@XF
2016-12-04T15:20:31.000000Z
字数 9527
阅读 111
第十次作业
作业
1、Abstract
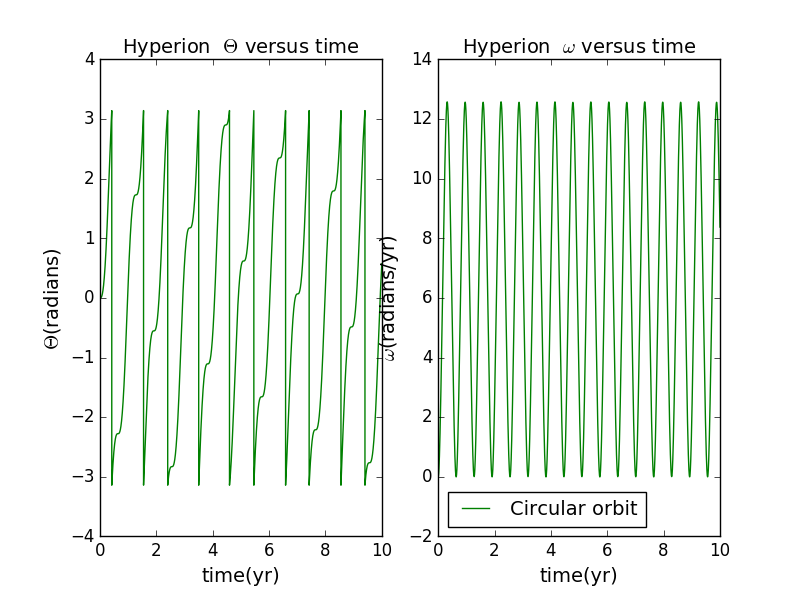
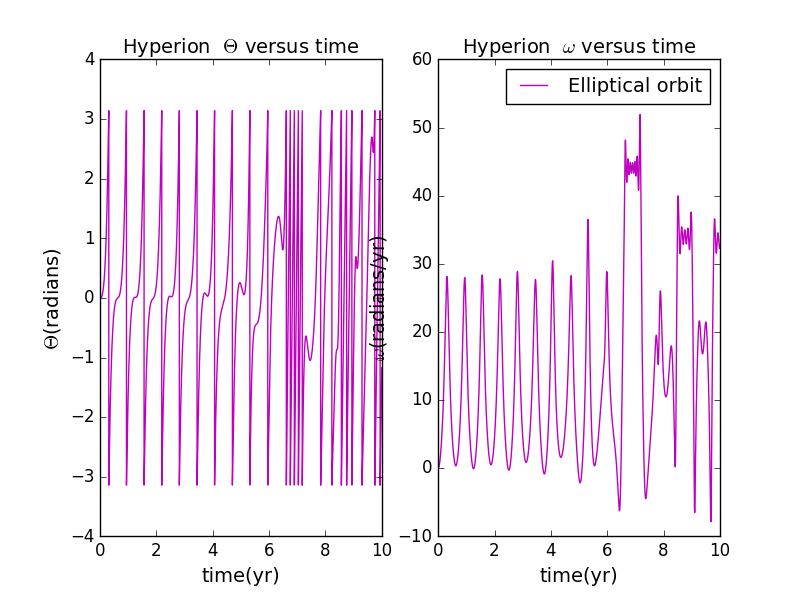
In this exercise, the motion of Hyperion will be discussed according to the instruction of Problem4.21.Hyperion, also known as Saturn VII,is distinguished by its irregular shape, chaotic rotation, and unexplained dumbball-like appearance.My work on Hyperion is just qualitative, aiming to show its chaotic during its orbit to Saturn.
2、Bankground
As we have known,Hyperion has an unusual shape,leading to its different behavior.Hyperion is shaped more like an egg and its orbit is choatic. We letbe the angle that the rod makes with the x axis and define the associated angular velocity.The center of the mass of the object isand.
After some algebra,we can obtain:
We can obtainby using
3.The Msin body
1.
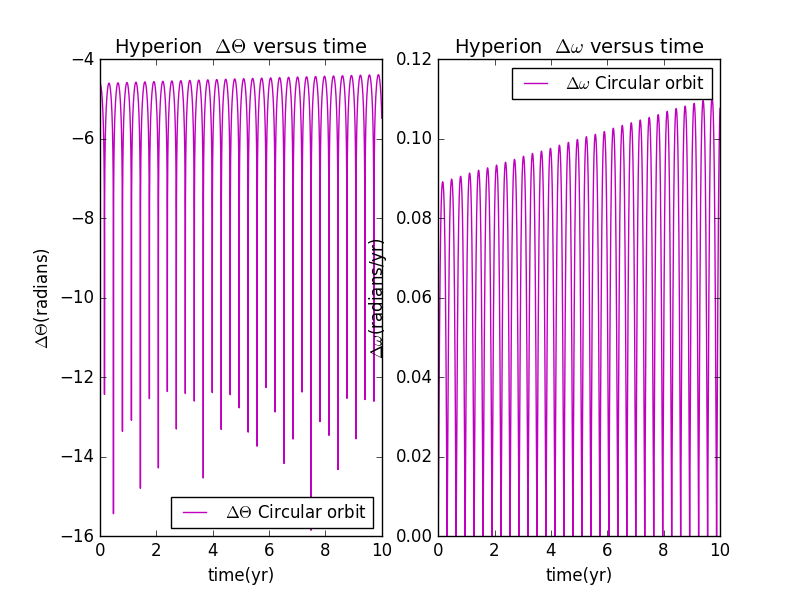
import matplotlib.pyplot as pltimport numpy as npimport mathclass hyperion:def __init__(self,GM=4*math.pi**2,dt=0.0001,time=10):self.GM=GMself.x=[1]self.y=[0]self.vx=[0]self.vy=[2*math.pi]self.dt=dtself.time=timeself.r=[math.sqrt(self.x[0]**2+self.y[0]**2)]self.t=[0]self.w=[0]self.theta=[0]def calculate(self):for i in range(int(self.time//self.dt)):self.vx.append(self.vx[i]-self.GM*self.x[i]*self.dt/self.r[i]**3)self.vy.append(self.vy[i]-self.GM*self.y[i]*self.dt/self.r[i]**3)self.x.append(self.x[i]+self.vx[i+1]*self.dt)self.y.append(self.y[i]+self.vy[i+1]*self.dt)self.r.append(math.sqrt(self.x[i+1]**2+self.y[i+1]**2))self.w.append(self.w[i]-3*self.GM/self.r[i]**5*(self.x[i]*math.sin(self.theta[i])-self.y[i]*math.cos(self.theta[i]))*(self.x[i]*math.cos(self.theta[i])+self.y[i]*math.sin(self.theta[i]))*self.dt)self.theta.append(self.theta[i]+self.w[i+1]*self.dt)self.t.append(self.t[i]+self.dt)if self.theta[i+1]<-math.pi:self.theta[i+1]=self.theta[i+1]+2*math.piif self.theta[i+1]>math.pi:self.theta[i+1]=self.theta[i+1]-2*math.pidef show_results(self,color):ax1=plt.subplot(121)ax2=plt.subplot(122)plt.sca(ax1)plt.plot(self.t,self.theta,'g',label=r'Circular orbit')plt.title(r'Hyperion $\Theta$ versus time',fontsize=14)plt.xlabel(u'time(yr)',fontsize=14)plt.ylabel(u'$\Theta$(radians)',fontsize=14)plt.sca(ax2)plt.plot(self.t,self.w,'g',label=r'Circular orbit')plt.title(r'Hyperion $\omega$ versus time',fontsize=14)plt.xlabel(u'time(yr)',fontsize=14)plt.ylabel(u'$\omega$(radians/yr)',fontsize=14)#plt.xlim(-1,1)#plt.ylim(-1,1)plt.legend(fontsize=14,loc='best')a=hyperion()a.calculate()a.show_results('g')plt.show()
2.
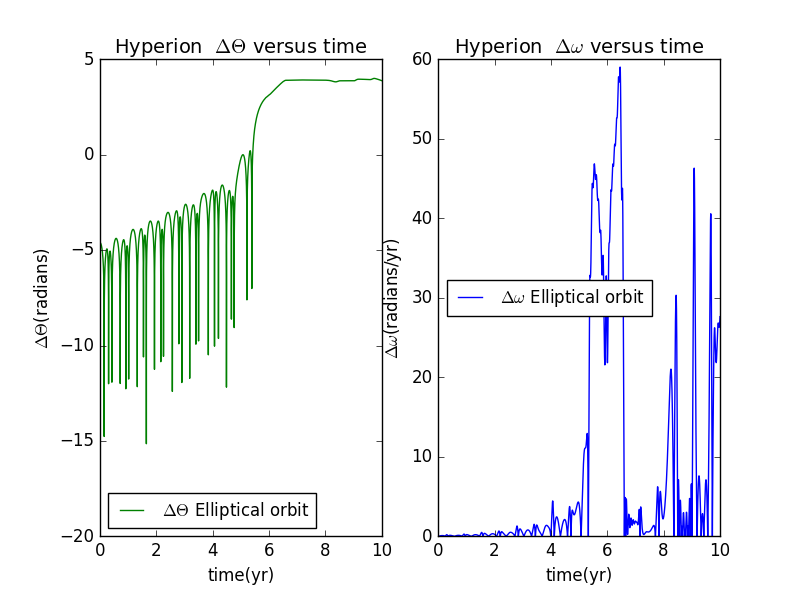
import matplotlib.pyplot as pltimport numpy as npimport mathclass hyperion:def __init__(self,GM=4*math.pi**2,dt=0.0001,time=10):self.GM=GMself.x=[1]self.y=[0]self.vx=[0]self.vy=[5]self.dt=dtself.time=timeself.r=[math.sqrt(self.x[0]**2+self.y[0]**2)]self.t=[0]self.w=[0]self.theta=[0]def calculate(self):for i in range(int(self.time//self.dt)):self.vx.append(self.vx[i]-self.GM*self.x[i]*self.dt/self.r[i]**3)self.vy.append(self.vy[i]-self.GM*self.y[i]*self.dt/self.r[i]**3)self.x.append(self.x[i]+self.vx[i+1]*self.dt)self.y.append(self.y[i]+self.vy[i+1]*self.dt)self.r.append(math.sqrt(self.x[i+1]**2+self.y[i+1]**2))self.w.append(self.w[i]-3*self.GM/self.r[i]**5*(self.x[i]*math.sin(self.theta[i])-self.y[i]*math.cos(self.theta[i]))*(self.x[i]*math.cos(self.theta[i])+self.y[i]*math.sin(self.theta[i]))*self.dt)self.theta.append(self.theta[i]+self.w[i+1]*self.dt)self.t.append(self.t[i]+self.dt)if self.theta[i+1]<-math.pi:self.theta[i+1]=self.theta[i+1]+2*math.piif self.theta[i+1]>math.pi:self.theta[i+1]=self.theta[i+1]-2*math.pidef show_results(self,color):ax1=plt.subplot(121)ax2=plt.subplot(122)plt.sca(ax1)plt.plot(self.t,self.theta,'m',label=r'Elliptical orbit')plt.title(r'Hyperion $\Theta$ versus time',fontsize=14)plt.xlabel(u'time(yr)',fontsize=14)plt.ylabel(u'$\Theta$(radians)',fontsize=14)plt.sca(ax2)plt.plot(self.t,self.w,'m',label=r'Elliptical orbit')plt.title(r'Hyperion $\omega$ versus time',fontsize=14)plt.xlabel(u'time(yr)',fontsize=14)plt.ylabel(u'$\omega$(radians/yr)',fontsize=14)#plt.xlim(-1,1)#plt.ylim(-1,1)plt.legend(fontsize=14,loc='best')a=hyperion()a.calculate()a.show_results('m')plt.show()
3.
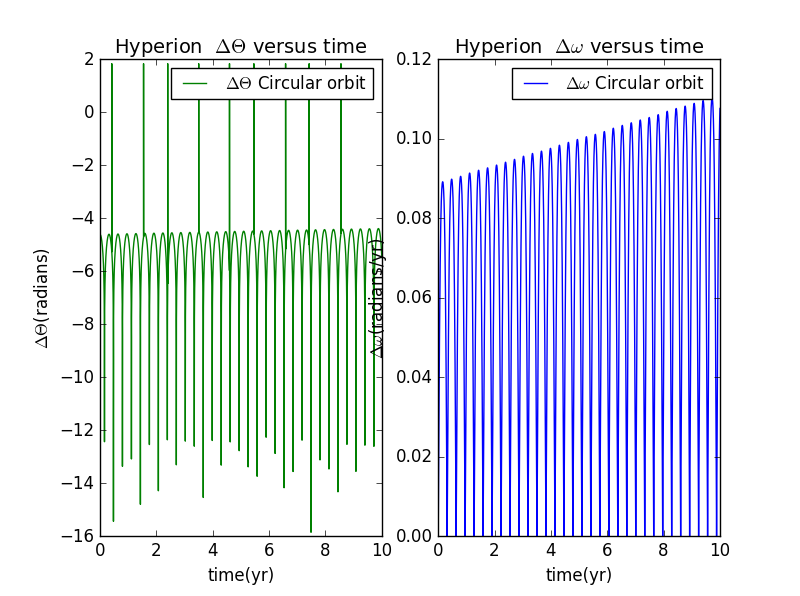
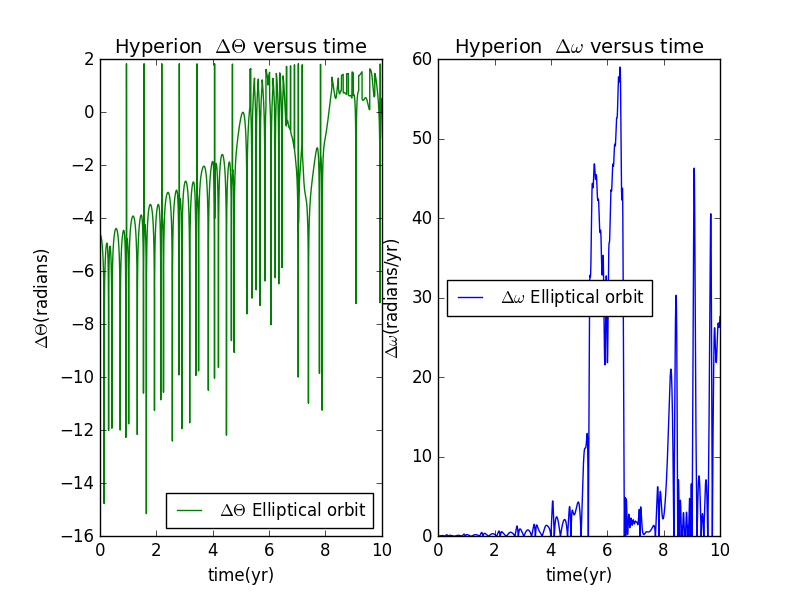
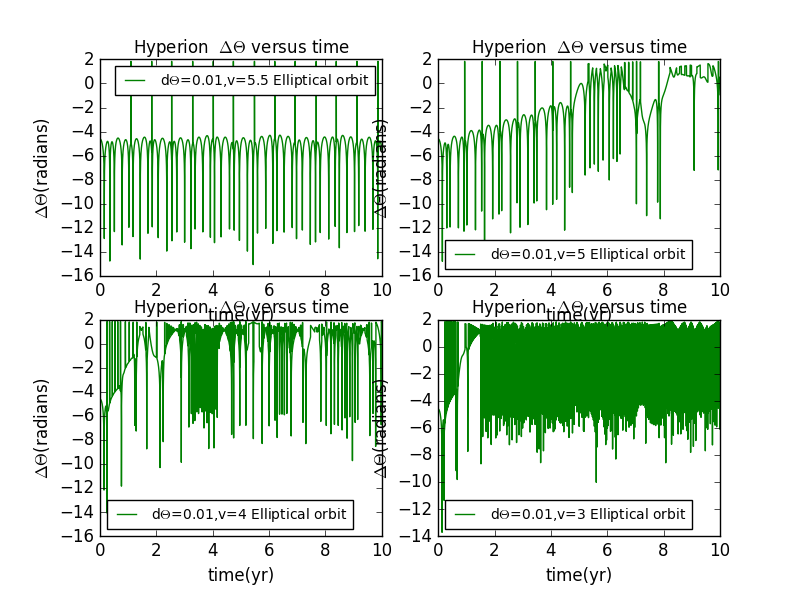
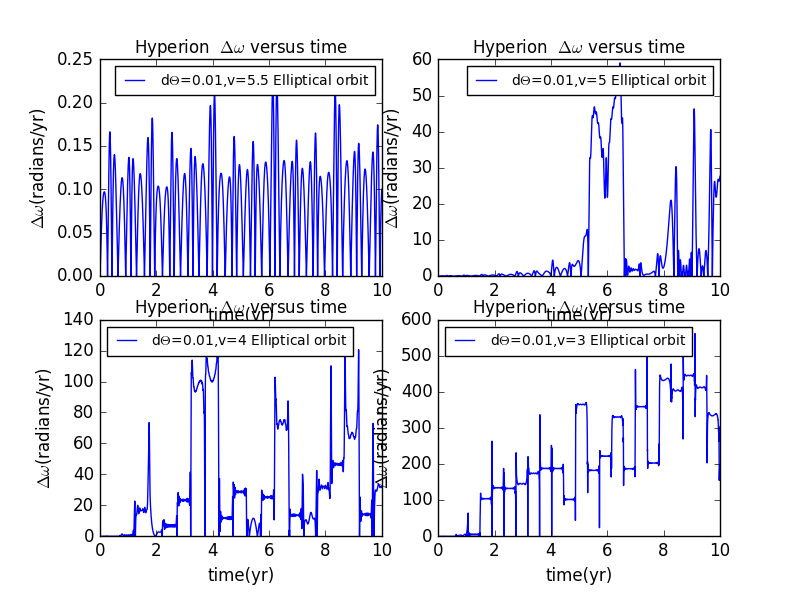
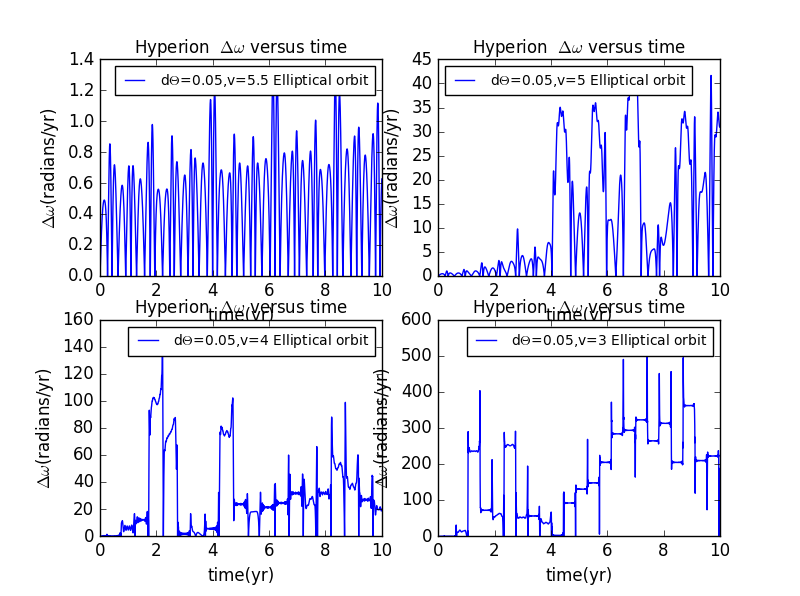
import matplotlib.pyplot as pltimport numpy as npimport mathclass hyperion:def __init__(self,GM=4*math.pi**2,dt=0.0001,time=10):self.GM=GMself.x=[[1],[1],[1],[1]]self.y=[[0],[0],[0],[0]]self.vx=[[0],[0],[0],[0]]self.vy=[[5.5],[5],[4],[3]]self.x1=[[1],[1],[1],[1]]self.y1=[[0],[0],[0],[0]]self.vx1=[[0],[0],[0],[0]]self.vy1=[[5.5],[5],[4],[3]]self.dt=dtself.time=timeself.r=[[math.sqrt(self.x[0][0]**2+self.y[0][0]**2)],[math.sqrt(self.x[1][0]**2+self.y[1][0]**2)],[math.sqrt(self.x[2][0]**2+self.y[2][0]**2)],[math.sqrt(self.x[3][0]**2+self.y[3][0]**2)]]self.t=[[0],[0],[0],[0]]self.w=[[0],[0],[0],[0]]self.theta=[[0.05],[0.05],[0.05],[0.05]]self.r1=[[math.sqrt(self.x1[0][0]**2+self.y1[0][0]**2)],[math.sqrt(self.x1[1][0]**2+self.y1[1][0]**2)],[math.sqrt(self.x1[2][0]**2+self.y1[2][0]**2)],[math.sqrt(self.x1[3][0]**2+self.y1[3][0]**2)]]self.t1=[[0],[0],[0],[0]]self.w1=[[0],[0],[0],[0]]self.theta1=[[0],[0],[0],[0]]self.d=[[math.log(abs(self.theta[0][0]-self.theta1[0][0]))],[math.log(abs(self.theta[1][0]-self.theta1[1][0]))],[math.log(abs(self.theta[2][0]-self.theta1[2][0]))],[math.log(abs(self.theta[3][0]-self.theta1[3][0]))]]self.dw=[[abs(self.w[0][0]-self.w1[0][0])],[abs(self.w[1][0]-self.w1[1][0])],[abs(self.w[2][0]-self.w1[2][0])],[abs(self.w[3][0]-self.w1[3][0])]]def calculate(self):for n in range(4):for i in range(int(self.time//self.dt)):self.vx[n].append(self.vx[n][i]-self.GM*self.x[n][i]*self.dt/self.r[n][i]**3)self.vy[n].append(self.vy[n][i]-self.GM*self.y[n][i]*self.dt/self.r[n][i]**3)self.x[n].append(self.x[n][i]+self.vx[n][i+1]*self.dt)self.y[n].append(self.y[n][i]+self.vy[n][i+1]*self.dt)self.r[n].append(math.sqrt(self.x[n][i+1]**2+self.y[n][i+1]**2))self.w[n].append(self.w[n][i]-3*self.GM/self.r[n][i]**5*(self.x[n][i]*math.sin(self.theta[n][i])-self.y[n][i]*math.cos(self.theta[n][i]))*(self.x[n][i]*math.cos(self.theta[n][i])+self.y[n][i]*math.sin(self.theta[n][i]))*self.dt)self.theta[n].append(self.theta[n][i]+self.w[n][i+1]*self.dt)self.t[n].append(self.t[n][i]+self.dt)if self.theta[n][i+1]<-math.pi:self.theta[n][i+1]=self.theta[n][i+1]+2*math.piif self.theta[n][i+1]>math.pi:self.theta[n][i+1]=self.theta[n][i+1]-2*math.piself.vx1[n].append(self.vx1[n][i]-self.GM*self.x1[n][i]*self.dt/self.r1[n][i]**3)self.vy1[n].append(self.vy1[n][i]-self.GM*self.y1[n][i]*self.dt/self.r1[n][i]**3)self.x1[n].append(self.x1[n][i]+self.vx1[n][i+1]*self.dt)self.y1[n].append(self.y1[n][i]+self.vy1[n][i+1]*self.dt)self.r1[n].append(math.sqrt(self.x1[n][i+1]**2+self.y1[n][i+1]**2))self.w1[n].append(self.w1[n][i]-3*self.GM/self.r1[n][i]**5*(self.x1[n][i]*math.sin(self.theta1[n][i])-self.y1[n][i]*math.cos(self.theta1[n][i]))*(self.x1[n][i]*math.cos(self.theta1[n][i])+self.y1[n][i]*math.sin(self.theta1[n][i]))*self.dt)self.theta1[n].append(self.theta1[n][i]+self.w1[n][i+1]*self.dt)self.t1[n].append(self.t1[n][i]+self.dt)if self.theta1[n][i+1]<-math.pi:self.theta1[n][i+1]=self.theta1[n][i+1]+2*math.piif self.theta1[n][i+1]>math.pi:self.theta1[n][i+1]=self.theta1[n][i+1]-2*math.piself.d[n].append(math.log(abs(self.theta[n][i]-self.theta1[n][i])))self.dw[n].append(abs(self.w[n][i]-self.w1[n][i]))def show_results(self,color):ax1=plt.subplot(221)ax2=plt.subplot(222)ax3=plt.subplot(223)ax4=plt.subplot(224)plt.sca(ax1)plt.plot(self.t[0],self.d[0],'g',label=r'd$\Theta$=0.05,v=5.5 Elliptical orbit')#plt.plot(self.t[0],self.dw[0],'b',label=r'd$\Theta$=0.05,v=5.5 Elliptical orbit')plt.title(r'Hyperion $\Delta{\Theta}$ versus time',fontsize=12)#plt.title(r'Hyperion $\Delta{\omega}$ versus time',fontsize=12)plt.xlabel(u'time(yr)',fontsize=12)plt.ylabel(u'$\Delta{\Theta}$(radians)',fontsize=12)#plt.ylabel(u'$\Delta{\omega}$(radians/yr)',fontsize=12)plt.legend(fontsize=10,loc='best')plt.sca(ax2)plt.plot(self.t[1],self.d[1],'g',label=r'd$\Theta$=0.05,v=5 Elliptical orbit')#plt.plot(self.t[1],self.dw[1],'b',label=r'd$\Theta$=0.05,v=5 Elliptical orbit')plt.title(r'Hyperion $\Delta{\Theta}$ versus time',fontsize=12)#plt.title(r'Hyperion $\Delta{\omega}$ versus time',fontsize=12)plt.xlabel(u'time(yr)',fontsize=12)plt.ylabel(u'$\Delta{\Theta}$(radians)',fontsize=12)#plt.ylabel(u'$\Delta{\omega}$(radians/yr)',fontsize=12)plt.legend(fontsize=10,loc='best')plt.sca(ax3)plt.plot(self.t[2],self.d[2],'g',label=r'd$\Theta$=0.05,v=4 Elliptical orbit')#plt.plot(self.t[2],self.dw[2],'b',label=r'd$\Theta$=0.05,v=4 Elliptical orbit')plt.title(r'Hyperion $\Delta{\Theta}$ versus time',fontsize=12)#plt.title(r'Hyperion $\Delta{\omega}$ versus time',fontsize=12)plt.xlabel(u'time(yr)',fontsize=12)plt.ylabel(u'$\Delta{\Theta}$(radians)',fontsize=12)#plt.ylabel(u'$\Delta{\omega}$(radians/yr)',fontsize=12)plt.legend(fontsize=10,loc='best')plt.sca(ax4)plt.plot(self.t[3],self.d[3],'g',label=r'd$\Theta$=0.05,v=3 Elliptical orbit')#plt.plot(self.t[3],self.dw[3],'b',label=r'd$\Theta$=0.05,v=3 Elliptical orbit')plt.title(r'Hyperion $\Delta{\Theta}$ versus time',fontsize=12)#plt.title(r'Hyperion $\Delta{\omega}$ versus time',fontsize=12)plt.xlabel(u'time(yr)',fontsize=12)plt.ylabel(u'$\Delta{\Theta}$(radians)',fontsize=12)#plt.ylabel(u'$\Delta{\omega}$(radians/yr)',fontsize=12)plt.legend(fontsize=10,loc='best')a=hyperion()a.calculate()a.show_results('b')plt.show()
4. Conclusion
for circular and elliptical orbit,reset
and for circular and elliptical orbit reset
not keepin range fromtofor circular and elliptical orbit
change the initial conditions
,change the initial velocity
,change the initial velocity

5 Thanks
感谢杜威同学的帮助!
