@floatsd
2016-06-09T22:36:40.000000Z
字数 1338
阅读 1112
实验八 PID算法实验
note_DSP
1 实验目的
- 掌握利用ICETEK-F2812-A 评估板与ICETEK-CTR板上带速度反馈的直流电机B的连接和控制原理;
- 熟悉F2812DSP的通用IO端口和定时器的编程使用。
- 学习利用数字PID控制算法控制电机的转速。
2 实验原理
2.1 原理
- 利用电机速度读数控制PWM脉宽,从而实现闭环调速控制;
- PID是各种意味上常用的控制器,包括比例积分微分环节:
- 由于计算机控制系统里,实际运算时是经过采样的数字量,做离散PID模型如下:
- 实验中采用增量式PID控制算法,这样可以不用取之前所有的信息,经推导将上式变形如下:
2.2 程序设计
- 控制环节:系统维护一个全局变量pwm,计算控制电机绕组电压的PWM波形的占空比,取值越大,通过电机的电流越多,电机加速,反之,占空比越小电机越慢。
- 采样环节:由于电机速度反馈信号频率为几十赫兹,所以设计测量周期较长,这样保证偶然偏差值较少发生,但系统“反应”较慢。采样脉冲设计为1赫兹的方波信号。测量的结果为电机转动圈数,比如测速结果为84,则实际转速为84 转/秒。
- 计算环节:利用公式(1-6),取A=0.6、B=0.2、C=0.1,直接由测速结果计算出占空比调节增量,计算中限制了增量的最大值不能超过10,以免引起太大的电流波动。
- 显示:在每次调节电机转速时刷新显示各参数。“设定”为实验者指定电机转速,单位为 “转/秒”;“测速”为通过采样环节得到的电机速度测量值,单位也为“转/秒”;“误差”值速度测量值与设定值之差;“调整”为通过PID算法得到并付诸调整的调整值,调整对象为占空比;“占空比”为当前采样的占空比;“输入”通过键盘输入新的转速设置,按“9”键生效。
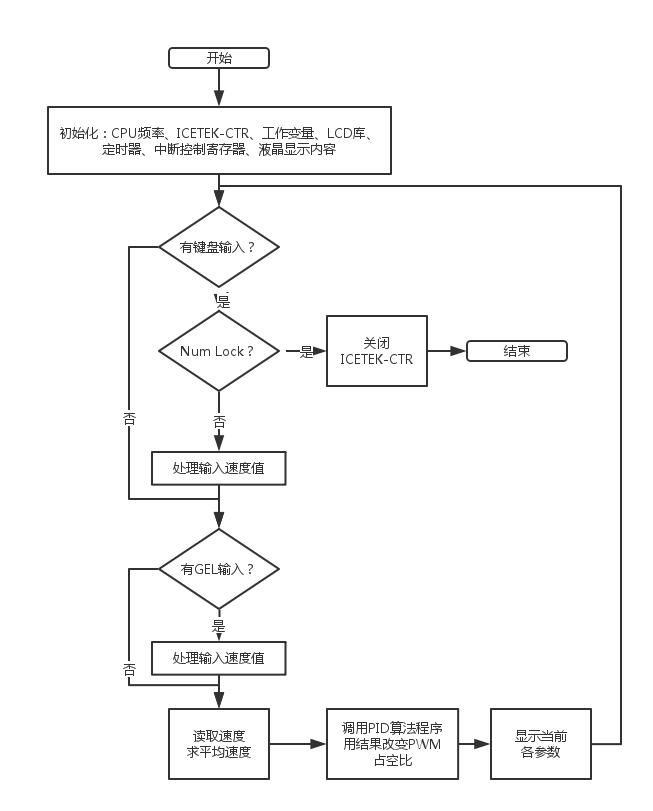
- 该程序设计流程图如下:
3 实验内容
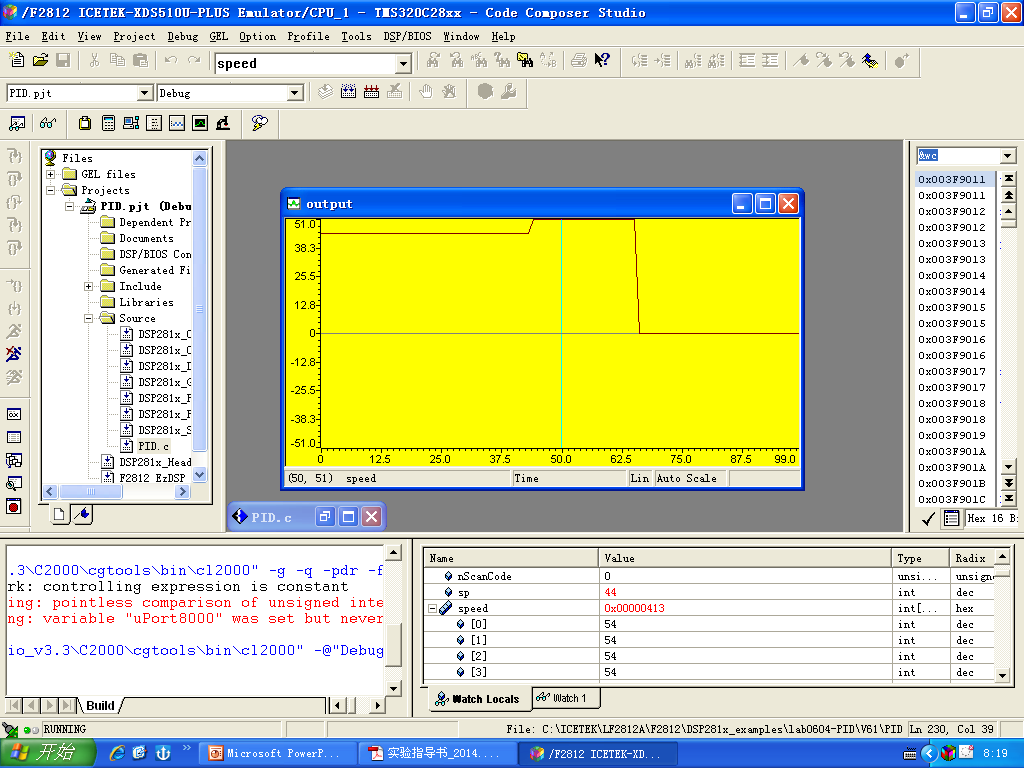
- 连接设备,接通电源,打开工程文件PID.pjt,运行程序,电机转动,LCD屏上出现PID控制菜单,可以用右下方的小键盘控制。

- 同时开启观察窗口观察波形,从波形和下方数据视窗可以看到电机占空比稳定于54,由于程序设置到六十六个点截止,所以可以看到波形有一个从有值到无值的跳变。
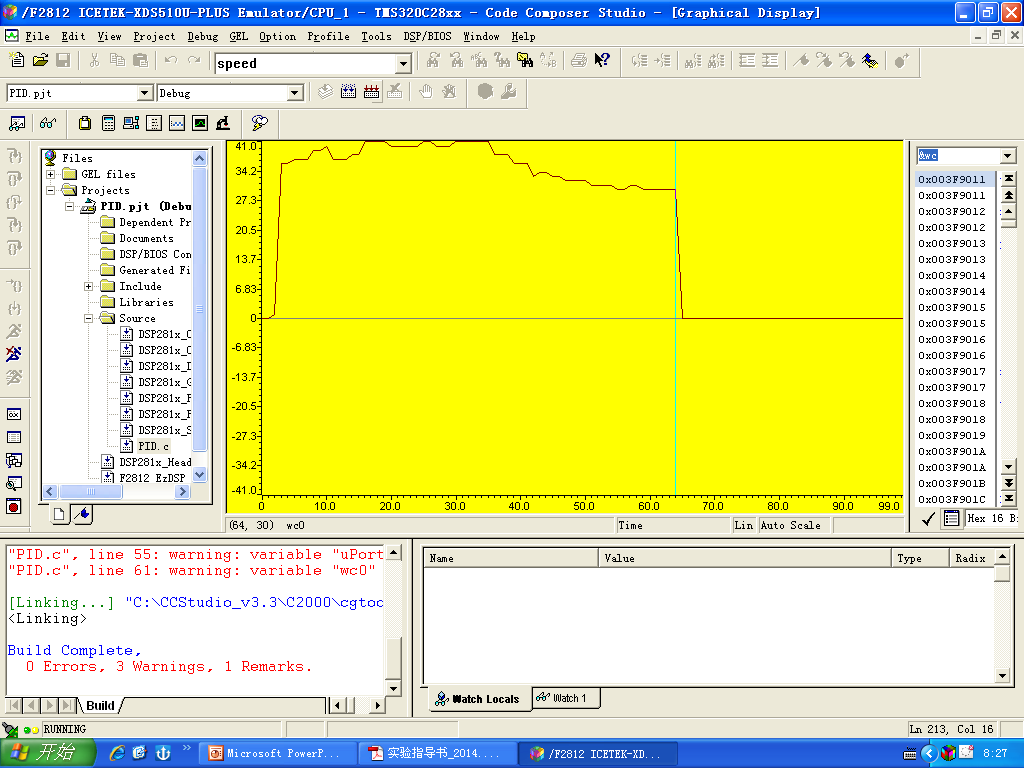
- 在运行阶段修改参数和设定值SV,观察曲线变化情况,程序设置步长较长,不能很好的测算响应的具体参数,但可以观察大致趋势如下,占空比由旧稳定值稳定于一新稳定值(用户设定的给定值):
4 实验总结
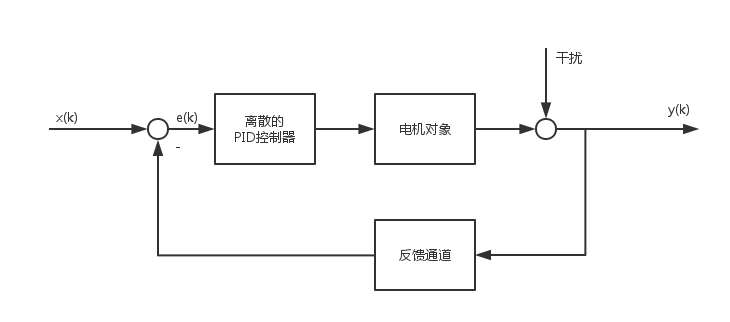
- 在实验五,直流电机实验里我们接触的是开环的调速,这次实验则是一种闭环的调速,虽然看起来好像都是用户设置期望值,但其实原理是不同的,作简单的单回路PID控制系统结构框图如下: