的。这种部署时,一般都会将备库设置为“非双 1”的模式。实际上,更新过程中也会触发大量的读操作。所以,当备库主机上的多个备库都在争抢资源的时候,就可能会导致主备延迟了;
--解决:
这种部署现在比较少了。因为主备可能发生切换,备库随时可能变成主库,所以主备库选用相同规格的机器,并且做对称部署,是现在比较常见的情况 - 2)第二种常见的可能,备库的压力大。
--采用对称部署下:
--问题:
主库提供了写能力,在备库配置了一些读能力;
由于主库直接影响业务,使用会比较克制,反而忽视了备库的压力控制。结果就是,备库上的查询耗费了大量的 CPU 资源,影响了同步速度,造成主备延迟。
--解决:
1>一主多从。除了备库外,可以多接几个从库,让这些从库来分担读的压力。(多被采用)
2> 通过 binlog 输出到外部系统,比如 Hadoop 这类系统,让外部系统提供统计类查询的能力。 - 3)第三种可能,大事务
--一主多从下:
--问题:
因为主库上必须等事务执行完成才会写入 binlog,再传给备库。所以,如果一个主库上的语句执行 10 分钟,那这个事务很可能就会导致从库延迟 10分钟。
--场景:
DBA说:不要一次性地用 delete 语句删除太多数据。其实,这就是一个典型的大事务场景。
--解决:
控制每个事务删除的数据量,分成多次删除。 - 4)另一种典型的大事务场景,大表 DDL
--解决:
计划内的 DDL,建议使用 gh-ost 方案《实战13》 - 2.3 主备切换时主备延迟的策略
- 1)可靠性优先策略 -双M切换流程
--状态 1 到2 切换的详细过程(一般是由专门的 HA 系统来完成的,暂称之为可靠性优先流程):
1> 判断备库 B 现在的 seconds_behind_master,如果小于某个值(比如 5 秒)继续下一步,否则持续重试这一步;
2> 把主库 A 改成只读状态,即把 readonly 设置为 true;
3> 判断备库 B 的 seconds_behind_master 的值,直到这个值变成 0 为止;
4> 把备库 B 改成可读写状态,也就是把 readonly 设置为 false;
5> 把业务请求切到备库 B。
--问题:存在不可用时间
步骤 2 之后,主库 A 和备库 B 都处于 readonly 状态,也就是说这时系统处于不可写状态,直到步骤 5 完成后才能恢复。
--为什么在步骤1判断SBM?
不可用状态中,比较耗费时间的是步骤 3,可能需要耗费好几秒的时间。在步骤 1 先做判断,确保 seconds_behind_master 的值足够小。如果一开始主备延迟就长达 30 分钟,系统的不可用时间就会长达 30 分钟,一般业务都是不可接受的。
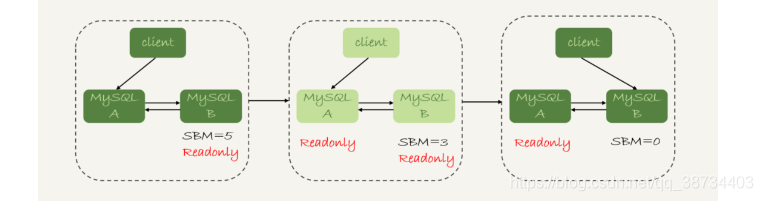
2)可用性优先策略
--流程:
强行把步骤 4、5 调整到最开始执行,即不等主备数据同步,直接把连接切到备库 B,并且让备库 B 可以读写,那么系统这个不可用时间几乎降为 0。
--问题:
能出现数据不一致的情况。
--建表:
create table t('id','c'...
增主键 id,初始化,主库和备库上都是 3 行数据
insert into t(c) values(1),(2),(3);
//rd执行:
insert into t(c) values(4);
insert into t(c) values(5);
现在主库上其他的数据表有大量的更新,导致主备延迟达到 5 秒。在插入一条 c=4的语句后,发起了主备切换。
--情况1:
可用性优先策略,且 binlog_format=mixed时的切换流程和数据结果:
1步骤 2 中,主库 A 执行完 insert 语句,插入了一行数据(4,4),之后开始进行主备切换。
2步骤 3 中,由于主备之间有 5 秒的延迟,所以备库 B 还没来得及应用“插入 c=4”这个中转日志,就开始接收客户端“插入 c=5”的命令。
3步骤 4 中,备库 B 插入了一行数据(4,5),并且把这个 binlog 发给主库 A。
4步骤 5 中,备库 B 执行“插入 c=4”这个中转日志,插入了一行数据(5,4)。而直接在备库 B 执行的“插入 c=5”这个语句,传到主库 A,就插入了一行新数据(5,5)。

--情况2:
可用性优先策略,但设置 binlog_format=row
---row 格式在记录 binlog 的时候,会记录新插入的行的所有字段值,所以最后只会有一行不一致。而且,两边的主备同步的应用线程会报错 duplicate key error 并停止。也就是说,这种情况下,备库 B 的 (5,4) 和主库 A 的 (5,5) 这两行数据,都不会被对方执行。

--结论:
1> 使用 row 格式的 binlog 时,数据不一致的问题更容易被发现。而使用 mixed 或者statement 格式的 binlog 时,数据很可能悄悄地就不一致了。
2>主备切换的可用性优先策略会导致数据不一致。因此,大多数情况下,建议使用可靠性优先策略。3 小时级备库延时
- 《实战45-26》
- 3.1 备库延时
--原因:
备库执行日志的速度持续低于主库生成日志的速度,而且对于一个压力持续比较高的主库来说,备库很可能永远都追不上主库的节奏。
--解决:
备库并行复制
--详细:
---主备的并行复制能力,关注的是图中黑色的两个箭头。(注:用箭头的粗细来代表并行度的真实情况如图。)
箭头1:代表了客户端写入主库,并发度影响--各种锁;
箭头2:代表的是备库上 sql_thread 执行中转日志(relay log)--并发:图中备库上 sql_thread 更新数据 (DATA) 的逻辑。如果是用单线程的话,就会导致备库应用日志不够快,造成主备延迟。
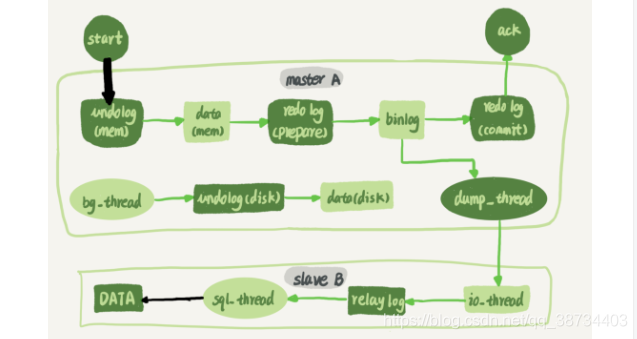
- 2)解决
--单线程->多线程
--原理:所有的多线程复制机制,都是要把只有一个线程的 sql_thread,拆成多个线程,符合如下模型:
---coordinator: 就是原来的 sql_thread, 不再直接更新数据,而只负责读取中转日志和分发事务。
---worker 线程:真正更新日志的。而 work 线程的个数,就是由参数 slave_parallel_workers 决定的。经验,把这个值设置为 8~16 之间最好(32 核物理机的情况),备库还有可能要提供读查询,不能把 CPU 都吃光了
--coordinator的分发:
coordinator 在分发的时候,需要满足以下这两个基本要求:
1>不能造成更新覆盖。这就要求更新同一行的两个事务,必须被分发到同一个 worker中。
2>同一个事务不能被拆开,必须放到同一个 worker 中。
各个版本的多线程复制,都遵循了这两条基本原则。
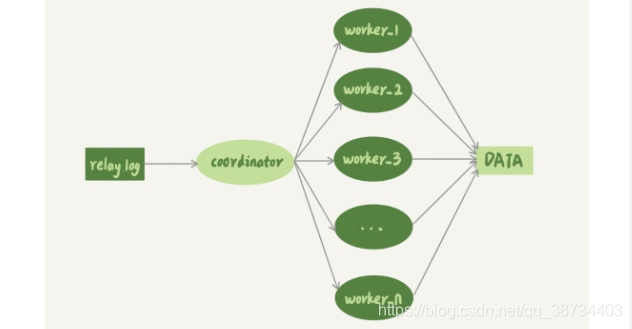
- 2)版本迭代
- 5.6 版本之前,MySQL 只支持单线程复制;
待补充.......
- 主从复制
- 主从复制:将主数据库中的DDL和DML操作通过二进制日志(BINLOG)传输到从数据库上,然后将这些日志重新执行(重做);从而使得从数据库的数据与主数据库保持一致。
- 主从复制的作用
◆ 主数据库出现问题,可以切换到从数据库。
◆ 可以进行数据库层面的读写分离。
◆ 可以在从数据库上进行日常备份。 - MySQL主从复制解决的问题
◆ 数据分布:随意开始或停止复制,并在不同地理位置分布数据备份
◆ 负载均衡:降低单个服务器的压力
◆ 高可用和故障切换:帮助应用程序避免单点失败
◆ 升级测试:可以用更高版本的MySQL作为从库 - MySQL主从复制工作原理
◆ 在主库上把数据更高记录到二进制日志
◆ 从库将主库的日志复制到自己的中继日志
◆ 从库读取中继日志的事件,将其重放到从库数据中 - 主要涉及三个线程:binlog 线程、I/O 线程和 SQL 线程。
◆ 主--binlog 线程 :负责将主服务器上的数据更改写入二进制日志(Binary log)中。
◆ 从--I/O 线程 :负责从主服务器上读取- 二进制日志,并写入从服务器的中继日志(Relay log)。
◆ 从--SQL 线程 :负责读取中继日志,解析出主服务器已经执行的数据更改并在从服务器中重放(Replay)。
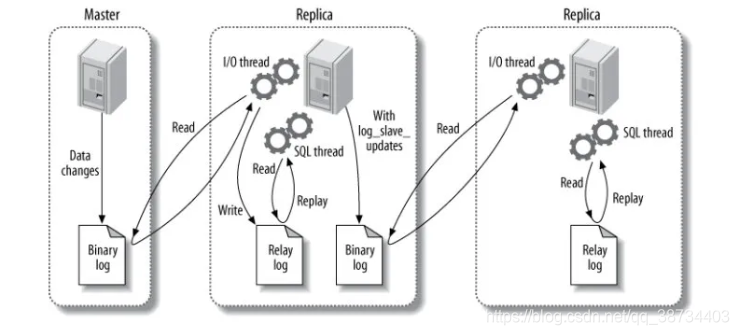
复制过程

Binary log:主数据库的二进制日志
Relay log:从服务器的中继日志
第一步:master在每个事务更新数据完成之前,将该操作记录串行地写入到binlog文件中。
第二步:salve开启一个I/O Thread,该线程在master打开一个普通连接,主要工作是binlog dump process。如果读取的进度已经跟上了master,就进入睡眠状态并等待master产生新的事件。I/O线程最终的目的是将这些事件写入到中继日志中。
第三步:SQL Thread会读取中继日志,并顺序执行该日志中的SQL事件,从而与主数据库中的数据保持一致。mysql主从复制主要有哪几种模式?
mysql主从同步怎么做?
mysql是集群还是单节点?最大连接数,最大的表中数据量大约是多少?
判断主库故障
- 《实战45-29》
set global innodb_thread_concurrency=3; - 1 方法1:select 1
--问题:
select 1 成功返回,只能说明库的进程还在,并不能说明主库没问题; - 并发连接和并发查询
--概念:
并发连接和并发查询,并不是同一个概念。show processlist 的结果里,看到的几千个连接,指的就是并发连接。而“当前正在执行”的语句,才是我们所说的并发查询。
--为什么设置innodb_thread_concurrency参数?
并发连接数达到几千个影响并不大,就是多占一些内存而已。我们应该关注的是并发查询,因为并发查询太高才是 CPU 杀手。一个机器的 CPU 核数有限,线程全冲进来,上下文切换的成本就会太高。
--InnoDB 中,innodb_thread_concurrency 这个参数的默认值是 0,表示不限制并发线程数量。
--通常,建议把 innodb_thread_concurrency 设置为 64~128 之间的值。
--问题:
同一行热点更新的问题时,是不是很快就把 128 消耗完了,这样整个系统是不是就挂了呢?
线程进入锁等待以后,并发线程的计数会减一,也就是说等行锁(也包括间隙锁)的线程是不算在 128 里面的。因为,进入锁等待的线程已经不吃 CPU 了;更重要的是,必须这么设计,才能避免整个系统锁死。
暂时不太理解select 1方法... - 2 方法2:查表判断
--描述:为了能够检测 InnoDB 并发线程数过多导致的系统不可用情况,一般的做法是,在系统库(mysql 库)里创建一个表,比如命名为health_check,里面只放一行数据,然后定期执行:
select * from mysql.health_check;
--这个方法,可以检测出由于并发线程过多导致的数据库不可用的情况。
--问题:
空间满了以后,这种方法又会变得不好使 - 3 更新判断-常用(记住这个)
--更新,放个有意义的字段,常见做法是放一个 timestamp 字段,用来表示最后一次执行检测的时间。
update mysql.health_check set t_modified=now();
--问题:
节点可用性的检测都应该包含主库和备库。如果用更新来检测主库的话,那么备库也要进行更新检测。但是,主 A 、备B 都用相同的更新命令,可能出现行冲突,也就是可能会导致主备同步停止。
--解决:因此,mysql.health_check 这个表就不能只有一行数据。可以在 mysql.health_check 表上存入多行数据,并用 A、B 的 server_id 做主键。由于 MySQL 规定了主库和备库的 server_id 必须不同(否则创建主备关系的时候就会报错),这样就可以保证主、备库各自的检测命令不会发生冲突。
---推进问题:判定慢(磁盘IO导致)
---解决:内部统计 - 4 内部统计
概念:针对磁盘利用率这个问题,如果 MySQL 可以告诉我们,内部每一次 IO 请求的时间,那我们判断数据库是否出问题的方法就可靠得多了。
--MySQL 5.6 版本以后提供的 performance_schema 库,就在file_summary_by_event_name 表里统计了每次 IO 请求的时间。
一主多从,主库故障,主备切换
- 《实战45-27》
- 1 一主多从架构
1)区别:
在一主一备的双 M 架构里,主备切换只需要把客户端流量切到备库;一主多从架构里,主备切换除了要把客户端流量切到备库外,还需要把从库接到新主库上。
2)一个基本的一主多从结构:
---虚线箭头表示的是主备关系,也就是 A 和 A’互为主备, 从库 B、C、D 指向的是主库 A。
---一主多从的设置,一般用于读写分离,主库负责所有的写入和一部分读,其他的读请求则由从库分担。
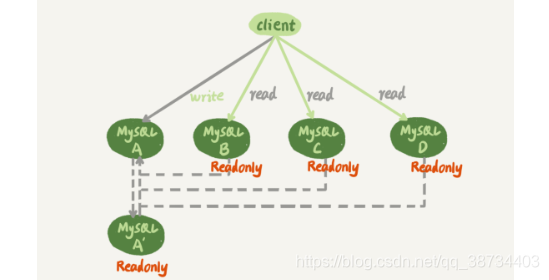
- 2 主库故障后的主备切换问题
--主库发生故障,主备切换后的结果:
--相比于一主一备的切换流程,一主多从结构在切换完成后,A’会成为新的主库,从库 B、C、D 也要改接到 A’。复杂性增加。
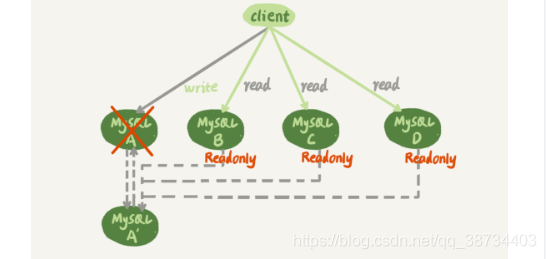
- 2.1一主多从的主备切换过程
- 1)基于位点的主备切换
--知识点:
节点 B 设置成节点 A’的从库的时候,需要执行一条 change master 命令:
这条命令有这么 6 个参数:
---MASTER_HOST、MASTER_PORT、MASTER_USER 和 MASTER_PASSWORD 四个参数,分别代表了主库 A’的 IP、端口、用户名和密码。
---MASTER_LOG_FILE 和 MASTER_LOG_POS 表示,要从主库的master_log_name 文件的 master_log_pos 这个位置的日志继续同步。而这个位置就是所说的同步位点,也就是主库对应的文件名和日志偏移量
CHANGE MASTER TO MASTER_HOST=port
MASTER_USER=password MASTER_LOG_FILE=master_log_pos
--参数设置:
B 要设置成 A’的从,执行 change master 命如何设置MASTER_LOG_FILE 和MASTER_LOG_POS参数?
①原,B是 A 的从,本地记录的也是 A 的位点。但日志相同,A 的位点和 A’的位点是不同的。故,B切换,要先“找同步位点”。
②位点很难精确取到,只能取一个大概位置。 - 找同步位
--如何取?:
考虑到切换过程中不能丢数据,所以找位点的时候,总是要找一个“稍微往前”的,然后再通过判断跳过那些在从库 B 上已经执行过的事务。
方法1:取同步位点:
1>等待新主库 A’把中转日志(relay log)全部同步完成;
2>在 A’上执行 show master status 命令,得到当前 A’上最新的 File 和 Position;
3>取原主库 A 故障的时刻 T;
4>用 mysqlbinlog 工具解析 A’的 File,得到 T 时刻的位点;
---end_log_pos 后面的值“123”,表示的就是 A’这个实例,在 T 时刻写入新的binlog 的位置。就可以把 123 这个值作为 host_name MASTER_PORT=user_name MASTER_PASSWORD=$password master_auto_position=1
---master_auto_position=1 就表示这个主备关系使用的是 GTID 协议
---实例 A’的 GTID 集合记为 set_a,实例 B 的 GTID 集合记为set_b。接下来,我们就看看现在的主备切换逻辑。
实例 B 上执行 start slave 命令,取 binlog 的逻辑是这样的:
1> 实例 B 指定主库 A’,基于主备协议建立连接。
2> 实例 B 把 set_b 发给主库 A’。
3> 实例 A’算出 set_a 与 set_b 的差集,也就是所有存在于 set_a,但是不存在于 set_b的 GTID 的集合,判断 A’本地是否包含了这个差集需要的所有 binlog 事务。
a. 如果不包含,表示 A’已经把实例 B 需要的 binlog 给删掉了,直接返回错误;
b. 如果确认全部包含,A’从自己的 binlog 文件里面,找出第一个不在 set_b 的事务,发给 B;
4>之后就从这个事务开始,往后读文件,按顺序取 binlog 发给 B 去执行。
---这个逻辑里面包含了一个设计思想:在基于 GTID 的主备关系里,系统认为只要建立主备关系,就必须保证主库发给备库的日志是完整的。因此,如果实例 B 需要的日志已经不存在,A’就拒绝把日志发给 B。
---这跟基于位点的主备协议不同。基于位点的协议,是由备库决定的,备库指定哪个位点,主库就发哪个位点,不做日志的完整性判断。 - 一主多从的切换场景下,主备切换是如何实现?
① 不需要找位点,所以从库 B、C、D 只需要分别执行 change master 命令指向实例A’即可。
(严谨地说,主备切换不是不需要找位点了,而是找位点这个工作,在实例 A’内部就已经自动完成了。)
② 之后这个系统就由新主库 A’写入,主库 A’的自己生成的 binlog 中的 GTID 集合格式是:server_uuid_of_A’:1-M。
③ 如果之前从库 B 的 GTID 集合格式是 server_uuid_of_A:1-N, 那么切换之后 GTID 集合的格式就变成了 server_uuid_of_A:1-N, server_uuid_of_A’:1-M。
④ 当然,主库 A’之前也是 A 的备库,因此主库 A’和从库 B 的 GTID 集合是一样的。这就达到了我们预期。
读写分离
- 《实战45-28》
- 一主多从架构的应用场景:读写分离,以及怎么处理主备延迟导致的读写分离问题。
1 读写分离基本概念
--目的:
目标就是分摊主库的压力;
结构1:客户端直连架构
一主多从的结构,就是读写分离的基本结构了:
客户端(client)主动做负载均衡,这种模式下一般会把数据库的连接信息放在客户端的连接层。

结构2:带 proxy 的读写分离架构
MySQL 和客户端之间有一个中间代理层 proxy,客户端只连接proxy, 由 proxy 根据请求类型和上下文决定请求的分发路由。

--两种方案的优劣:
趋势是往带 proxy 的架构方向发展的
1> 客户端直连方案:
因为少了一层 proxy 转发,所以查询性能稍微好一点儿,并且整体架构简单,排查问题更方便。但是这种方案,由于要了解后端部署细节,所以在出现主备切换、库迁移等操作的时候,客户端都会感知到,并且需要调整数据库连接信息。你可能会觉得这样客户端也太麻烦了,信息大量冗余,架构很丑。其实也未必,一般采用这样的架构,一定会伴随一个负责管理后端的组件,比如 Zookeeper,尽量让业务端只专注于业务逻辑开发。
2> 带 proxy 的架构:
对客户端比较友好。客户端不需要关注后端细节,连接维护、后端信息维护等工作,都是由 proxy 完成的。但这样的话,对后端维护团队的要求会更高。而且,proxy 也需要有高可用架构。因此,带 proxy 架构的整体就相对比较复杂2 主备延迟导致的问题
--问题:
两种架构都存在:由于主从可能存在延迟,客户端执行完一个更新事务后马上发起查询,如果查询选择的是从库的话,就有可能读到刚刚的事务更新之前的状态。即“在从库上会读到系统的一个过期状态”的现象。
--主从延迟还是不能 100% 避免的- 3 处理过期读的问题
--方案汇总:
1)强制走主库方案;
2)sleep 方案;
3)判断主备无延迟方案;
4)配合 semi-sync 方案;
5)等主库位点方案;
6)等 GTID 方案。 - 1)强制走主库方案-用的最多
--概念:就是将查询请求做分类;
--2类:
①对于必须要拿到最新结果的请求,强制将其发到主库上。
②对于可以读到旧数据的请求,才将其发到从库上。
--问题:
当“所有查询都不能是过期读”的需求,比如一些金融类的业务。这样的话,你就要放弃读写分离,所有读写压力都在主库,等同于放弃了扩展性。 - 2)Sleep 方案
--方案:主库更新后,读从库之前先 sleep 一下。具体的方案就是,类似于执行一条 select sleep(1) 命令。
--假设前提:大多数情况下主备延迟在 1 秒之内,做一个 sleep 可以有很大概率拿到最新的数据。
--问题:不精确
1如果这个查询请求本来 0.5 秒就可以在从库上拿到正确结果,也会等 1 秒;
2如果延迟超过 1 秒,还是会出现过期读。 - 3)判断主备无延迟方案
--确保备库无延迟,通常有三种做法。
--show slave status 结果的seconds_behind_master 参数的值,可以用来衡量主备延迟时间的长短。 - 1> 方法1
--每次从库执行查询请求前,先判断seconds_behind_master 是否已经等于 0。如果还不等于 0 ,那就必须等到这个参数变为0 才能执行查询请求。
--seconds_behind_master 的单位是秒,精度有限
--解决:
采用对比位点和GTID 的方法来确保主备无延迟,2.3方法 - 2> 方法2 对比位点确保主备无延迟
--Master_Log_File 和 Read_Master_Log_Pos,表示的是读到的主库的最新位点;
--Relay_Master_Log_File 和 Exec_Master_Log_Pos,表示的是备库执行的最新位点。
--如果 Master_Log_File 和 Relay_Master_Log_File、Read_Master_Log_Pos 和Exec_Master_Log_Pos 这两组值完全相同,就表示接收到的日志已经同步完成。 - 3>方法3 对比 GTID 集合确保主备无延迟
--Auto_Position=1 ,表示这对主备关系使用了 GTID 协议。
--Retrieved_Gtid_Set,是备库收到的所有日志的 GTID 集合;
--Executed_Gtid_Set,是备库所有已经执行完成的 GTID 集合。
如果这两个集合相同,也表示备库接收到的日志都已经同步完成。
对比位点和对比 GTID 这两种方法,都要比判断 seconds_behind_master 是否为 0更准确 - 4)配合 semi-sync
- 5)等主库位点方案
6)GTID 方案
- 读写分离
- 主服务器处理写操作以及实时性要求比较高的读操作,而从服务器处理读操作。
- 读写分离能提高性能的原因在于:
◆ 主从服务器负责各自的读和写,极大程度缓解了锁的争用;
◆ 从服务器可以使用 MyISAM,提升查询性能以及节约系统开销;
◆ 增加冗余,提高可用性。 读写分离常用代理方式来实现,代理服务器接收应用层传来的读写请求,然后决定转发到哪个服务器。
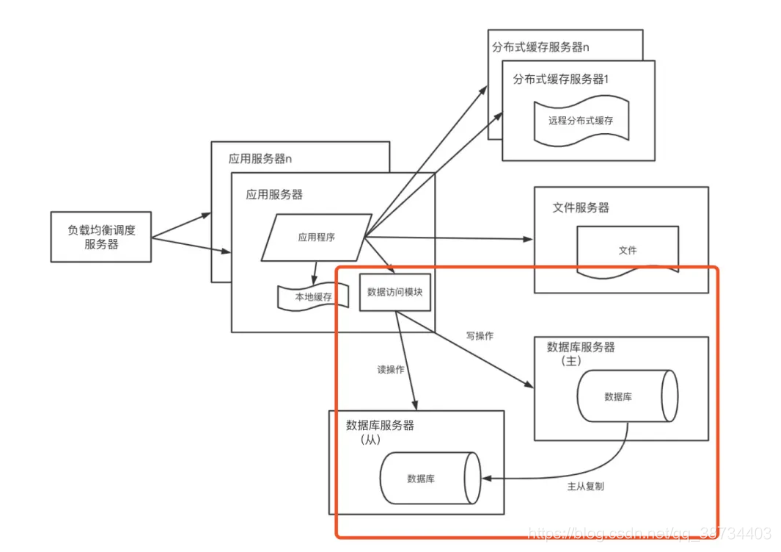
- 数据库的读写分离的作用?
因为数据库的“写”(写10000条数据到oracle可能要3分钟)操作是比较耗时的。
但是数据库的“读”(从oracle读10000条数据可能只要5秒钟)。
所以读写分离,解决的是,数据库的写入,影响了查询的效率
- 数据库的读写分离的作用?
分库分表
1. 基础查询
1-写sql
- sql查询1?
- 课程名中包含‘计算机’的课程且成绩小于60分学生的学号、姓名
select number,name from
- 课程名中包含‘计算机’的课程且成绩小于60分学生的学号、姓名
sql查询2?
- 成绩表中按照科目取最大成绩
sql查询2?
- 主要考察成绩查询的sql,考察到的知识点主要包括 order by,sum,limit,group by ... having ...
2-关键字
常用的函数?
- 聚集函数:count,sum
- 合并字符串函数:concat(str1,str2,str3…)
https://www.cnblogs.com/progor/p/8832663.html
Mysql如何拼接字符串?
1)CONCAT(string1,string2,…)
说明 : string1,string2代表字符串,concat函数在连接字符串的时候,只要其中一个是NULL,那么将返回NULL
2)CONCAT_WS(separator,str1,str2,...)
说明 : string1,string2代表字符串,concat_ws 代表 concat with separator,第一个参数是其它参数的分隔符。分隔符的位置放在要连接的两个字符串之间。分隔符可以是一个字符串,也可以是其它参数。如果分隔符为 NULL,则结果为 NULL。函数会忽略任何分隔符参数后的 NULL 值。
3)group_concat函数
完整的语法如下:
group_concat([DISTINCT] 要连接的字段 [Order BY ASC/DESC 排序字段] [Separator '分隔符'])Mysql去重关键字?
- distinct
in如何实现的?
数据库中JOIN是怎么实现的?
mysql的几种连接?
左连接、内连接、右连接right join原理
左外连接和内连接的区别? |2
1)内连接,显示两个表中有联系的所有数据;
2)左链接,以左表为参照,显示所有数据;
3)右链接,以右表为参照显示数据;
https://www.cnblogs.com/cs071122/p/6753681.html
3-其他
为什么要使用数据库? [-]
- 数据保存在内存
优点: 存取速度快
缺点: 数据不能永久保存 - 数据保存在文件
优点: 数据永久保存
缺点:1)速度比内存操作慢,频繁的IO操作。2)查询数据不方便 - 数据保存在数据库
1)数据永久保存
2)使用SQL语句,查询方便效率高。
3)管理数据方便
- 数据保存在内存
为什么在技术选型时选择MySQL,而不是选择Oracle?
- mysql是免费的,oracle是收钱的。
- 阿里去IOE;√
- MySQL 允许数据丢包,而且可以大量部署在PC server上。符合互联网的特点。Oracle是严谨的企业数据库,讲究就是数据一致性,所以传统行业比较适合。
- 主要是免费,其次它是开源的,高级一点的你可以修改它的源码使其符合你的要求,方便扩展,代价是需要会修改的人来做这种工作,Linux也一样,免费开源,可以修改到适合公司的修改
数据库三范式?
- 第一范式:每个列都不可以再拆分。确保每列的原子性.
- 第二范式:在第一范式的基础上,非主键列完全依赖于主键,而不能是依赖于主键的一部分。
- 第三范式:在第二范式的基础上,非主键列只依赖于主键,不依赖于其他非主键。
- 在设计数据库结构的时候,要尽量遵守三范式,如果不遵守,必须有足够的理由。比如性能。事实上我们经常会为了性能而妥协数据库的设计。
mysql的三种驱动类型?
1)Class.forName("com.mysql.jdbc.Driver");//加载数据库驱动
2)new com.mysql.jdbc.Driver() ;//创建driver对象,加载数据库驱动
https://www.iteye.com/blog/862123204-qq-com-1566581写SQL的注意事项?
7. 查询优化
https://thinkwon.blog.csdn.net/article/details/104778621
1. 慢查询如何分析排查和优化? |3
mysql如何优化(回答索引、拆分等) |5
mysql查询优化?
索引、关联子查询等,最常见的就是给表加上合适的索引mysql在项目中的优化场景?
分库分表的理解,好处
https://blog.csdn.net/u010817136/article/details/51037845数据库垂直与水平拆分怎么做?
分库分表数据切分- 水平切分
◆ 水平切分又称为 Sharding,它是将同一个表中的记录拆分到多个结构相同的表中。
◆ 当一个表的数据不断增多时,Sharding 是必然的选择,它可以将数据分布到集群的不同节点上,从而缓存单个数据库的压力。
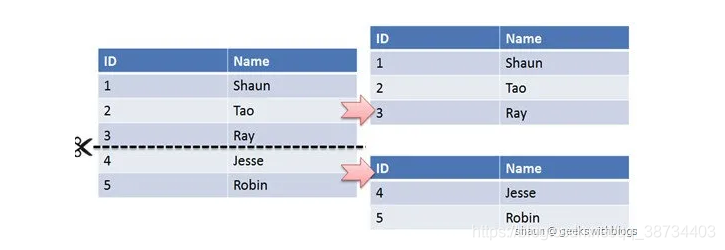
- 垂直切分
◆ 垂直切分是将一张表按列分成多个表,通常是按照列的关系密集程度进行切分,也可以利用垂直气氛将经常被使用的列喝不经常被使用的列切分到不同的表中。
◆ 在数据库的层面使用垂直切分将按数据库中表的密集程度部署到不通的库中,例如将原来电商数据部署库垂直切分称商品数据库、用户数据库等。
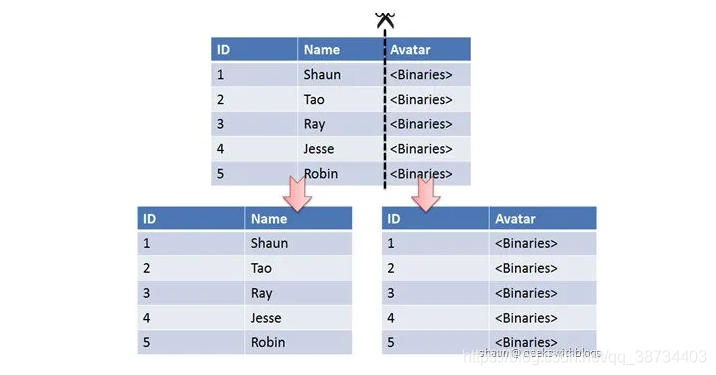
- Sharding 策略
◆ 哈希取模:hash(key)%N
◆ 范围:可以是 ID 范围也可以是时间范围
◆ 映射表:使用单独的一个数据库来存储映射关系 - Sharding 存在的问题
1)事务问题
使用分布式事务来解决,比如 XA 接口
2)连接
可以将原来的连接分解成多个单表查询,然后在用户程序中进行连接。
3)唯一性
◆ 使用全局唯一 ID (GUID)
◆ 为每个分片指定一个 ID 范围
◆ 分布式 ID 生成器(如 Twitter 的 Snowflake 算法)
- 水平切分
sql注入原理及解决方案?
https://www.cnblogs.com/jiaoxiaohui/p/10760763.html资料:
为什么大家都说SELECT * 效率低 - 老刘的文章 - 知乎
https://zhuanlan.zhihu.com/p/149981715
资料:★
https://thinkwon.blog.csdn.net/article/details/104778621
https://thinkwon.blog.csdn.net/article/details/104778621?utm_medium=distribute.pc_relevant.none-task-blog-OPENSEARCH-7.control&depth_1-utm_source=distribute.pc_relevant.none-task-blog-OPENSEARCH-7.control
https://mp.weixin.qq.com/s/J3kCOJwyv2nzvI0_X0tlnA
临时
数据库mysql索引? |6
- 索引概念
-- 官方介绍索引是帮助MySQL高效获取数据的数据结构。索引的功能相当于字典前面的拼音目录一样,能加快数据库的查询速度。(在数据之外,数据库系统还维护着满足特定查找算法的数据结构,这些数据结构以某种方式引用(指向)数据,这样就可以在这些数据结构上实现高级查找算法。这种数据结构,就是索引。)
-- 索引是一种特殊的文件(InnoDB数据表上的索引是表空间的一个组成部分),它们包含着对数据表里所有记录的引用指针。
-- 索引是一种数据结构。数据库索引,是数据库管理系统中一个排序的数据结构,以协助快速查询、更新数据库表中数据。索引的实现通常使用B树及其变种B+树。 - 存储:
一般来说索引本身也很大,不可能全部存储在内存中,因此索引往往是存储在磁盘上的文件中的(可能存储在单独的索引文件中,也可能和数据一起存储在数据文件中)。 - 分类:
我们通常所说的索引,包括聚集索引、覆盖索引、组合索引、前缀索引、唯一索引等,没有特别说明,默认都是使用B+树结构组织(多路搜索树,并不一定是二叉的)的索引。
- 索引概念
索引作用?
- 索引:对数据库中一列或多列的值进行排序的一种结构
- 作用:使用索引可以快速访问数据库表中特定信息(加速检索表中的数据)
- 索引的作用?
1)快速读取数据
2)保证数据记录的唯一性
3)实现表与表之间的参照完整性
4)在使用orderby ,group by子句进行检索时,索引可以减少排序和分组的时间。
数据库索引的优缺点?
索引的优势和劣势?
- 优势:
1)可以提高数据检索的效率,降低数据库的IO成本,类似于书的目录。
2)通过索引列对数据进行排序,降低数据排序的成本,降低了CPU的消耗。
-- 被索引的列会自动进行排序,包括【单列索引】和【组合索引】,只是组合索引的排序要复杂一些。
-- 如果按照索引列的顺序进行排序,对应order by语句来说,效率就会提高很多。 - 劣势:
1)创建索引和维护索引要耗费时间,并且随着数据量的增加所耗费的时间也会增加
2)索引会占据磁盘空间,数据表中的数据也会有最大上线设置的,如果我们有大量的索引,索引文件可能会比数据文件更快达到上线值
3)索引虽然会提高查询效率,但是会降低更新表的效率。比如每次对表进行增删改操作,MySQL不仅要保存数据,还有保存或者更新对应的索引文件。
- 优势:
索引的优点
- 大大减少了服务器需要扫描的数据行数。
- 帮助服务器避免进行排序和分组,以及避免创建临时表(B+Tree 索引是有序的,可以用于 ORDER BY 和 GROUP BY 操作。临时表主要是在排序和分组过程中创建,不需要排序和分组,也就不需要创建临时表)。
- 将随机 I/O 变为顺序 I/O(B+Tree索引是有序的,会将相邻的数据都存储在一起)。
索引优点
- 1)大大加快数据的检索速度
2)创建唯一性索引,保证数据库中的每一行数据的唯一性。
3)加速表与表之间的连接
4)在使用分组和排序进行检索时,可以显著的减少查询的时间。
- 1)大大加快数据的检索速度
Mysql索引的坏处是什么?
1)创建索引和维护索引要耗费时间,这种时间随着数据量的增加而增加。
2)索引需要占物理空间,除了数据表占数据空间之外,每一个索引还要占一定的物理空间,如果要建立聚簇索引,那么需要的空间就会更大。
3)当对表中的数据进行增加、删除和修改的时候,索引也要动态的维护,这样就降低了数据的维护速度。
https://blog.csdn.net/kennyrose/article/details/7532032InnoDB引擎的4大特性[-]
插入缓冲(insert buffer)
二次写(double write)
自适应哈希索引(ahi)
预读(read ahead)索引,为什么选择自增?
- InnoDB使用聚集索引,数据记录本身被存于主索引(一颗B+Tree)的叶子节点上。这就要求同一个叶子节点内(大小为一个内存页或磁盘页)的各条数据记录按主键顺序存放,因此每当有一条新的记录插入时,MySQL会根据其主键将其插入适当的节点和位置,如果页面达到装载因子(InnoDB默认为15/16),则开辟一个新的页(节点)。
- 如果表使用自增主键,那么每次插入新的记录,记录就会顺序添加到当前索引节点的后续位置,当一页写满,就会自动开辟一个新的页。
这样就会形成一个紧凑的索引结构,近似顺序填满。由于每次插入时也不需要移动已有数据,因此效率很高,也不会增加很多开销在维护索引上。 - 如果使用非自增主键(如果身份证号或学号等),由于每次插入主键的值近似于随机,因此每次新纪录都要被插到现有索引页得中间某个位置,此时MySQL不得不为了将新记录插到合适位置而移动数据,甚至目标页面可能已经被回写到磁盘上而从缓存中清掉,此时又要从磁盘上读回来,这增加了很多开销,同时频繁的移动、分页操作造成了大量的碎片,得到了不够紧凑的索引结构,后续不得不通过OPTIMIZETABLE来重建表并优化填充页面。
2-原理
索引模型是什么?
- 常见的索引模型有哈希表、有序数组、B+树。
https://www.cnblogs.com/fly-bryant/p/13195465.html
- 常见的索引模型有哈希表、有序数组、B+树。
索引的底层/mysql索引数据结构? |3
- 准确说,mysql默认的存储引擎 InnoDB使用的是B+树
索引原理?
- 索引用来快速地寻找那些具有特定值的记录。如果没有索引,一般来说执行查询时遍历整张表。
- 索引的原理很简单,就是把无序的数据变成有序的查询
1)把创建了索引的列的内容进行排序
2)对排序结果生成倒排表
3)在倒排表内容上拼上数据地址链
4)在查询的时候,先拿到倒排表内容,再取出数据地址链,从而拿到具体数据
https://www.cnblogs.com/klb561/p/10666296.html
https://blog.csdn.net/weixin_42181824/article/details/82261988
数据库的索引原理 ???
通常是「平衡树」(非二叉),也就是b tree及其变种B+树。
https://blog.csdn.net/kennyrose/article/details/7532032
https://blog.csdn.net/z_ryan/article/details/79685072 √
https://www.cnblogs.com/harderman-mapleleaves/p/4528212.html
https://www.cnblogs.com/makai/p/10861296.html
https://www.cnblogs.com/aspwebchh/p/6652855.htmlMySQL索引数据结构? |4
- (b树,hash)
-- 索引的数据结构和具体存储引擎的实现有关,在MySQL中使用较多的索引有Hash索引,B+树索引等;常用的InnoDB存储引擎的默认索引实现为:B+树索引。对于哈希索引来说,底层的数据结构就是哈希表,因此在绝大多数需求为单条记录查询的时候,可以选择哈希索引,查询性能最快;其余大部分场景,建议选择BTree索引。
-- 索引是在存储引擎层实现的,而不是在服务器层实现的,所以不同存储引擎具有不同的索引类型和实现。 - B+ Tree 索引
• 是大多数 MySQL 存储引擎的默认索引类型。
-- 因为不再需要进行全表扫描,只需要对树进行搜索即可,所以查找速度快很多。
-- 因为 B+ Tree 的有序性,所以除了用于查找,还可以用于排序和分组。
-- 可以指定多个列作为索引列,多个索引列共同组成键。
-- 适用于全键值、键值范围和键前缀查找,其中键前缀查找只适用于最左前缀查找。如果不是按照索引列的顺序进行查找,则无法使用索引。
• InnoDB 的 B+Tree 索引分为主索引和辅助索引。主索引的叶子节点 data 域记录着完整的数据记录,这种索引方式被称为聚簇索引。因为无法把数据行存放在两个不同的地方,所以一个表只能有一个聚簇索引。

• 辅助索引的叶子节点的data域记录着主键的值,因此在使用辅助索引进行查找时,需要先查找到主键值,然后再到主索引中进行查找,这个过程也被称作回表。
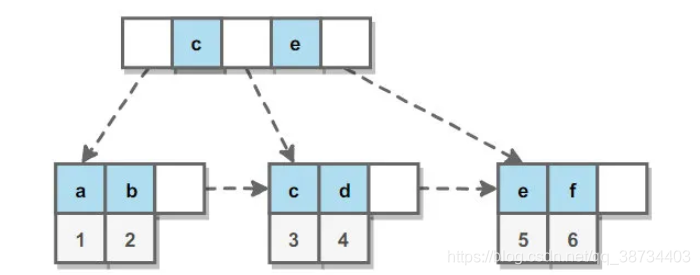
- 哈希索引
• 哈希索引能以 O(1) 时间进行查找,但是失去了有序性:
-- 无法用于排序与分组;
-- 只支持精确查找,无法用于部分查找和范围查找。
• InnoDB 存储引擎有一个特殊的功能叫“自适应哈希索引”,当某个索引值被使用的非常频繁时,会在 B+Tree 索引之上再创建一个哈希索引,这样就让 B+Tree 索引具有哈希索引的一些优点,比如快速的哈希查找。
• 类似于数据结构中简单实现的HASH表(散列表)一样,当我们在mysql中用哈希索引时,主要就是通过Hash算法(常见的Hash算法有直接定址法、平方取中法、折叠法、除数取余法、随机数法),将数据库字段数据转换成定长的Hash值,与这条数据的行指针一并存入Hash表的对应位置;如果发生Hash碰撞(两个不同关键字的Hash值相同),则在对应Hash键下以链表形式存储。当然这只是简略模拟图。
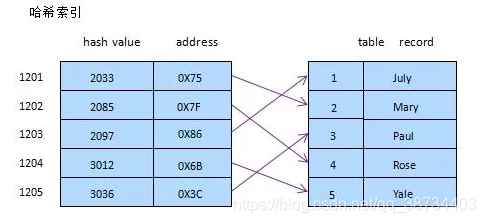
- (b树,hash)
索引算法有哪些? [-]
- 索引算法有 BTree算法和Hash算法
BTree算法
BTree是最常用的mysql数据库索引算法,也是mysql默认的算法。因为它不仅可以被用在=,>,>=,<,<=和between这些比较操作符上,而且还可以用于like操作符,只要它的查询条件是一个不以通配符开头的常量, 例如:-- 只要它的查询条件是一个不以通配符开头的常量select * from user where name like 'jack%';-- 如果一通配符开头,或者没有使用常量,则不会使用索引,例如:select * from user where name like '%jack';
Hash算法
Hash Hash索引只能用于对等比较,例如=,<=>(相当于=)操作符。由于是一次定位数据,不像BTree索引需要从根节点到枝节点,最后才能访问到页节点这样多次IO访问,所以检索效率远高于BTree索引。
??
索引是在存储引擎中实现的,而不是在服务器层中实现的。所以,每种存储引擎的索引都不一定完全相同,并不是所有的存储引擎都支持所有的索引类型。- 1 B-Tree索引
- 2 Hash索引
如果多个值有相同的hash code,索引把它们的行指针用链表保存到同一个hash表项中。 - 3 空间(R-Tree)索引
MyISAM支持空间索引,主要用于地理空间数据类型。 - 4 全文(Full-text)索引
全文索引是MyISAM的一个特殊索引类型,主要用于全文检索。 - 全文索引
-- MyISAM 存储引擎支持全文索引,用于查找文本中的关键词,而不是直接比较是否相等。
-- 查找条件使用 MATCH AGAINST,而不是普通的 WHERE。
-- 全文索引使用倒排索引实现,它记录着关键词到其所在文档的映射。
-- InnoDB 存储引擎在 MySQL 5.6.4 版本中也开始支持全文索引。 - 空间数据索引
-- MyISAM 存储引擎支持空间数据索引(R-Tree),可以用于地理数据存储。空间数据索引会从所有维度来索引数据,可以有效地使用任意维度来进行组合查询。
-- 必须使用 GIS 相关的函数来维护数据。
InnoDB和MyISAM
1)InnoDB- InnoDB也使用B+Tree作为索引结构
- InnoDB中,表数据文件本身就是按B+Tree组织的一个索引结构,这棵树的叶节点data域保存了完整的数据记录。这个索引的key是数据表的主键,因此InnoDB表数据文件本身就是主索引。
- InnoDB的辅助索引:InnoDB的所有辅助索引都引用主键作为data域。
- InnoDB 表是基于聚簇索引建立的。
2)MyISAM - MyISAM索引文件和数据文件是分离的,索引文件仅保存数据记录的地址
- MyISAM引擎使用B+Tree作为索引结构,叶节点的data域存放的是数据记录的地址。
- 在MyISAM中,主索引和辅助索引(Secondary key)在结构上没有任何区别,只是主索引要求key是唯一的,而辅助索引的key可以重复
- 同样也是一颗B+Tree,data域保存数据记录的地址。
- MyISM使用的是非聚簇索引,
3)问题:主键索引是聚集索引还是非聚集索引?
在Innodb下主键索引是聚集索引,在Myisam下主键索引是非聚集索引
https://www.cnblogs.com/jiawen010/p/11805241.html ★
主键索引与非主键索引有什么区别 ?
- 主键索引和非主键索引的区别是:非主键索引的叶子节点存放的是主键的值,而主键索引的叶子节点存放的是整行数据,其中非主键索引也被称为二级索引,而主键索引也被称为聚簇索引。
什么是聚簇索引?何时使用聚簇索引与非聚簇索引 [-]
- 聚簇索引:将数据存储与索引放到了一块,找到索引也就找到了数据
- 非聚簇索引:将数据存储于索引分开结构,索引结构的叶子节点指向了数据的对应行,myisam通过key_buffer把索引先缓存到内存中,当需要访问数据时(通过索引访问数据),在内存中直接搜索索引,然后通过索引找到磁盘相应数据,这也就是为什么索引不在key buffer命中时,速度慢的原因
- 澄清一个概念:innodb中,在聚簇索引之上创建的索引称之为辅助索引,辅助索引访问数据总是需要二次查找,非聚簇索引都是辅助索引,像复合索引、前缀索引、唯一索引,辅助索引叶子节点存储的不再是行的物理位置,而是主键值何时使用聚簇索引与非聚簇索引
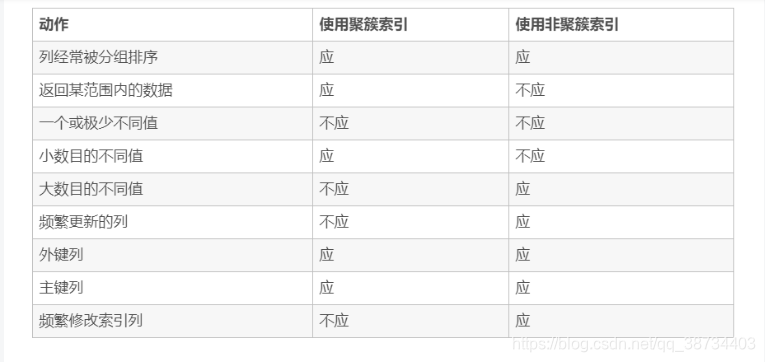
聚簇索引和非聚簇索引?
高性能的索引策略
1 聚簇索引(Clustered Indexes)
https://www.cnblogs.com/whgk/p/6179612.html
https://www.cnblogs.com/likeju/p/5409102.html
2 聚簇索引和非聚簇索引- 聚簇索引并不是一种单独的索引类型,而是一种数据存储方式。都是b+树
- 场景
平时,我们使用Mysql数据库,会为主键建立一个B+树索引,当我们基于主键搜索的时候,比如“where id = 666”,这时候,就会用到索引,将文件最终的存放地址找出来并加载,而当我们使用没有建立索引的字段进行搜索的时候,比如“where parm = ’笑笑笑笑‘”,这样子的,就不会用到索引。 - 聚簇索引
就是为这个不是主键的字段建立了索引,并且B+树的叶子节点最终保存了数据的行信息,可以通过这个索引直接获取行数据,而不必再通过主键索引查找数据 - 非聚簇索引
就是当我们为不是主键的字段建立索引的时候,在这个索引B+树结构的叶子结点中,并不会想主键索引那样存储行数据,而是存储了主键的信息,找到主键之后,在通过主键索引查找出数据来 - Mysql5.7之后默认的存储引擎是InnoDb,InnoDb的索引是聚簇索引。
- 优缺点
聚簇索引的优点就是数据发生变化的时候,不用再去维护非主键索引了,因为存储的知识主键的信息,由于行数据和叶子节点存储在一起,主键和行数据是一起被载入内存的,找到叶子节点就可以立刻返回数据。https://blog.csdn.net/weixin_37641413/article/details/97823120 - 区别 在《数据库原理》一书中是这么解释聚簇索引和非聚簇索引的区别的:
聚簇索引的叶子节点就是数据节点,而非聚簇索引的叶子节点仍然是索引节点,只不过有指向对应数据块的指针。
https://www.cnblogs.com/jiawen010/p/11805241.html ★
https://www.cnblogs.com/qlqwjy/p/8592684.html
聚簇索引和非聚簇索引的区别?
答了聚簇索引:结构、建立(主键上建立、无主键则选择第一个唯一索引,若都没有主键和唯一索引则隐藏有一个字段实现聚簇索引)
非聚簇结构、非聚簇索引一定会回表查询吗?[-]
- 不一定,这涉及到查询语句所要求的字段是否全部命中了索引,如果全部命中了索引,那么就不必再进行回表查询。
- 举个简单的例子,假设我们在员工表的年龄上建立了索引,那么当进行select age from employee where age<20的查询时,在索引的叶子节点上,已经包含了age信息,不会再次进行回表查询。
B+树在满足聚簇索引和覆盖索引的时候不需要回表查询数据,[-]
-- 在B+树的索引中,叶子节点可能存储了当前的key值,也可能存储了当前的key值以及整行的数据,这就是聚簇索引和非聚簇索引。 在InnoDB中,只有主键索引是聚簇索引,如果没有主键,则挑选一个唯一键建立聚簇索引。如果没有唯一键,则隐式的生成一个键来建立聚簇索引。
-- 当查询使用聚簇索引时,在对应的叶子节点,可以获取到整行数据,因此不用再次进行回表查询。Mysql回表?回表问题?
- 回表概念:
-- 回表就是先通过数据库索引扫描出数据所在的行,再通过行主键id取出索引中未提供的数据,即基于非主键索引的查询需要多扫描一棵索引树。
-- 因此,可以通过索引先查询出id字段,再通过主键id字段,查询行中的字段数据,即通过再次查询提供MySQL查询速度。
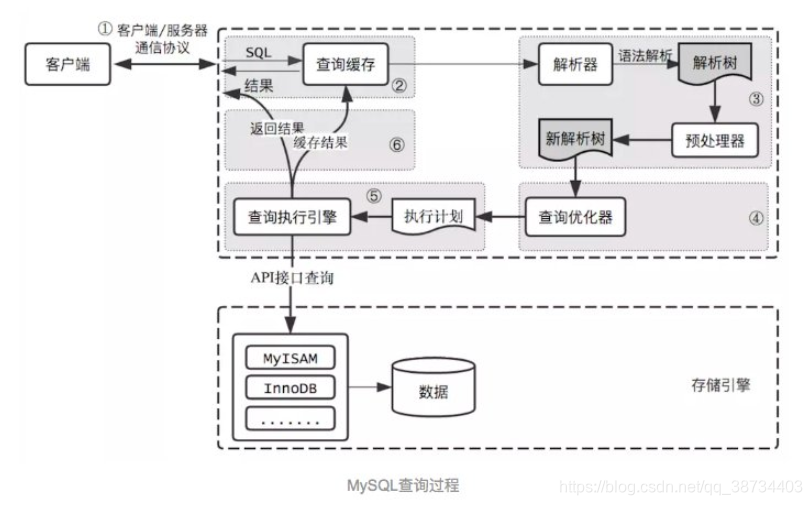
- 回表概念:
回表的过程,磁盘读几次,跟数据在内存中比哪个快?
- 非聚簇索引所要求的字段如果全部命中了索引,不需要会表
- 回表:再重新遍历索引树,双倍io
联合索引是什么?为什么需要注意联合索引中的顺序?[-]
- MySQL可以使用多个字段同时建立一个索引,叫做联合索引。在联合索引中,如果想要命中索引,需要按照建立索引时的字段顺序挨个使用,否则无法命中索引。
- 具体原因为:
- MySQL使用索引时需要索引有序,假设现在建立了"name,age,school"的联合索引,那么索引的排序为: 先按照name排序,如果name相同,则按照age排序,如果age的值也相等,则按照school进行排序。
- 当进行查询时,此时索引仅仅按照name严格有序,因此必须首先使用name字段进行等值查询,之后对于匹配到的列而言,其按照age字段严格有序,此时可以使用age字段用做索引查找,以此类推。因此在建立联合索引的时候应该注意索引列的顺序,一般情况下,将查询需求频繁或者字段选择性高的列放在前面。此外可以根据特例的查询或者表结构进行单独的调整。
Mysql对联合索引有优化么?会自动调整顺序么?哪个版本开始优化?
前缀索引 [-]
- 语法:index(field(10)),使用字段值的前10个字符建立索引,默认是使用字段的全部内容建立索引。
- 前提:前缀的标识度高。比如密码就适合建立前缀索引,因为密码几乎各不相同。
- 实操的难度:在于前缀截取的长度。
- 可以利用select count(*)/count(distinct left(password,prefixLen));,通过从调整prefixLen的值(从1自增)查看不同前缀长度的一个平均匹配度,接近1时就可以了(表示一个密码的前prefixLen个字符几乎能确定唯一一条记录)
什么是最左前缀原则?什么是最左匹配原则 [-]
- 顾名思义,就是最左优先,在创建多列索引时,要根据业务需求,where子句中使用最频繁的一列放在最左边。
- 最左前缀匹配原则,非常重要的原则,mysql会一直向右匹配直到遇到范围查询(>、<、between、like)就停止匹配,比如a = 1 and b = 2 and c > 3 and d = 4 如果建立(a,b,c,d)顺序的索引,d是用不到索引的,如果建立(a,b,d,c)的索引则都可以用到,a,b,d的顺序可以任意调整。
- =和in可以乱序,比如a = 1 and b = 2 and c = 3 建立(a,b,c)索引可以任意顺序,mysql的查询优化器会帮你优化成索引可以识别的形式
联合索引的最左匹配原则? |2
(答了:建立多列索引、多列索引顺序性和索引下推)从底层解释最左匹配原则?
mysql存储引擎索引优化?
- 避免回表
- 使用联合索引
mysql索引有哪些,都有什么特点?
- 数据库索引类型有哪些? |5
索引的分类/索引有哪几种类型?
- 主键索引: 数据列不允许重复,不允许为NULL,一个表只能有一个主键。
- 唯一索引: 数据列不允许重复,允许为NULL值,一个表允许多个列创建唯一索引。
• 可以通过 ALTER TABLE table_name ADD UNIQUE (column); 创建唯一索引
• 可以通过 ALTER TABLE table_name ADD UNIQUE (column1,column2); 创建唯一组合索引 - 普通索引: 基本的索引类型,没有唯一性的限制,允许为NULL值。
• 可以通过ALTER TABLE table_name ADD INDEX index_name (column);创建普通索引
• 可以通过ALTER TABLE table_name ADD INDEX index_name(column1, column2, column3);创建组合索引 - 全文索引: 是目前搜索引擎使用的一种关键技术。
• 可以通过ALTER TABLE table_name ADD FULLTEXT (column);创建全文索引
索引的分类?
mytable表:
CREATE TABLE mytable(ID INT NOT NULL,username VARCHAR(16) NOT NULL,city VARCHAR(50) NOT NULL,age INT NOT NULL);
1)单例索引
一个索引只包含单个列,但一个表中可以有多个单列索引。
① 普通索引
没有什么限制,允许在定义索引的列中插入重复值和空值。◆ 创建1:创建索引CREATE INDEX indexName ON mytable(username(length));-- 如果是CHAR,VARCHAR类型,length可以小于字段实际长度;如果是BLOB和TEXT类型,必须指定 length,下同。◆ 创建2:修改表结构ALTER mytable ADD INDEX [indexName] ON (username(length))◆ 创建3:创建表的时候直接指定CREATE TABLE mytable(:ID INT NOT NULL,username VARCHAR(16) NOT NULL,INDEX [indexName] (username(length)));◆ 删除索引的语法:DROP INDEX [indexName] ON mytable;
② 唯一索引
索引列中的值必须是唯一的,但是允许为空值。◆ 创建索引CREATE UNIQUE INDEX indexName ON mytable(username(length))◆ 修改表结构ALTER mytable ADD UNIQUE [indexName] ON (username(length))◆ 创建表的时候直接指定CREATE TABLE mytable(ID INT NOT NULL,username VARCHAR(16) NOT NULL,UNIQUE [indexName] (username(length)));
③ 主键索引
是一种特殊的唯一索引,不允许有空值。◆ 创建:一般是在建表的时候同时创建主键索引:CREATE TABLE mytable(ID INT NOT NULL,username VARCHAR(16) NOT NULL,PRIMARY KEY(ID));
当然也可以用 ALTER 命令。记住:一个表只能有一个主键。
2) 组合索引
在表中的多个字段组合上创建的索引,只有在查询条件中使用了这些字段的左边字段时,索引才会被使用,使用组合索引时遵循最左前缀集合。◆ 创建:将 name, city, age建到一个索引里:ALTER TABLE mytable ADD INDEX name_city_age (name(10),city,age);◆ 使用:“最左前缀”都会用到usernname,city,age | usernname,city | usernnameSELECT * FROM mytable WHREE username="admin" AND city="郑州"SELECT * FROM mytable WHREE username="admin"
3) 全文索引
在一堆文字中,通过其中的某个关键字等,就能找到该字段所属的记录行,比如有"你是个大煞笔,二货 ..." 通过大煞笔,可能就可以找到该条记录。
只有在MyISAM引擎上才能使用,只能在CHAR,VARCHAR,TEXT类型字段上使用全文索引。
FULLTEXT- 4) 空间索引
空间索引是对空间数据类型的字段建立的索引,MySQL中的空间数据类型有四种,GEOMETRY、POINT、LINESTRING、POLYGON。
在创建空间索引时,使用SPATIAL关键字。
要求,引擎为MyISAM,创建空间索引的列,必须将其声明为NOT NULL。
SPATIAL
mysql索引类型?
单列索引(普通索引,唯一索引,主键索引)、组合索引、全文索引、空间索引索引之间的区别
1) 单列索引:一个索引只包含单个列,但一个表中可以有多个单列索引。- 普通索引:没有什么限制,允许在定义索引的列中插入重复值和空值;
- 唯一索引:索引列中的值必须是唯一的,允许为null
- 主键索引:一种特殊的唯一索引,不允许有null。
2)组合索引
在表中的多个字段组合上创建的索引,只有在查询条件中使用了这些字段的左边字段时,索引才会被使用,使用组合索引时遵循最左前缀集合;
3)全文索引:只有在MyISAM引擎上才能使用,只能在CHAR,VARCHAR,TEXT类型字段上使用全文索引,在一堆文字中,通过其中的某个关键字等,就能找到该字段所属的记录行;
4)空间索引:空间索引是对空间数据类型的字段建立的索引,MySQL中的空间数据类型有四种,GEOMETRY、POINT、LINESTRING、POLYGON。
在创建空间索引时,使用SPATIAL关键字。
要求,引擎为MyISAM,创建空间索引的列,必须将其声明为NOT NULL。
3-创建索引|使用
怎么建立索引1?
select * from t where b=1;
Select * from t where a=1 and b=1;
先说需要建两个索引,后来反应过来了,建一个联合索引。怎么建索引2?
select * from a=1 and b>2 or c in(1,2,3)场景题:音乐界面和评论,如何建立表和索引
Select * from t where c=1;
C是非主键索引,问几次磁盘io,b+索引树高度3。mysql给性别建立索引 和 直接查询 有区别吗?
- 重复性较强的字段,不适合添加索引,列的离散度太低,索引查询效率很低的
- 建了索引数据库也不一定会用到,只会白白增加索引维护的额外开销,因为索引也是需要存储的,所以插入和更新的写入操作,同时需要插入和更新你这个字段的索引的.
所以说,唯一性太差的字段不需要创建索引,即便用于where条件.
https://www.cnblogs.com/mkl34367803/p/13096564.html
只有一个字段,字段值都是汉字,建立索引后是如何排序的 ?
索引:A>0 B =3 C=1 会不会走索引?
一列只有8中情况的数据,另一列不确认,哪一列适合建索引?
索引语句
CREATE TABLE table_name[col_name data type][unique|fulltext][index|key][index_name](col_name[length])[asc|desc]
- col_name:需要创建索引的字段列
- unique|fulltext:可选参数,唯一索引|全文索引
- index和key:两者作用相同,用来指定创建索引
- index_name:指定索引的名称,可选参数,默认col_name为索引值
- length:可选参数,索引的长度,只有字符串类型的字段才能指定索引长度
- asc或desc指定升序或降序的索引值存储
https://www.cnblogs.com/luyucheng/p/6289714.html
怎么建索引? |2
https://www.cnblogs.com/whgk/p/6179612.html
创建索引的三种方式,删除索引? [-]第一种方式:在执行CREATE TABLE时创建索引
CREATE TABLE user_index2 (id INT auto_increment PRIMARY KEY,first_name VARCHAR (16),last_name VARCHAR (16),id_card VARCHAR (18),information text,KEY name (first_name, last_name),FULLTEXT KEY (information),UNIQUE KEY (id_card));
第二种方式:使用ALTER TABLE命令去增加索引
ALTER TABLE table_name ADD INDEX index_name (column_list);
-- ALTER TABLE用来创建普通索引、UNIQUE索引或PRIMARY KEY索引。
-- 其中,table_name是要增加索引的表名,column_list指出对哪些列进行索引,多列时各列之间用逗号分隔。
-- 索引名index_name可自己命名,缺省时,MySQL将根据第一个索引列赋一个名称。另外,ALTER TABLE允许在单个语句中更改多个表,因此可以在同时创建多个索引。- 第三种方式:使用CREATE INDEX命令创建
CREATE INDEX index_name ON table_name (column_list);
-- CREATE INDEX可对表增加普通索引或UNIQUE索引。(但是,不能创建PRIMARY KEY索引)
- 删除索引
-- 根据索引名删除普通索引、唯一索引、全文索引:alter table 表名 drop KEY 索引名
alter table user_index drop KEY name;alter table user_index drop KEY id_card;alter table user_index drop KEY information;
-- 删除主键索引:alter table 表名 drop primary key(因为主键只有一个)。这里值得注意的是,如果主键自增长,那么不能直接执行此操作(自增长依赖于主键索引):
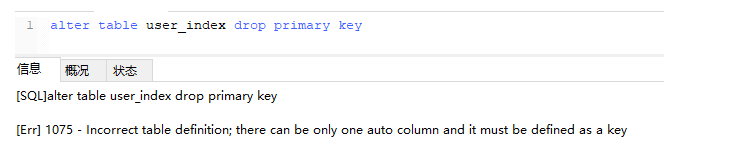
-- 需要取消自增长再行删除:
-- 但通常不会删除主键,因为设计主键一定与业务逻辑无关。alter table user_index-- 重新定义字段MODIFY id int,drop PRIMARY KEY
百万级别或以上的数据如何删除 [-]
- 关于索引:由于索引需要额外的维护成本,因为索引文件是单独存在的文件,所以当我们对数据的增加,修改,删除,都会产生额外的对索引文件的操作,这些操作需要消耗额外的IO,会降低增/改/删的执行效率。所以,在我们删除数据库百万级别数据的时候,查询MySQL官方手册得知删除数据的速度和创建的索引数量是成正比的。
1) 所以我们想要删除百万数据的时候可以先删除索引(此时大概耗时三分多钟)
2) 然后删除其中无用数据(此过程需要不到两分钟)
3) 删除完成后重新创建索引(此时数据较少了)创建索引也非常快,约十分钟左右。
4) 与之前的直接删除绝对是要快速很多,更别说万一删除中断,一切删除会回滚。那更是坑了。
- 关于索引:由于索引需要额外的维护成本,因为索引文件是单独存在的文件,所以当我们对数据的增加,修改,删除,都会产生额外的对索引文件的操作,这些操作需要消耗额外的IO,会降低增/改/删的执行效率。所以,在我们删除数据库百万级别数据的时候,查询MySQL官方手册得知删除数据的速度和创建的索引数量是成正比的。
创建索引的原则(重中之重)
- 索引虽好,但也不是无限制的使用,最好符合一下几个原则
1) 最左前缀匹配原则,组合索引非常重要的原则,mysql会一直向右匹配直到遇到范围查询(>、<、between、like)就停止匹配,比如a = 1 and b = 2 and c > 3 and d = 4 如果建立(a,b,c,d)顺序的索引,d是用不到索引的,如果建立(a,b,d,c)的索引则都可以用到,a,b,d的顺序可以任意调整。
2)较频繁作为查询条件的字段才去创建索引
3)更新频繁字段不适合创建索引
4)若是不能有效区分数据的列不适合做索引列(如性别,男女未知,最多也就三种,区分度实在太低)
5)尽量的扩展索引,不要新建索引。比如表中已经有a的索引,现在要加(a,b)的索引,那么只需要修改原来的索引即可。
6)定义有外键的数据列一定要建立索引。
7)对于那些查询中很少涉及的列,重复值比较多的列不要建立索引。
8)对于定义为text、image和bit的数据类型的列不要建立索引。
- 索引虽好,但也不是无限制的使用,最好符合一下几个原则
建索引时需要注意什么? [-]
- 非空字段:应该指定列为NOT NULL,除非你想存储NULL。在mysql中,含有空值的列很难进行查询优化,因为它们使得索引、索引的统计信息以及比较运算更加复杂。你应该用0、一个特殊的值或者一个空串代替空值;
- 取值离散大的字段:(变量各个取值之间的差异程度)的列放到联合索引的前面,可以通过count()函数查看字段的差异值,返回值越大说明字段的唯一值越多字段的离散程度高;
- 索引字段越小越好:数据库的数据存储以页为单位一页存储的数据越多一次IO操作获取的数据越大效率越高。
MySQL建立索引有什么规则 ?
索引的使用注意事项
1)哪些情况下不需要使用索引
2)索引不可用的情况
3)索引不会被使用的几种情况
https://www.cnblogs.com/xyhero/p/b0ad525c6a6a5ed2bd7f40918c5dbd98.html使用原则:
1、对经常更新的表就避免对其进行过多的索引,对经常用于查询的字段应该创建索引,
2、数据量小的表最好不要使用索引,因为由于数据较少,可能查询全部数据花费的时间比遍历索引的时间还要短,索引就可能不会产生优化效果。
3、在一同值少的列上(字段上)不要建立索引,比如在学生表的"性别"字段上只有男,女两个不同值。相反的,在一个字段上不同值较多可是建立索引索引的使用条件? [-]
- 对于非常小的表、大部分情况下简单的全表扫描比建立索引更高效;
- 对于中到大型的表,索引就非常有效;
- 但是对于特大型的表,建立和维护索引的代价将会随之增长。这种情况下,需要用到一种技术可以直接区分出需要查询的一组数据,而不是一条记录一条记录地匹配,例如可以使用分区技术。
为什么对于非常小的表,大部分情况下简单的全表扫描比建立索引更高效?
- 如果一个表比较小,那么显然直接遍历表比走索引要快(因为需要回表)。
- 注:首先,要注意这个答案隐含的条件是查询的数据不是索引的构成部分,否也不需要回表操作。其次,查询条件也不是主键,否则可以直接从聚簇索引中拿到数据。
索引设计的原则?[-]
适合索引的列是出现在where子句中的列,或者连接子句中指定的列
基数较小的类,索引效果较差,没有必要在此列建立索引
使用短索引,如果对长字符串列进行索引,应该指定一个前缀长度,这样能够节省大量索引空间
不要过度索引。索引需要额外的磁盘空间,并降低写操作的性能。在修改表内容的时候,索引会进行更新甚至重构,索引列越多,这个时间就会越长。所以只保持需要的索引有利于查询即可。哪些建立索引比较适合(比如性别建立索引合适吗)
索引是建立在数据库表中的某些列的上面。在创建索引的时候,应该考虑在哪些列上可以创建索引,在哪些列上不能创建索引。一般来说,应该在这些列上创建索引:在经常需要搜索的列上,可以加快搜索的速度;在作为主键的列上,强制该列的唯一性和组织表中数据的排列结构;在经常用在连接的列上,这些列主要是一些外键,可以加快连接的速度;在经常需要根据范围进行搜索的列上创建索引,因为索引已经排序,其指定的范围是连续的;在经常需要排序的列上创建索引,因为索引已经排序,这样查询可以利用索引的排序,加快排序查询时间;在经常使用在WHERE子句中的列上面创建索引,加快条件的判断速度。
https://blog.csdn.net/kennyrose/article/details/7532032
5-redis
redis启动流程
一条指令的执行
- 上|下
一条命令执行完成并且返回数据一共涉及三部分,第一步是建立连接阶段,响应了socket的建立,并且创建了client对象;第二步是处理阶段,从socket读取数据到输入缓冲区,然后解析并获得命令,执行命令并将返回值存储到输出缓冲区中;第三步是数据返回阶段,将返回值从输出缓冲区写到socket中,返回给客户端,最后关闭client。
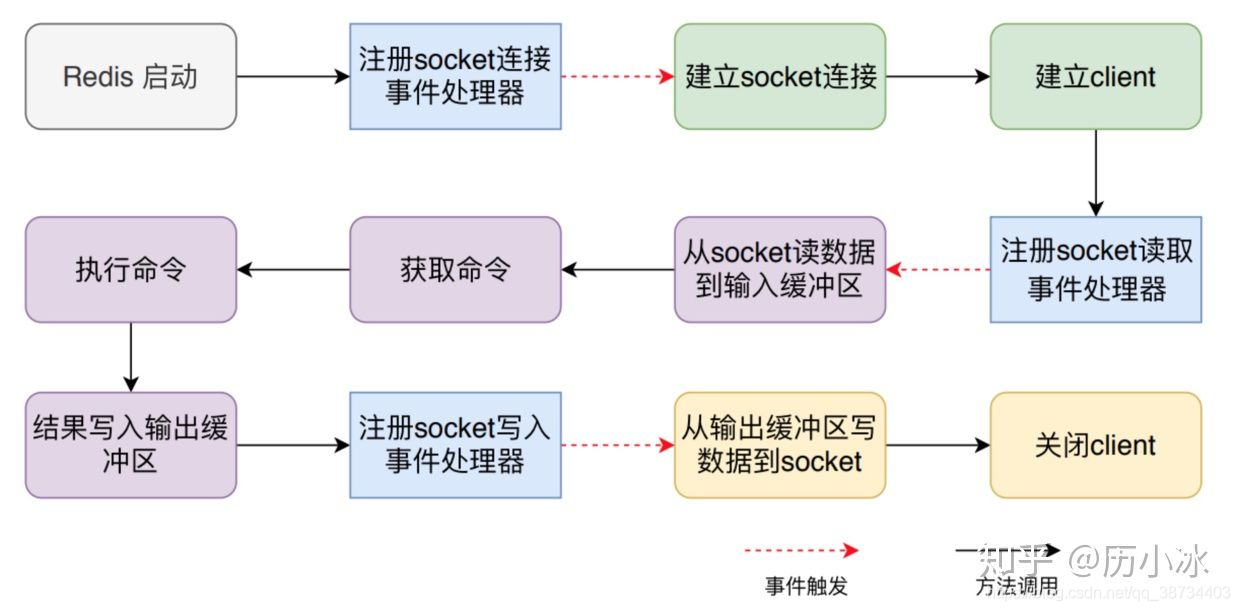
redis数据结构
- redis设计与实现
- 新版本用quicklist取代了linkedlist
- 跳表插入
存疑?

其中:embstr和raw都是由SDS动态字符串构成的。唯一区别是:raw是分配内存的时候,redisobject和 sds 各分配一块内存,而embstr是redisobject和sds在一块儿内存中。



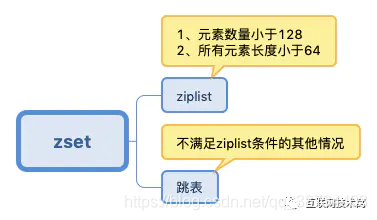
排行榜--微信步数
- 简单实现如下:
- 1 需求分析
1)排行榜是以日期为单位的,历史日期的排行榜是可以查看的
2)排行榜可能并不会显示所有好友的步数,比如我的微信有349位好友,但排行榜从来没有显示过这么多,假设最多只显示步数前200的好友
3)步数是异步更新的,所以每隔一段时间步数同步后,排行榜都会变化
4)排行榜中,好友头像和微信昵称可以理解为不变的(变动的几率小,就像热搜榜中的标题和Url),但步数和点赞数是可变的 - 2 实现思路
1) 使用Redis的zSet数据结构
2)设置key时,基于微信号和日期,比如我的微信是song,今天的日期是2021-04-01,那么key就可以设计为:StepNumberRanking:song:20210401
3)设置value时,将好友的昵称作为成员member,将好友的步数作为分值score,如下所示:
zset:StepNumberRanking:song:20210401

4)使用Redis的hash数据结构,其中key为第2步的key+第3步的成员member,value分别存储好友头像、昵称、步数、点赞数
hash:StepNumberRanking:song:20210401:yst

5)获取微信步数排行榜时,分为以下2步:
① 先查询出微信步数排行榜中的好友昵称,也就是先查询StepNumberRanking:song:20210401的值
② 根据获取到的好友昵称,查询好友步数信息,也就是再查询StepNumberRanking:song:20210401:yst的值 - 3 命令行
1)zadd
执行如下命令初始化微信步数排行榜,以上面图片中的9个好友为例,以score正序排列的,即步数从少到多排列:
ZADD StepNumberRanking:song:20210401 25452 yst 23683 zq...
2)hset
因为展示步数排行榜时,需要展示昵称、头像、步数、点赞数,所以可以借助于Redis的hash数据结构来存储,这时就要用到hmset命令:
hset StepNumberRanking:song:20210401:yst
profileUrl https://..
nickName yst
stopNumber 25452
likeNum 2
...
3)zincrby
每隔一段时间,好友的步数是会更新的,此时可以使用zincrby命令来更新好友步数,假设我们只更新步数位于前2位好友的步数,给他们的步数增加10,就可以执行以下命令:
zincrby StepNumberRanking:song:20210401 10 yst
zincrby StepNumberRanking:song:20210401 10 zq
更新完排行榜里的步数后,不要忘记执行hmset命令更新好友的步数: 25462
hset StepNumberRanking:song:20210401:yst
profileUrl https://..
nickName yst
stopNumber 25462
...
4)hincrby
当我们在步数排行榜里给好友点赞时,可以使用hincrby命令,把上图中的likeNum加1:
hincrby StepNumberRanking:song:20210401:yst likeNum 1
5)zrange
在所有的数据就绪后,剩下的就是查询了,使用ZRANGE命令获取排行榜里的好友信息: 少到多
ZRANGE StepNumberRanking:song:20210401 0 -1

6)zrevrange
ZREVRANGE命令和ZRANGE命令类似,不过是按score倒序的,刚好符合排行榜的场景。
ZREVRANGE StepNumberRanking:song:20210401 0 -1 WITHSCORES
//top5
ZREVRANGE StepNumberRanking:song:20210401 0 4 WITHSCORES
7)hgetall
获取到了排行榜里的好友信息,最后一步就是获取这些好友的步数、点赞数、头像、昵称这些信息,也就是我们之前使用hash数据结构存储的信息,此时我们可以使用HGETALL命令,如下所示:
HGETALL StepNumberRanking:song:20210401:yst

lua脚本原理
https://zhuanlan.zhihu.com/p/48337244
https://wiki.jikexueyuan.com/project/redis/lua.html
缓存
- 讲讲redis缓存?
- 缓存能够有效地加速应用的读写速度,同时也可以降低后端负载。
- 缓存的收益和成本?
-- 左侧为客户端直接调用存储层的架构,右侧为比较典型的缓存层+存储层架构;

-- 收益:
① 加速读写:因为缓存通常都是全内存的(例如Redis、Memcache),而存储层通常读写性能不够强悍(例如MySQL),通过缓存的使用可以有效地加速读写,优化用户体验。
② 降低后端负载:帮助后端减少访问量和复杂计算(例如很复杂的SQL语句),在很大程度降低了后端的负载。
-- 成本:
① 数据不一致性:缓存层和存储层的数据存在着一定时间窗口的不一致性,时间窗口跟更新策略有关。
② 代码维护成本:加入缓存后,需要同时处理缓存层和存储层的逻辑,增大了开发者维护代码的成本。
③ 运维成本:以Redis Cluster为例,加入后无形中增加了运维成本。 - 缓存的使用场景基本包含如下两种?:
① 开销大的复杂计算:以MySQL为例子,一些复杂的操作或者计算(例如大量联表操作、一些分组计算),如果不加缓存,不但无法满足高并发量,同时也会给MySQL带来巨大的负担。
② 加速请求响应:即使查询单条后端数据足够快(例如select*from table where id=),那么依然可以使用缓存,以Redis为例子,每秒可以完成数万次读写,并且提供的批量操作可以优化整个IO链的响应时间。 - 缓存的缓存更新策略的选择和使用场景?
-- 缓存中的数据通常都是有生命周期的,需要在指定时间后被删除或更新,以保证缓存空间在一个可控的范围。
1)LRU/LFU/FIFO算法剔除
► 使用场景:用于缓存使用量超过了预设的最大值时候,如何对现有的数据进行剔除。例如Redis使用maxmemory-policy这个配置作为内存最大值后对于数据的剔除策略。
► 一致性:要清理哪些数据是由具体算法决定,开发人员只能决定使用哪种算法,所以数据的一致性是最差的。
► 维护成本:算法不需要开发人员自己来实现,通常只需要配置最大maxmemory和对应的策略即可。开发人员只需要知道每种算法的含义,选择适合自己的算法即可。
2)超时剔除
► 使用场景:超时剔除通过给缓存数据设置过期时间,让其在过期时间后自动删除,例如Redis提供的expire命令。如果业务可以容忍一段时间内,缓存层数据和存储层数据不一致,那么可以为其设置过期时间。在数据过期后,再从真实数据源获取数据,重新放到缓存并设置过期时间。例如一个视频的描述信息,可以容忍几分钟内数据不一致,但是涉及交易方面的业务,后果可想而知。
► 一致性:一段时间窗口内(取决于过期时间长短)存在一致性问题,即缓存数据和真实数据源的数据不一致。
► 维护成本:维护成本不是很高,只需设置expire过期时间即可,当然前提是应用方允许这段时间可能发生的数据不一致。
3)主动更新
► 使用场景:应用方对于数据的一致性要求高,需要在真实数据更新后,立即更新缓存数据。例如可以利用消息系统或者其他方式通知缓存更新。
► 一致性:一致性最高,但如果主动更新发生了问题,那么这条数据很可能很长时间不会更新,所以建议结合超时剔除一起使用效果会更好。
► 维护成本:维护成本会比较高,开发者需要自己来完成更新,并保证更新操作的正确性。
-- 应用建议
► 低一致性业务建议配置最大内存和淘汰策略的方式使用。
► 高一致性业务可以结合使用超时剔除和主动更新,这样即使主动更新出了问题,也能保证数据过期时间后删除脏数据。
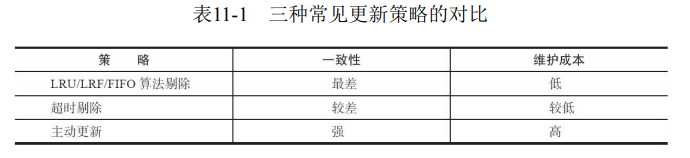
- 缓存粒度控制方法。
-- 缓存全部数据和部分数据;

- 穿透问题优化。
- 无底洞问题优化。
- 雪崩问题优化。
- 热点key重建优化。
1-穿透|击穿|雪崩
|aobing|
redis的缓存穿透、缓存击穿、缓存雪崩原因现象和解决措施? |3
redis缓存穿透与解决措施? |3 (rky
- 是什么?
指查询一个根本不存在的数据,缓存层和存储层都不会命中,通常出于容错的考虑,如果从存储层查不到数据则不写入缓存层,如图整个过程分为如下3步:
1)缓存层不命中。
2)存储层不命中,不将空结果写回缓存。
3)返回空结果。
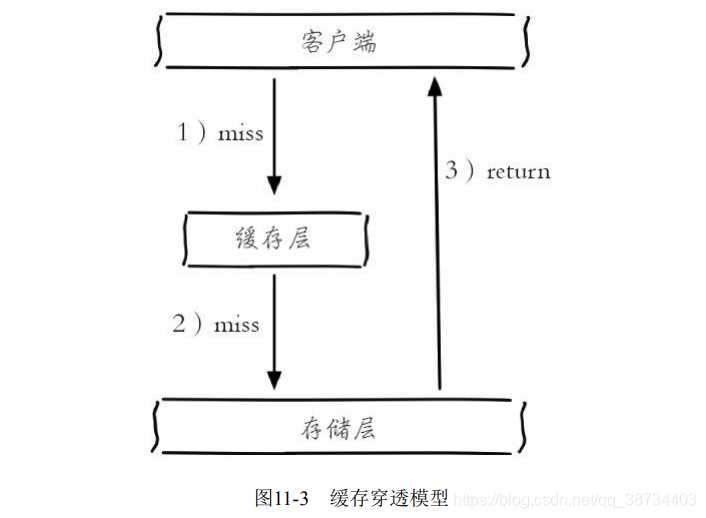
- 后果:
► 导致不存在的数据每次请求都要到存储层去查询,失去了缓存保护后端存储的意义。
► 缓存穿透问题可能会使后端存储负载加大,由于很多后端存储不具备高并发性,甚至可能造成后端存储宕掉。通常可以在程序中分别统计总调用数、缓存层命中数、存储层命中数,如果发现大量存储层空命中,可能就是出现了缓存穿透问题。 - 基本原因有两个:
► 第一,自身业务代码或者数据出现问题;
► 第二,一些恶意攻击、爬虫等造成大量空命中。 - 解决缓存穿透问题:
1)缓存空对象
如图,当第2步存储层不命中后,仍然将空对象保留到缓存层中,之后再访问这个数据将会从缓存中获取,这样就保护了后端数据源。

▷ 缓存空对象会有两个问题:
① 空值做了缓存,意味着缓存层中存了更多的键,需要更多的内存空间(如果是攻击,问题更严重),比较有效的方法是针对这类数据设置一个较短的过期时间,让其自动剔除。
② 缓存层和存储层的数据会有一段时间窗口的不一致,可能会对业务有一定影响。
例如过期时间设置为5分钟,如果此时存储层添加了这个数据,那此段时间就会出现缓存层和存储层数据的不一致,此时可以利用消息系统或者其他方式清除掉缓存层中的空对象。
▷ 缓存空对象的实现代码:
String get(String key) {// 从缓存中获取数据String cacheValue = cache.get(key);// 缓存为空if (StringUtils.isBlank(cacheValue)) {// 从存储中获取String storageValue = storage.get(key);cache.set(key, storageValue);// 如果存储数据为空,需要设置一个过期时间(300秒)if (storageValue == null) {cache.expire(key, 60 * 5);}return storageValue;} else {// 缓存非空return cacheValue;}}
2)布隆过滤器拦截
► 如图,在访问缓存层和存储层之前,将存在的key用布隆过滤器提前保存起来,做第一层拦截。

► 场景:
例如:一个推荐系统有4亿个用户id,每个小时算法工程师会根据每个用户之前历史行为计算出推荐数据放到存储层中,但是最新的用户由于没有历史行为,就会发生缓存穿透的行为,为此可以将所有推荐数据的用户做成布隆过滤器。如果布隆过滤器认为该用户id不存在,那么就不会访问存储层,在一定程度保护了存储层。
► 实现:
有关布隆过滤器的相关知识,可以参考:https://en.wikipedia.org/wiki/Bloom_filter可以利用Redis的Bitmaps实现布隆过滤器,GitHub上已经开源了类似的方案,读者可以进行参考:https://github.com/erikdubbelboer/redis-lua-scaling-bloom-filter。
► 应用场景:
适用于数据命中不高、数据相对固定、实时性低(通常是数据集较大)的应用场景,代码维护较为复杂,但是缓存空间占用少。
► 两种解决方法的对比(实际上这个问题是一个开放问题,有很多解决方法)
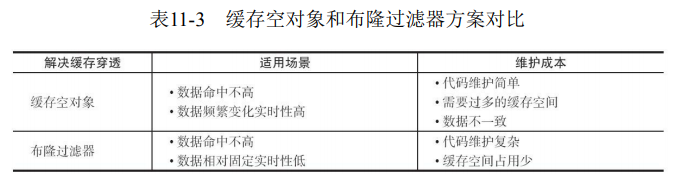
- 是什么?
redis缓存雪崩与解决措施? |3 (rky
- 是什么?
由于缓存层承载着大量请求,有效地保护了存储层,但是如果缓存层由于某些原因不能提供服务,于是所有的请求都会达到存储层,存储层的调用量会暴增,造成存储层也会级联宕机的情况。缓存雪崩的英文原意是stampeding herd(奔逃的野牛),指的是缓存层宕掉后,流量会像奔逃的野牛一样,打向后端存储。
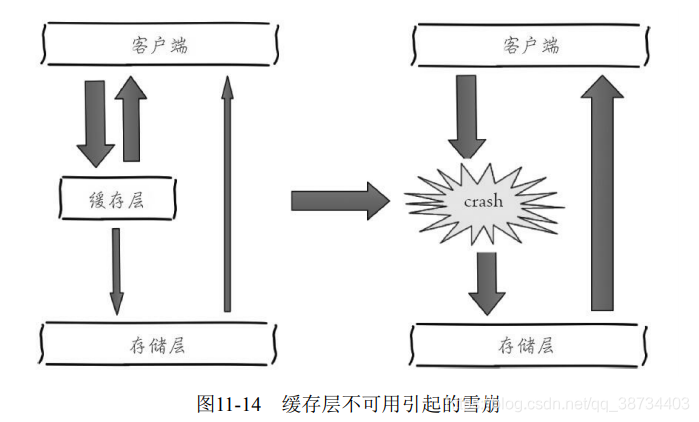
- 三个方面预防和解决缓存雪崩问题:
1)保证缓存层服务高可用性。
和飞机都有多个引擎一样,如果缓存层设计成高可用的,即使个别节点、个别机器、甚至是机房宕掉,依然可以提供服务,例如前面介绍过的Redis Sentinel和Redis Cluster都实现了高可用。
2)依赖隔离组件为后端限流并降级。
无论是缓存层还是存储层都会有出错的概率,可以将它们视同为资源。作为并发量较大的系统,假如有一个资源不可用,可能会造成线程全部阻塞(hang)在这个资源上,造成整个系统不可用。
▷ 降级机制在高并发系统中是非常普遍的:比如推荐服务中,如果个性化推荐服务不可用,可以降级补充热点数据,不至于造成前端页面是开天窗。在实际项目中,我们需要对重要的资源(例如Redis、MySQL、HBase、外部接口)都进行隔离,让每种资源都单独运行在自己的线程池中,即使个别资源出现了问题,对其他服务没有影响。但是线程池如何管理,比如如何关闭资源池、开启资源池、资源池阀值管理,这些做起来还是相当复杂的。
3)提前演练。
在项目上线前,演练缓存层宕掉后,应用以及后端的负载情况以及可能出现的问题,在此基础上做一些预案设定。
- 是什么?
见你写了个加随机数预防缓存雪崩,解释一下?
- 这里分享一个简单方案就时讲缓存失效时间分散开,比如我们可以在原有的失效时间基础上增加一个随机值,比如1-5分钟随机,这样每一个缓存的过期时间的重复率就会降低,就很难引发集体失效的事件。
https://blog.csdn.net/zeb_perfect/article/details/54135506 - 其他方案:
https://blog.csdn.net/kongtiao5/article/details/82771694
- 这里分享一个简单方案就时讲缓存失效时间分散开,比如我们可以在原有的失效时间基础上增加一个随机值,比如1-5分钟随机,这样每一个缓存的过期时间的重复率就会降低,就很难引发集体失效的事件。
redis缓存击穿(热点数据集中失效/热点key重建优化)与解决措施? |3 (rky
- 缓存+过期时间-策略:
► 优:加速数据读写、保证数据的定期更新,基本能够满足绝大部分需求。 - 问题:
如下两个问题如果同时出现,在缓存失效的瞬间,有大量线程来重建缓存,造成后端负载加大,甚至可能会让应用崩溃。
① 当前key是一个热点key(例如一个热门的娱乐新闻),并发量非常大。
② 重建缓存不能在短时间完成,可能是一个复杂计算,例如复杂的SQL、多次IO、多个依赖等。
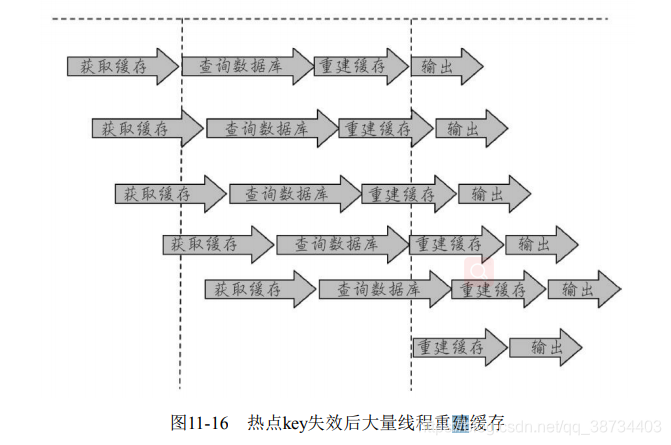
- 解决:
1)互斥锁(mutex key)
► 此方法只允许一个线程重建缓存,其他线程等待重建缓存的线程执行完,重新从缓存获取数据即可,整个过程如图。
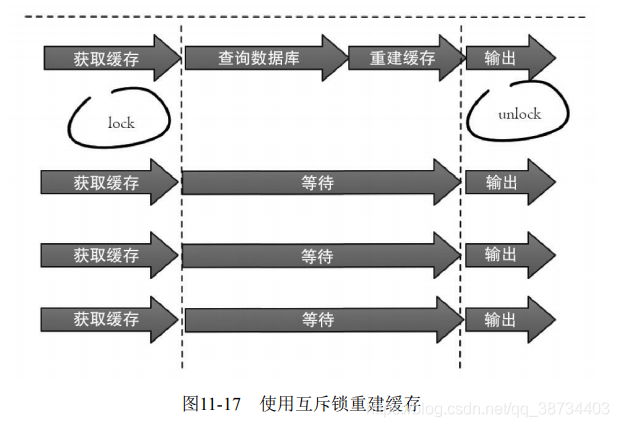
► 下面代码使用Redis的setnx命令实现上述功能:
String get(String key) {// 从Redis中获取数据String value = redis.get(key);// 如果value为空,则开始重构缓存if (value == null) {// 只允许一个线程重构缓存,使用nx,并设置过期时间exString mutexKey = "mutext:key:" + key;if (redis.set(mutexKey, "1", "ex 180", "nx")) {// 从数据源获取数据value = db.get(key);// 回写Redis,并设置过期时间redis.setex(key, timeout, value);// 删除key_mutexredis.delete(mutexKey);}// 其他线程休息50毫秒后重试else {Thread.sleep(50);get(key);}}return value;}
1)从Redis获取数据,如果值不为空,则直接返回值;否则执行下面的2.1)和2.2)步骤。
2.1)如果set(nx和ex)结果为true,说明此时没有其他线程重建缓存,那么当前线程执行缓存构建逻辑。
2.2)如果set(nx和ex)结果为false,说明此时已经有其他线程正在执行构建缓存的工作,那么当前线程将休息指定时间(例如这里是50毫秒,取决于构建缓存的速度)后,重新执行函数,直到获取到数据。
2)永远不过期
► “永远不过期”包含两层意思:
-- 从缓存层面来看,确实没有设置过期时间,所以不会出现热点key过期后产生的问题,也就是“物理”不过期。
-- 从功能层面来看,为每个value设置一个逻辑过期时间,当发现超过逻辑过期时间后,会使用单独的线程去构建缓存。
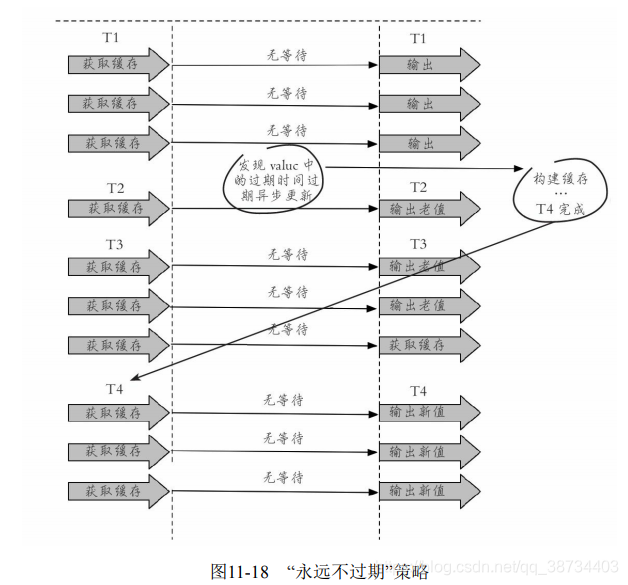
► 从实战看,此方法有效杜绝了热点key产生的问题,但唯一不足的就是重构缓存期间,会出现数据不一致的情况,这取决于应用方是否容忍这种不一致。
► 代码实现:String get(final String key) {V v = redis.get(key);String value = v.getValue();// 逻辑过期时间long logicTimeout = v.getLogicTimeout();// 如果逻辑过期时间小于当前时间,开始后台构建if (v.logicTimeout <= System.currentTimeMillis()) {String mutexKey = "mutex:key:" + key;if (redis.set(mutexKey, "1", "ex 180", "nx")) {// 重构缓存threadPool.execute(new Runnable() {public void run() {String dbValue = db.get(key);redis.set(key, (dbvalue,newLogicTimeout));redis.delete(mutexKey);}});}}return value;}
- 缓存指标对比解决方案?
► 作为一个并发量较大的应用,在使用缓存时有三个目标:
第一,加快用户访问速度,提高用户体验。
第二,降低后端负载,减少潜在的风险,保证系统平稳。
第三,保证数据“尽可能”及时更新。下面将按照这三个维度对上述两种解决方案进行分析。
► 互斥锁(mutex key):这种方案思路比较简单,但是存在一定的隐患,如果构建缓存过程出现问题或者时间较长,可能会存在死锁和线程池阻塞的风险,但是这种方法能够较好地降低后端存储负载,并在一致性上做得比较好。 - “永远不过期”:这种方案由于没有设置真正的过期时间,实际上已经不存在热点key产生的一系列危害,但是会存在数据不一致的情况,同时代码复杂度会增大。
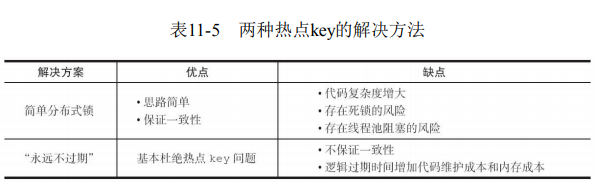
- 缓存+过期时间-策略:
为什么选择Redis作为缓存?
-- 收益:
① 加速读写:因为缓存通常都是全内存的(例如Redis、Memcache),而存储层通常读写性能不够强悍(例如MySQL),通过缓存的使用可以有效地加速读写,优化用户体验。
② 降低后端负载:帮助后端减少访问量和复杂计算(例如很复杂的SQL语句),在很大程度降低了后端的负载。缓存一致性相关问题?
- 问题:
1)如何保证mysql与redis的双写一致性。
(最终一致性和强一致性)
如果对数据有强一致性要求,不能放缓存。
2)怎么保证redis与Mysql的数据一致性(秒杀预热数据的一致性,就解释了不需要一致性,只保证Mysql库存正确即可之类的)
3)怎么实现redis,mysql数据一致性,为什么不采取更新数据库,再更新缓存?这样做有什么不好?怎么改进呢?等等
4)项目中的缓存不一致怎么解决的
-- 不一致原因:先操作缓存,在写数据库成功之前,如果有读请求发生,可能导致旧数据入缓存,引发数据不一致。
-- 解决:串行化 - 解决:
https://www.jianshu.com/p/c72ba33ea49e
- 问题:
2-项目和场景题
2.1 场景题
设计一个缓存商品的方案,什么时候保存商品到缓存,什么时候删除缓存的商品?
如何设计一个秒杀系统?
① 怎么测试秒杀
② Redis怎么库存预热,RabbitMQ怎么进行队列削峰如何解决一个高并发场景呢?
(答数据库主从复制读写分离,分库分表,服务器划分不通服务或者负载均衡,加消息队列和缓存)
2.2 项目
Redis项目中用来做什么 ?
你项目如果用redis改进,怎么改?
缓存与数据库的双写一致性
- 双写一致_yl|多种不一致及解决
1 经典的缓存+数据库读写的模式,Cache Aside Pattern
--读的时候,先读缓存,缓存没有的话,就读数据库,然后取出数据后放入缓存,同时返回响应。
--更新的时候,先更新数据库,然后再删除缓存。
为什么是删除缓存,而不是更新缓存?

--数据不一致问题:故先更新数据库,再删缓存
1)请求A进行写操作,删除缓存2)请求B查询发现缓存不存在3)请求B去数据库查询得到旧值4)请求B将旧值写入缓存5)请求A将新值写入数据库2 高并发的优化
--问题:A查询,B更新->脏数据
1)缓存刚好失效(2)请求A查询数据库,得一个旧值(3)请求B将新值写入数据库(4)请求B删除缓存(5)请求A将查到的旧值写入缓存
--优化:异步延时删除策略/缓存设置有效时间
我的理解:更新数据时,发送到一个队列中。读取数据的时候,如果发现数据不在缓存中,重新执行“读取数据+更新缓存”的操作,也发送到同一个队列中。串行执行队列中的。过滤重复的更新请求。
内存管理
基础知识点:
- 内存相关配置
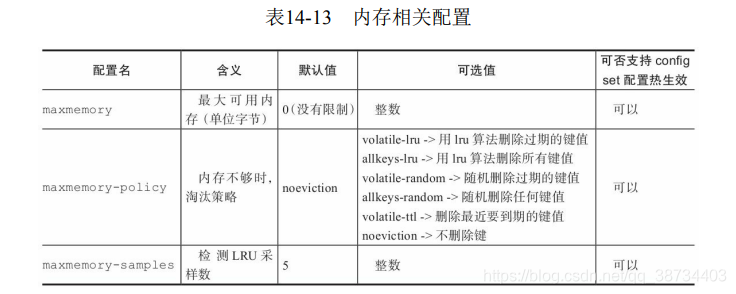
- Redis内存管理:
主要通过控制内存上限和回收策略实现;
1)Redis使用maxmemory参数限制最大可用内存。限制内存的目的主要有:
·用于缓存场景,当超出内存上限maxmemory时使用LRU等删除策略释放空间。
·防止所用内存超过服务器物理内存。
2)Redis的内存回收机制主要体现在以下两个方面:
·删除到达过期时间的键对象。
·内存使用达到maxmemory上限时触发内存溢出控制策略。
- 内存相关配置
redis缓存回收机制?
因为C语言并不具备自动内存回收功能,所以Redis在自己的对象系统中构建了一个引用计数(reference counting)技术实现的内存回收机制,通过这一机制,程序可以通过跟踪对象的引用计数信息,在适当的时候自动释放对象并进行内存回收。
每个对象的引用计数信息由redisObject结构的refcount属性记录:typedef struct redisObject {// ...// 引用计数int refcount;// ...} robj;
对象的引用计数信息会随着对象的使用状态而不断变化:
·在创建一个新对象时,引用计数的值会被初始化为1;
·当对象被一个新程序使用时,它的引用计数值会被增一;
·当对象不再被一个程序使用时,它的引用计数值会被减一;
·当对象的引用计数值变为0时,对象所占用的内存会被释放。生命周期
对象的整个生命周期可以划分为创建对象、操作对象、释放对象三个阶段。作为例子,以下代码展示了一个字符串对象从创建到释放的整个过程(其他不同类型的对象也会经历类似的过程):// 创建一个字符串对象s,对象的引用计数为1robj *s = createStringObject(...)//对象s执行各种操作...// 将对象s 的引用计数减一,使得对象的引用计数变为0// 导致对象s 被释放decrRefCount(s)
API
修改对象引用计数的API,这些API分别用于增加、减少、重置对象的引用计数。
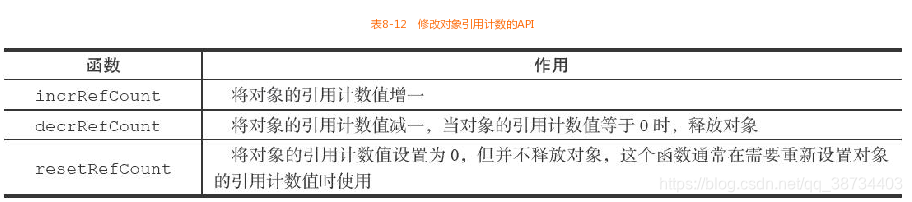
什么是内存碎片,产生的原因?
- 内存分配器为了更好地管理和重复利用内存,分配内存策略一般采用固定范围的内存块进行分配。
-- 例如jemalloc在64位系统中将内存空间划分为:小、大、巨大三个范围。每个范围内又划分为多个小的内存块单位。比如当保存5KB对象时jemalloc可能会采用8KB的块存储,而剩下的3KB空间变为了内存碎片不能再分配给其他对象存储。是jemalloc针对碎片化问题专门做了优化,一般不会存在过度碎片化的问题; - 原因:以下场景容易出现高内存碎片问题:
-- 频繁做更新操作,例如频繁对已存在的键执行append、setrange等更新操作。
-- 大量过期键删除,键对象过期删除后,释放的空间无法得到充分利用,导致碎片率上升。 - 常见的解决:
1)数据对齐:在条件允许的情况下尽量做数据对齐,比如数据尽量采用数字类型或者固定长度字符串等,但是这要视具体的业务而定,有些场景无法做到。
2)安全重启:重启节点可以做到内存碎片重新整理,因此可以利用高可用架构,如Sentinel或Cluster,将碎片率过高的主节点转换为从节点,进行安全重启。
- 内存分配器为了更好地管理和重复利用内存,分配内存策略一般采用固定范围的内存块进行分配。
redis数据达到多少是阈值?
- Redis使用maxmemory参数限制最大可用内存。
- 注意:
maxmemory限制的是Redis实际使用的内存量,也就是used_memory统计项对应的内存。由于内存碎片率的存在,实际消耗的内存可能会比maxmemory设置的更大,实际使用时要小心这部分内存溢出。
redis最大内存设置了多少?
- 一般推荐Redis设置内存为最大物理内存的四分之三
http://linux.zhizuobiao.com/linux-19051400034/
- 一般推荐Redis设置内存为最大物理内存的四分之三
redis为什么要设置过期时间?
过期时间是怎么设置的?
- 通过EXPIRE key seconds命令来设置数据的过期时间
- Redis有四个不同的命令可以用于设置键的生存时间(键可以存在多久)或过期时间(键什么时候会被删除):
·EXPIRE命令用于将键key的生存时间设置为ttl秒。
·PEXPIRE命令用于将键key的生存时间设置为ttl毫秒。
·EXPIREAT命令用于将键key的过期时间设置为timestamp所指定的秒数时间戳。
·PEXPIREAT命令用于将键key的过期时间设置为timestamp所指定的毫秒数时间戳。 - 虽然有多种不同单位和不同形式的设置命令,但实际上EXPIRE、PEXPIRE、EXPIREAT三个命令都是使用PEXPIREAT命令来实现的:无论客户端执行的是以上四个命令中的哪一个,经过转换之后,最终的执行效果都和执行PEXPIREAT命令一样。
redis key 的过期键删除策略?
- Redis所有的键都可以设置过期属性,内部保存在过期字典中。由于进程内保存大量的键,维护每个键精准的过期删除机制会导致消耗大量的CPU,对于单线程的Redis来说成本过高,实现过期键的内存回收。
- 三种不同的删除策略:
·定时删除:在设置键的过期时间的同时,创建一个定时器(timer),让定时器在键的过期时间来临时,立即执行对键的删除操作。
·惰性删除:放任键过期不管,但是每次从键空间中获取键时,都检查取得的键是否过期,如果过期的话,就删除该键;如果没有过期,就返回该键。
·定期删除:每隔一段时间,程序就对数据库进行一次检查,删除里面的过期键。至于要删除多少过期键,以及要检查多少个数据库,则由算法决定。 - 在这三种策略中,第一种和第三种为主动删除策略,而第二种则为被动删除策略。
定期删除怎么实现的,是开启一个新进程还是停止工作去删除?
- 定期删除策略的实现
过期键的定期删除策略由redis.c/activeExpireCycle函数实现,每当Redis的服务器周期性操作redis.c/serverCron函数执行时,activeExpireCycle函数就会被调用,它在规定的时间内,分多次遍历服务器中的各个数据库,从数据库的expires字典中随机检查一部分键的过期时间,并删除其中的过期键。 整个过程可以用伪代码描述如下:
# 默认每次检查的数据库数量DEFAULT_DB_NUMBERS = 16# 默认每个数据库检查的键数量DEFAULT_KEY_NUMBERS = 20# 全局变量,记录检查进度current_db = 0def activeExpireCycle():# 初始化要检查的数据库数量# 如果服务器的数据库数量比DEFAULT_DB_NUMBERS要小,那么以服务器的数据库数量为准if server.dbnum < DEFAULT_DB_NUMBERS:db_numbers = server.dbnumelse:db_numbers = DEFAULT_DB_NUMBERS# 遍历各个数据库for i in range(db_numbers):# 如果current_db的值等于服务器的数据库数量,这表示检查程序已经遍历了服务器的所有数据库一次# 将current_db重置为0,开始新的一轮遍历if current_db == server.dbnum:current_db = 0# 获取当前要处理的数据库redisDb = server.db[current_db]# 将数据库索引增1,指向下一个要处理的数据库current_db += 1# 检查数据库键for j in range(DEFAULT_KEY_NUMBERS):# 如果数据库中没有一个键带有过期时间,那么跳过这个数据库if redisDb.expires.size() == 0: break# 随机获取一个带有过期时间的键key_with_ttl = redisDb.expires.get_random_key()# 检查键是否过期,如果过期就删除它if is_expired(key_with_ttl):delete_key(key_with_ttl)# 已达到时间上限,停止处理if reach_time_limit(): return
activeExpireCycle函数的工作模式可以总结如下:
· 函数每次运行时,都从一定数量的数据库中取出一定数量的随机键进行检查,并删除其中的过期键。
· 全局变量current_db会记录当前activeExpireCycle函数检查的进度,并在下一次activeExpireCycle函数调用时,接着上一次的进度进行处理。比如说,如果当前activeExpireCycle函数在遍历10号数据库时返回了,那么下次activeExpireCycle函数执行时,将从11号数据库开始查找并删除过期键。
· 随着activeExpireCycle函数的不断执行,服务器中的所有数据库都会被检查一遍,这时函数将current_db变量重置为0,然后再次开始新一轮的检查工作。
- 定期删除策略的实现
redis内存满了会怎么样
- 当Redis所用内存达到maxmemory上限时会触发相应的溢出控制策略/淘汰策略。具体策略受maxmemory-policy参数控制,Redis支持6种策略;默认值noeviction。
redis使用哪种淘汰策略?
- noeviction
Redis缓存(内存)淘汰策略 |2
- Redis的内存淘汰策略是指在Redis的用于缓存的内存不足时,怎么处理需要新写入且需要申请额外空间的数据。
1)全局的键空间选择性移除
noeviction:当内存不足以容纳新写入数据时,新写入操作会报错。
allkeys-lru:当内存不足以容纳新写入数据时,在键空间中,移除最近最少使用的key。(这个是最常用的)
allkeys-random:当内存不足以容纳新写入数据时,在键空间中,随机移除某个key。
2)设置过期时间的键空间选择性移除
volatile-lru:当内存不足以容纳新写入数据时,在设置了过期时间的键空间中,移除最近最少使用的key。
volatile-random:当内存不足以容纳新写入数据时,在设置了过期时间的键空间中,随机移除某个key。
volatile-ttl:当内存不足以容纳新写入数据时,在设置了过期时间的键空间中,有更早过期时间的key优先移除。 - 总结
Redis的内存淘汰策略的选取并不会影响过期的key的处理。内存淘汰策略用于处理内存不足时的需要申请额外空间的数据;过期策略用于处理过期的缓存数据。
规则名称 规则说明 volatile-lru 使用LRU算法删除一个键(只对设置了生存时间的键) allkeys-lru 使用LRU算法删除一个键 volatile-random 随机删除一个键(只对设置了生存时间的键) allkeys-random 随机删除一个键 volatile-ttl 删除生存时间最近的一个键 noeviction 不删除键,只返回错误 - LRU算法,least RecentlyUsed,最近最少使用算法。
- Redis的内存淘汰策略是指在Redis的用于缓存的内存不足时,怎么处理需要新写入且需要申请额外空间的数据。
Java语言,实现一下LRU缓存?
redis中lru咋实现的?
- 实现思路:首先实现一个双向链表,每次有一个key被访问之后,就把被访问的key放到链表的头部。当缓存不够时,直接从尾部逐个摘除。
- redis中LRU的思路:即如果一个key经常被访问,那么该key的idle time应该是最小的
- lfu的思路:如果能够记录一个key被访问的次数,那么经常被访问的key最有可能再次被访问到。
https://segmentfault.com/a/1190000017555834
哨兵
作者:ce、欢笙
链接:https://www.nowcoder.com/discuss/566337?source_id=discuss_experience_nctrack&channel=-1
定时任务的功能分别如下:通过向主从节点发送info命令获取最新的主从结构;通过发布订阅功能获取其他哨兵节点的信息;通过向其他节点发送ping命令进行心跳检测,判断是否下线。
在从节点中选择新的主节点:选择的原则是,首先过滤掉不健康的从节点;然后选择优先级最高的从节点(由slave-priority指定);如果优先级无法区分,则选择复制偏移量最大的从节点;如果仍无法区分,则选择runid最小的从节点。
8-redis分布式锁
应用场景:
1.互联网秒杀
2.抢优惠卷
客户端api:
Jedis
RedisTemplate:Springboot封装好的模板
例子:redis库存 stock-1操作
问题:
多线程并发
解决1:synchronized(this)
适合单体架构(1个tomcat示例运行)
集群:
集群、分布式(多个tomcat部署)
-每个tomcat jvm进程
synchronized 在jvm内部
-整体并发:
2个请求 ngnix 分发到2个tomcat 2个代码段同时操作
-更改端口号 启动程序 可创建多个tomcat实例
-Jmeter 模拟压测的工具
解决2:redis分布式锁-初级理解,问题很多
setnx k v:.setIfAbsent(k,v)
k不存在,设置v;k存在,v不变
完毕后删除k
问题1:
-异常:try finally,finally中删除k
-死锁:try finally中代码,在执行中服务挂了(重启或kill),k未释放,其他请求不到
问题2:死锁:
method:设置超时时间 expire
问题3:
setnx后,未expire成功
method:
原子操作:setIfAbsent()同时设置setnx、expire
高并发场景:
问题4:
-场景:线程A执行任务15',k过期时间10’,->执行过程中,10'后锁已过期;
线程B需8',获取锁,再进行5',锁被A释放;还有C、D...;
=>锁永久失效(k、v是一样的)
-method:
-删除对应k问题:生成唯一标识uuid:原v+“id”,释放前判断是否是自己的v
-程序没执行完,k过期问题:分线程执行定时器timer,k续命,设置过期时间的1/3,如过期时间10',则10/3=3,timer 3'执行一次(注:分布式锁,无论几个tomcat,多线程只有一个timer执行)
redisson框架:redisson.org
-上述思想的实现
-与Jedis类似,redis Java的一个客户端,更适合分布式
问题:redis主从结构
-主从复制时,主挂了,选举,从变成主,新主还没同步k(超高并发下)
m:redlock、zookeeper(推荐,内部也会保证一致性)
-性能优化:分段式
为什么选择redis而不是zookeeper?
-redis性能更高
-zk准确性高
- 图:Redisson分布式锁实现原理
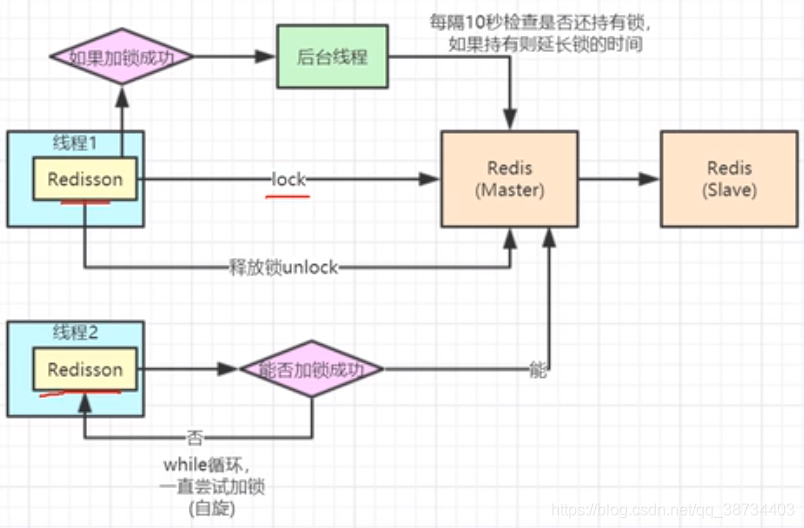
skynet分布式锁代码
- 1 实现
/*** 不可重入分布式锁的实现 */@Slf4j@Componentpublic class RedisDistributeLock implements DistributeLock {@Autowiredprivate RedisTemplate<String, String> redisTemplate;/**默认key过期时间,单位秒* 5min*/private int defaultExpiration = 300;/** * 非阻塞请求锁 */@Overridepublic boolean tryLock(String key, String req) {return tryLock(key, req, defaultExpiration);}/** * 非阻塞请求锁 -默认过期时间*/@Overridepublic boolean tryLock(String key, String req, int expiration) {Boolean state = redisTemplate.opsForValue().setIfAbsent(key, req, expiration, TimeUnit.SECONDS);if (state != null && state) {log.info("持有分布式锁{}, req:{}:", key, req);return true;}return false;}/*** 阻塞请求锁* @param timeout 阻塞时长*/@Overridepublic boolean tryLock(String key, String req, int expiration, int timeout) {long start = System.currentTimeMillis();//毫秒int period = 10;for (; ; ) {boolean lock = tryLock(key, req, expiration);if (lock) return true;if (System.currentTimeMillis() - start >= (timeout * 1000)) {break;}try {TimeUnit.MILLISECONDS.sleep(period);} catch (InterruptedException e) {return false;}}return false;}/** * 删除分布式锁 */@Overridepublic boolean unlock(String key, String req) {//lua脚本String script = "if redis.call('get', KEYS[1]) == ARGV[1] then return redis.call('del',KEYS[1]) else return 0 end";RedisScript<Boolean> redisScript = new DefaultRedisScript<>(script, Boolean.class);Boolean execute = redisTemplate.execute(redisScript, Lists.newArrayList(key), req);boolean status = execute == null ? false : execute;if (status) {log.debug("删除分布式键{}成功:{}", key, req);}return status;}}
- 2 使用
@Scheduled(cron = "0 0/5 * * * ?")public void LogServiceUserAttrTrackSchedule() {String key = "ssssss";String req = UUID.randomUUID().toString();try {int expiration = 30 * 60;boolean holdLock = this.distributeLock.tryLock(key, req, expiration);if (holdLock) {// 业务逻辑// ....}} finally {distributeLock.unlock(key, req);}}
分布式锁分析
- redis锁|脚本解释
- 1 场景
--集群、分布式(多个tomcat部署),每个tomcat为一个jvm进程
如,整体并发:2个请求 通过ngnix 分发到2个tomcat 2个代码段同时操作
--保证分布式环境下,不同节点的线程同步执行,互斥访问共享资源。 - 2 解决问题
分布式系统中,多台机器上部署了多个服务,当客户端一个用户发起一个数据插入请求时,那么那多台机器上的多个服务可能进行并发插入操作,导致数据重复插入。而分布式锁机制就是为了解决类似这类问题,保证多个服务之间互斥的访问共享资源,如果一个服务抢占了分布式锁,其他服务没获取到锁,就不进行后续操作。 - 3 分布式锁的特点
互斥性: 同一时刻只能有一个线程持有锁
可重入性: 同一节点上的同一个线程如果获取了锁之后能够再次获取锁
锁超时:和J.U.C中的锁一样支持锁超时,防止死锁
高性能和高可用: 加锁和解锁需要高效,同时也需要保证高可用,防止分布式锁失效
具备阻塞和非阻塞性:能够及时从阻塞状态中被唤醒 - 4 分布式锁的实现方式
一般有以下几种方式:
基于数据库
基于Redis
基于zookeeper - 5 原子性
- 1)set和expire原子性
--原:setIfAbsent即setnx,set每次val会更改
redisTemplate.opsForValue().setIfAbsent(key, uuid);
redisTemplate.expire(key, expiration, TimeUnit.SECONDS);
--问题:
当执行完第1个语句中断,第2个没执行;
--方法1:(skynet采用)
redisTemplate.opsForValue().setIfAbsent(key, uuid, expiration, TimeUnit.SECONDS);
--方法2:lua脚本
scripts = "if redis.call('setnx',KEYS[1],ARGV[1]) == 1 then redis.call('expire',KEYS[1],ARGV[2]) return 1 else return 0 end"; 2)value要具有唯一性
--用UUID来做,设置随机字符串保证唯一性
--原因:
假如value不是随机字符串,而是一个固定值:
1.客户端1获取锁成功
2.客户端1在某个操作上阻塞了太长时间
3.设置的key过期了,锁自动释放了
4.客户端2获取到了对应同一个资源的锁
5.客户端1从阻塞中恢复过来,因为value值一样,所以执行释放锁操作时就会释放掉客户端2持有的锁,这样就会造成问题6 释放锁
--解锁时,我们需要判断锁是否是自己的
--lua脚本保持原子性
String script = "if redis.call('get',KEYS[1]) == ARGV[1] then return redis.call('del',KEYS[1]) else return 0 end";
redis锁的缺陷
- redis锁问题
- 1 问题
集群、主从架构的主从异步复制导致的 redis 分布式锁的最大缺陷:在 redis master 实例宕机的时候,可能导致多个客户端同时完成加锁。 - 2 具体
对某个 redis master 实例,写入了 myLock 这种锁 key 的 value,此时会异步复制给对应的 master slave 实例。但这个过程中一旦发生 redis m aster 宕机,主备切换,redis slave 变为了 redis master。
接着就会导致,客户端 2 来尝试加锁的时候,而新master还没复制完,客户端 2在新的 redis master 上完成了加锁,而客户端 1 也以为自己成功加了锁。此时就会导致多个客户端对一个分布式锁完成了加锁。这时系统在业务语义上一定会出现问题,导致各种脏数据的产生。
5-os&net
1-操作系统
内存管理
算了...
https://www.cnblogs.com/CareySon/archive/2012/04/25/2470063.html
https://www.zhihu.com/question/50796850
https://zhuanlan.zhihu.com/p/87514615
* 概述
--内存概念不存在时。程序直接访问和操作的都是物理内存。也不存在多进程。
--内存:
为了解决直接操作内存带来的各种问题,引入的地址空间(Address Space),这允许每个进程拥有自己的地址。
还需要硬件上存在两个寄存器,基址寄存器(base register)和界址寄存器(limit register),第一个寄存器保存进程的开始地址,第二个寄存器保存上界,防止内存溢出。
- 虚拟内存
--概念:
虚拟内存是现代操作系统普遍使用的一种技术。
--思想:
每个进程有用独立的逻辑地址空间,内存被分为大小相等的多个块,称为页(Page).每个页都是一段连续的地址。对于进程来看,逻辑上貌似有很多内存空间,其中一部分对应物理内存上的一块(称为页框,通常页和页框大小相等),还有一些没加载在内存中的对应在硬盘上。

--图上的问题:
①虚拟内存实际上可以比物理内存大。
当访问虚拟内存时,会访问MMU(内存管理单元)去匹配对应的物理地址(比如图5的0,1,2),而如果虚拟内存的页并不存在于物理内存中(如图5的3,4),会产生缺页中断,从磁盘中取得缺的页放入内存,如果内存已满,还会根据某种算法将磁盘中的页换出。
②虚拟内存和物理内存的匹配是通过页表实现,页表存在MMU中,页表中每个项通常为32位,既4byte,除了存储虚拟地址和页框地址之外,还会存储一些标志位,比如是否缺页,是否修改过,写保护等。可以把MMU想象成一个接收虚拟地址项返回物理地址的方法。
③ 二级页表
页表中每个条目是4字节,现在的32位操作系统虚拟地址空间会是2的32次方,即使每页分为4K,也需要2的20次方*4字节=4M的空间,为每个进程建立一个4M的页表并不明智。因此在页表的概念上进行推广,产生二级页表,二级页表每个对应4M的虚拟地址,而一级页表去索引这些二级页表,因此32位的系统需要1024个二级页表,虽然页表条目没有减少,但内存中可以仅仅存放需要使用的二级页表和一级页表,大大减少了内存的使用。
进程间通讯
- 方式
- 是否可靠?
--管道/匿名管道(Pipes) :用于具有亲缘关系的父子进程间或者兄弟进程之间的通信。
--有名管道(Names Pipes) : 匿名管道由于没有名字,只能用于亲缘关系的进程间通信。为了克服这个缺点,提出了有名管道。有名管道严格遵循先进先出(first in first out)。有名管道以磁盘文件的方式存在,可以实现本机任意两个进程通信。
--信号(Signal) :信号是一种比较复杂的通信方式,用于通知接收进程某个事件已经发生;
--消息队列(Message Queuing):消息队列是消息的链表,具有特定的格式,存放在内存中并由消息队列标识符标识。管道和消息队列的通信数据都是先进先出的原则。与管道(无名管道:只存在于内存中的文件;命名管道:存在于实际的磁盘介质或者文件系统)不同的是消息队列存放在内核中,只有在内核重启(即,操作系统重启)或者显示地删除一个消息队列时,该消息队列才会被真正的删除。消息队列可以实现消息的随机查询,消息不一定要以先进先出的次序读取,也可以按消息的类型读取.比 FIFO 更有优势。消息队列克服了信号承载信息量少,管道只能承载无格式字 节流以及缓冲区大小受限等缺。
--信号量(Semaphores):信号量是一个计数器,用于多进程对共享数据的访问,信号量的意图在于进程间同步。这种通信方式主要用于解决与同步相关的问题并避免竞争条件。
--共享内存(Shared memory):使得多个进程可以访问同一块内存空间,不同进程可以及时看到对方进程中对共享内存中数据的更新。这种方式需要依靠某种同步操作,如互斥锁和信号量等。可以说这是最有用的进程间通信方式。
--套接字(Sockets) : 此方法主要用于在客户端和服务器之间通过网络进行通信。套接字是支持 TCP/IP 的网络通信的基本操作单元,可以看做是不同主机之间的进程进行双向通信的端点,简单的说就是通信的两方的一种约定,用套接字中的相关函数来完成通信过程。
2-网络
1.UDP|TCP
UDP是什么?
- 是什么:
• UDP(User Datagram Protocol用户数据报协议)
• 传输层协议
• 无连接的数据报协议
• 不能提供数据报分组,组装和不能对数据报进行排序
• 主要用于不要求分组顺序到达的传输中,分组传输顺序的检查和排序有应用层完成。
• 提供面向事务的简单不可靠传递服务。
• UDP协议使用端口分别运行在同一台设备上的多个应用程序
• 功能:为了在给定的主句上能识别多个目的的地址,同时允许多个应用程序在同一台主句上工作并能够独立地进行数据包的发送和接受,设计用户数据报协议UDP - 应用场景:
UDP当对网络通讯质量要求不高的时候,要求网络通讯速度能尽量的快,这时就可以使用UDP。比如,日常生活中,常见使用UDP协议的应用如下:
-- QQ语音、QQ视频、TFTP……
- 是什么:
UDP怎么实现可靠传输? |2
1)添加seq/ack机制,确保数据发送到对端
2)添加发送和接收缓冲区,主要是用户超时重传。
3)添加超时重传机制。
https://www.jianshu.com/p/6c73a4585ebatcp参考:
https://blog.csdn.net/qq_38950316/article/details/81087809
https://blog.csdn.net/qzcsu/article/details/72861891
https://www.cnblogs.com/jainszhang/p/10641728.htmlTCP是什么?应用场景,udp怎么实现tcp功能
- 是什么?
• 传输控制协议(TCP)是一种面向连接的,可靠的,基于字节流的传输通信协议。
• 传输层协议
• 原因:应用层需要可靠的连接,但是IP层没有这样的流机制
• 面向连接,即在客户端和服务器之间发送数据之间,必须先建立连接
• 位于应用层和IP层之间
• 连接需要建立三次握手、四次挥手断开连接
• 传输数据时可靠的 - 应用场景
TCP当对网络通讯质量有要求的时候,比如:整个数据要准确无误的传递给对方,这往往用于一些要求可靠的应用,比如HTTP、HTTPS、FTP等传输文件的协议,POP、SMTP等邮件传输的协议。
在日常生活中,常见使用TCP协议的应用如下:
-- 浏览器,用的HTTP
-- FlashFXP,用的FTP
-- Outlook,用的POP、SMTP
-- Putty,用的Telnet、SSH
-- QQ文件传输…………
- 是什么?
tcp三次握手? |5
- 必读:https://blog.csdn.net/qq_38950316/article/details/81087809
- 三次握手过程理解:
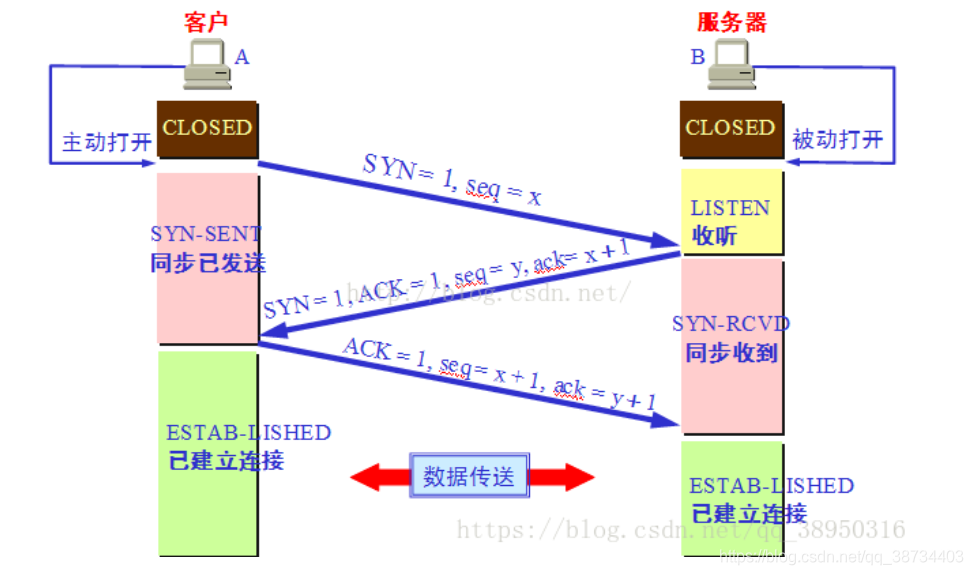
- 第一次握手:
客户端将TCP报文标志位SYN置为1,随机产生一个序号值seq=x,保存在TCP首部的序列号(Sequence Number)字段里,指明客户端打算连接的服务器的端口,并将该数据包发送给服务器端,发送完毕后,客户端进入SYN_SENT状态,等待服务器端确认。 - 第二次握手:
服务器端收到数据包后由标志位SYN=1知道客户端请求建立连接,服务器端将TCP报文标志位SYN和ACK都置为1,ack=x+1,随机产生一个序号值seq=y,并将该数据包发送给客户端以确认连接请求,服务器端进入SYN_RCVD状态。 - 第三次握手:
客户端收到确认后,检查ack是否为x+1,ACK是否为1,如果正确则将标志位ACK置为1,ack=y+1,并将该数据包发送给服务器端,服务器端检查ack是否为y+1,ACK是否为1,如果正确则连接建立成功,客户端和服务器端进入ESTABLISHED状态,完成三次握手,随后客户端与服务器端之间可以开始传输数据了。

https://blog.csdn.net/a519640026/article/details/104448480
tcp四次挥手?以及客户端/服务端分别发送消息后的状态? |4
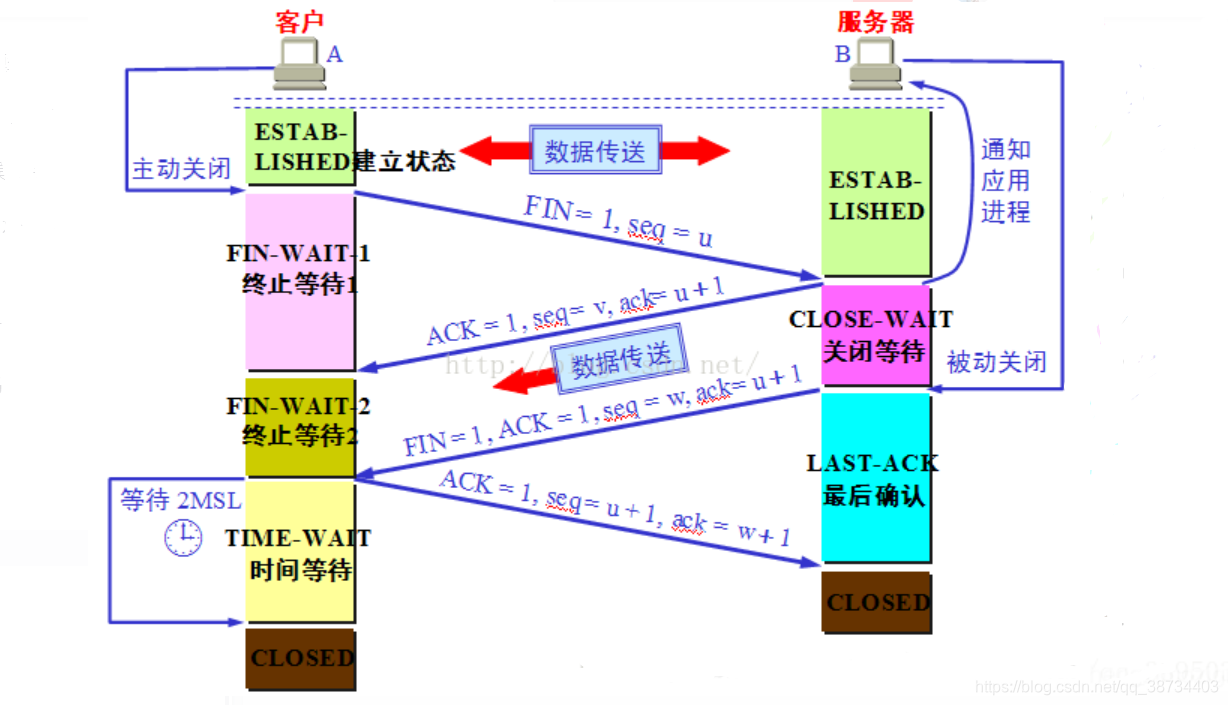
- 四次挥手过程
第一次挥手:客户端发出释放FIN=1,自己序列号seq=u,进入FIN-WAIT-1状态
第二次挥手:服务器收到客户端的后,发出ACK=1确认标志和客户端的确认号ack=u+1,自己的序列号seq=v,进入CLOSE-WAIT状态
第三次挥手:客户端收到服务器确认结果后,进入FIN-WAIT-2状态。此时服务器发送释放FIN=1信号,确认标志ACK=1,确认序号ack=u+1,自己序号seq=w,服务器进入LAST-ACK(最后确认态)
第四次挥手:客户端收到回复后,发送确认ACK=1,ack=w+1,自己的seq=u+1,客户端进入TIME-WAIT(时间等待)。客户端经过2个最长报文段寿命后,客户端CLOSE;服务器收到确认后,立刻进入CLOSE状态。
- 四次挥手过程
为什么要三次握手,四次挥手,两次不行么
- 三次握手的原因 :第三次握手是为了防止失效的连接请求到达服务器,让服务器错误打开连接。
- 四次挥手:客户端发送了FIN连接释放报文之后,服务器收到了这个报文,就进入了 CLOSE-WAIT状态。这个状态是为了让服务器端发送还未传送完毕的数据,传送完毕之后,服务器会发送 FIN 连接释放报文。。
为什么客户端最后还要等待2MSL tcp的timewait
客户端接收到服务器端的 FIN 报文后进入此状态,此时并不是直接进入 CLOSED 状态,还需要等待一个时间计时器设置的时间 2MSL。这么做有两个理由:- 确保最后一个确认报文能够到达。如果 B 没收到 A 发送来的确认报文,那么就会重新发送连接释放请求报文,A 等待一段时间就是为了处理这种情况的发生。
- 等待一段时间是为了让本连接持续时间内所产生的所有报文都从网络中消失,使得下一个新的连接不会出现旧的连接请求报文。
https://blog.csdn.net/TJtulong/article/details/89858678
TCP 如何保证可靠传输,讲了一下拥塞控制、滑动窗口/tcp可靠性/为什么是可靠的
1)可靠传输:通过序列号、检验和、确认应答信号、重发控制、连接管理、窗口控制、流量控制、拥塞控制实现可靠性。(重传机制?)
2)TCP 滑动窗口
窗口允许发送方在收到ACK之前连续发送多个分组,窗口的大小就是指无需等待确认应答而可以继续发送数据的最大值。
https://blog.csdn.net/TJtulong/article/details/89858678TCP协议怎么保证传输可靠性,如果收到了重复数据怎么办?
TCP流量控制?
tcp拥塞控制? |3
tcp拥塞控制怎么实现
- 如果网络出现拥塞,分组将会丢失,此时发送方会继续重传,从而导致网络拥塞程度更高。因此当出现拥塞时,应当控制发送方的速率。
- TCP 主要通过四个算法来进行拥塞控制:慢开始、拥塞避免、快重传、快恢复。
https://blog.csdn.net/TJtulong/article/details/89858678
TCP用的是ipoc还是什么?
- TCP头有什么信息?
- TCP往IP层的包添加了哪些东西
- 弱网情况下TCP性能较差,为什么。
- 讲一下TCP和UDP区别? |3
- 为什么选用TCP而不用UDP
- 查找出目前正在运行的TCP/UDP服务?
netstat -atunlp - 网络拥塞,最快方式下载一个视频文件的方法
TCP粘包
https://blog.csdn.net/nigar_/article/details/104237780
https加密过程


输入网址执行过程
零拷贝?
- 零拷贝_ab√
- 1 DMA概念
DMA 技术,也就是直接内存访问(Direct Memory Access) 技术。
--概念:
简单理解,即在进行 I/O 设备和内存的数据传输的时候,数据搬运的工作全部交给 DMA 控制器,而 CPU 不再参与任何与数据搬运相关的事情,这样 CPU 就可以去处理别的事务。 - 2 传统文件传输
--传统 I/O 的工作方式是,数据读取和写入是从用户空间到内核空间来回复制,而内核空间的数据是通过操作系统层面的 I/O 接口从磁盘读取或写入。
--一般需要系统调用如下代码
read(file, tmp_buf, len);
write(socket, tmp_buf, len); - 零拷贝实现
--零拷贝技术实现的方式通常有 2 种:
mmap + write
sendfile
--传统的数据copy(文件到文件、client到server等)涉及到四次用户态内核态切换、四次copy。四次copy中,两次在用户态和内核态间copy需要CPU参与、两次在内核态与IO设备间copy为DMA方式不需要CPU参与。零拷贝避免了用户态和内核态间的copy、减少了两次用户态内核态间的切换。
--通过一次系统调用(sendfile 方法)合并了磁盘读取与网络发送两个操作,降低了上下文切换次数。另外,拷贝数据都是发生在内核中的,天然就降低了数据拷贝的次数。
BIO、NIO、IO多路复用、AIO
- 概念
- 多路复用select poll epoll
https://www.jianshu.com/p/397449cadc9a
https://www.jianshu.com/p/dfd940e7fca2
3-分布式
- 1 分布式系统概念
--分布式系统(distributed system)是建立在网络之上的软件系统。正是因为软件的特性,所以分布式系统具有高度的内聚性和透明性。
--在一个分布式系统中,一组独立的计算机展现给用户的是一个统一的整体,就好像是一个系统似的。系统拥有多种通用的物理和逻辑资源,可以动态的分配任务,分散的物理和逻辑资源通过计算机网络实现信息交换。系统中存在一个以全局的方式管理计算机资源的分布式操作系统
分布式理论
- ACID 是数据库事务完整性的理论,CAP 是分布式系统设计理论,BASE 是 CAP 理论中 AP 方案的延伸。
- 分布式理论
- CAP
CAP 定理(CAP theorem)指出对于一个分布式系统来说,当设计读写操作时,只能能同时满足以下三点中的两个:PA/PC
Consistency(一致性)、Availability(可用性)、Partition Tolerance(分区容错性) - BASE
BASE 是 Basically Available(基本可用) 、Soft-state(软状态) 和 Eventually Consistent(最终一致性) 三个短语的缩写。BASE 理论是对 CAP 中一致性和可用性权衡的结果,其来源于对大规模互联网系统分布式实践的总结,是基于CAP定理逐步演化而来的,它大大降低了我们对系统的要求。 - 理论 算法 内容有补充
分布式算法--一致性算法
分布式事务
2PC 和 3PC 都是数据库层面的,而 TCC 是业务层面的分布式事务
1 概念
-- 分布式事务顾名思义就是要在分布式系统中实现事务,它其实是由多个本地事务组合而成。2 常见的分布式事务
-- 2PC、3PC、TCC、本地消息表、消息事务、最大努力通知3 2PC
-- 2PC(Two-phase commit protocol),中文叫二阶段提交。
-- 二阶段提交是一种强一致性设计,2PC 引入一个事务协调者的角色来协调管理各参与者(也可称之为各本地资源)的提交和回滚,二阶段分别指的是准备(投票)和提交两个阶段。
-- 2PC的问题:同步阻塞协议
1>P失败:分布式事务执行失败
参与者返回失败,那么协调者就会向所有参与者发送回滚事务的请求。
有协调者有超时机制:超时后就会判断事务失败,向所有参与者发送回滚命令。
2>C失败
① 回滚事务操作:不断重试,阻塞P
② 提交事务操作:只能重试
-- 协调者故障分析
协调者是一个单点,存在单点故障问题。
-- 协调者故障,通过选举得到新协调者
每个参与者自身的状态只有自己和协调者知道
数据不一致问题。
-- 总结:
--- 2PC 是一种尽量保证强一致性的分布式事务,因此它是同步阻塞的,而同步阻塞就导致长久的资源锁定问题,总体而言效率低,并且存在单点故障问题,在极端条件下存在数据不一致的风险。
--- 当然具体的实现可以变形,而且 2PC 也有变种,例如 Tree 2PC、Dynamic 2PC。
--- 2PC 适用于数据库层面的分布式事务场景4 3PC
-- 概念:
3PC 的出现是为了解决 2PC 的一些问题,相比于 2PC 它在参与者中也引入了超时机制,并且新增了一个阶段使得参与者可以利用这一个阶段统一各自的状态。
-- 三个阶段:
准备阶段、预提交阶段和提交阶段,CanCommit、PreCommit 和 DoCommit。
-- 事务失败:
不管哪一个阶段有参与者返回失败都会宣布事务失败,这和 2PC 是一样的(当然到最后的提交阶段和 2PC 一样只要是提交请求就只能不断重试)。
-- 准备阶段:
不会直接执行事务,而是会先去询问此时的参与者是否有条件接这个事务,因此不会一来就干活直接锁资源,使得在某些资源不可用的情况下所有参与者都阻塞着。
-- 预提交阶段:
作用:统一状态。
像一道栅栏,表明在预提交阶段前所有参与者其实还未都回应,在预处理阶段表明所有参与者都已经回应了
但多引入一个阶段也多一个交互,因此性能会差一些,而且绝大部分的情况下资源应该都是可用的,这样等于每次明知可用执行还得询问一次。
-- 参与者超时:
如果是等待提交命令超时,那么参与者就会提交事务了,,如果是等待预提交命令超时,那该干啥就干啥了。
问题:超时机制也会带来数据不一致的问题,比如在等待提交命令时候超时了,参与者默认执行的是提交事务操作,但是有可能执行的是回滚操作,这样一来数据就不一致了。5 TCC
-- TCC 是业务层面的分布式事务,如发送短信,上传一张图片或者发送一条短信等
-- 概念:TCC 指的是Try - Confirm - Cancel。
Try 指的是预留,即资源的预留和锁定,注意是预留。
Confirm 指的是确认操作,这一步其实就是真正的执行了。
Cancel 指的是撤销操作,可以理解为把预留阶段的动作撤销了。
-- 操作:
比如说一个事务要执行A、B、C三个操作,那么先对三个操作执行预留动作。如果都预留成功了那么就执行确认操作,如果有一个预留失败那就都执行撤销动作。
-- 事务管理者:
TCC模型还有个事务管理者的角色,用来记录TCC全局事务状态并提交或者回滚事务。
-- 注意:
TCC 对业务的侵入较大和业务紧耦合,需要根据特定的场景和业务逻辑来设计相应的操作。
撤销和确认操作的执行可能需要重试,因此还需要保证操作的幂等。
-- TCC可以跨数据库、跨不同的业务系统来实现事务。6 本地消息表
-- 概念:
利用了 各系统本地的事务来实现分布式事务。
顾名思义就是会有一张存放本地消息的表,一般都是放在数据库中,然后在执行业务的时候 将业务的执行和将消息放入消息表中的操作放在同一个事务中,这样就能保证消息放入本地表中业务肯定是执行成功的。
--实现的是最终一致性,容忍了数据暂时不一致的情况。- 7 消息事务
- 8 最大努力通知
6-Spring
Spring概念
1 概念
轻量级的开源的J2EE框架。它是一个容器框架,用来装javabean(java对象),中间层框架(万能胶)
可以起一个连接作用,比如说把Struts和hibernate粘合在一起运用,可以让我们的企业开发更快、更简洁
Spring是一个轻量级的控制反转(IoC)和面向切面(AOP)的容器框架
--从大小与开销两方面而言Spring都是轻量级的。
--通过控制反转(IoC)的技术达到松耦合的目的
--提供了面向切面编程的丰富支持,允许通过分离应用的业务逻辑与系统级服务进行内聚性的
开发
--包含并管理应用对象(Bean)的配置和生命周期,这个意义上是一个容器。
--将简单的组件配置、组合成为复杂的应用,这个意义上是一个框架。




spring 和 springboot的关系
Bean的定义方式
- 1 概念
Bean其实就是包装了的Object,无论是控制反转还是依赖注入,它们的主语都是object,而bean就是由第三方包装好了的object。 - 不管JavaBean、SpringBean,Bean都是一个对象。
1) JavaBean
--所有属性被private修饰,并提供set、get方法访问,称为JavaBean
--规则:private+get/set

2)SpringBean
--规则:Spring生成的对象->Spring Bean(对类的属性没有要求)
--添加依赖包
--使用包中的类:
通过xml以及spring的类加载的对象

2 Bean的定义方式
4种:xml()、@Bean、@Component、BeanDefinition
① bean在Spring的xml中定义Bean Spring读取类中的构造方法建造的对象
② @Bean在一个方法上 方法中new出来的一个对象
③ @Component注解[还有其他注解]放在类上注入一个Bean
④ 前3都是声明式的方式来注册bean的,而它们的基础都是基于BeanDefinition的方法(编程式)来实现注册Bean的。
--一个Bean的描述、定义/*** 通过BeanDefinition 的编程式方式来定义一个Bean*/AnnotationConfigApplicationContext applicationContext = new AnnotationConfigApplicationContext();AbstractBeanDefinition beanDefinition = BeanDefinitionBuilder.genericBeanDefinition().getBeanDefinition();// 定义一个beanbeanDefinition.setBeanClass(user.class);// 添加到spring容器中,注册到ApplicationContextapplicationContext.registerBeanDefinition("user",beanDefinition);
- 3 其他Bean的定义方式
① FactoryBean类可以间接的定义一个bean
② Supplier
Spring的Ioc
- Ioc注入流程【重要】
- 容器概念、控制反转、依赖注入
- 1 容器概念
1)是什么
-- IoC容器就像是一个工厂一样,当我们需要创建一个对象的时候,只需要配置好配置文件/注解即可,完全不用考虑对象是如何被创建出来的。
--通俗点讲,因为项目中每次创建对象是很麻烦的,所以我们使用 Spring IoC 容器来管理这些对象,需要的时候你就直接用,不用管它是怎么来的、什么时候要销毁,只管用就好了。
2)结构
--使用 ApplicationContext,它是BeanFactory的子类,更好的补充并实现了 BeanFactory 的。
BeanFactory 简单粗暴,可以理解为 HashMap:
Key - bean name
Value - bean object

3)具体存储
Ioc容器:实际上就是个map(key,value),里面存的是各种对象(在xml里配置的bean节点、@repository、@service、@controller、@component),在项目启动的时候会读取配置文件里面的bean节点,根据全限定类名使用反射创建对象放到map里、扫描到打上上述注解的类还是通过反射创建对象放到map里。
这个时候map里就有各种对象了,接下来我们在代码里需要用到里面的对象时,再通过DI注入(autowired、resource等注解,xml里bean节点内的ref属性,项目启动的时候会读取xml节点ref属性根据id注入,也会扫描这些注解,根据type类型或id注入;id就是对象名)。
4)作用
--容器负责创建、配置和管理bean,也就是它管理着 bean 的生命,控制着 bean 的依赖注入。 - 2 控制反转
1)概念
--控制反转就是把创建和管理bean的过程转移给了第三方。而这个第三方,就是 Spring IoC Container,对于 IoC 来说,最重要的就是容器。
2)为什么引入
--没有引入IOC容器之前,对象A依赖于对象B,那么对象A在初始化或者运行到某一点的时候,自己必须主动去创建对象B或者使用已经创建的对象B(tips:如new)。无论是创建还是使用对象B,控制权都在自己手上。
--引入IOC容器之后,对象A与对象B之间失去了直接联系,当对象A运行到需要对象B的时候,IOC容器会主动创建一个对象B注入到对象A需要的地方。
--通过前后的对比,不难看出来:对象A获得依赖对象B的过程,由主动行为变为了被动行为,控制权颠倒过来了,这就是“控制反转”这个名称的由来。
--全部对象的控制权全部上缴给“第三方”IOC容器,所以,IOC容器成了整个系统的关键核心,它起到了一种类似“粘合剂”的作用,把系统中的所有对象粘合在一起发挥作用,如果没有这个“粘合剂”,对象与对象之间会彼此失去联系,这就是有人把IOC容器比喻成“粘合剂”的由来。 3 依赖注入
--“获得依赖对象的过程被反转了”。控制被反转之后,获得依赖对象的过程由自身管理变为了由IOC容器主动注入。依赖注入是实现IOC的方法,就是由IOC容器在运行期间,动态地将某种依赖关系注入到对象之中。3)深入理解
Spring 时代我们一般通过 XML 文件来配置 Bean,后来开发人员觉得 XML 文件来配置不太好,于是SpringBoot注解配置就慢慢开始流行起来。

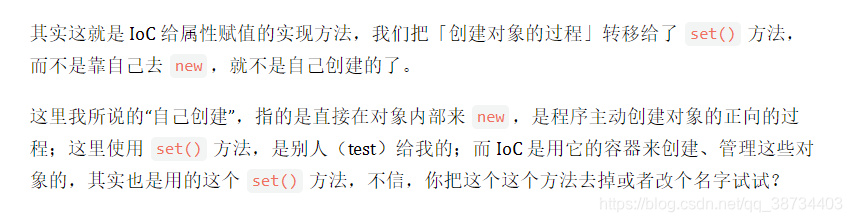
Spring有哪些容器
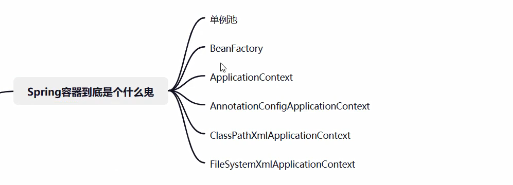
- 1 单例、单例池
1)单例Bean
--概念:Spring容器只能有一个User类型的Bean

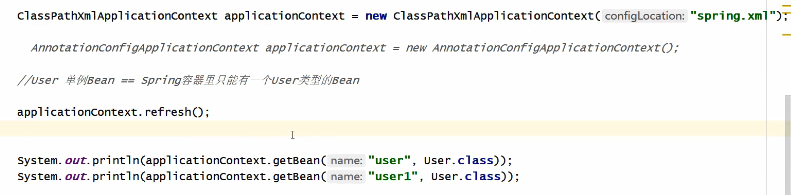
输出:没有问题

2) 单例池-Spring容器
--单例(默认) 原型(多例,getBean每次拿到都不同)
--单例池:目的 每次user1获取到的数据相同(第1次,存起来,第二次,从单例池获得)
内部使用ConcurrentHashMap 变量名singletonObject beanName(key:String-user1) Object(value-User.class)
非懒加载的单例Bean--spring启动时就把Bean创建好,扔到单例池,getBean直接去单例池取得返回



- 2 BeanFactory
是一个接口,bean工厂-->生产bean
--可以使用Spring中的BeanFactory实现一个Bean对象:
--beanFactory可以注册一个BeanDefinition也可以直接注册一个对象;即,声明一个bean,再放入beanFactory,再使用getBean时,可以获取到;
--BeanFactory可以看作是一个容器,装的是BeanDefinition/对象;
(注:单例池,就是一个map,属于Beanfactory的一个属性)


3 ApplicationContext
1)ApplicationContext接口
--获取资源、发布事件、国际化
如ClassPathXmlApplicationContext继承了ApplicationContext接口public interface ApplicationContext extends EnvironmentCapable, ListableBeanFactory, HierarchicalBeanFactory, MessageSource, ApplicationEventPublisher, ResourcePatternResolver {...
继承了beanFactory
public interface ListableBeanFactory extends BeanFactory {...public interface HierarchicalBeanFactory extends BeanFactory {...
--ApplicationContext分类角度:
可刷新、不可刷新
Spring配置的展现形式 xml,注解
2)实现类
AnnotationConfigApplicationContext (注解)
ClassPathXmlApplicationContext(xml)
FileSystemXmlApplicationContext(xml)
--区别:
ClassPathXmlApplicationContext的xml相对的是classPath的路径 如,spring.xml
FileSystemXmlApplicationContext的xml文件相对的是工程的路径 如,/src/main/resources/spring.xml
--注解:一种写法


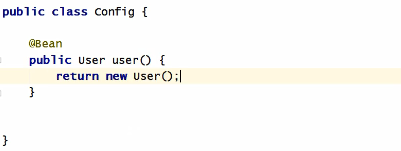
可刷新、不可刷新
AnnotationConfigApplicationContext (不可刷新)
ClassPathXmlApplicationContext(可刷新 有点类似于热部署)
BeanFactory和ApplicationContext的区别
- 是什么&作用?
- 1 ApplicationContext是BeanFactory的子接口
- 2 ApplicationContext提供了更完整的功能:
① 继承MessageSource,因此支持国际化。getMessage() 国际化,如中英文
② 统一的资源文件访问方式。getResource()
③ 提供在监听器中注册bean的事件。
④ 同时加载多个配置文件。
⑤ 载入多个(有继承关系)上下文,使得每一个上下文都专注于一个特定的层次,比如应用的web层。
--BeanFactroy采用的是延迟加载形式来注入Bean的,即只有在使用到某个Bean时(调用getBean()),才对该Bean进行加载实例化。这样,我们就不能发现一些存在的Spring的配置问题。如果Bean的某一个属性没有注入,BeanFacotry加载后,直至第一次使用调用getBean方法才会抛出异常。
--ApplicationContext,它是在容器启动时,一次性创建了所有的Bean。这样,在容器启动时,我们就可以发现Spring中存在的配置错误,这样有利于检查所依赖属性是否注入。
ApplicationContext启动后预载入所有的单实例Bean,通过预载入单实例bean,确保当你需要的时候,你就不用等待,因为它们已经创建好了。
--相对于基本的BeanFactory,ApplicationContext唯一的不足是占用内存空间。当应用程序配置Bean较多时,程序启动较慢。
--BeanFactory通常以编程的方式被创建,ApplicationContext还能以声明的方式创建,如使用ContextLoader。
--BeanFactory和ApplicationContext都支持BeanPostProcessor、BeanFactoryPostProcessor的使用,但两者之间的区别是:BeanFactory需要手动注册,而ApplicationContext则是自动注册。
BeanFactory和FactoryBean区别
区别:BeanFactory是个Factory,也就是IOC容器或对象工厂,FactoryBean是个Bean。在Spring中,所有的Bean都是由BeanFactory(也就是IOC容器)来进行管理的。但对FactoryBean而言,这个Bean不是简单的Bean,而是一个能生产或者修饰对象生成的工厂Bean,它的实现与设计模式中的工厂模式和修饰器模式类似
spring的bean依赖注入方式
spring-03
--IoC 是设计思想,DI 是具体的实现方式;
IoC 是理论,DI 是实践;
--概念
依赖注入(Dependency Injection,DI)。
依赖 : 指Bean对象的创建依赖于容器 . Bean对象的依赖资源 .
注入 : 指Bean对象所依赖的资源 , 由容器来设置和装配 .
--3种注入方式
① 构造器注入(上面已讲)
② Set方式注入【重点】
③ 扩展方式注入1)构造器构造
1)类

new User()输出:
User 的无参构造!
2)注册bean

测试:

输出:getBean的时候对象已经创建

2 有参构造:

三种构造:

2)Set方式注入【重点】
1)完整包括:set、get和以下


2)注入



3)扩展方式注入

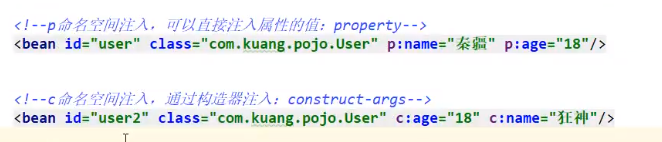
Bean的自动装配
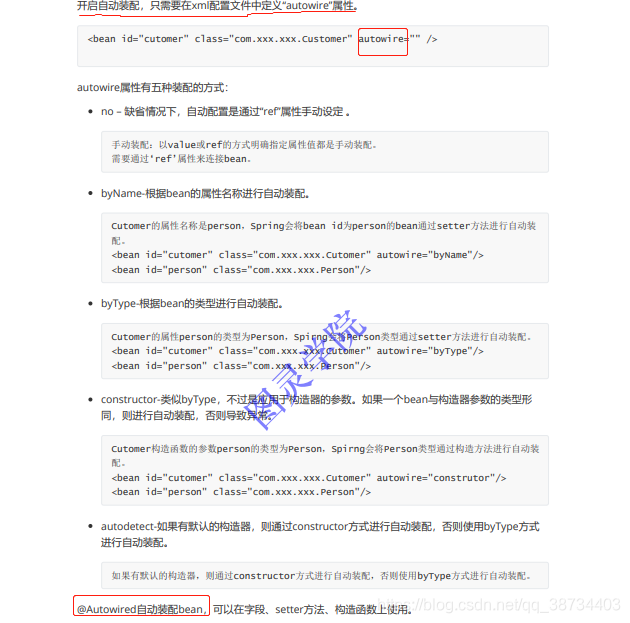
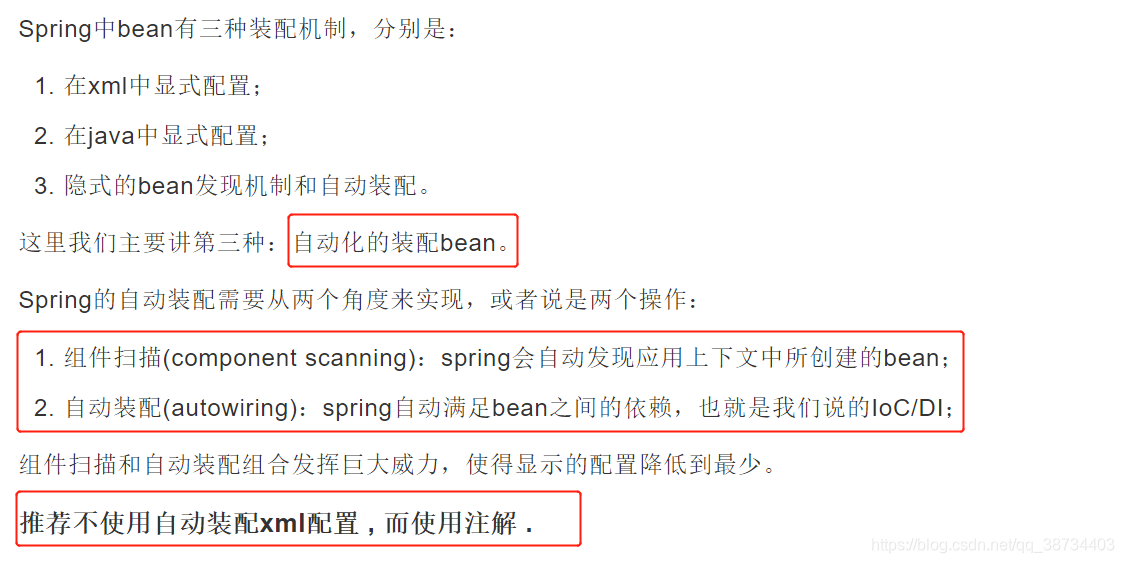
1 xml配置

1)数据:一个人有两个宠物


2)自动装配
重复装配


输出:
miao~
wang~
2)注解实现自动装配
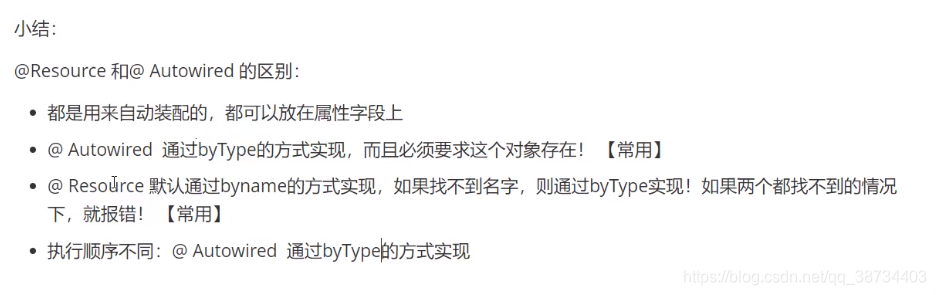
1 spring的注解
@Autowired和@Qualifier


1)配置

2)使用:可以忽略set方法

坑:

坑:

@Qualifier

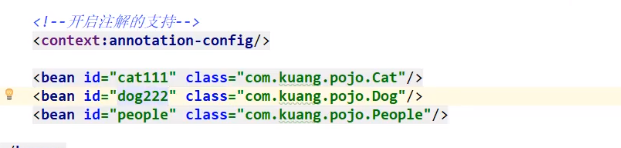
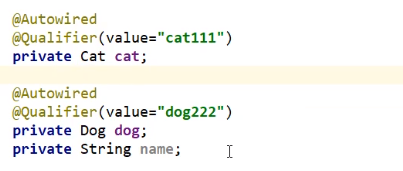
- 2 jdk的注解
@Resource
先通过名字查找,找不到使用类型查找,两个都失败才会报错

不加(name=“cat2”),名字找不到cat,类型找不到,有两个重复
Bean的作用域
- 在Spring中,那些组成应用程序的主体及由Spring IoC容器所管理的对象,被称之为bean。简单地讲,bean就是由IoC容器初始化、装配及管理的对象 .
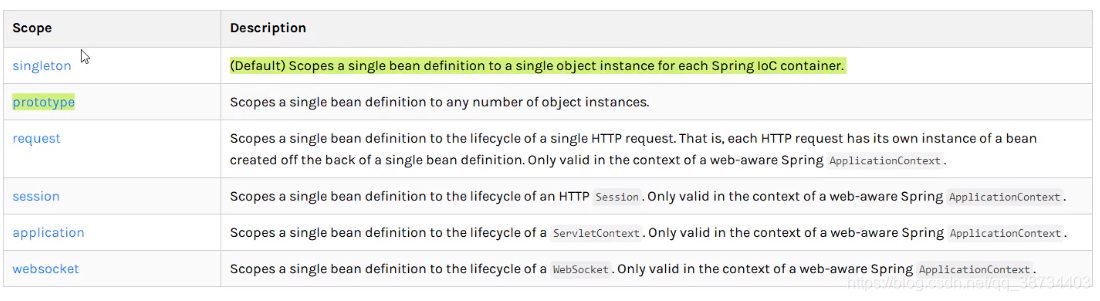
- Singleton(默认)
- prototype 原型
- request
request:bean被定义为在每个HTTP请求中创建一个单例对象,也就是说在单个请求中都会复用这一个单例对象。
- Session
session:与request范围类似,确保每个session中有一个bean的实例,在session过期后,bean会随之失效
- application:bean被定义为在ServletContext的生命周期中复用一个单例对象。
- websocket:bean被定义为在websocket的生命周期中复用一个单例对象。
- global-session:全局作用域,global-session和Portlet应用相关。当你的应用部署在Portlet容器中工作时,它包含很多portlet。如果你想要声明让所有的portlet共用全局的存储变量的话,那么这全局变量需要存储在global-session中。全局作用域与Servlet中的session作用域效果相同。
Spring的AOP
原理
3.spring的两个特性IOC和AOP?
6.spring的IOC和Aop介绍一下?
(说了反射、工厂模式和动态代理,之前看过一点源码,说的比较详细,包括每步调了什么方法等)
4.Spring的AOP自调用问题。
7.aop 你怎么使用的aop
实现方式
- 1 什么是AOP
AOP(Aspect Oriented Programming)意为:面向切面编程,通过预编译方式和运行期动态代理实现程序功能的统一维护的一种技术。AOP是OOP的延续,是软件开发中的一个热点,也是Spring框架中的一个重要内容,是函数式编程的一种衍生范型。利用AOP可以对业务逻辑的各个部分进行隔离,从而使得业务逻辑各部分之间的耦合度降低,提高程序的可重用性,同时提高了开发的效率。
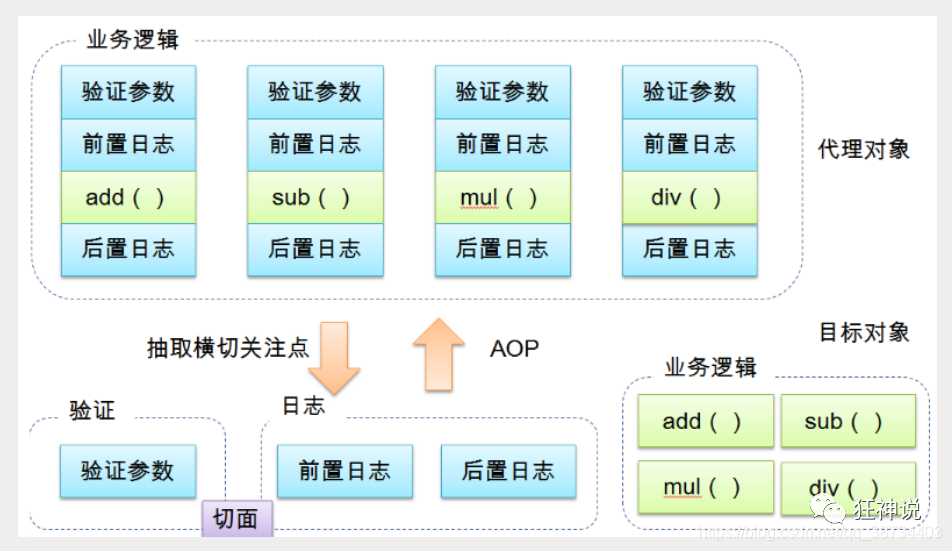
- 2 Aop在Spring中的作用
提供声明式事务;允许用户自定义切面
--以下名词需要了解下:
横切关注点:跨越应用程序多个模块的方法或功能。即是,与我们业务逻辑无关的,但是我们需要关注的部分,就是横切关注点。如日志 , 安全 , 缓存 , 事务等等 ....
切面(ASPECT):横切关注点 被模块化 的特殊对象。即,它是一个类。
通知(Advice):切面必须要完成的工作。即,它是类中的一个方法。
目标(Target):被通知对象。
代理(Proxy):向目标对象应用通知之后创建的对象。
切入点(PointCut):切面通知 执行的 “地点”的定义。
连接点(JointPoint):与切入点匹配的执行点。
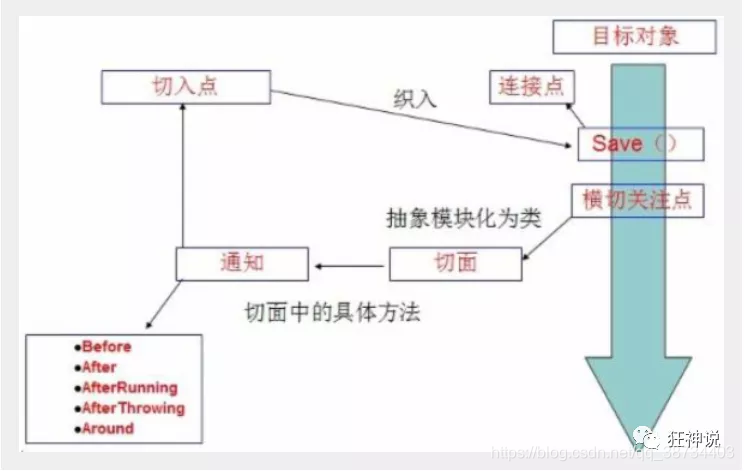
- SpringAOP中,通过Advice定义横切逻辑,Spring中支持5种类型的Advice:
即 Aop 在 不改变原有代码的情况下 , 去增加新的功能 .

3 使用Spring实现Aop
【重点】使用AOP织入,需要导入一个依赖包!<!-- https://mvnrepository.com/artifact/org.aspectj/aspectjweaver --><dependency><groupId>org.aspectj</groupId><artifactId>aspectjweaver</artifactId><version>1.9.4</version></dependency>
实现一:第一种方式:通过 Spring API 实现
Aop的重要性 : 很重要 . 一定要理解其中的思路 , 主要是思想的理解这一块 .
Spring的Aop就是将公共的业务 (日志 , 安全等) 和领域业务结合起来 , 当执行领域业务时 , 将会把公共业务加进来 . 实现公共业务的重复利用 . 领域业务更纯粹 , 程序猿专注领域业务 , 其本质还是动态代理 .
1)首先编写我们的业务接口和实现类// 增删改查接口public interface UserService {public void add();public void delete();public void update();public void search();}// 实现类public class UserServiceImpl implements UserService{@Overridepublic void add() {System.out.println("增加用户");}@Overridepublic void delete() {System.out.println("删除用户");}@Overridepublic void update() {System.out.println("更新用户");}@Overridepublic void search() {System.out.println("查询用户");}}
2)然后去写我们的增强类 , 我们编写两个 , 一个前置增强 一个后置增强
//前置增强public class Log implements MethodBeforeAdvice {//method : 要执行的目标对象的方法//objects : 被调用的方法的参数//Object : 目标对象@Overridepublic void before(Method method, Object[] objects, Object o) throws Throwable {System.out.println( o.getClass().getName() + "的" + method.getName() + "方法被执行了");}}//后置增强public class AfterLog implements AfterReturningAdvice {//returnValue 返回值//method被调用的方法//args 被调用的方法的对象的参数//target 被调用的目标对象@Overridepublic void afterReturning(Object returnValue, Method method, Object[] args, Object target) throws Throwable {System.out.println("执行了" + target.getClass().getName()+"的"+method.getName()+"方法,"+"返回值:"+returnValue);}}
3)最后去spring的文件中注册 , 并实现aop切入实现 , 注意导入约束 .
<?xml version="1.0" encoding="UTF-8"?><beans xmlns="http://www.springframework.org/schema/beans"xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"xmlns:aop="http://www.springframework.org/schema/aop"xsi:schemaLocation="http://www.springframework.org/schema/beanshttp://www.springframework.org/schema/beans/spring-beans.xsdhttp://www.springframework.org/schema/aophttp://www.springframework.org/schema/aop/spring-aop.xsd"><!--注册bean--><bean id="userService" class="com.kuang.service.UserServiceImpl"/><bean id="log" class="com.kuang.log.Log"/><bean id="afterLog" class="com.kuang.log.AfterLog"/><!--aop的配置--><aop:config><!--切入点 expression:表达式匹配要执行的方法--><aop:pointcut id="pointcut" expression="execution(* com.kuang.service.UserServiceImpl.*(..))"/><!--执行环绕; advice-ref执行方法 . pointcut-ref切入点--><aop:advisor advice-ref="log" pointcut-ref="pointcut"/><aop:advisor advice-ref="afterLog" pointcut-ref="pointcut"/></aop:config></beans>
4)测试类
public class MyTest {@Testpublic void test(){ApplicationContext context = new ClassPathXmlApplicationContext("beans.xml");UserService userService = (UserService) context.getBean("userService");userService.search();}}

实现二:自定义类来实现Aop
--目标业务类不变依旧是userServiceImpl
1)第一步 : 写我们自己的一个切入类public class DiyPointcut {public void before(){System.out.println("---------方法执行前---------");}public void after(){System.out.println("---------方法执行后---------");}}
2)去spring中配置
<!--第二种方式自定义实现--><!--注册bean--><bean id="diy" class="com.kuang.config.DiyPointcut"/><!--aop的配置--><aop:config><!--第二种方式:使用AOP的标签实现--><aop:aspect ref="diy"><aop:pointcut id="diyPonitcut" expression="execution(* com.kuang.service.UserServiceImpl.*(..))"/><aop:before pointcut-ref="diyPonitcut" method="before"/><aop:after pointcut-ref="diyPonitcut" method="after"/></aop:aspect></aop:config>
3)测试
public class MyTest {@Testpublic void test(){ApplicationContext context = new ClassPathXmlApplicationContext("beans.xml");UserService userService = (UserService) context.getBean("userService");userService.add();}}
实现三:使用注解实现
1)第一步:编写一个注解实现的增强类@Aspect //标注这个类是一个切面public class AnnotationPointcut {@Before("execution(* com.kuang.service.UserServiceImpl.*(..))")public void before(){System.out.println("---------方法执行前---------");}@After("execution(* com.kuang.service.UserServiceImpl.*(..))")public void after(){System.out.println("---------方法执行后---------");}// 在环绕增强中,我们可以给定一个参数,代表我们要获取处理切入的点@Around("execution(* com.kuang.service.UserServiceImpl.*(..))")public void around(ProceedingJoinPoint jp) throws Throwable {System.out.println("环绕前");System.out.println("签名:"+jp.getSignature());//执行目标方法proceedObject proceed = jp.proceed();System.out.println("环绕后");System.out.println(proceed);}}
2)第二步:在Spring配置文件中,注册bean,并增加支持注解的配置
<!--第三种方式:注解实现--><bean id="annotationPointcut" class="com.kuang.config.AnnotationPointcut"/><aop:aspectj-autoproxy/>
aop:aspectj-autoproxy:说明
--通过aop命名空间的声明自动为spring容器中那些配置@aspectJ切面的bean创建代理,织入切面。当然,spring 在内部依旧采用AnnotationAwareAspectJAutoProxyCreator进行自动代理的创建工作,但具体实现的细节已经被隐藏起来了
--有一个proxy-target-class属性,默认为false,表示使用jdk动态代理织入增强,当配为时,表示使用CGLib动态代理技术织入增强。不过即使proxy-target-class设置为false,如果目标类没有声明接口,则spring将自动使用CGLib动态代理。

3)测试public class MyTest {@Testpublic void test(){ApplicationContext context = new ClassPathXmlApplicationContext("beans.xml");UserService userService = (UserService) context.getBean("userService");userService.add();}}
tips:
代理模式 基于接口 JDK动态(默认) 基于类 cglib
参数设置false为JDK;默认false ;几乎不用,设置为true 结果无区别

应用-外数
- 1 外数日志管理
--日志收集用到了aop切面,位于【..admin.aspect】
--通过环绕通知收集了,被注解【OperationLog】标注的方法的相关信息,并存入日志表【DM_OPERATION_LOG】
--然后就是对日志表的查询、查看、导出等基本操作,对应的controller位于【..admin.controller.manage.log.OperationLogController】 - 在api请求流程的service中使用切面处理日志(queryLog)。在单接口切面和融合接口总接口切面中,将存储任务ProduceLogRunnable提交到线程池。ProduceLogRunnable再把queryLog推送到消息队列。QueryHandler消费消息:
1)存储query_log
2)解析并存储结构化数据
3)计费
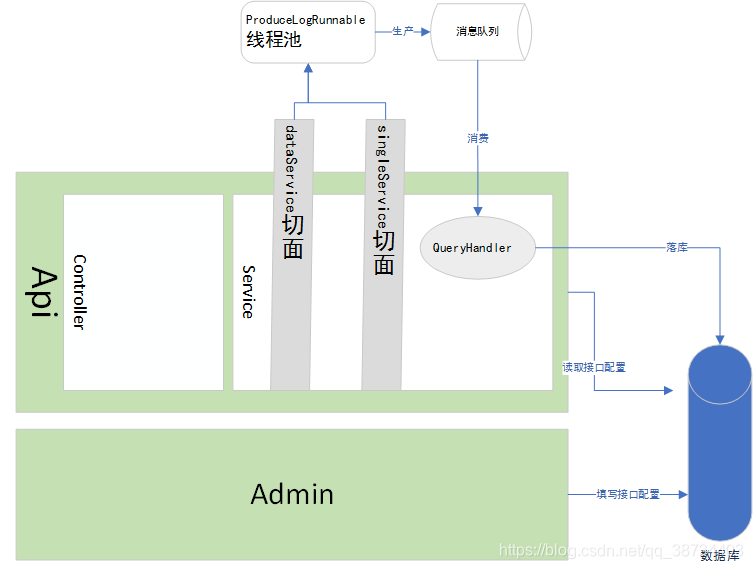
2 实体-表
@Data@EqualsAndHashCode(callSuper = false)@Accessors(chain = true)@KeySequence("DM_OPERATION_LOG_SEQUENCE")public class DmOperationLog implements Serializable {@TableIdprivate Long id;@TableField(fill = FieldFill.INSERT)private String userName;@TableField(fill = FieldFill.INSERT)private String userIp;@TableField(fill = FieldFill.INSERT)private String accessUrl;@TableField(fill = FieldFill.INSERT)private String operationDesc;@TableField(fill = FieldFill.INSERT)private String statusCode;@TableField(fill = FieldFill.INSERT)private String operationStatus;@TableField(fill = FieldFill.INSERT)@JsonFormat(pattern = "yyyy-MM-dd HH:mm:ss", timezone = "GMT+8")private Date operationTime;}
3 aspect
1)OperationLog//HISTORY_BATCH("hsitory_batch","历史调用-批量");@Target({ElementType.METHOD})@Retention(RetentionPolicy.RUNTIME)@Documentedpublic @interface OperationLog {/*** 操作类型* @return*/OperationTypeEnum type() default OperationTypeEnum.HISTORY_SINGLE;}
2)OperationAopLog
主要将操作日志存入表/*** 操作日志切面*/@Aspect@Component@Slf4jpublic class OperationAopLog {@ResourceIDmOperationLogService operationLogService;@Pointcut(value = "@annotation(com.rong360.tianji.tob.suzhou.data.admin.aspect.OperationLog)")public void log() {}@Around("log()&& @annotation(operationLog)")public Object aroundLog(ProceedingJoinPoint point,OperationLog operationLog) throws Throwable {DmOperationLog dmOperationLog = new DmOperationLog();//设置用户名和操作描述String userName = getUserName(operationLog, point);dmOperationLog.setUserName(userName);dmOperationLog.setOperationDesc(operationLog.type().getZhName());//设置用户IP和访问URLsetIPAndURL(dmOperationLog);Object result = null;try {//方法执行result = point.proceed();//结果判断if(result instanceof Result){String statusCode = ((Result) result).getCode().toString();dmOperationLog.setStatusCode(statusCode);String operationStatus = "200".equals(statusCode)? OperationStatusEnum.SUCCESS.getZhName() :OperationStatusEnum.FAIL.getZhName();dmOperationLog.setOperationStatus(operationStatus);}else {dmOperationLog.setStatusCode("200");dmOperationLog.setOperationStatus(OperationStatusEnum.SUCCESS.getZhName());}saveOperationLog(dmOperationLog);} catch (Exception e){dmOperationLog.setStatusCode("400");dmOperationLog.setStatusCode(OperationStatusEnum.FAIL.getZhName());saveOperationLog(dmOperationLog);throw e;}return result;}/*** 获取用户名* @param operationLog* @param point* @return*/private String getUserName(OperationLog operationLog, ProceedingJoinPoint point) {try {//登录操作从接口参数获取用户名,其他操作从session获取用户名if (operationLog.type() == OperationTypeEnum.LOGIN) {Object[] args = point.getArgs();LoginVO loginVO = (LoginVO) args[0];return loginVO.getName();} else {Session session = SecurityUtils.getSubject().getSession();return session.getAttribute("user_name").toString();}} catch (Exception e) {log.error("get user name error:{}", e);return "";}}/*** 设置用户ip和访问url* @param dmOperationLog*/private void setIPAndURL(DmOperationLog dmOperationLog){HttpServletRequest request = null;try {ServletRequestAttributes attributes = (ServletRequestAttributes) RequestContextHolder.getRequestAttributes();request = attributes.getRequest();dmOperationLog.setUserIp(IPUtils.getIP(request));dmOperationLog.setAccessUrl(request.getRequestURI());}catch (Exception e){log.error("set IP and URL error:{}", e);}}/*** 操作记录入库** @param dmOperationLog*/private void saveOperationLog(DmOperationLog dmOperationLog) {try {dmOperationLog.setOperationTime(new Date());operationLogService.save(dmOperationLog);}catch (Exception e){log.error("save operation OperationLogController error:{}", e);}}}
3 使用
@OperationLog(type = OperationTypeEnum.HISTORY_BATCH)@PostMapping("savetask")@RequiresPermissions("userquery:multi")public Result QueryTask(@RequestBody QueryTaskInputVO queryTaskInputVO) {String message = queryTaskService.checkTaskInput(queryTaskInputVO);if (!StrUtil.isEmpty(message)) {return Result.fail(400, message);}Boolean state = queryTaskService.insertTask(queryTaskInputVO);if (state) {return Result.success();}return Result.fail();}
4 对表的操作:OperationLogController
@RestController@RequestMapping(value = "/logManage")@Slf4jpublic class OperationLogController {@AutowiredIOperationLogService operationLogService;@Value("classpath:json/table-header-log.json")private org.springframework.core.io.Resource logTableHeader;/*** 获取下拉选项* @return*/@RequestMapping(value = "/search")@RequiresPermissions("log:view")public Result getSelectData() {try {Map<String, Object> map = operationLogService.getSelectData();return Result.success(map);} catch (Exception e) {log.error("获取下拉框失败:{}", e);return Result.fail(400, "内部异常");}}/*** 获取操作日志列表** @param operationLogVO* @return*/@RequestMapping(value = "/list")@RequiresPermissions("log:view")public Result list(@RequestBody OperationLogVO operationLogVO){try {// 按日期查询的时候 2020-01-01 - 2020-01-01 查询的实际截至时间是 2020-01-02 00:00:00if (operationLogVO.getEndTime()!=null){Date voEndTime = DateUtil.parse(operationLogVO.getEndTime(), "yyyy-MM-dd");DateTime relEndTime = DateUtil.offset(voEndTime, DateField.DAY_OF_MONTH, 1);operationLogVO.setEndTime(DateUtil.formatDate(relEndTime));}Map<String, Object> map = operationLogService.getList(operationLogVO);map.put("columns", Utils.getJsonArray(logTableHeader));return Result.success(map);} catch (Exception e) {log.error("获取配置列表失败:{}", e);return Result.fail(400, "内部异常");}}/*** 操作日志列表导出** @return*/@GetMapping(value = "/download")@RequiresPermissions("log:view")public void export(HttpServletResponse response,@RequestParam(value = "log_desc", required = false) String operationDesc,@RequestParam(value = "log_user", required = false) String userName,@RequestParam(value = "end_time", required = false) String endTime,@RequestParam(value = "start_time", required = false) String startTime,@RequestParam(value = "log_ip", required = false) String userIp,@RequestParam(value = "log_url", required = false) String accessUrl,@RequestParam(value = "log_status", required = false) String operationStatus,@RequestParam(value = "log_code", required = false) String statusCode) {try {OperationLogVO operationLogVO = new OperationLogVO();if (StringUtils.isNotBlank(userName)) {operationLogVO.setUserName(userName);}if (StringUtils.isNotBlank(operationDesc)) {operationLogVO.setOperationDesc(operationDesc);}if (StringUtils.isNotBlank(userIp)) {operationLogVO.setUserIp(userIp);}if(StringUtils.isNotBlank(accessUrl)){operationLogVO.setAccessUrl(accessUrl);}if(StringUtils.isNotBlank(statusCode)){operationLogVO.setStatusCode(statusCode);}if(StringUtils.isNotBlank(operationStatus)){operationLogVO.setOperationStatus(operationStatus);}if(StringUtils.isNotBlank(startTime)){operationLogVO.setStartTime(startTime);}if(StringUtils.isNotBlank(endTime)){Date voEndTime = DateUtil.parse(endTime);Date relEndTime = DateUtil.offset(voEndTime, DateField.DAY_OF_MONTH, 1);operationLogVO.setEndTime(DateUtil.formatDate(relEndTime));}operationLogService.exportList(response,operationLogVO);} catch (Exception e) {log.error("获取配置列表导出失败:{}", e);//return Result.fail(400, "内部异常");}}}
Bean的生命周期
- 生命周期
实例化和属性赋值对应构造方法和setter方法的注入,初始化和销毁是用户能自定义扩展的两个阶段。
① 实例化 Instantiation
② 属性赋值 Populate
③ 初始化 Initialization
④ 销毁 Destruction
1、解析类得到BeanDefinition
2、如果有多个构造方法,则要推断构造方法
3、确定好构造方法后,进行实例化得到一个对象
4、对对象中的加了@Autowired注解的属性进行属性填充
5、回调Aware方法,比如BeanNameAware,BeanFactoryAware
6、调用BeanPostProcessor的初始化前的方法
7、调用初始化方法
8、调用BeanPostProcessor的初始化后的方法,在这里会进行AOP
9、如果当前创建的bean是单例的则会把bean放入单例池
10、使用bean
11、Spring容器关闭时调用DisposableBean中destory()方法
循环依赖
- 循环依赖
- 三级缓存
- 循环依赖的解决_ab

1)什么是循环依赖
@Componentpublic class A {// A中注入了B@Autowiredprivate B b;}@Componentpublic class B {// B中也注入了A@Autowiredprivate A a;}
- 2)三级缓存
三级缓存|
Spring中的一级缓存名为singletonObjects,二级缓存名为earlySingletonObjects,三级缓存名为singletonFactories,除了一级缓存是ConcurrentHashMap之外,二级缓存和三级缓存都是HashMap。它们的定义是在DefaultSingletonBeanRegistry类中。

① 一级缓存:singletonObjects
单例池,存已创建完成的对象(单例Bean)
② 三级缓存:singletonFactories
提前暴露的一个单例工厂,二级缓存中存储的就是从这个工厂中获取到的对象;
③ 二级缓存:earlySingletonObjects
完成实例化,但是还依赖注入、初始化的对象 - 3)依赖注入过程
--a完成实例化、注解收集、存入三级缓存池
--依赖注入时会调用 getBean(“b”)
--由于循环依赖,当调用getBean(“b”)时,b会完成创建实例、收集注解、加入三级缓存,在进行依赖注入时,会调用getBean(“a”)
--当执行getBean(“a”)会从三级缓存中获取到bean,并且把升级到二级缓存,删除三级缓存信息。
--这样b能获取到a,完成依赖注入,初始化。
--获取到创建完成b后,添加到单例池,并且删除二级、三级缓存池信息。
设计模式
https://blog.csdn.net/qq_34125999/article/details/114858004
Spring的事务
- https://snailclimb.gitee.io/javaguide/#/docs/system-design/framework/spring/Spring%E4%BA%8B%E5%8A%A1%E6%80%BB%E7%BB%93
- 1)事务概念
事务是逻辑上的一组操作,要么都执行,要么都不执行。
特性:ACID
程序是否支持事务首先取决于数据库, innodb 引擎支持事务的。 - 2)Spring 支持两种方式的事务管理
1)编程式事务管理
通过 TransactionTemplate或者TransactionManager手动管理事务,实际应用中很少使用,但是对于你理解 Spring 事务管理原理有帮助。
2)声明式事务管理
推荐使用(代码侵入性最小),实际是通过 AOP 实现(基于@Transactional 的全注解方式使用最多)。
Spring事务的实现方式和原理以及隔离级别?
在使用Spring框架时,可以有两种使用事务的方式,一种是编程式的,一种是申明式的,
--@Transactional注解就是申明式的。
首先,事务这个概念是数据库层面的,Spring只是基于数据库中的事务进行了扩展,以及提供了一些能让程序员更加方便操作事务的方式。
比如我们可以通过在某个方法上增加@Transactional注解,就可以开启事务,这个方法中所有的sql都会在一个事务中执行,统一成功或失败。
在一个方法上加了@Transactional注解后,Spring会基于这个类生成一个代理对象,会将这个代理对象作为bean,当在使用这个代理对象的方法时,如果这个方法上存在@Transactional注解,那么代理逻辑会先把事务的自动提交设置为false,然后再去执行原本的业务逻辑方法,如果执行业务逻辑方法没有出现异常,那么代理逻辑中就会将事务进行提交,如果执行业务逻辑方法出现了异常,那么则会将事务进行回滚。
当然,针对哪些异常回滚事务是可以配置的,可以利用@Transactional注解中的rollbackFor属性进行配置,默认情况下会对RuntimeException和Error进行回滚。spring事务隔离级别就是数据库的隔离级别:外加一个默认级别
read uncommitted(未提交读)
read committed(提交读、不可重复读)
repeatable read(可重复读)
serializable(可串行化)
数据库的配置隔离级别是Read Commited,而Spring配置的隔离级别是Repeatable Read,请问这时隔离级别是以哪一个为准?
以Spring配置的为准,如果spring设置的隔离级别数据库不支持,效果取决于数据库
传播机制
- spring事务传播机制多个事务方法相互调用时,事务如何在这些方法间传播
例子:方法A是一个事务的方法,方法A执行过程中调用了方法B,那么方法B有无事务以及方法B对事务的要求不同都会对方法A的事务具体执行造成影响,同时方法A的事务对方法B的事务执行也有影响,这种影响具体是什么就由两个方法所定义的事务传播类型所决定。
--REQUIRED(Spring默认的事务传播类型):required如果当前没有事务,则自己新建一个事务,如果当前存在事务,则加入这个事务
--SUPPORTS:supports当前存在事务,则加入当前事务,如果当前没有事务,就以非事务方法执行
--MANDATORY:mandatory当前存在事务,则加入当前事务,如果当前事务不存在,则抛出异常。
--REQUIRES_NEW:requires_new创建一个新事务,如果存在当前事务,则挂起该事务。
--NOT_SUPPORTED:not_supported以非事务方式执行,如果当前存在事务,则挂起当前事务
--NEVER:never不使用事务,如果当前事务存在,则抛出异常
--NESTED:nested如果当前事务存在,则在嵌套事务中执行,否则REQUIRED的操作一样(开启一个事务)
和REQUIRES_NEW的区别:
REQUIRES_NEW是新建一个事务并且新开启的这个事务与原有事务无关,而NESTED则是当前存在事务时(我们把当前事务称之为父事务)会开启一个嵌套事务(称之为一个子事务)。 在NESTED情况下父事务回滚时,子事务也会回滚,而在REQUIRES_NEW情况下,原有事务回滚,不会影响新开启的事务。
和REQUIRED的区别:REQUIRED情况下,调用方存在事务时,则被调用方和调用方使用同一事务,那么被调用方出现异常时,由于共用一个事务,所以无论调用方是否catch其异常,事务都会回滚 而在NESTED情况下,被调用方发生异常时,调用方可以catch其异常,这样只有子事务回滚,父事务不受影响
事务失效
spring事务的原理是AOP,进行了切面增强,那么失效的根本原因是这个AOP不起作用了!常见情况有如下几种
1、发生自调用,类里面使用this调用本类的方法(this通常省略),此时这个this对象不是代理类,而是UserService对象本身!
解决方法很简单,让那个this变成UserService的代理类即可!

2、方法不是public的
@Transactional 只能用于 public 的方法上,否则事务不会失效,如果要用在非 public 方法上,可以开启 AspectJ 代理模式。
3、数据库不支持事务
4、没有被spring管理
5、异常被吃掉,事务不会回滚(或者抛出的异常没有被定义,默认为RuntimeException)
应用
@Transactional 的工作机制是基于 AOP 实现的,AOP 又是使用动态代理实现的。如果目标对象实现了接口,默认情况下会采用 JDK 的动态代理,如果目标对象没有实现了接口,会使用 CGLIB 动态代理。**
多提一嘴:createAopProxy() 方法 决定了是使用 JDK 还是 Cglib 来做动态代理
Spring MVC的执行流程
- [51-56]
- 执行流程
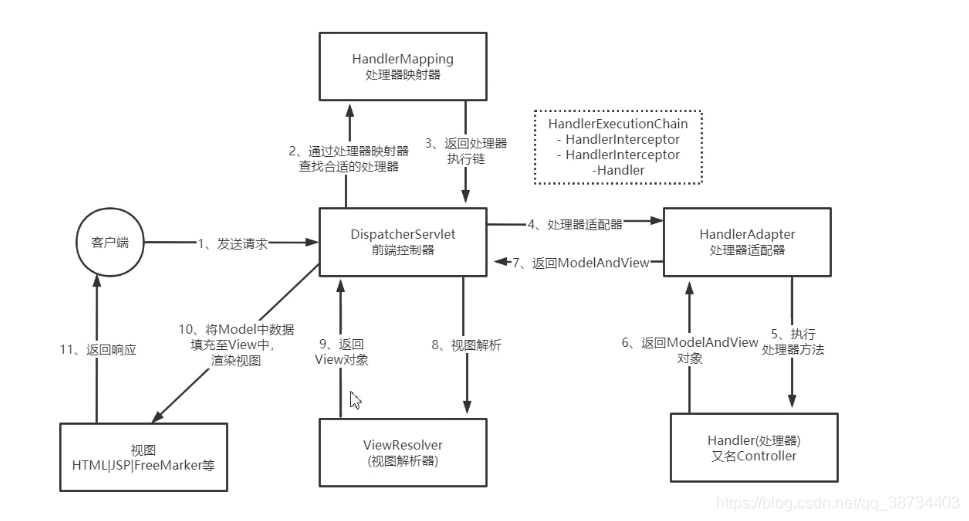
- springboot的启动流程
https://blog.csdn.net/u014352080/article/details/102716468
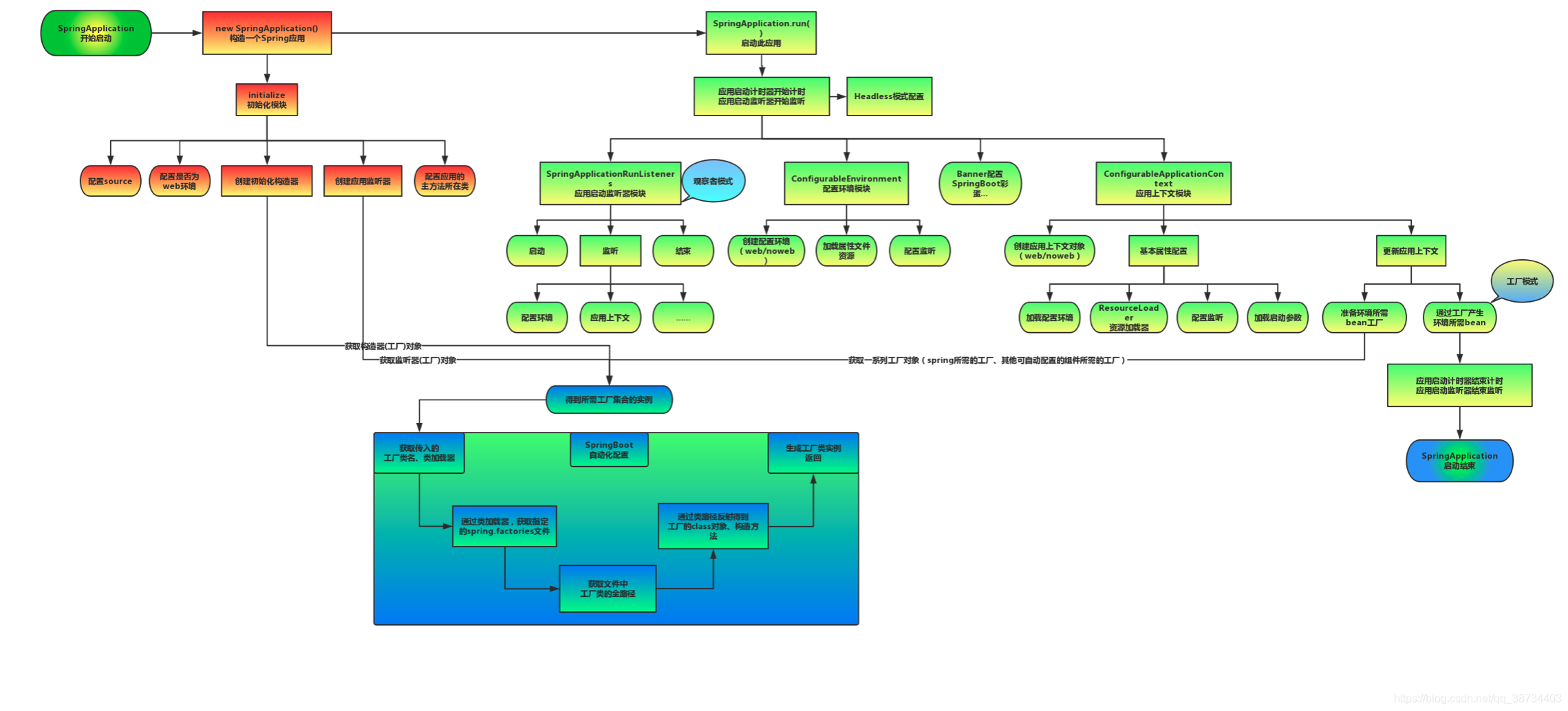
springboot的自动配置
- 原理:@Import + @Configuration + Spring spi
自动配置类由各个starter提供,使用@Configuration+@Bean定义配置类,放到METAINF/spring.factories下使用Spring spi扫描META-INF/spring.factories下的配置类使用@Import导入自动配置类
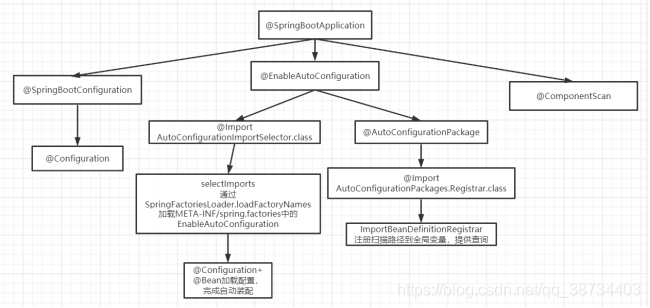
Springboot的Starter
使用spring + springmvc使用,如果需要引入mybatis等框架,需要到xml中定义mybatis需要的bean, starter就是定义一个starter的jar包,写一个@Configuration配置类、将这些bean定义在里面,然后在starter包的META-INF/spring.factories中写入该配置类,springboot会按照约定来加载该配置类开发人员只需要将相应的starter包依赖进应用,进行相应的属性配置(使用默认配置时,不需要配置),就可以直接进行代码开发,使用对应的功能了,比如mybatis-spring-boot--starter,springboot-starter-redis
Spring Boot、Spring MVC 和 Spring 有什么区别
- spring是一个IOC容器,用来管理Bean,使用依赖注入实现控制反转,可以很方便的整合各种框架,提供AOP机制弥补OOP的代码重复问题、更方便将不同类不同方法中的共同处理抽取成切面、自动注入给方法执行,比如日志、异常等
- springmvc是spring对web框架的一个解决方案,提供了一个总的前端控制器Servlet,用来接收请求,然后定义了一套路由策略(url到handle的映射)及适配执行handle,将handle结果使用视图解析技术生成视图展现给前端
- springboot是spring提供的一个快速开发工具包,让程序员能更方便、更快速的开发spring+springmvc应用,简化了配置(约定了默认配置),整合了一系列的解决方案(starter机制)、redis、mongodb、es,可以开箱即用
@Controller和@RestController
8.如果Controller层想返回的数据是JSON格式的,怎么办。
RestController
mybatis
https://zhuanlan.zhihu.com/p/104941876
9-中间件
ZooKeeper
- me
- 实践:https://blog.csdn.net/u010391342/article/details/100404588
https://blog.csdn.net/qq_38734403/article/details/115209176
RabbitMQ
https://www.cnblogs.com/ysocean/p/9227233.html
Kafka
0-项目
版本
mysql运维
mysql 5.6 => 5.7redis-占数师
redis-server --version
Redis server v=4.0.10 sha=00000000:0 malloc=jemalloc-4.0.3 bits=64 build=9e1e501b91e06bf9redis-oa
2.6 其他运维告知 3.0.6kafka版本
offset保存位置不同
zookeeper环境:3.4.14-已跟线上版本一致
kafka单机环境(2.11-2.0.0版本)Kafka-外数(2.2.9)
org.springframework.kafka
spring-kafka
占数师
0-项目概述
背景:
针对app、微信等多种渠道的用户行为数据进行采集;将各类行为数据进行整合,与公司内线下数据、公司外数据结合;开展行为数据分析,提供相应数据分析功能和工具;提供相关业务功能和可视化展示页面。工程中用到的技术
- 总:
① 数据流


② 项目名称
data_generator: 生成测试数据(php)
dc_openresty:lua脚本
log_service:数据收集(重点)
realtime-task:flink实时写入(重点)
skynet-backend: web工程(重点)
das-api: 数据服务平台(重点)
zsh_docker:一键部署
③ 知识点:
lua脚本、filebeat、kafka、flink、impala、kudu、springboot、docker - 分:
① 客户端app+openresty
客户端app会将埋点数据加密后,请求dc-skynet.rong360.com下/prod/send_data接口上传数据。
nginx运行lua脚本获取数据,进行封装,写入log。脚本参见zsh_docker工程
② 日志收集+log-service
app端或者客户服务端打点数据过来后,会在日志收集系统中进行数据的简单校验和转换,同时添加用户标识id。定义转换为放入 kafka 的消息格式。
1> 数据收集
后台脚本不断扫描数据文件是否有新的写入 com\example\log_service\common\ThreadPoolExecutor.java
a.生产者不断扫描文件判断是否有新数据写入,如果有新数据写入将数据读取,并推送至阻塞队列中
b.消费者主线程不断监听阻塞队列,如果有数据将数据取出发送给消费线程池进行消费
c.消费线程负责数据处理、保存等
2> 日志数据的处理
1)日志消费分为sdk日志和nginx的log日志
2)Nginx日志消费com\example\log_service\common\NgConsumeService.java
a.数据的decode,unzip等操作,解析出json格式数据
b.Sdk日志消费 com\example\log_service\common\SdkConsumeService.java
将数据直接解析成json格式数据
c.Json格式处理 com\example\log_service\domain\impl\LogServiceImpl.java
3)数据存储,通过log4j日志插件将日志保存至文件中代码:
com\example\log_service\common\writelogs\LogFileOperator.java

③ filebeat:
数据推送到kafka。配置参考zsh_docker工程
④ realtime-task:
利用flink程序消费kafka,将数据存入kudu实时表。
⑤ skynet:
元数据、漏斗分析、用户分群、事件分析、后端推送消息(websocket)
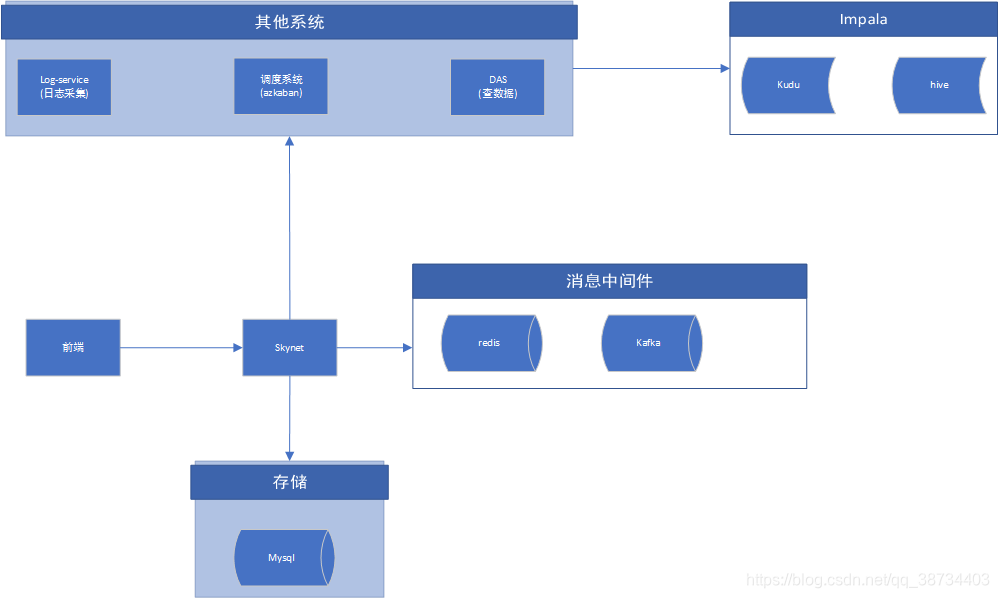
⑥ das
1> 背景:
数据应用层在整个系统架构中承担了业务系统对数据层的访问逻辑。为适应各种业务的变化带来的数据应用层频繁开发新接口上线问题,数据应用层需要对现有的异构数据源(包括但不限于MySQL, Redis, Impala等)进行抽象,提供出公共数据服务接口,以应对业务应用层多变的数据查询需求。

⑦ 大数据端
1> 数据层交互架构图

2> 数仓架构图

3> 查询方式
kudu表当天分区增量和hive历史数据做union all 建成视图,供外提供查询:
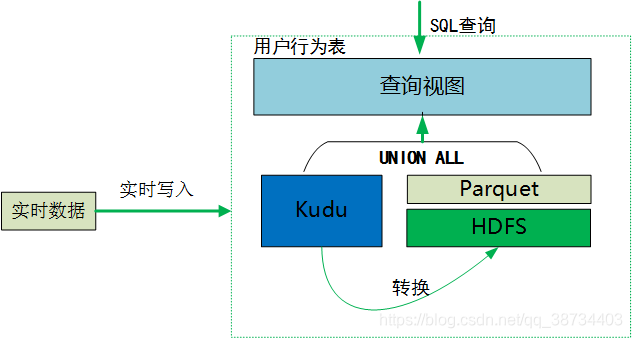
- 总:
1-skynet结构
- 总:skynet:
元数据、漏斗分析、用户分群、事件分析、后端推送消息(websocket)
1> log-sevice
log-service需要知道收集日志的校验格式,而其所以来的元数据是在skynet一方维护,因此当skynet的元数据出现新增,删除,修改等变更之后需要将信息同步到log-service。
目前两者之间的通信方式是基于redis。
2>任务调度azkaban
由于DAS目前不提供DDL 操作以及插入等功能,在用户分群模块需要将符合条件的用户圈选出来。
目前使用SQL查询并插入的方式进行用户分群。其中会涉及到新建的情况
azkaban调度结束后,skynet通过轮训调度任务的方式进行获取状态,再通过DAS查询出具体的结果集。
3>消息推送websocket
对于一些异常操作的场景,如漏斗计算,需要等待大数据计算完结果之后,将消息推送到前端,目前使用websocket的方式实现。
4>技术栈
Spring Boot + Mybatis-plus + Websocket + Maven
- 事件分析:
① 需求:

② 实现
1)查询条件:skynet提供三个接口:
1> 获取所有事件
2> 获取单个事件相关指标
3> 获取多个事件指标公共的属性
2)查询:(异步、同步)

1> 按小时维度作时间窗口,进行缓存。
2> 单个页面的查询作为1个任务,按事件指标分为多个子任务。保存子任务的查询的条件。
3> 单个子任务查询完成后,保存结果到task_info表,若存在下一个子任务,则继续调用das接口进行查询。
4> 全部子任务查询完毕后,发送消息。
5> 若可从缓存中获取结果,则同步返回,否则走异步流程。
6> 若查询是和用户相关,则返回特殊标记及子任务id,以便后续进行“查看用户列表”和“添加分群”功能。
7> 消息处理流程,暂定与漏斗分析保持一致。
3)查看用户列表:通过sql模板调用接口查询用户(同步)。

4)添加分群(同步)
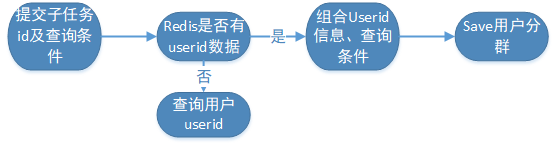
③ 大数据端
1 查询引擎:impala,中间结果表存储在:htp 库。das落地中间表关键字 htp.tmp_skynet_event_analysis_d (日表) _event_analysis_,格式:stored as parquet
2 数据表:
数据存储规范:kudu实时来源表,暂定存储周期三个月。
范围:最新全量用户表,最新全量用户扩展表,离线和实时事件表
中间表:无
4模板拼接:
1)逻辑,小于3个月的数据直接查询kudu的视图表,时间跨度大于3个月且包含实时数据的查询使用,离线+当周期的视图表,不包含本周期的实时数据且查询时间大于3个月直接查询离线表。
2)涉及到交叉表的数据展示,待das和前端评审确认
5 查询性能:预估分钟级
6 数据工作:离线流程开发,模板开发
7 页面必须默认事件
数据流程图:
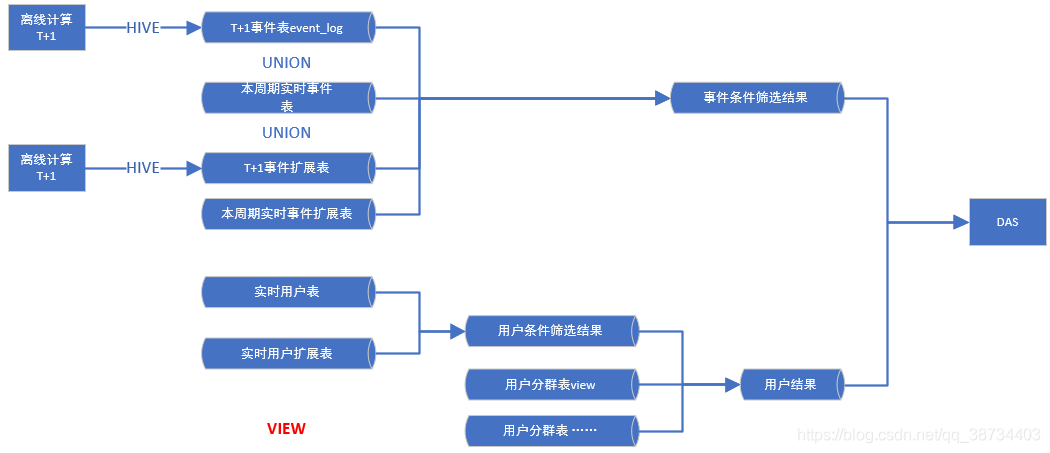
2-元数据设计
1)需求
1> 元数据使用流程:

2> 元数据上下游关系
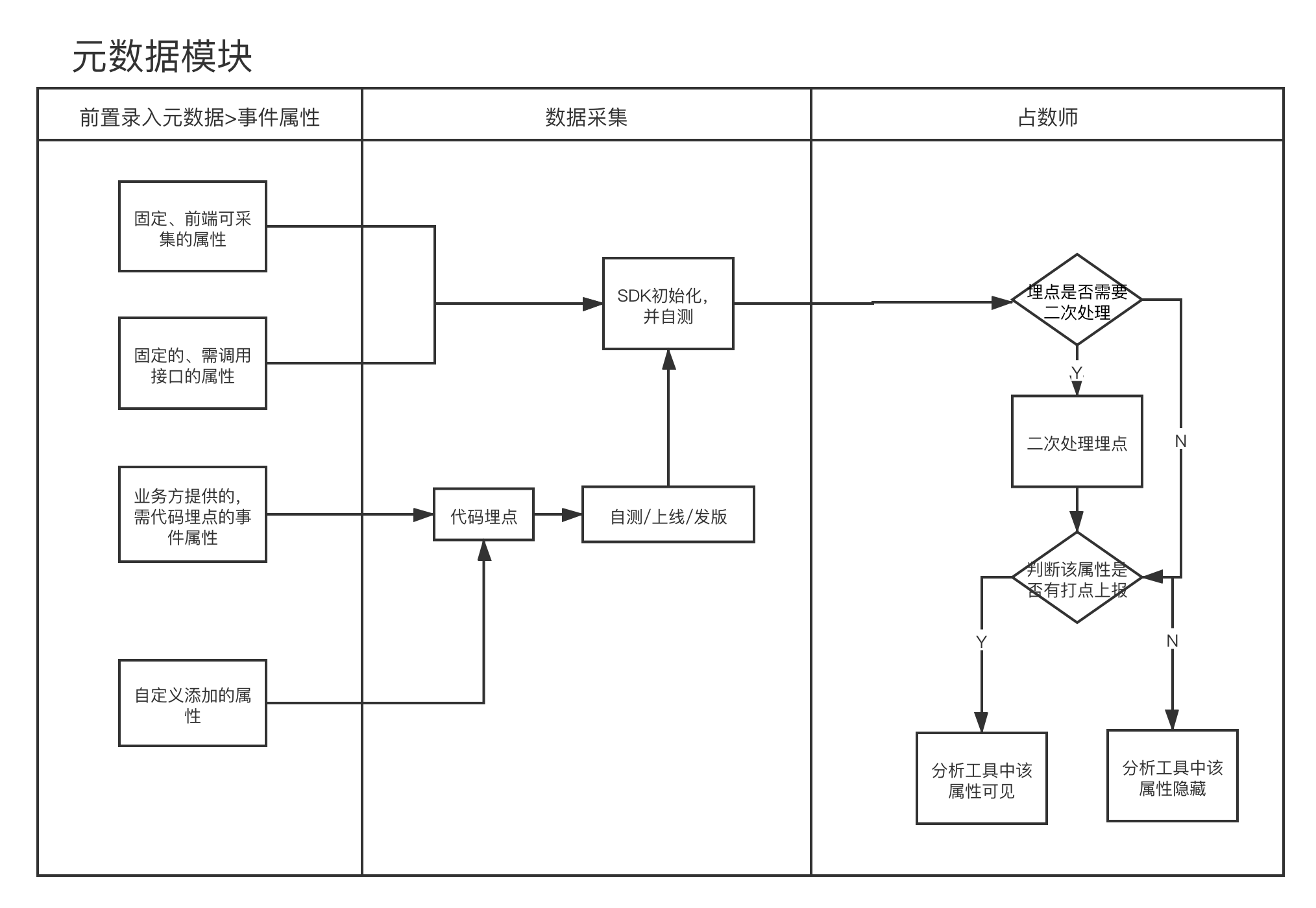
2)技术方案
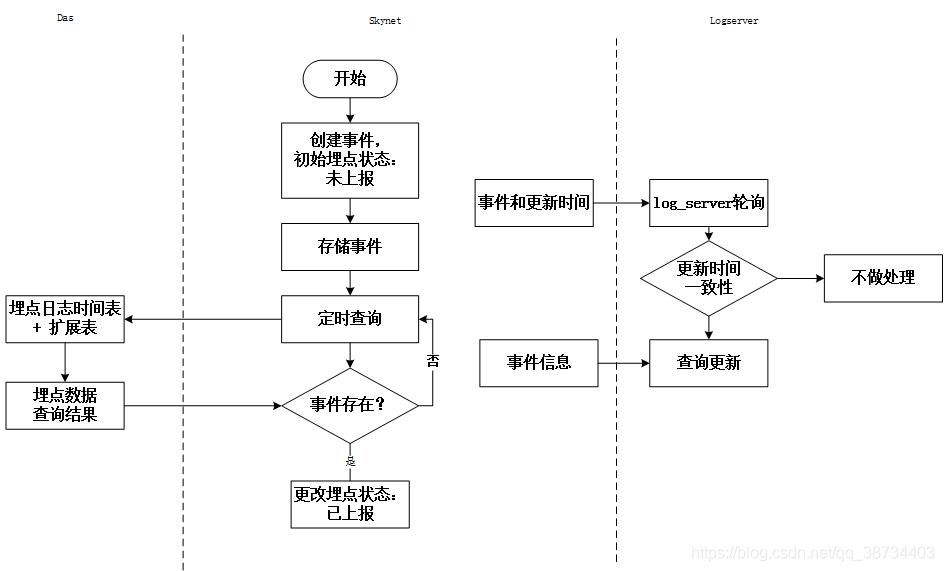
3)优化
使用zookeeper
3-留存分析
留存分析需求
1)日留存中间表schema设计
a、log_dt,skynet_user_id 作为主键
b、表命名规则?krs.tmp_用户_时间戳?
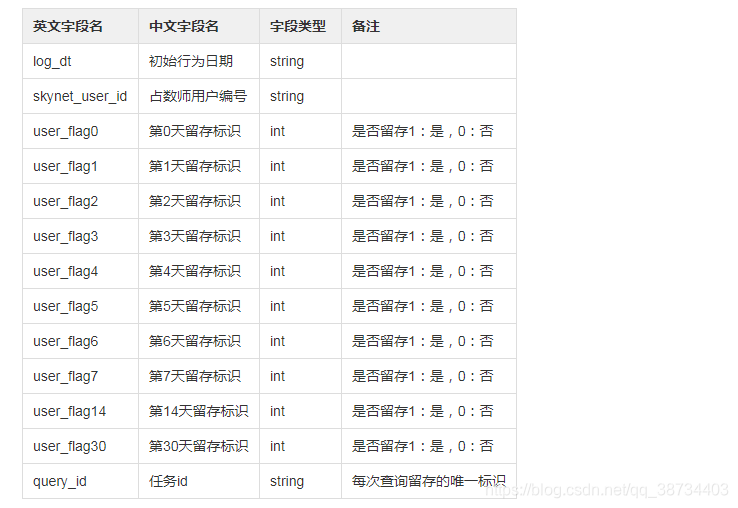
外数
0-技术栈
前端:Vue + highChart
后端: Spring boot + MyBatis-Plus+ Quartz+ QLExpress + Shiro
数据库:Oracle
缓存+队列:Redis
监控+日志收集:Open-Falcon+Kibana
1-系统结构
功能
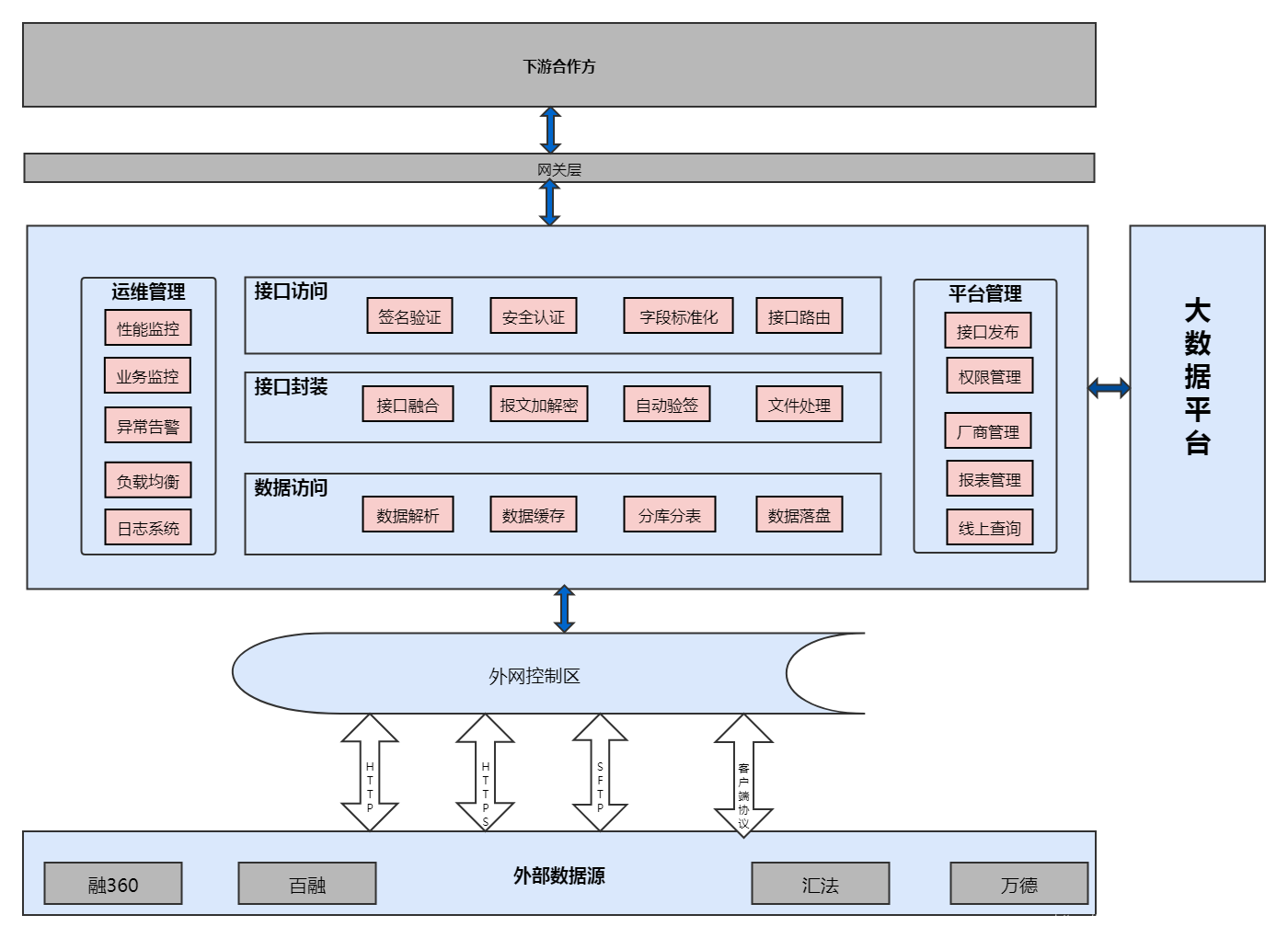
技术栈
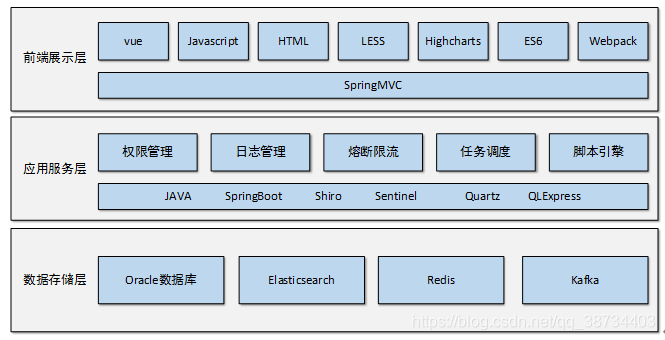
数据流
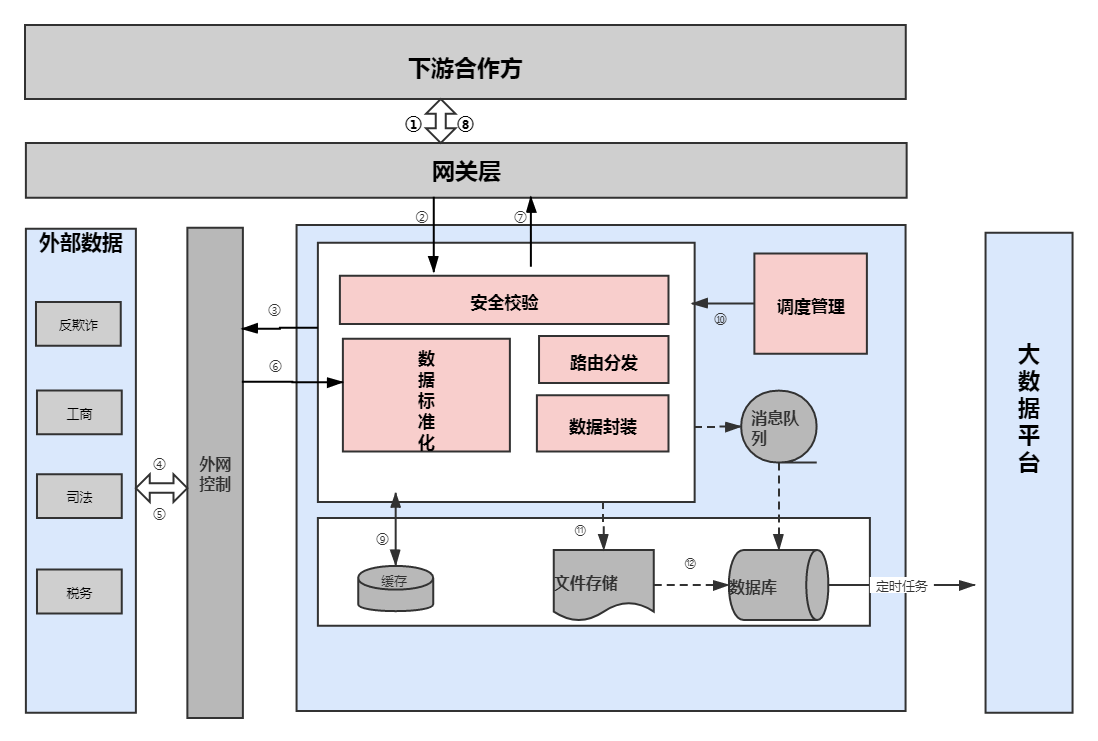
调用
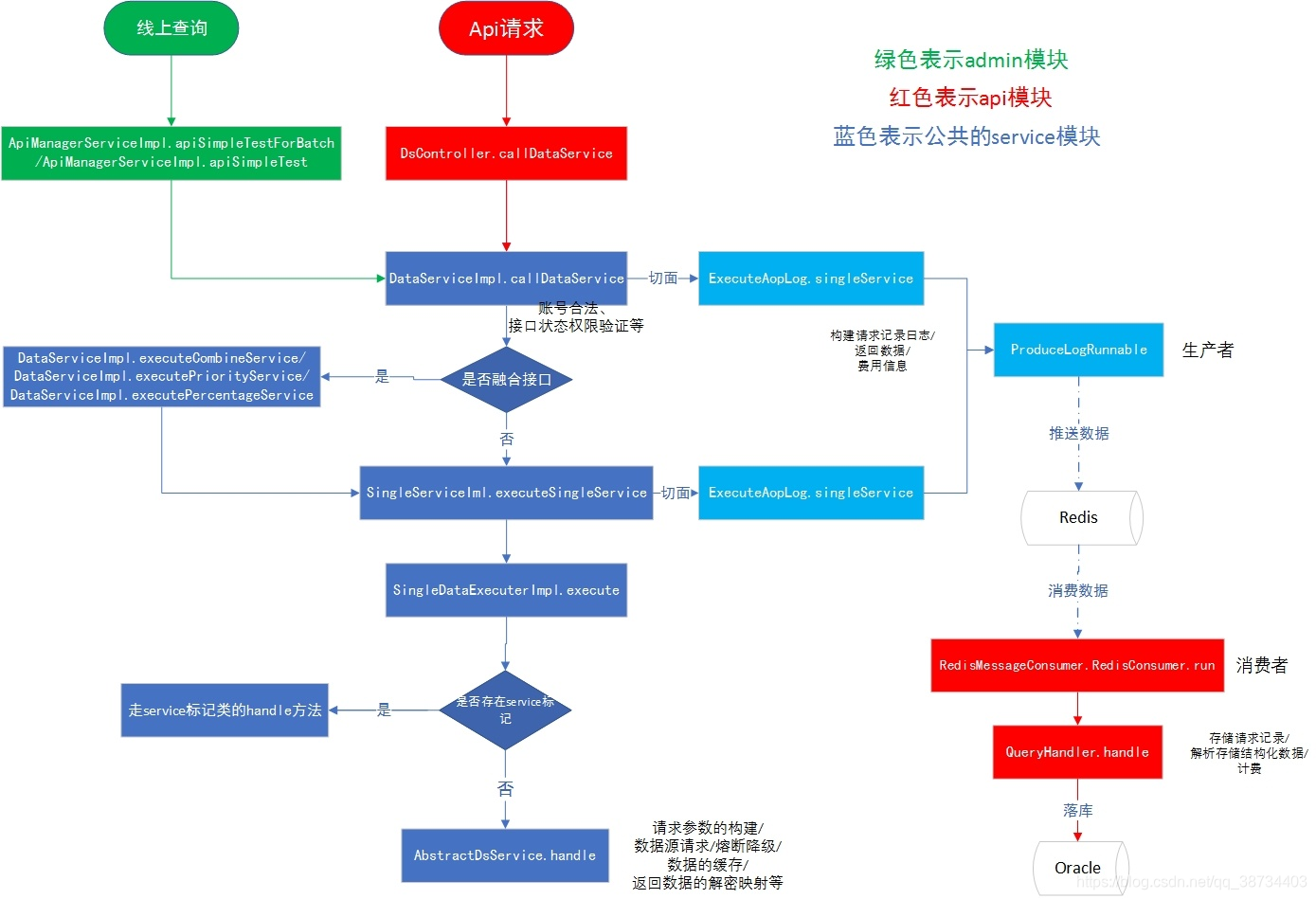
2-监控
- 监控

--用户配置监控后,按监控频率生成一个quartz定时任务,并保存监控配置到MonitorSetting表(MonitorSetting保存了监控频率,阈值,规则以及数据收集器)。quartz任务MonitorJob按crontab执行,获取数据收集器搜集数据,用搜集到的数据和MonitorSetting信息生成MonitorDataBean并offer到阻塞队列中。
--应用启动时,MonitorCommand中提交(默认两个)MonitorRunnable到线程池。MonitorRunnable循环poll阻塞队列中的MonitorDataBean,并根据MonitorDataBean的数据和报警规则判断是否触发报警。
时间戳
项目量级
- 20w数据
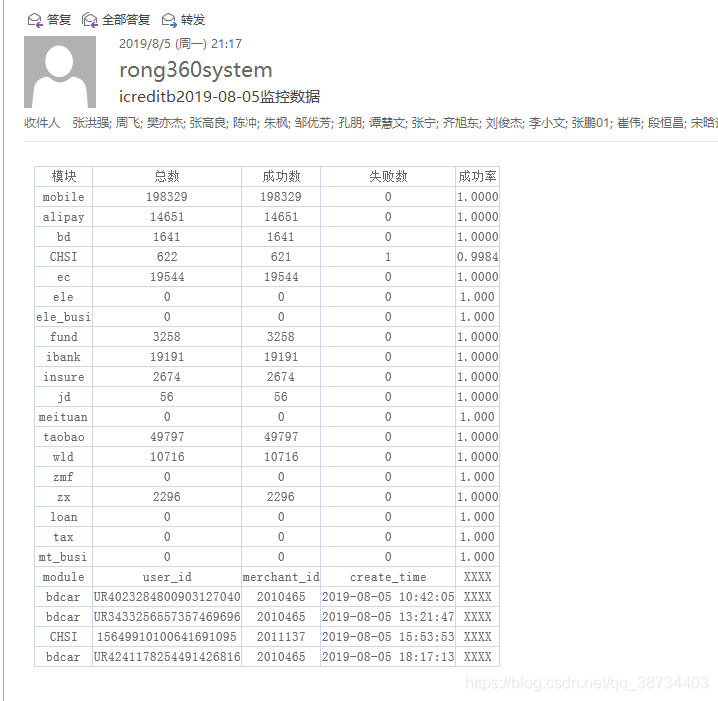
- 分表设计
Hbase
使用
// key = module_uniqName_subid_timestamp$rowkey = $data['model']."_".$data['md5'];//hbase2://co_protocol/protocol_timestamp_a4448a7f26968c0f66476c7527c2b946_1609810061453$rowkey = $data['model']."_".$data['md5']."_".intval(microtime(true)*1000);$column = array();$column['d:'.$data['model']] = $data['content'];$column['d:filetype'] = $data['filetype'];
rowkey(行主键) 列名 d:filetype 时间戳
- HBase表的存储结构模型,其中有4个字段。分别为Rowkey(主键)、Time Stamp(时间戳)、CF(列族)、CF:xx(列)。