@Yano
2016-01-03T10:17:23.000000Z
字数 1513
阅读 4052
机器人控制 APP 说明书
Android
APP下载链接: http://pan.baidu.com/s/1o75cYIe 密码: 7smq
更新的内容
- 去掉UDPBroadCast界面,打开APP自动发送字符串"Nankai_Robot"到局域网所有机器人
- RobotList的list中,显示机器人的ID
- 发送和接收信息均采用规定格式的JSON串
- 在RobotList界面中,选择一个机器人,进入RobotControl(机器人控制)界面
- 在RobotControl界面中,自动TCP连接选择的机器人,连接成功会提示
- 在RobotControl界面中,上、下、左、右、开始、停止按钮,替换为箭头图案
- 在RobotControl界面中,加入重力传感器控制,打开开关后,能够通过倾斜手机控制机器人
- 在RobotControl界面中,加入机器人状态信息的查询
- APP图标替换为公司Logo,并将APP名称“NanKaiRobot”替换为“Robot”,防止在手机界面名称显示不完整
- 加入菜单,并加入了“公司信息”的显示界面
- 优化代码,增强程序健壮性
APP简介
APP主要有两个界面:RobotList界面、RobotControl界面。
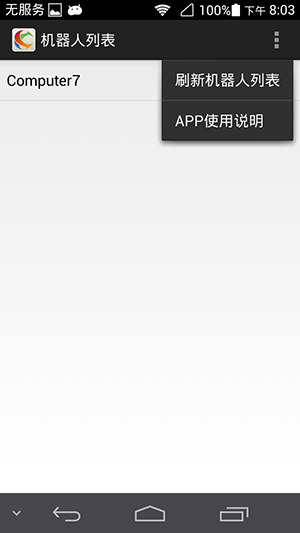
1. RobotList界面
利用UDP广播,发现在线的机器人,并将所有机器人的ID放入list展示。在菜单中可以刷新list,点击list进入RobotControl界面。
2. RobotControl界面
在RobotList中选择一个机器人,会进入RobotControl界面。APP自动TCP连接该机器人,并能够通过按键、重力感应控制机器人,查询机器人的状态信息。在菜单中可以返回list界面。

UDP及TCP连接
1. UDP连接
打开APP,进入RobotList界面,自动向局域网发送UDP广播,端口号是11000。所有在线机器人,收到UDP广播后,应该向APP发送机器人的信息(JSON字串,包含ID)。
2.TCP连接
在RobotList中选择一个机器人,会进入RobotControl界面。自动TCP连接该机器人,端口号是12345。每次离开RobotControl界面,会自动断开TCP连接。
RobotControl界面
Title显示该机器人的ID。
1. 控制按键:上下左右
发送的命令会在APP上边的TextView显示。如下图:

2. 控制按键:开始/停止
上下左右箭头中间,是开始/停止按键。该按键有2个功能:
- 开始/停止命令控制
- 重力传感器的开关
初始状态如上图所示。在单击开始/停止按钮后,会发送开始命令;再次单击,会发送结束命令。
初始状态下,重力传感器是关闭的。长按开始/停止按钮,会打开重力传感器,此时能够通过手机重力感应,控制机器人,并有Toast提示。根据手机倾斜的角度,发送的命令和上、下、左、右按键一样;再次长按开始/停止按钮,会关闭重力传感器,并有Toast提示。
3. 重力感应控制
长按开始/停止按钮,会打开重力传感器。
- 向左倾斜超过20度,功能与按下左键一样
- 向右倾斜超过20度,功能与按下右键一样
- 向上倾斜超过20度,功能与按下上键一样
- 向下倾斜超过20度,功能与按下下键一样
4. 状态信息的显示
在RobotControl界面下面,有每个状态信息的按钮。单击按钮,会发送对应的查询JSON字符串,返回的消息会通过Toast显示。
说明信息
图片是我自己PS的,如下图。