@zhz1098605130
2016-06-09T05:02:29.000000Z
字数 1968
阅读 1417
第八次作业
作者:钟惠舟 班级:物基一班 学号:2013301020058
背景
本次作业简单对比了欧拉法与欧拉-克罗莫法的不同,并研究了单摆、阻尼摆及驱动摆的一些性质。
正文
- 单摆
对于单摆,在小角度摆动时,其运动方程可以写成:
其解析解为:,式中,与取决于单摆的初始状态。
我们可以将此二阶方程写作两个一阶方程:
如果我们使用欧拉法,则:
若使用欧拉-克拉默法,则:
它们的区别仅仅在于用欧拉法时我们是用上一个和上一个来得到新的和;而用欧拉-克拉默法则是用上一个和上一个来得到新的,再利用新的来得到新的。
我们利用两种方法来获得单摆的摆角随时间的变化曲线。我们假设摆长为l=1m,初始角速度=0rad/s,初始角度为,时间间隔为=0.01s,得到曲线图:
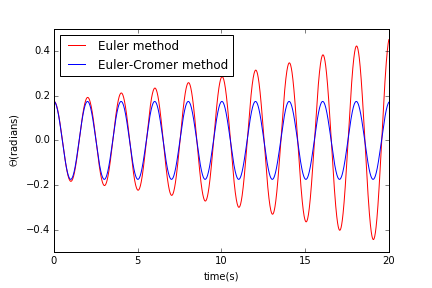
由图我们可以看出,利用欧拉法得出的曲线与解析解并不符合,摆的振幅及能量都随着时间增加而增大,这显然不正确。而利用欧拉-克拉默法得到的曲线则不存在这样的问题。因此之后对摆的问题的处理我们采用的都是欧拉-克拉默法。 - 阻尼摆
对于阻尼摆,其运动方程形如:
式中()项为阻尼项,q为阻尼系数。
我们分三种情况讨论:
1.欠阻尼状态
这种状态下方程的解析解
此时摆以频率摆动,振幅随时间增大而减小。
2.过阻尼状态
此时方程的解析解为
摆角随时间增加而以指数形式单调递减。
3.临界阻尼状态
方程解析解形如
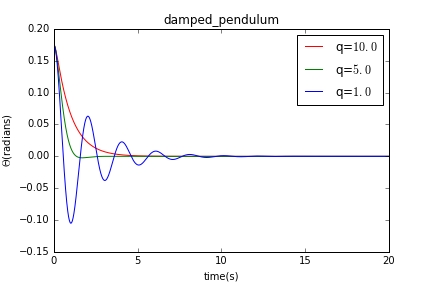
利用欧拉-克拉默法可以得到三种情况下的曲线,假设摆长为l=1m,初始角速度=0rad/s,初始角度为,时间间隔为=0.01s:
- 驱动摆
在阻尼摆的基础上加上驱动项得到驱动摆,驱动摆运动方程形如:
其中为驱动项。
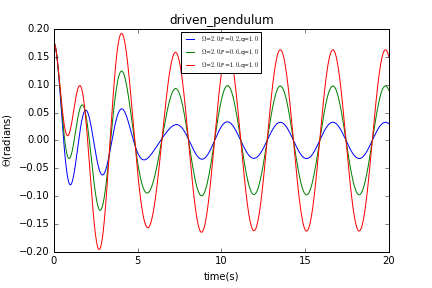
我们研究驱动项对摆的影响。假设摆长为l=1m,初始角速度=0rad/s,初始角度为,时间间隔为=0.01s,阻尼系数q=1.0。
我们先使保持不变,分别使等于0.2,0.6,1.0,得到曲线如下:
然后我们使保持不变,分别使等于1.0,2.0,3.0,得到曲线如下:
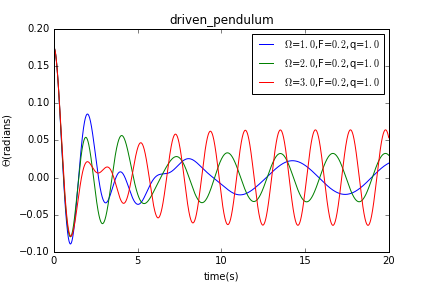
上两种情况有一共同点,摆在经历一段不稳定的情况后均以稳定的振幅及频率摆动,相当于单摆的运动。当我们保持不变改变时,不同情况下摆在稳定摆动时的频率不变,振幅有明显差别;当我们保持不变改变时,不同情况下摆在稳定摆动时的频率有明显区别,振幅大致相同。
总结
在研究摆的问题时,欧拉法近似不能使我们的问题得到解决,我们采取了新的近似方法:欧拉-克拉默方法。在单摆的基础上加上阻尼项,摆的振幅会不断变小直至停下来;在此基础上加上驱动项,摆在一段时间后会趋于稳定,形如单摆。
致谢
本次作业参照了教材,感谢蔡浩老师的教导。
