@liuhui0803
2017-05-13T08:43:07.000000Z
字数 4064
阅读 3737
MXNet API入门 —第1篇
深度学习 神经网络 MXNet AWS AIM
摘要:
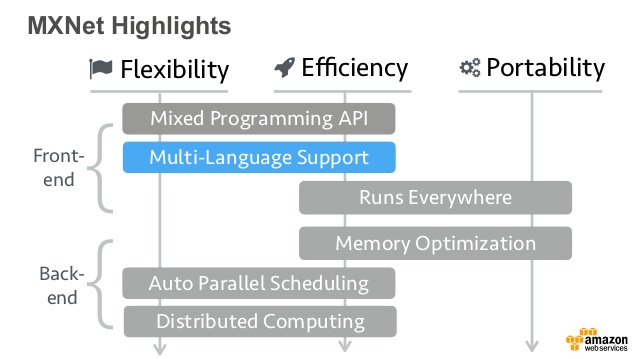
Apache MXNet是一种功能全面、可以灵活编程并且扩展能力超强的深度学习框架,支持包括卷积神经网络(CNN)与长短期记忆网络(LSTM)在内的顶尖深度模型。这一系列文章介绍了MXNet的基本概念和使用方法。本篇主要介绍了相关的入门知识。
正文:
MXNet教程
这一系列文章将概括介绍深度学习库MXNet,将介绍该库的主要功能及其Python API(可能会成为该库的首选API)。随后还将提供一些有关MXNet的在线教程和笔记,希望能帮助大家更好地理解这项技术!
如果希望进一步了解MXNet的原理和架构,推荐阅读这篇论文:“MXNet:适用于异构分布式系统,灵活高效的机器学习库”。本文将介绍这篇论文涉及的大部分概念,不过会尽量以更浅显易懂的方式进行介绍。
本文将尽可能清晰直白地讲解,但你需要对数学和基本术语有一定了解,本文不会(刻意)从最基础的内容讲起。这一系列文章不会让你变成该领域的专家(我自己都还不是专家),本文目的在于帮你更好地理解如何为自己的应用添加深度学习能力。
在本地运行MXNet
首先最重要的事:MXNet的安装。本文不会详细介绍安装方法,只会介绍一些技巧。
MXNet最酷的功能之一在于,可以在CPU和GPU上实现完全相同的运行效果(下文将介绍如何针对具体运算选择运行位置)。这意味着就算你的计算机不具备Nvidia GPU(例如我的MacBook),依然可以编写并运行MXNet代码,并放在具备GPU的系统中使用。
如果你的计算机带有符合要求的GPU也更好,但还需要安装CUDA和cuDNN工具包,大部分情况下这一过程犹如一场噩梦。就算MXNet二进制文件和Nvidia工具之间存在哪怕最轻微的不兼容问题,也会导致安装失败无法使用。
因此我个人强烈建议你使用MXNet网站提供的Docker镜像:一个针对CPU环境,另一个针对GPU环境(要求具备nvidia-docker)。这些镜像包含预安装的所有必要组件,可以帮助用户更快速投入使用。
sudo -H pip install mxnet --upgradepython>>> import mxnet as mx>>> mx.__version__'0.9.3a3'
另外值得一提的是,这个Docker镜像提供的Python程序包似乎比通过“pip”方式获得的版本更新一些。
docker run -it mxnet/pythonroot@88a5fe9c8def:/# python>>> import mxnet as mx>>> mx.__version__'0.9.5'
通过AWS运行MXNet
AWS提供了适用于Linux和Ubuntu的深度学习AMI (Amazon Machine Image)。这些AMI包含预安装的各种深度学习框架(MXNet是其中之一),此外还包含Nvidia工具以及其他工具。无需配置立即可用。
====================================================================__| __|_ )_| ( / Deep Learning AMI for Amazon Linux___|\___|___|====================================================================[ec2-user@ip-172-31-42-173 ~]$ nvidia-smi -LGPU 0: GRID K520 (UUID: GPU-d470337d-b59b-ca2a-fe6d-718f0faf2153)[ec2-user@ip-172-31-42-173 ~]$ python>>> import mxnet as mx>>> mx.__version__'0.9.3'
我们可以在常规实例或GPU实例上运行这种AMI。如果你的计算机未配备Nvidia GPU,那么在稍后启动训练网络后这一特性就会显得很实用:成本最低的选项是使用每小时价格仅为0.65美元的g2.2xlarge实例。
因此目前,继续按照老派的做法使用CPU就够了!一起开始吧。
为何说NDArrays很重要
我们要介绍的第一类MXNet API是NDArray API。NDArray是一种n维阵列,其中可包含类型与大小完全一致的项(32位浮点、32位整数等)。
这种阵列为何重要?之前的一篇文章中进行过解释:神经网络的训练和运行会涉及大量数学运算,此时将使用多维阵列来存储数据。
输入数据,神经元进行权值,随后输出的数据存储至向量和矩阵(Matrice)中,因此自然而然就产生了这种类型的构造。
用一个简单的例子来类比一下:图片分类。下图代表一个手写的数字“8”,图片规格为18x18像素。
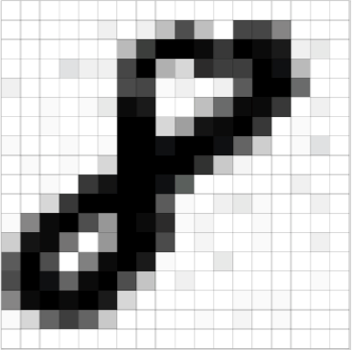
数字“8”,18x18像素
这个图片可以看作是一个18x18的矩阵,其中每个单元代表了对应像素的灰度值:“0”代表白色,“255”代表黑色,介于两者之间的值代表254级灰度。我们正是通过这种矩阵化的呈现训练神经网络对从0到9的数字进行分类的。
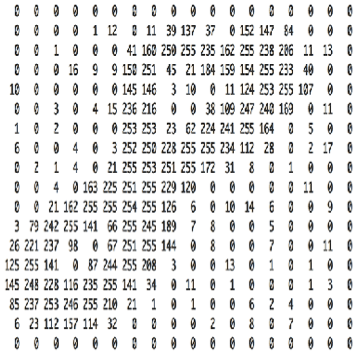
一个18x18的矩阵,代表了上述图片的灰度值
假设我们用彩色图片取代灰度图片。这样每个图片将需要用3个矩阵来表示,每种颜色对应一个矩阵,此时输入的数据会变得略微复杂一些。
接着更进一步,假设为了实现无人驾驶需要进行实时图片识别:为了能通过高质量的实时数据做决策,我们会使用1000x1000像素的RGB图片,并且每秒钟需要识别30帧。每一秒,都需要处理90个1000x1000的矩阵(30帧x3色)。如果每个像素用一个32位值表示,那就是90x1000x1000x4字节,大约343兆字节。如果用到了多个摄像头,数据量还会进一步激增。
对神经网络来说这个数据量已经很大了:为了获得最优性能(例如最小延迟),GPU并不会逐张处理图片,而是会偏批量处理。如果批的大小为8,我们的神经网络将以1000x1000x24的块为单位处理输入的数据,也就是以三原色代表的8张1000x1000像素图片组成的三维阵列。
底线:最起码需要理解NDArrays :) 这是神经网络的基础,并且我们的大部分数据都会存储为这种形式。
NDArray API
了解了NDArrays的重要性后,再来看看工作方式(没错,终于开始讲代码了!)。如果你曾用过numpy这个Python库会更好理解:NDArrays与其极为类似,并且你可能已经熟悉其中的大部分API,完整文档可参阅这里。
首先从最基础的开始。这就不需要过多解释了吧 :)
>>> a = mx.nd.array([[1,2,3], [4,5,6]])>>> a.size6>>> a.shape(2L, 3L)>>> a.dtype<type 'numpy.float32'>
默认情况下,一个NDArray可以保存32位浮点,不过这个大小可以调整。
>>> import numpy as np>>> b = mx.nd.array([[1,2,3], [2,3,4]], dtype=np.int32)>>> b.dtype
NDArray的打印很简单,这样:
>>> b.asnumpy()array([[1, 2, 3],[2, 3, 4]], dtype=int32)
NDArray支持所有需要的数学运算,例如可以试试看进行一个面向元素的矩阵乘法:
>>> a = mx.nd.array([[1,2,3], [4,5,6]])>>> b = a*a>>> b.asnumpy()array([[ 1., 4., 9.],[ 16., 25., 36.]], dtype=float32)
再来个严格意义上的矩阵乘法(又叫“点积”)怎么样?
>>> a = mx.nd.array([[1,2,3], [4,5,6]])>>> a.shape(2L, 3L)>>> a.asnumpy()array([[ 1., 2., 3.],[ 4., 5., 6.]], dtype=float32)>>> b = a.T>>> b.shape(3L, 2L)>>> b.asnumpy()array([[ 1., 4.],[ 2., 5.],[ 3., 6.]], dtype=float32)>>> c = mx.nd.dot(a,b)>>> c.shape(2L, 2L)>>> c.asnumpy()array([[ 14., 32.],[ 32., 77.]], dtype=float32)
接着再来试试一些更复杂的运算:
- 初始化一个均匀分布的1000x1000矩阵并存储在GPU#0(此处使用了一个g2实例)。
- 初始化另一个正态分布的1000x1000矩阵(均值为1,标准差为2),也存储在GPU#0。
>>> c = mx.nd.uniform(low=0, high=1, shape=(1000,1000), ctx="gpu(0)")>>> d = mx.nd.normal(loc=1, scale=2, shape=(1000,1000), ctx="gpu(0)")>>> e = mx.nd.dot(c,d)
别忘了,MXNet可以在CPU和GPU上实现一致的运行结果。这就是个很棒的例子:只要将上述代码中的“gpu(0)”替换为“cpu(0)”,就可以通过CPU运行这个点积。
至此你应该可以开始与NDArray一起游戏了。我们还可以用其他更高级的函数(FullyConnected等)来构建神经网络,这些内容等真正开始介绍神经网络的时候再说。
今天要讲的就是这些。下篇文章将要介绍Symbol API,通过它我们可以定义数据流,而这才是神经网络最重要的部分。感谢阅读,还请继续关注。
后续内容:
- 第2篇:Symbol API
- 第3篇:Module API
- 第4篇:使用预训练模型进行图片分类(Inception v3)
- 第5篇:进一步了解预训练模型(VGG16和ResNet-152)
- 第6篇:通过树莓派进行实时物体检测(并让它讲话!)
作者:Julien Simon,阅读英文原文:An introduction to the MXNet API — part 1
