@hanxiaoyang
2016-07-22T16:38:57.000000Z
字数 9282
阅读 9267
斯坦福CS231n学习笔记(8)神经网络训练与注意点
CS231n
作者:寒小阳
时间:2016年1月。
出处:http://blog.csdn.net/han_xiaoyang/article/details/50521064
声明:版权所有,转载请联系作者并注明出处
1.训练
在前一节当中我们讨论了神经网络静态的部分:包括神经网络结构、神经元类型、数据部分、损失函数部分等。这个部分我们集中讲讲动态的部分,主要是训练的事情,集中在实际工程实践训练过程中要注意的一些点,如何找到最合适的参数。
1.1 关于梯度检验
之前的博文我们提到过,我们需要比对数值梯度和解析法求得的梯度,实际工程中这个过程非常容易出错,下面提一些小技巧和注意点:
使用中心化公式,这一点我们之前也说过,使用如下的数值梯度计算公式:
而不是
即使看似上面的形式有着2倍的计算量,但是如果你有兴趣用把公式中的和做泰勒展开的话,你会发现上面公式出错率大概是级别的,而下面公式则是,注意到
h是很小的数,因此显然上面的公式要精准得多。使用相对误差做比较,这是实际工程中需要提到的另外一点,在我们得到数值梯度和解析梯度之后,我们如何去比较两者?第一反应是作差对吧,或者顶多求一个平方。但是用绝对值是不可靠的,假如两个梯度的绝对值都在1.0左右,那么我们可以认为1e-4这样一个差值是非常小的,但是如果两个梯度本身就是1e-4级别的,那这个差值就相当大了。所以我们考虑相对误差:
加max项的原因很简单:整体形式变得简单和对称。再提个小醒,别忘了避开分母中两项都为0的情况。对于相对误差而言:
- 意味着你的实现肯定是有问题的
- ,你会有点担心
- ,基本是OK的,但是要注意极端情况(使用tanh或者softmax时候出现kinks)那还是太大
- ,放心大胆使用
哦,对了,还有一点我们需要知道的,随着神经网络层数增多,相对误差是会增大的。这意味着,对于10层的神经网络,其实相对误差也许在1e-2级别就已经是可以正常使用的了。
使用双精度浮点数。如果你使用单精度浮点数计算,那你的实现可能一点问题都没有,但是相对误差却很大。实际工程中出现过,从单精度切到双精度,相对误差立马从1e-2降到1e-8的情况。
要留意浮点数的范围。一篇很好的文章是What Every Computer Scientist Should Know About Floating-Point Arithmetic。我们得保证计算时,所有的数都在浮点数的可计算范围内,太小的值(比如h)会带来计算上的问题。
Kinks。它指的是一种会导致数值梯度和解析梯度不一致的情况。会出现在使用ReLU或者类似的神经单元上时,对于很小的负数,比如x=-1e-6,因为x<0,所以解析梯度是绝对为0的,但是对于数值梯度而言,加入你计算,取的h>1e-6,那就跳到大于0的部分了,这样数值梯度就一定和解析梯度不一样了。而且这个并不是极端情况哦,对于一个像CIFAR-10这样级别的数据集,因为有50000个样本,同时每个样本会对应9个错误的类别(给损失函数贡献9个loss值),会有450000个,会出现很多的kinks。
不过我们可以监控里的2项,比较大的那项如果存在跃过0的情况,那就要注意了。
设定步长h要小心。h肯定不能特别大,这个大家都知道对吧。但我并不是说h要设定的非常小,其实h设定的非常小也会有问题,因为h太小程序可能会有精度问题。很有意思的是,有时候在实际情况中h如果从非常小调为1e-4或者1e-6反倒会突然计算变得正常。
不要让正则化项盖过数据项。有时候会出现这个问题,因为损失函数是数据损失部分与正则化部分的求和。因此要特别注意正则化部分,你可以想象下,如果它盖过了数据部分,那么主要的梯度来源于正则化项,那这样根本就做不到正常的梯度回传和参数迭代更新。所以即使在检查数据部分的实现是否正确,也得先关闭正则化部分(系数设为0),再检查。
注意dropout和其他参数。在检查数值梯度和解析梯度的时候,如果不把dropout和其他参数都『关掉』的话,两者之间是一定会有很大差值的。不过『关掉』它们的负面影响是,没有办法检查这些部分的梯度是否正确。所以,一个合理的方式是,在计算和之前,随机初始化x,然后再计算解析梯度。
关于只检查几个维度。在实际情况中,梯度可能有上百万维参数。因此每个维度都检查一遍就不太现实了,一般都是只检查一些维度,然后假定其他的维度也都正确。要小心一点:要保证这些维度的每个参数都检查对比过了。
1.2 训练前的检查工作
在开始训练之前,我们还得做一些检查,来确保不会运行了好一阵子,才发现计算代价这么大的训练其实并不正确。
在初始化之后看一眼loss。其实我们在用很小的随机数初始化神经网络后,第一遍计算loss可以做一次检查(当然要记得把正则化系数设为0)。以CIFAR-10为例,如果使用Softmax分类器,我们预测应该可以拿到值为2.302左右的初始loss(因为10个类别,初始概率应该都为0.1,Softmax损失是-log(正确类别的概率):-ln(0.1)=2.302)。
加回正则项,接着我们把正则化系数设为正常的小值,加回正则化项,这时候再算损失/loss,应该比刚才要大一些。
试着去拟合一个小的数据集。最后一步,也是很重要的一步,在对大数据集做训练之前,我们可以先训练一个小的数据集(比如20张图片),然后看看你的神经网络能够做到0损失/loss(当然,是指的正则化系数为0的情况下),因为如果神经网络实现是正确的,在无正则化项的情况下,完全能够过拟合这一小部分的数据。
1.3 训练过程中的监控
开始训练之后,我们可以通过监控一些指标来了解训练的状态。我们还记得有一些参数是我们认为敲定的,比如学习率,比如正则化系数。
- 损失/loss随每轮完整迭代后的变化
下面这幅图表明了不同的学习率下,我们每轮完整迭代(这里的一轮完整迭代指的是所有的样本都被过了一遍,因为随机梯度下降中batch size的大小设定可能不同,因此我们不选每次mini-batch迭代为周期)过后的loss应该呈现的变化状况:
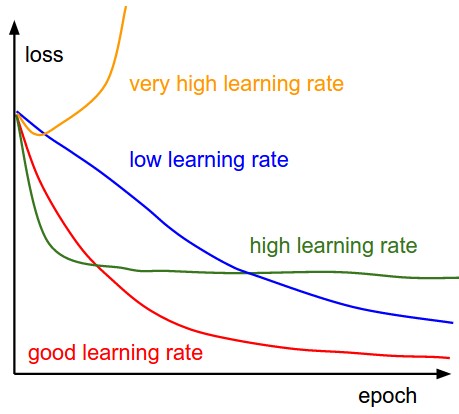
合适的学习率可以保证每轮完整训练之后,loss都减小,且能在一段时间后降到一个较小的程度。太小的学习率下loss减小的速度很慢,如果太激进,设置太高的学习率,开始的loss减小速度非常可观,可是到了某个程度之后就不再下降了,在离最低点一段距离的地方反复,无法下降了。下图是实际训练CIFAR-10的时候,loss的变化情况:
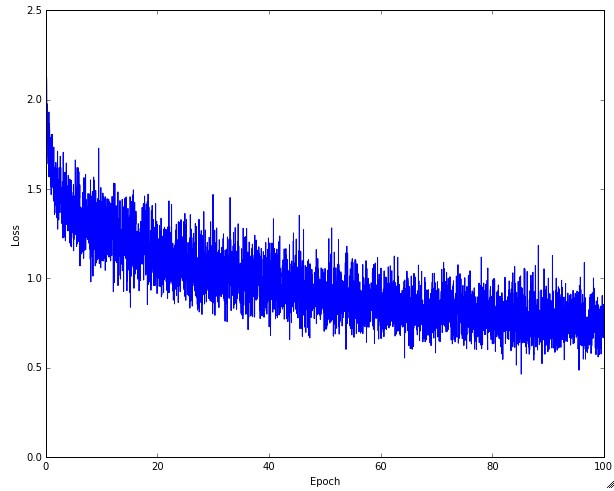
大家可能会注意到上图的曲线有一些上下跳动,不稳定,这和随机梯度下降时候设定的batch size有关系。batch size非常小的情况下,会出现很大程度的不稳定,如果batch size设定大一些,会相对稳定一点。
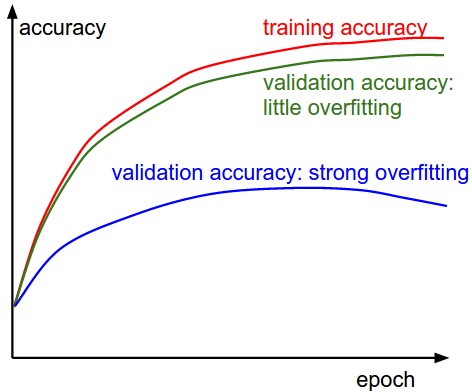
- 训练集/验证集上的准确度
然后我们需要跟踪一下训练集和验证集上的准确度状况,以判断分类器所处的状态(过拟合程度如何):
- 权重:权重更新部分 的比例
最后一个需要留意的量是权重更新幅度和当前权重幅度的比值。注意哦,是权重更新部分,不一定是计算出来的梯度哦(比如训练用的vanilla sgd,那这个值就是梯度和学习率的乘积)。最好对于每组参数都独立地检查这个比例。我们没法下定论,但是在之前的工程实践中,一个合适的比例大概是1e-3。如果你得到的比例比这个值小很多,那么说明学习率设定太低了,反之则是设定太高了。
- 每一层的 激励/梯度值 分布
如果参数初始化不正确,那整个训练过程会越来越慢,甚至直接停掉。不过我们可以很容易发现这个问题。表现最明显的数据是每一层的激励和梯度的方差(波动状况)。举个例子说,如果初始化不正确,很有可能从前到后逐层的激励(激励函数的输入部分)方差变化是如下的状况:
# 我们用标准差为0.01均值为0的高斯分布值来初始化权重(这不合理)Layer 0: Variance: 1.005315e+00Layer 1: Variance: 3.123429e-04Layer 2: Variance: 1.159213e-06Layer 3: Variance: 5.467721e-10Layer 4: Variance: 2.757210e-13Layer 5: Variance: 3.316570e-16Layer 6: Variance: 3.123025e-19Layer 7: Variance: 6.199031e-22Layer 8: Variance: 6.623673e-25
大家看一眼上述的数值,就会发现,从前往后,激励值波动逐层降得非常厉害,这也就意味着反向算法中,计算回传梯度的时候,梯度都要接近0了,因此参数的迭代更新几乎就要衰减没了,显然不太靠谱。我们按照上一讲中提到的方式正确初始化权重,再逐层看激励/梯度值的方差,会发现它们的方差衰减没那么厉害,近似在一个级别:
# 重新正确设定权重:Layer 0: Variance: 1.002860e+00Layer 1: Variance: 7.015103e-01Layer 2: Variance: 6.048625e-01Layer 3: Variance: 8.517882e-01Layer 4: Variance: 6.362898e-01Layer 5: Variance: 4.329555e-01Layer 6: Variance: 3.539950e-01Layer 7: Variance: 3.809120e-01Layer 8: Variance: 2.497737e-01
再看逐层的激励波动情况,你会发现即使到最后一层,网络也还是『活跃』的,意味着反向传播中回传的梯度值也是够的,神经网络是一个积极learning的状态。
- 首层的可视化
最后再提一句,如果神经网络是用在图像相关的问题上,那么把首层的特征和数据画出来(可视化)可以帮助我们了解训练是否正常:

上图的左右是一个正常和不正常情况下首层特征的可视化对比。左边的图中特征噪点较多,图像很『浑浊』,预示着可能训练处于『病态』过程:也许是学习率设定不正常,或者正则化系数设定太低了,或者是别的原因,可能神经网络不会收敛。右边的图中,特征很平滑和干净,同时相互间的区分度较大,这表明训练过程比较正常。
1.4 关于参数更新部分的注意点
当我们确信解析梯度实现正确后,那就该在后向传播算法中使用它更新权重参数了。就单参数更新这个部分,也是有讲究的:
说起来,神经网络的最优化这个子话题在深度学习研究领域还真是很热。下面提一下大神们的论文中提到的方法,很多在实际应用中还真是很有效也很常用。
1.4.1 随机梯度下降与参数更新
vanilla update
这是最简单的参数更新方式,拿到梯度之后,乘以设定的学习率,用现有的权重减去这个部分,得到新的权重参数(因为梯度表示变化率最大的增大方向,减去这个值之后,损失函数值才会下降)。记x为权重参数向量x,而梯度为dx,然后我们设定学习率为learning_rate,则最简单的参数更新大家都知道:
# Vanilla updatex += - learning_rate * dx
当然learning_rate是我们自己敲定的一个超变量值(在该更新方法中是全程不变的),而且数学上可以保证,当学习率足够低的时候,经这个过程迭代后,损失函数不会增加。
Momentum update
这是上面参数更新方法的一种小小的优化,通常说来,在深层次的神经网络中,收敛效率更高一些(速度更快)。这种参数更新方式源于物理学角度的优化。
# 物理动量角度启发的参数更新v = mu * v - learning_rate * dx # 合入一部分附加速度x += v # 更新参数
这里v是初始化为0的一个值,mu是我们敲定的另外一个超变量(最常见的设定值为0.9,物理含义和摩擦力系数相关),一个比较粗糙的理解是,(随机)梯度下降可以看做从山上下山到山底的过程,这种方式,相当于在下山的过程中,加上了一定的摩擦阻力,消耗掉一小部分动力系统的能量,这样会比较高效地在山底停住,而不是持续震荡。对了,其实我们也可以用交叉验证来选择最合适的mu值,一般我们会从[0.5, 0.9, 0.95, 0.99]里面选出最合适的。
Nesterov Momentum
这是momentum update的一个不同的版本,最近也用得很火。据称,这种参数更新方法,有更好的凸函数和凸优化理论基础,而实际中的收敛效果也略优于momentum update。
此处的深层次原理,博主表示智商有点捉急...有兴趣的同学可以看看以下的2个材料:
- Yoshua Bengio大神的Advances in optimizing Recurrent Networks3.5节
- Ilya Sutskever's thesis7.2节
它的思想对应着如下的代码:
x_ahead = x + mu * v# 考虑到这个时候的x已经有一些变化了v = mu * v - learning_rate * dx_aheadx += v
工程上更实用的一个版本是:
v_prev = v # 当前状态先存储起来v = mu * v - learning_rate * dx # 依旧按照Momentum update的方式更新x += -mu * v_prev + (1 + mu) * v # 新的更新方式
1.4.2 衰减学习率
在实际训练过程中,随着训练过程推进,逐渐衰减学习率是很有必要的。我们继续回到下山的场景中,刚下山的时候,可能离最低点很远,那我步子迈大一点也没什么关系,可是快到山脚了,我还激进地大步飞奔,一不小心可能就迈过去了。所以还不如随着下山过程推进,逐步减缓一点点步伐。不过这个『火候』确实要好好把握,衰减太慢的话,最低段震荡的情况依旧;衰减太快的话,整个系统下降的『动力』衰减太快,很快就下降不动了。下面提一些常见的学习率衰减方式:
- 步伐衰减:这是很常见的一个衰减模式,每过一轮完整的训练周期(所有的图片都过了一遍)之后,学习率下降一些。比如比较常见的一个衰减率可能是每20轮完整训练周期,下降10%。不过最合适的值还真是依问题不同有变化。如果你在训练过程中,发现交叉验证集上呈现很高的错误率,还一直不下降,你可能就可以考虑考虑调整一下(衰减)学习率了。
- 指数级别衰减:数学形式为,其中是需要自己敲定的超参数,是迭代轮数。
- 1/t衰减:有着数学形式为的衰减模式,其中是需要自己敲定的超参数,是迭代轮数。
实际工程实践中,大家还是更倾向于使用步伐衰减,因为它包含的超参数少一些,计算简单一些,可解释性稍微高一点。
1.4.3 二次迭代方法
最优化问题里还有一个非常有名的牛顿法,它按照如下的方式进行迭代更新参数:
这里的是Hessian矩阵,是函数的二阶偏微分。而和梯度下降里看到的一样,是一个梯度向量。直观理解是Hessian矩阵描绘出了损失函数的曲度,因此能让我们更高效地迭代和靠近最低点:乘以Hessian矩阵进行参数迭代会让在曲度较缓的地方,会用更激进的步长更新参数,而在曲度很陡的地方,步伐会放缓一些。因此相对一阶的更新算法,在这点上它还是有很足的优势的。
比较尴尬的是,实际深度学习过程中,直接使用二次迭代的方法并不是很实用。原因是直接计算Hessian矩阵是一个非常耗时耗资源的过程。举个例子说,一个一百万参数的神经网络的Hessian矩阵维度为[1000000*1000000],算下来得占掉3725G的内存。当然,我们有L-BFGS这种近似Hessian矩阵的算法,可以解决内存问题。但是L-BFGS一般在全部数据集上计算,而不像我们用的mini-batch SGD一样在小batch上迭代。现在有很多人在努力研究这个问题,试图让L-BFGS也能以mini-batch的方式稳定迭代更新。但就目前而言,大规模数据上的深度学习很少用到L-BFGS或者类似的二次迭代方法,倒是随机梯度下降这种简单的算法被广泛地使用着。
感兴趣的同学可以参考以下文献:
- On Optimization Methods for Deep Learning:2011年的论文比较随机梯度下降和L-BFGS
- Large Scale Distributed Deep Networks:google brain组的论文,比较随机梯度下降和L-BFGS在大规模分布式优化上的差别。
- SFO算法试图结合随机梯度下降和L-BFGS的优势。
1.4.4 逐参更新学习率
到目前为止大家看到的学习率更新方式,都是全局使用同样的学习率。调整学习率是一件很费时同时也容易出错的事情,因此大家一直希望有一种学习率自更新的方式,甚至可以细化到逐参数更新。现在确实有一些这种方法,其中大多数还需要额外的超参数设定,优势是在大多数超参数设定下,效果都比使用写死的学习率要好。下面稍微提一下常见的自适应方法(原谅博主底子略弱,没办法深入数学细节讲解):
Adagrad是Duchi等在论文Adaptive Subgradient Methods for Online Learning and Stochastic Optimization中提出的自适应学习率算法。简单代码实现如下:
# 假定梯度为dx,参数向量为xcache += dx**2x += - learning_rate * dx / np.sqrt(cache + 1e-8)
其中变量cache有着和梯度一样的维度,然后我们用这个变量持续累加梯度平方。之后这个值被用作参数更新步骤中的归一化。这种方法的好处是,对于高梯度的权重,它们的有效学习率被降低了;而小梯度的权重迭代过程中学习率提升了。而分母开根号这一步非常重要,不开根号的效果远差于开根号的情况。平滑参数1e-8避免了除以0的情况。
RMSprop是一种非常有效,然而好像还没有被公开发布的自适应学习率更新方法。有意思的是,现在使用这个方法的人,都引用的大神Geoff Hinton的coursera课程第6节的讲义第29页。RMSProp方法对Adagrad算法做了一个简单的优化,以减缓它的迭代强度,它开方的部分cache做了一个平滑处理,大致的示意代码如下:
cache = decay_rate * cache + (1 - decay_rate) * dx**2x += - learning_rate * dx / np.sqrt(cache + 1e-8)
这里的decay_rate是一个手动敲定的超参数,我们通常会在[0.9, 0.99, 0.999]中取值。需要特别注意的是,x+=这个累加的部分和Adagrad是完全一样的,但是cache本身是迭代变化的。
另外的方法还有:
- Matthew Zeiler提出的Adadelta
- Adam: A Method for Stochastic Optimization
- Unit Tests for Stochastic Optimization
下图是上述提到的多种参数更新方法下,损失函数最优化的示意图:
1.5 超参数的设定与优化
神经网络的训练过程中,不可避免地要和很多超参数打交道,这是我们需要手动设定的,大致包括:
- 初始学习率
- 学习率衰减程度
- 正则化系数/强度(包括l2正则化强度,dropout比例)
对于大的深层次神经网络而言,我们需要很多的时间去训练。因此在此之前我们花一些时间去做超参数搜索,以确定最佳设定是非常有必要的。最直接的方式就是在框架实现的过程中,设计一个会持续变换超参数实施优化,并记录每个超参数下每一轮完整训练迭代下的验证集状态和效果。实际工程中,神经网络里确定这些超参数,我们一般很少使用n折交叉验证,一般使用一份固定的交叉验证集就可以了。
一般对超参数的尝试和搜索都是在log域进行的。例如,一个典型的学习率搜索序列就是learning_rate = 10 ** uniform(-6, 1)。我们先生成均匀分布的序列,再以10为底做指数运算,其实我们在正则化系数中也做了一样的策略。比如常见的搜索序列为[0.5, 0.9, 0.95, 0.99]。另外还得注意一点,如果交叉验证取得的最佳超参数结果在分布边缘,要特别注意,也许取的均匀分布范围本身就是不合理的,也许扩充一下这个搜索范围会有更好的参数。
1.6 模型融合与优化
实际工程中,一个能有效提高最后神经网络效果的方式是,训练出多个独立的模型,在预测阶段选结果中的众数。模型融合能在一定程度上缓解过拟合的现象,对最后的结果有一定帮助,我们有一些方式可以得到同一个问题的不同独立模型:
- 使用不同的初始化参数。先用交叉验证确定最佳的超参数,然后选取不同的初始值进行训练,结果模型能有一定程度的差别。
- 选取交叉验证排序靠前的模型。在用交叉验证确定超参数的时候,选取top的部分超参数,分别进行训练和建模。
- 选取训练过程中不同时间点的模型。神经网络训练确实是一件非常耗时的事情,因此有些人在模型训练到一定准确度之后,取不同的时间点的模型去做融合。不过比较明显的是,这样模型之间的差异性其实比较小,好处是一次训练也可以有模型融合的收益。
还有一种常用的有效改善模型效果的方式是,对于训练后期,保留几份中间模型权重和最后的模型权重,对它们求一个平均,再在交叉验证集上测试结果。通常都会比直接训练的模型结果高出一两个百分点。直观的理解是,对于碗状的结构,有很多时候我们的权重都是在最低点附近跳来跳去,而没法真正到达最低点,而两个最低点附近的位置求平均,会有更高的概率落在离最低点更近的位置。
2. 总结
- 用一部分的数据测试你梯度计算是否正确,注意提到的注意点。
- 检查你的初始权重是否合理,在关掉正则化项的系统里,是否可以取得100%的准确度。
- 在训练过程中,对损失函数结果做记录,以及训练集和交叉验证集上的准确度。
- 最常见的权重更新方式是SGD+Momentum,推荐试试RMSProp自适应学习率更新算法。
- 随着时间推进要用不同的方式去衰减学习率。
- 用交叉验证等去搜索和找到最合适的超参数。
- 记得也做做模型融合的工作,对结果有帮助。
