@BertramLee
2016-06-14T04:36:34.000000Z
字数 2659
阅读 2004
计算物理第八次作业
物基一班 李云龙 2013301020065
背景
振动是自然界最常见的物理现象之一,在所有振动现象中,简谐振动(simple harmonic motion)是最简单的一类,我们可以给简谐振动施加适当的阻尼和驱动力,使简谐振动模式多样化,其中阻尼振动根据阻尼的大小,又可以分为过阻尼、欠阻尼和临界阻尼振动。
摘要
本文根据课本思路,分别使用欧拉方法和欧拉-克拉默方法分析了简谐振动过程,简单比较了这两种方法的不同,同时分析了单摆、阻尼摆、驱动摆的物理运动过程。
正文
对单摆受力分析如下图所示:
单摆仅受重力,受力关系式为:
假设单摆进行小角度振动,则,
我们可以得到运动方程:
该方程的解为:
其中:, 和是与初始状态有关的常数。
- 欧拉方法:
由(2)式我们可以得到单摆运动的一阶方程组:
于是我们很容易得到欧拉分布计算方法:
- 欧拉-克拉默方法:
考虑到系统的总能量保持不变:
根据小角近似,同时将欧拉方法的(6)(7)式带入到,中,得到:
可以得到欧拉-克拉默方法的的分步计算方法为:
可见,它们的区别仅仅在于用欧拉法时我们是用上一个和上一个来得到新的和;而用欧拉-克拉默法则是用上一个和上一个来得到新的,再利用新的来得到新的。
利用两种方法来获得单摆的摆角随时间的变化曲线。
实验代码如下:(simple_pendulum_tz.py)
我们假设摆长为l=1m,初始角速度,初始角度为,
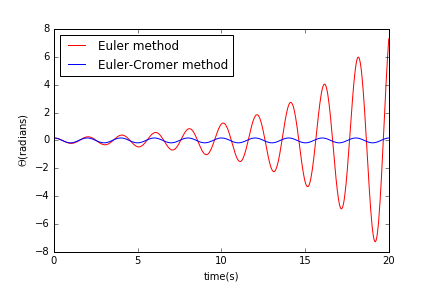
时间间隔为,得到曲线图:
时间间隔为,得到曲线图:
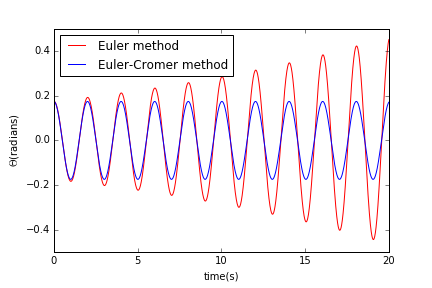
由图我们可以看出,利用欧拉法得出的曲线与实际情况并不符合,摆的振幅及能量都随着时间增加而增大,这显然不正确,并且欧拉方法随着计算的时间间隔即步长越大,偏差会越明显。而利用欧拉-克拉默法得到的曲线则不存在这样的问题,可以看到,欧拉-克拉默方法计算的结果比较稳定,系统的能量始终保持不变,为稳定的正弦图像,并且不随步长的变化有明显的偏差。因此下面对摆的问题的处理我们都采用欧拉-克拉默方法。
- 阻尼摆:
对阻尼摆,运动方程可以写为:
欠阻尼情况下,解析解为:
过阻尼情况下,解析解为:
临界阻尼情况下,解析解为:
利用欧拉-克拉默法可以得到三种情况下的曲线,
实验代码如下:(damped_pendulum_tz.py)
假设摆长为l=1m,初始角速度=0rad/s,初始角度为,时间间隔为=0.01s,如图所示:
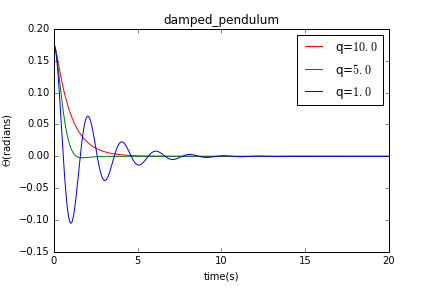
由实验结果结合理论推导,可以得到:
欠阻尼情况下,单摆以频率摆动,并且振幅随时间增加逐渐减小。
过阻尼情况下,单摆摆角随时间增加而以指数形式单调递减。
临界阻尼情况下,单摆恰好不起振。
- 驱动摆:
在阻尼摆的基础上加上驱动项得到驱动摆,驱动摆运动方程形如:
其中为驱动项。
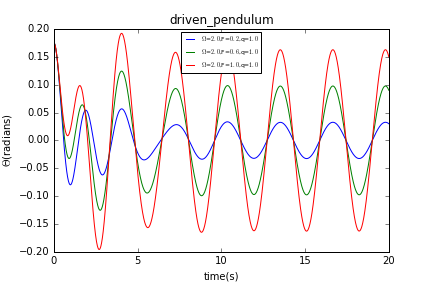
下面研究驱动项对摆的影响。假设摆长为l=1m,初始角速度=0rad/s,初始角度为,时间间隔为=0.01s,阻尼系数q=1.0。
先使保持不变,分别使等于0.2,0.6,1.0,
实验代码如下:(driven_pendulum_tz)
得到曲线如下:
然后使保持不变,分别使等于1.0,2.0,3.0,
得到曲线如下:
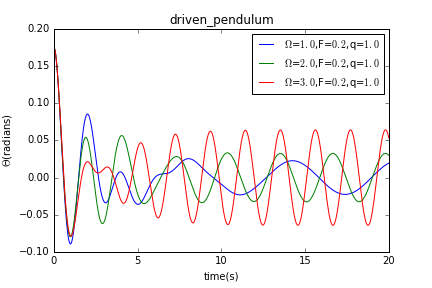
上两种情况有一共同点,摆在经历一段不稳定的情况后均以稳定的振幅及频率摆动,相当于单摆的运动。当我们保持不变改变时,不同情况下摆在稳定摆动时的频率不变,振幅有明显差别;当我们保持不变改变时,不同情况下摆在稳定摆动时的频率有明显区别,振幅大致相同。
总结
本文主要研究了简谐运动——单摆的相关问题,我们讨论了欧拉法和欧拉-克拉默两种方法,后者在分析时更具有优势。同时研究了单摆的阻尼振动,并在此基础上加上驱动项,得到单摆在一段时间后会趋于稳定。
致谢
本文参考了舟舟同学的作业和计算物理教材,特此感谢。
