@floatsd
2016-01-02T11:26:20.000000Z
字数 4498
阅读 1572
实验五 和米字管
CM4实验报告
实验目的
- 了解总线通信原理
- 学会用C语言模拟时序
- 学会查找和利用板子上的资源,控制米字管
实验原理
- 是一种简单的双向一线制串行通信总线。多个符合总线标准的器件都可以通过同一条总线进行通信,而不需要额外的地址译码器。总线应用中主要涉及如下几个基本概念:
- 发送器:本次传送中发送数据(不包括地址和命令)到总线的器件。
- 接收器:本次传送中从总线接收数据(不包括地址和命令)的器件。
- 主机:初始化发送,产生时钟信号和终止发送的器件,它可以是发送器或接收器,主机通常是微控制器。
- 从机:被主机寻址的器件,他可以是发送器或接收器。
- 总线仅适用两个信号:SDA和SCL。SDA是双向串行数据线,SCL是双向串行时钟线。
| SDA | SCL | 总线状态 |
|---|---|---|
| 高电平 | 高电平 | 空闲(stop之后) |
| 高到低 | 高电平 | START(之后视为忙状态) |
| 低到高 | 高电平 | STOP |
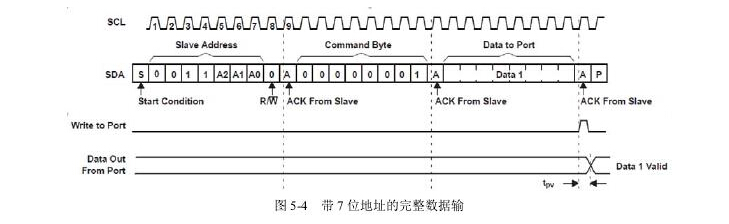
上表所示总线起止条件如图所示:

而每传送一个命令所包含的数据如下:一个起始位,从机地址,ACK校验位,命令字,ACK校验位,数据,最后再是一个ACK校验位,由此可以改变帧头帧尾制定通信协议。它们形式如下:
简单地说是一种总线,它的接收器和发射器都在总线上接收发送数据,也即分别通过SCL和SDA线接入总线。一定有主机和从机。板子上的资源和特性如下:
- PCA9557芯片、ADXL345芯片上均有I2C总线接口。每条总线有一条SDA双向串行数据线和一条SCL双向串行时钟线。数据传输速率可根据需要选择高速或低速。
- 总线仅由2根信号线组成,可节省芯片I/O、节省PCB面积、节省线材成本等等。
- 总线协议简单容易实现协议的基本部分相当简单,因此在芯片内部以硬件的方法实现部件的逻辑是容易的。即使MCU内部没有硬件的总线接口,也能够方便的利用开漏的I/O(如果没有,可用准双向I/O代替)来模拟实现。
- 支持的器件多主流半导体公司生产的大量器件带有I2C器件提供了广阔的空间。在现代微控制器设计当中总线接口已经成为标准的重要片内外设之一。
- 总线上可同时挂接多个器件同一条总线可以挂接多个器件,器件之间靠不同的编址来区分的,不需要附加的I/O线或地址译码部件。
- 总线可裁减性好在原有总线连接的基础上可以随时新增或者删除器件。用软件可以容易实现线的自动检功能,能够及时发现总线上的变动。
- 总线电气兼容性总线规定器件之间以开漏I/O相连接,只要选取适当的上拉电阻即能实现不同逻辑电平之间的互联通信,而不需要额外的转换。
- 支持多种通信方式一主多从、多主机通信及广播模式等。
- 通信速率高并兼顾低速通信总线标准传输速率为100kbps(每秒100K位)。在快速模式下为400kpbs。按照后来修订的版本,位速率可高达3.4Mbps。总线的通信速率也可以低至几kpbs以下,用以支持低速器件(比如软件模拟的实现)或者用来延长通信距离。从机也可以再接受和相应一个字节后使SCL线保持低电平迫使主机进入等待状态直到从机准备好下一个要传输的字节。
- 有一定的通信距离总线通信距离通常为几米到十几米。通过降低传输速率、屏蔽、中断方法,通信距离也可延长到数十米乃至数百米以上。
- PCA9557芯片、ADXL345芯片上均有I2C总线接口。每条总线有一条SDA双向串行数据线和一条SCL双向串行时钟线。数据传输速率可根据需要选择高速或低速。
米字管
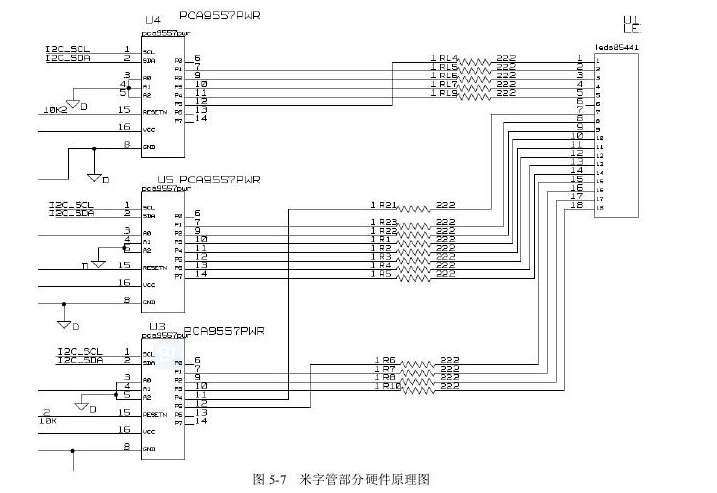
- 米字管是一种半导体发光器件,其基本单元是发光二极管,实验中使用的EK-TM4C1294XL实验开发板上,有四个米字管和两个冒号,每个米字管有14个发光二极管组成。这些米字管由三个PCA9557芯片控制,其中第一个芯片负责选择点亮哪个二极管,这里的的管脚可以总结为4+1的形式,前四个管脚分别控制对应米字管上的ABCDEF,HJMN,G1,G2等二极管,第五个控制特殊管脚(每个米字管上的k,l)和两个冒号。当对应引脚为高电平时,相应段就会点亮。
| 芯片 | 端口 | 管脚 |
|---|---|---|
| U4 | P1 | 2 |
| P2 | 3 | |
| P3 | 4 | |
| P4 | 5 | |
| P5 | 1 | |
| U5 | P1 | 8 |
| P2 | 9 | |
| P3 | 10 | |
| P4 | 11 | |
| P5 | 12 | |
| P6 | 13 | |
| P7 | 14 | |
| U6 | P1 | 16 |
| P2 | 17 | |
| P3 | 18 | |
| P4 | 7 | |
| P5 | 15 |
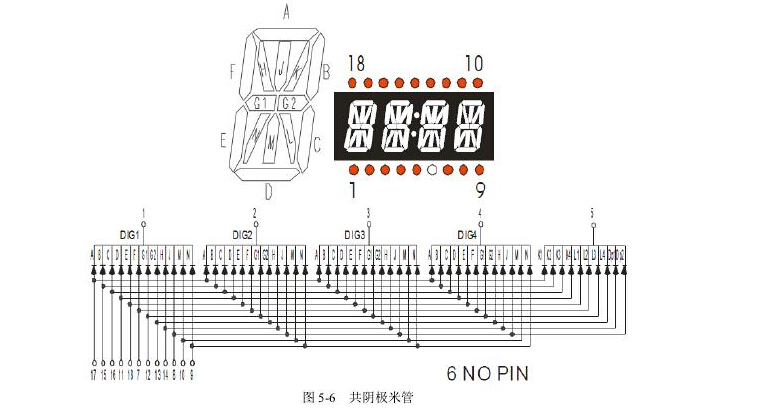
- 实验中使用共阴极米字管,总共四个加两个冒号,它在板子上大约长这样:
- 它的硬件原理图如下:
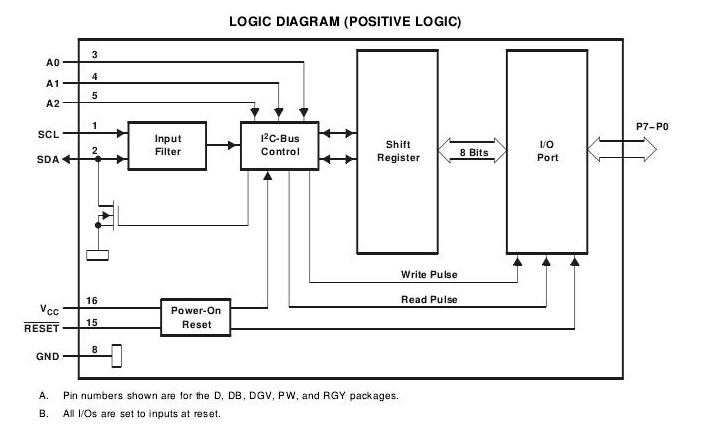
- 从上图可以看到,有三个芯片在控制这拉高拉低电平,芯片结构如下:
流程图
- 所以本次实验流程图大致如下:
实现功能
- 控制米字管稳定的亮起特定数字字母。
实验代码
预设数字码段
static const char tubeDigital[10][2]={ // SegmLow, SegHigh{ 0x10, 0x3E }, // 0{ 0x00, 0x18 }, // 1{ 0x70, 0x2C }, // 2{ 0x70, 0x26 }, // 3{ 0x60, 0x32 }, // 4{ 0x70, 0x16 }, // 5{ 0x70, 0x1E }, // 6{ 0x00, 0x26 }, // 7{ 0x70, 0x3E }, // 8{ 0x70, 0x36 }, // 9};
中断的配置及初始化
/******************************************************************** 函数: I2C_Init()* 描述: I2C初始化* 输入值:无* 返回值:无*****************************************************************/void I2C_Init(){SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOB);/*B2设置为SCL时钟线,B3设置为SDA串行数据线*/GPIOPinTypeI2C(GPIO_PORTB_BASE, GPIO_PIN_2 | GPIO_PIN_3);/*设置B的引脚复用功能为SCL和SDA*/GPIOPinConfigure(GPIO_PB2_I2C0SCL);GPIOPinConfigure(GPIO_PB3_I2C0SDA);GPIOPinTypeI2CSCL(GPIO_PORTB_BASE, GPIO_PIN_2);GPIOPinTypeI2C(GPIO_PORTB_BASE, GPIO_PIN_3);SysCtlPeripheralEnable(SYSCTL_PERIPH_I2C0); //使能I2C0模块/* 设I2C主机模式, 使用系统时钟, 400kbps的快速模式(false普通模式100Kbps)*/I2CMasterInitExpClk(I2C0_BASE,1000000, true);I2CMasterEnable(I2C0_BASE); //使能I2C0主机模式I2CSlaveEnable(I2C0_BASE);//使能I2C从机模式}
米字管芯片初始化
/********************************************************************* 函数: PCA9557_Init()* 描述: PCA9557初始化* 输入值:无* 返回值:无******************************************************************/void PCA9557_Init(){ uint8_t SendBuff[2] = {PCA9557_REG_CONFIG, 0x00};//PCA9557_REG_CONFIG(COMMAND BYTE)配置成读写模式I2C_SendBuff(I2C0_ADDR_TUBE_SEL, SendBuff, 2);//U21管选 I2C0_ADDR_TUBE_SEL (SLAVE ADDR)I2C_SendBuff(I2C0_ADDR_TUBE_SEG_LOW, SendBuff, 2);//U22管选 I2C0_ADDR_TUBE_SEG_LOW(SLAVE ADDR)I2C_SendBuff(I2C0_ADDR_TUBE_SEG_HIGH, SendBuff, 2);//U23管选 I2C0_ADDR_TUBE_SEG_HIGH(SLAVE ADDR)}
点亮米字管
/******************************************************************** 函数: MZG_run()* 描述: 点亮米字管为a,b,c,d(在while里的动态显示)* 输入值:uint8_t a,b,c,d* 返回值:无*****************************************************************/void MGZ_run(){int t=50;//这个延时时间I2C_ClearTheTube(); //清屏I2C_U4TubeSelect(~0x20); //选择数字管1I2C_U5TubeLowPinControl(tubeDigital[a][0]);//拉低U5的引脚I2C_U3TubeHighPinControl(tubeDigital[a][1]);//拉高U3引脚DelayMs(t);I2C_ClearTheTube(); //清屏I2C_U4TubeSelect(~0x02); //选择数字管2I2C_U5TubeLowPinControl(tubeDigital[b][0]);//拉低U5的引脚I2C_U3TubeHighPinControl(tubeDigital[b][1]);//拉高U3引脚DelayMs(t);I2C_ClearTheTube(); //清屏I2C_U4TubeSelect(~0x04); //选择数字管3I2C_U5TubeLowPinControl(tubeDigital[c][0]);//拉低U5的引脚I2C_U3TubeHighPinControl(tubeDigital[c][1]);//拉高U3引脚DelayMs(t);I2C_ClearTheTube(); //清屏I2C_U4TubeSelect(~0x08); //选择数字管4I2C_U5TubeLowPinControl(tubeDigital[d][0]);//拉低U5的引脚I2C_U3TubeHighPinControl(tubeDigital[d][1]);//拉高U3引脚DelayMs(t);}
遇到的问题和解决办法
- 米字管整个的闪烁严重,调高系统频率。
- 米字管每一时刻轮流一个特别亮的闪烁,改变减小延时t
实验结论
- 米字管这个东西,看起来很简单,原理也很简单。
- 结果实际用起来麻烦的不得了。主要问题是的频率,高于一定值,就无法正常读取(据说10M实际测试,一块板子8M就不行一块板子9M就不行)如果是静态显示还好,动态刷新起来就各种问题。还没想好怎么分频,于是当他和别的外设共事的时候,简直是灾难。
- 选管清屏的函数因为完全用的是学长的函数,就当他们是库函数了,没有写在实验报告中。
