@haozhihao
2017-11-15T10:36:18.000000Z
字数 480
阅读 9123
安川伺服电机驱动器SGD7S使用
伺服
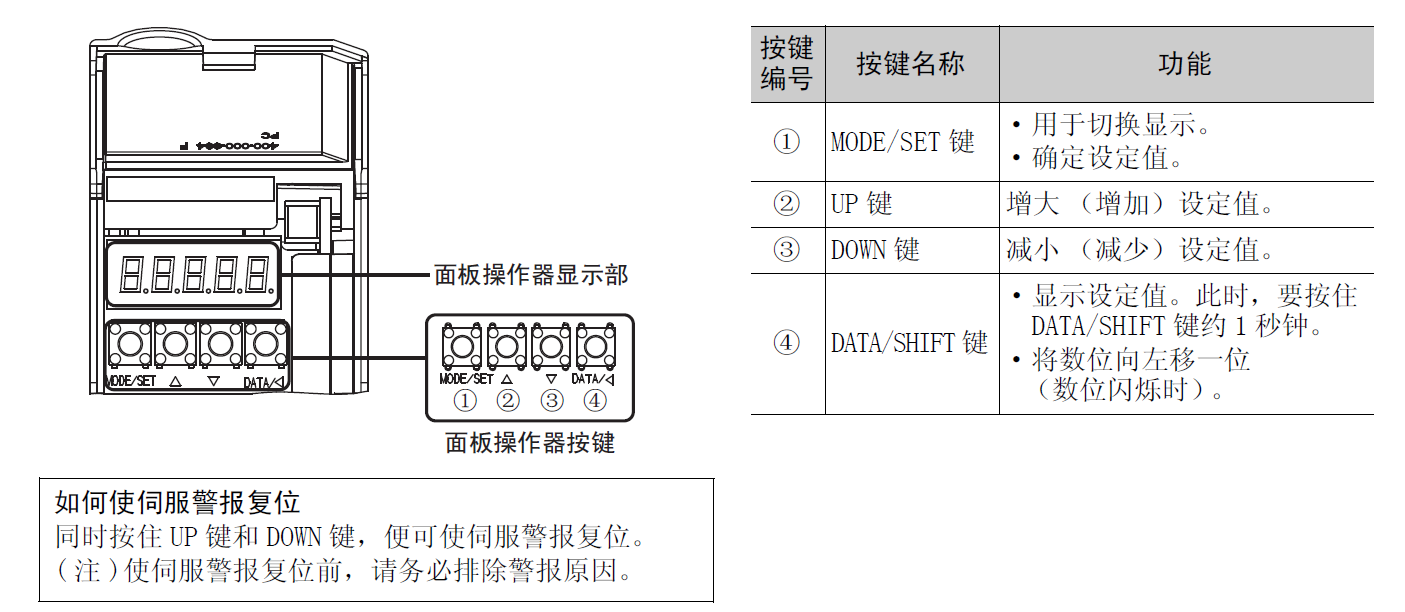
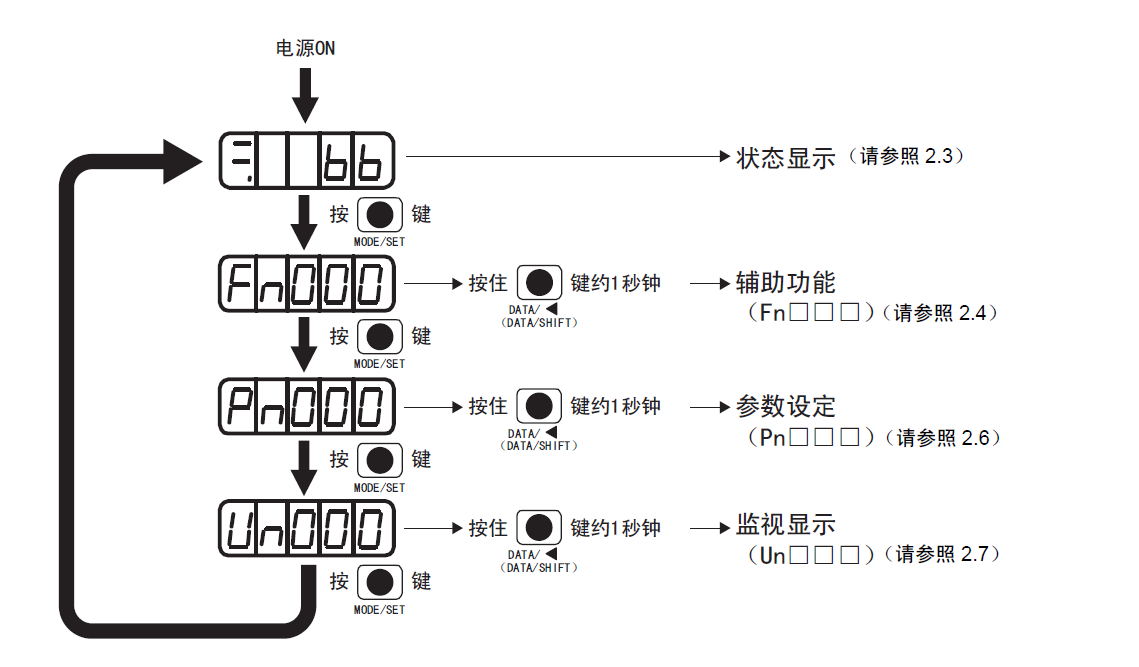
操作面板使用
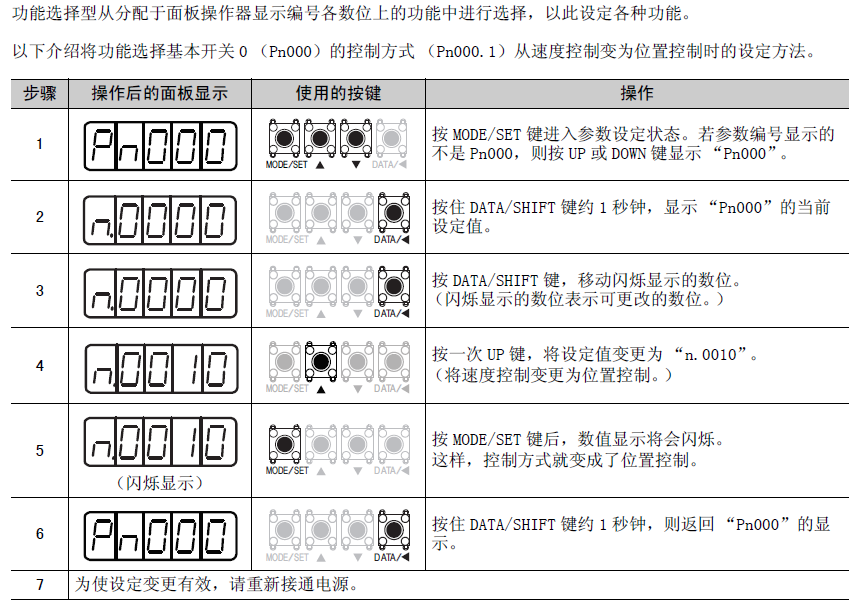
采用单相200V电源输入时参数设置

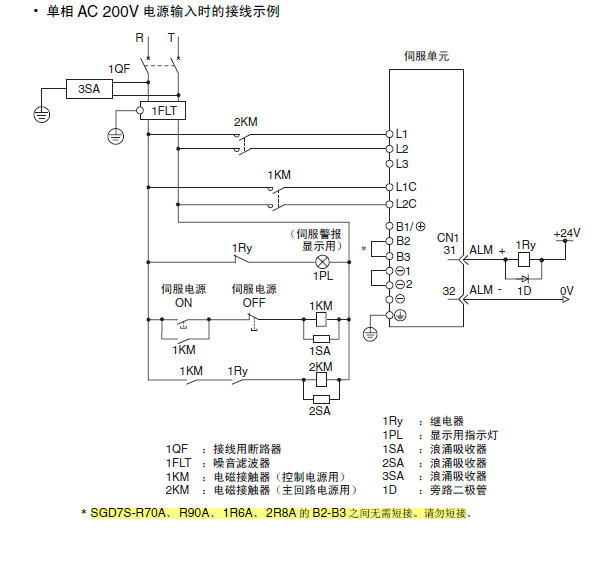
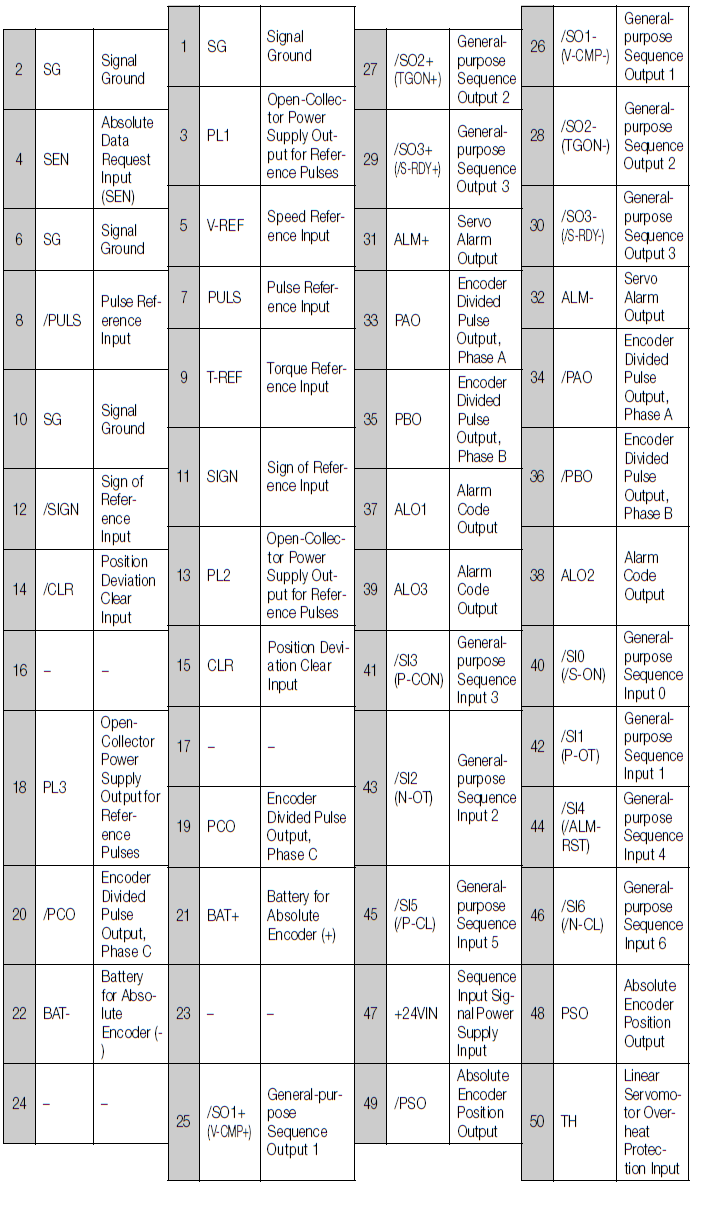
伺服驱动器示意图

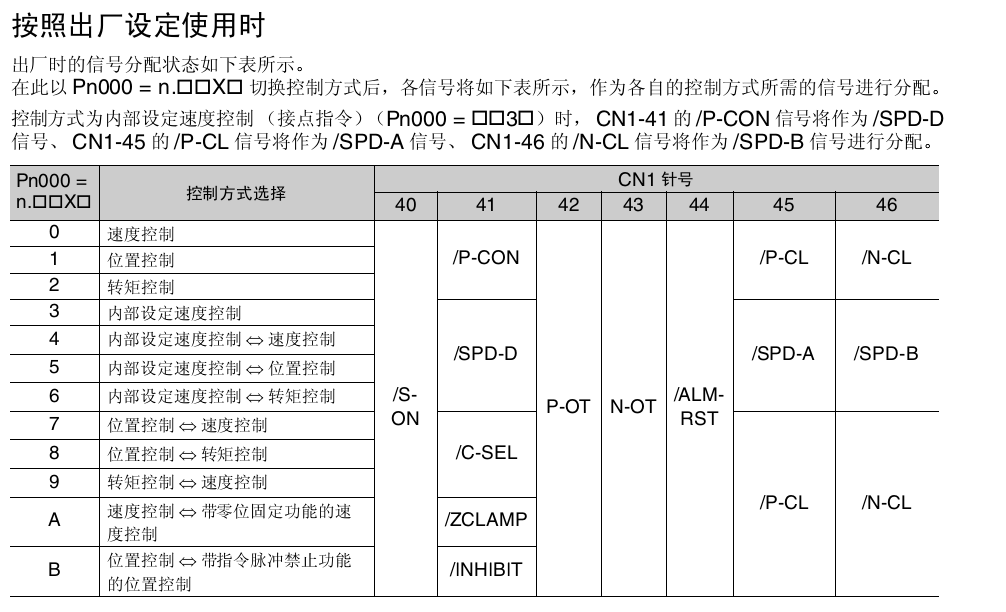
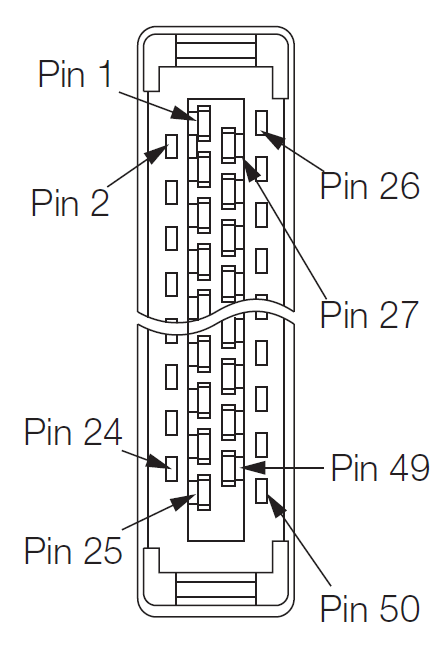
其中CN1对应的是输入输出信号端子
| 端子 | 输入信号 | 功能 |
|---|---|---|
| CN1-40 | /S-ON | 伺服开信号输入1(ON)伺服电机开,0(OFF)伺服电机关 |
| CN1-44 | /ALM-RST | 报警复位,将输入信号置位1 |
| CN1-42 | P-OT | 正转驱动(ON)禁止正传驱动(OFF) |
| CN1-43 | N-OT | 反转驱动(ON)禁止反转驱动(OFF) |
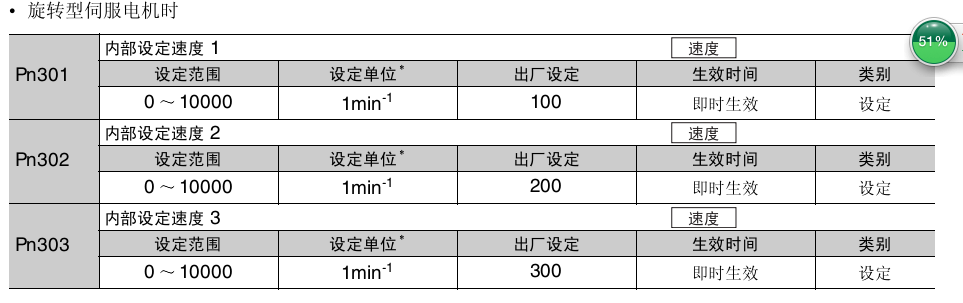
运行前的参数设置

位置控制是通过上位装置将脉冲串指令输入伺服单元,移动至目标位置的控制。以输入脉冲数来控制位置,以输入脉冲的频率来控制速度。用于需要定位动作的场合
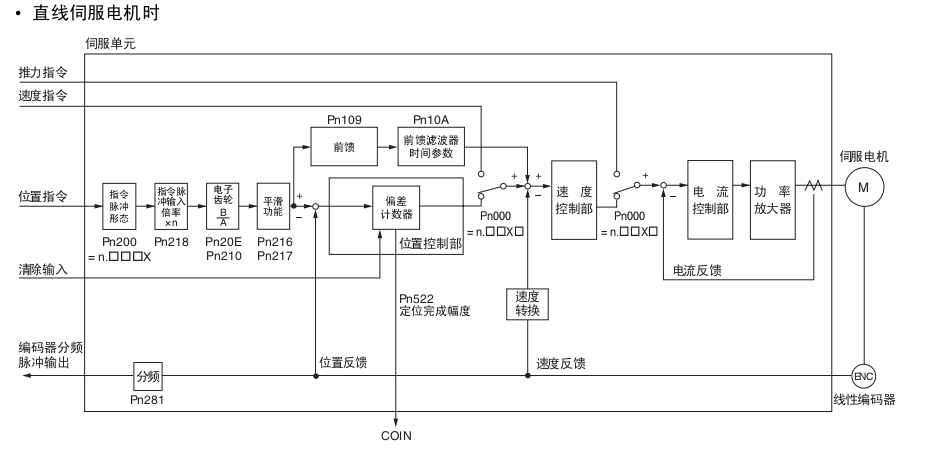
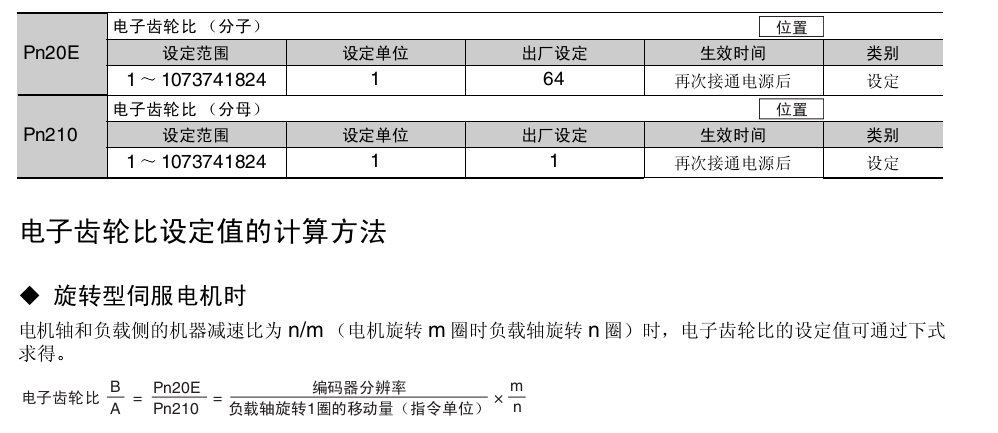
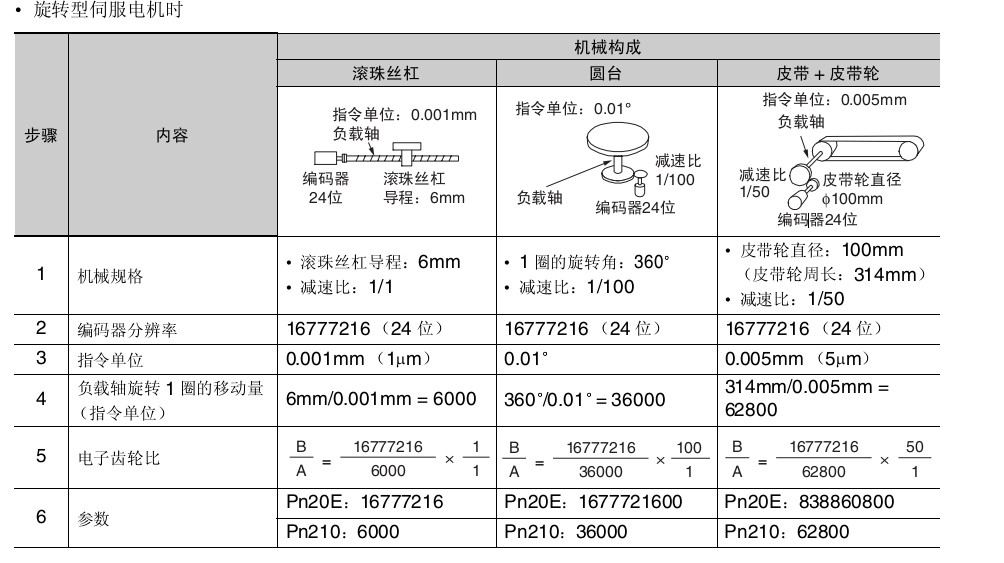
其中指令脉冲输入倍率和电子齿轮比代表意思
PLC给伺服放大器发的脉冲数/电机每转×电子齿轮比=伺服电机实际需要脉冲数/电机每转
每转脉冲数=伺服电机每转的分辨率
指令脉冲输入倍率=使输入伺服单元的指令脉冲数倍增的乘数
指令单位是指使负载移动的位置数据的最小单位。指令单位是将移动量转换成易懂的距离等物理量单位 (例如 µm 及°等),而不是转换成脉冲
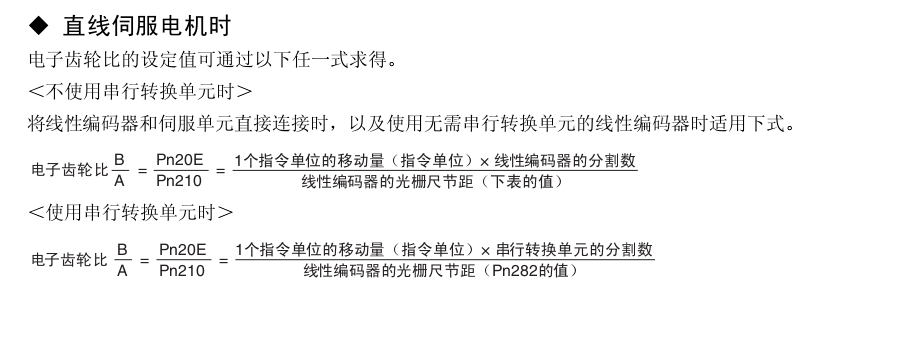
电子齿轮是将按照指令单位指定的移动量转换成实际移动所需脉冲数的功能