@floatsd
2016-01-02T12:38:04.000000Z
字数 23774
阅读 1487
CM4实验报告
CM4实验报告
范璐 自动化1302 201303080207
前言
- 我觉得给那块板子拍照是件比较愚蠢的事情,主要是时间花的不值得,毕竟验收的时候已经看过了。而且,虽然每个模块的函数独立而且各司其职,但是主要是每次的①主函数和②中断向量中断优先级中断使能等中断相关③文件包含关系都要改一些东西。如果要依次再把之前的实验都做一遍,意味着要多次改整个的那个项目,修改东西往往比加东西要来的复杂和蛋疼。因为改东西有时候,改着改着,就不对了。出于以上担忧,我决定不拍板子跑程序的效果照片并对做了这项工作的同学报以崇高的敬意。
- 接触到的第一个例程是@zxk的例程是一件幸运的事,从一开始就养成了一些比较能够提高效率的编程习惯。@zxk的教学基本都是干货,在对每次要用的模块长什么样有个概念的前提下,他的讲解清晰易懂,并且会补充一些实用的细节,为快速入门之佳品,在此对助教表达感谢。
- 后几个实验难度其实比较大,但是学长已经做好了大部分工作,几乎相当于已经编写了一套库函数出来,我们只要使用即可,大大的减轻了实验难度和我们的工作量。
- 使用的在线编辑器基于markdown语言,很方便,就是没法空行或者打空格。导出PDF时的分页因此变得无法控制,丑的不忍直视。
实验一 GPIO流水灯
1.1实验目的
- 把CCS安装好,熟悉CCS操作,编译界面
- 创建工程,开始学习TM4C1294软件开发过程
- 了解GPIO的概念,学会查找端口功能,调用GPIO库函数让LED跑起来
1.2实验原理
- 在启用GPIO模块之前,必须先启用GPIO模块的时钟,所以除了需要调用的GPIO模块使能,还要设定系统时钟。
- 第一次试验不涉及中断,主要了解GPIO端口要在使用之前初始化和配置,如果要用寄存器的方式来调整,需要查手册看模式和设置对应的配置,我们的实验中使用库函数进行配置。
1.2.1系统时钟
- 系统时钟SysClk可以由板子上的任意一个时钟源直接提供,也可以通过内部主PLL提供,也可以由PIOSC的四分频(4MHz±1%)提供。
- PLL(Phase Locked Loop), 为锁相回路或锁相环, 用来统一整合时脉讯号,使内存能正确的存取资料。PLL用于振荡器中的反馈技术。 许多电子设备要正常工作,通常需要外部的输入信号与内部的振荡信号同步,利用锁相环路就可以实现这个目的。
- TM4C1294的四个时钟源分别是
- 精密内部振荡器PIOSC
- 主振荡器MOSC
- 低频内部振荡器LFIOSC
- 休眠模块时钟
- 初始化和配置系统时钟的函数如下:
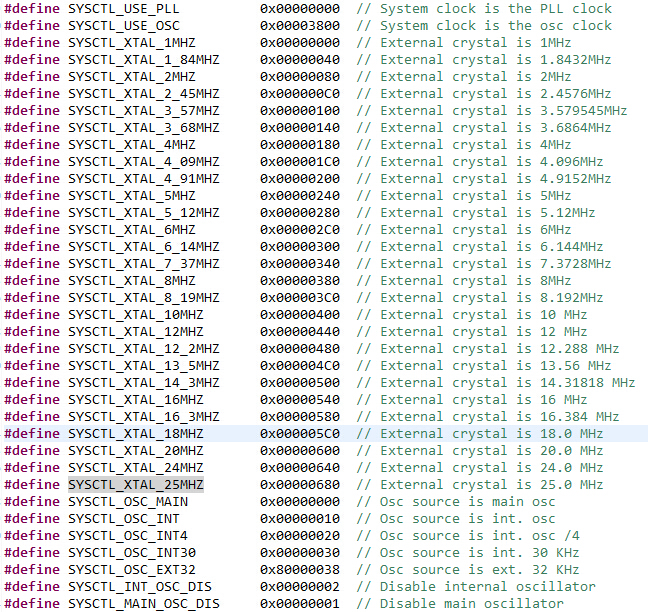
/******************************************************************** 函数: Clock_Init()* 描述: 配置使能系统时钟* 输入值:无* 返回值:无*****************************************************************/void Clock_Init(){SysCtlClockFreqSet((SYSCTL_XTAL_25MHZ |//外部时钟25MHzSYSCTL_OSC_MAIN |//OSC时钟源选择主振荡器作为OSCSYSCTL_USE_PLL |//采用锁相环PLL作为系统时钟源SYSCTL_CFG_VCO_480), //压控振荡器频率480MHzsysClock_Fr);//设定系统频率为sysClock_Fr}
- 该函数原型是
uint32_t SysCtlClockFreqSet(uint32_t ui32Config,uint32_t ui32SysClock);这里ui32Config表示时钟配置,例如外部时钟,是否使用PLL,时钟源设置等,它的其他可选项如下图:
1.2.2GPIO
- GPIO(General Purpose Input Output)通用输入输出端口,GPIO模块包括15个物理GPIO块,每个GPIO块对应一个单独的GPIO端口,每个端口对应多个管脚。
- GPIO要说分类的话应该算是一种数字化的信息传递方式,或者说操作模式,每个独立管脚可以输入也可以输出,用户可以通过指令修改(用库函数修改状态寄存器或直接修改寄存器)来配置数据方向操作,方向为输入时,数据寄存器是处在一种读取管脚状态的模式,对应方向输出时用户可以改变GPIO端口状态。
- 每一个管脚的状态独立,不会影响其它管脚的状态。
- 可以快速切换,每个时钟周期、实现一次变化。
- 我们要做的流水灯实验是按心情点亮板子TM4C1294上的八个led,他们的对应端口如下:
| 信号 | 端口 | 信号 | 端口 |
|---|---|---|---|
| LED0 | PF1 | LED1 | PF2 |
| LED2 | PF3 | LED3 | PL0 |
| LED4 | PL1 | LED5 | PL2 |
| LED6 | PL3 | LED7 | PL4 |
- 内部上电复位时所有GPIO管脚都被配置成无驱动模式,具体过程配合代码叙述。
/******************************************************************** 函数: LED_Init()* 描述: LED的配置及初始化* 输入值:无* 返回值:无*****************************************************************/void LED_Init(){//使能GPIOF和GPIOL模块SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOF);SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOL);//将8盏LED配置为输出模式(GPIO管脚方向)GPIOPinTypeGPIOOutput(GPIO_PORTF_BASE,GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3);GPIOPinTypeGPIOOutput(GPIO_PORTL_BASE,GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3|GPIO_PIN_4);}
1.3实现功能
- LED灯正着亮反着亮乱七八糟亮。
1.4实验代码
- 控制LED亮
/******************************************************************** 函数: LED_ON(uint8_t NumLED)* 描述: 点亮某一盏LED灯* 输入值:uint8_t NumLED* 返回值:无*****************************************************************/void LED_ON(uint8_t NumLED){switch(NumLED){case 0: GPIOPinWrite(GPIO_PORTF_BASE,GPIO_PIN_1,GPIO_PIN_1);break;case 1: GPIOPinWrite(GPIO_PORTF_BASE,GPIO_PIN_2,GPIO_PIN_2);break;case 2: GPIOPinWrite(GPIO_PORTF_BASE,GPIO_PIN_3,GPIO_PIN_3);break;case 3: GPIOPinWrite(GPIO_PORTL_BASE,GPIO_PIN_0,GPIO_PIN_0);break;case 4:GPIOPinWrite(GPIO_PORTL_BASE,GPIO_PIN_1,GPIO_PIN_1);break;case 5: GPIOPinWrite(GPIO_PORTL_BASE,GPIO_PIN_2,GPIO_PIN_2);break;case 6: GPIOPinWrite(GPIO_PORTL_BASE,GPIO_PIN_3,GPIO_PIN_3);break;case 7: GPIOPinWrite(GPIO_PORTL_BASE,GPIO_PIN_4,GPIO_PIN_4);break;default: ledclose();break; //让所有灯灭的一个函数}}
- 控制LED不亮
/******************************************************************** 函数: LED_OFF(uint8_t NumLED)* 描述: 不亮某一盏LED灯* 输入值:uint8_t NumLED* 返回值:无*****************************************************************/void LED_OFF(uint8_t NumLED){switch(NumLED){case 0: GPIOPinWrite(GPIO_PORTF_BASE,GPIO_PIN_1,0x00);break;case 1: GPIOPinWrite(GPIO_PORTF_BASE,GPIO_PIN_2,0x00);break;case 2: GPIOPinWrite(GPIO_PORTF_BASE,GPIO_PIN_3,0x00);break;case 3: GPIOPinWrite(GPIO_PORTL_BASE,GPIO_PIN_0,0x00);break;case 4: GPIOPinWrite(GPIO_PORTL_BASE,GPIO_PIN_1,0x00);break;case 5: GPIOPinWrite(GPIO_PORTL_BASE,GPIO_PIN_2,0x00);break;case 6: GPIOPinWrite(GPIO_PORTL_BASE,GPIO_PIN_3,0x00);break;case 7: GPIOPinWrite(GPIO_PORTL_BASE,GPIO_PIN_4,0x00);break;default: ledclose();break; //让所有等灭的一个函数}}
- 用到的一个延时函数
/******************************************************************** 函数: Delay(uint32_t CountMs)* 描述: 延时* 输入值: uint32_t CountMs* 返回值: 无*****************************************************************/void Delay(uint32_t CountMs){SysCtlDelay(CountMs*sysClock_Fr/3000);}
- 有了以上三个函数,在初始化和配置完毕后,就可以随意的控制八个LED了。
1.5实验结论
- 这是一个简单的实验,但是也是我入门的第一个实验,应该说是自从学会右键Open Declaration看库函数名,参数和句柄后,才终于有了点概念,现在的感觉,目前接触的一个模块一个模块的应用,会有问题,但去慢慢查总还是能搞出来。以前华哥说的话现在很有一番体会”首先,小灯跑起来后,剩下的就差不多了“。
- 其实对系统时钟和GPIO还有许多地方不理解:
- 目前遇到的模块都需要先启用一个时钟,现在都是统一使用一个系统时钟,对于分频和各种定时器还是一团乱麻。
- 板子上要调用什么资源首先要使能,对于GPIO口来说,使能是使能一整个模块,然后再是配置引脚,模块想象成一个基地址,管脚是其偏移地址。
- GPIO管脚可以配置为输入输出的模式,拉高电平或者低电平起什么效果跟板子上的外设本身的设定有关,也可以焊板子没有的外设上去。
- 由于引脚复用,外设的输入输出模式要调整为其它方式,这些函数基本都长这个样子:
void GPIOPin Type ADC (uint32_t ui32Port, uint8_t ui8Pins)void GPIOPin Type CAN (uint32_t ui32Port, uint8_t ui8Pins)void GPIOPin Type CIR (uint32_t ui32Port, uint8_t ui8Pins)void GPIOPin Type Comparatorvoid GPIOPin Type EPIvoid GPIOPin Type Ethernet LEDvoid GPIOPin Type Ethernet MIIvoid GPIOPin Type GPIOInputvoid GPIOPin Type GPIOOutput
实验二 矩阵按键
2.1实验目的
- 熟悉和掌握矩阵式键盘的工作原理、电路设计和软件编程方法。
- 熟悉和掌握矩阵键盘的行列扫描法
2.2实验原理
- 矩阵按键也是用的GPIO口,它有4行乘4列共16个按键,大概长这样:
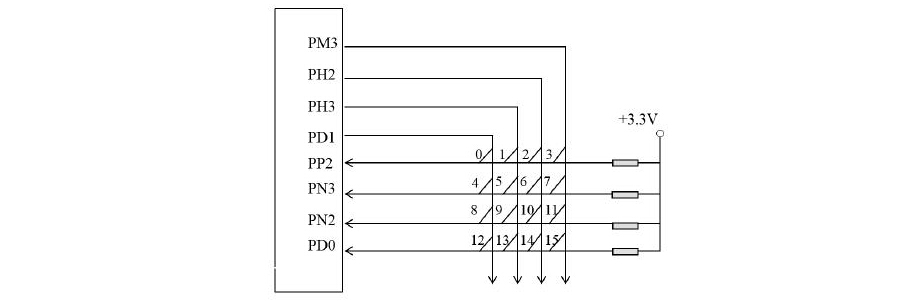
- 如图所示,虽然有16个按键,但是控制它的GPIO口只有4行4列共计8个。实验中我们把列配置为输入,行配置为输出,某一时刻只让一条列线处于低电平,其余列线均处于高电平,不停的轮循列,而当某一行有健按下时,该键所在的行变为低电平。当某行某列都为低电平时,该按键就会被判断是按下的。行和列的信号分配如下表:
| 信号 | 端口 | 信号 | 端口 |
|---|---|---|---|
| ROW1_IN | PP2 | COL1_OUT | PD1 |
| ROW2_IN | PN3 | COL2_OUT | PH3 |
| ROW3_IN | PN2 | COL3_OUT | PH2 |
| ROW4_IN | PD0 | COL4_OUT | PM3 |
- 软件消抖原理:检测到有键闭合后执行一个小延时,再检测一次还是按下,才是真的按下。当检测到按键释放后,也给一个小的延时,检测第二遍。这个延时时间要比抖动时间长,一般是5~20ms。
- 实验程序流程:
2.3实现功能
- 按下不同的矩阵按键,控制LED不同的闪烁情况。
2.4实验代码
2.4.1矩阵按钮初始化
/******************************************************************** 函数: Toggle_Init()* 描述: 配置使能矩阵按钮gpio口* 输入值:无* 返回值:无*****************************************************************/void Toggle_Init(){//使能引脚SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOP);SysCtlPeripheralEnable(SYSCTL_PERIPH_GPION);SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOD);SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOH);SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOM);//输入配置GPIOPinTypeGPIOInput(GPIOP, GPIO_PIN_2);GPIOPinTypeGPIOInput(GPION, GPIO_PIN_2|GPIO_PIN_3);GPIOPinTypeGPIOInput(GPIOD, GPIO_PIN_0);//输出配置GPIOPinTypeGPIOOutput(GPIOD, GPIO_PIN_1);GPIOPinTypeGPIOOutput(GPIOH, GPIO_PIN_2|GPIO_PIN_3);GPIOPinTypeGPIOOutput(GPIOM, GPIO_PIN_3);//设置行都为高电平,列为低电平R1h();R2h();R3h();R4h();C1l();C2l();C3l();C4l();}
2.4.2按键扫描函数
/******************************************************************** 函数: Row_Scan()* 描述: 扫描行或列返回电平被拉低的行/列* 输入值:无* 返回值:uint8_t*****************************************************************/uint8_t Row_Scan(){uint8_t r0,r1,r2,r3;r0 = GPIOPinRead(GPIOP, GPIO_PIN_2);r1 = GPIOPinRead(GPION, GPIO_PIN_2);r2 = GPIOPinRead(GPION, GPIO_PIN_3);r3 = GPIOPinRead(GPIOD, GPIO_PIN_0);if(r0==0x00){return 0;}else if(r1==0x00){return 1;}else if(r2==0x00){return 2;}else if(r3==0x00){return 3;}else return 4;}
2.4.3识别哪一行按键按下
/******************************************************************** 函数: Toggle_Loop()* 描述: 这里做的是检测被按下的行,本来是套了两个Row_Scan分别检测行列* 输入值:无* 返回值:无*****************************************************************/void Toggle_Loop(){ledclose();while(true){switch(Row_Scan()){case 0:led0(); break;case 1:led2(); break;case 2:led4(); break;case 3:ledrun(1); break;default:ledclose();break;}Delay(24);}}
2.5实验结论
- 这次实验最重点的部分就是按键的识别与检测,其他的和实验一里GPIO的原理并无区别。
- 但是不知道为什么用这种方式写起来没法读取4x4十六个按钮,怀疑是轮循列速度和扫描速度之间存在冲突。
实验三 PWM呼吸灯
3.1实验目的
- 熟悉和掌握PWM模块的工作原理、模块结构和软件编程方法。
- 学会调整输出周期和占空比
3.2实验原理
- PWM(Pulse-Width Modulation)可以理解为周期性的输出一连串高电平或低电平的序列,其中高电平视为1,低电平视为0,这样就将数字信号和模拟电路联系起来,实现了控制实际电路的功能。
- 占空比是一串理想的脉冲周期序列中正脉冲的持续时间与脉冲周期的比值。
- 死区时间一般是指控制不到的时间域。在PWM中,死区时间实在输出时,为了避免上下管因为开关速度问题发生同时导通而设置的一个保护时段。通常也指PWM的响应时间。死区时间设置的大,PWM模块更可靠,但是会导致输出波形失真并且降低输出效率。
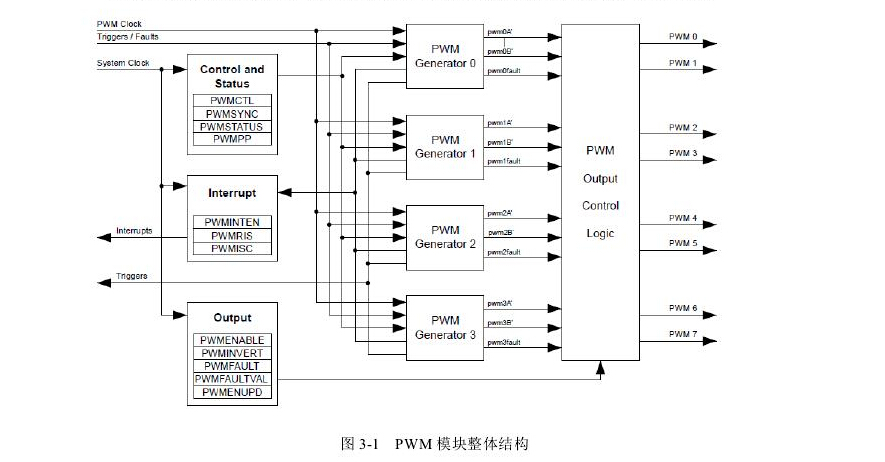
板子上提供4个PWM发生器模块和一个控制模块,一共有8路PWM信号输出。每个PWM发生器输出2路PWM信号,分别是PWMA和PWMB,他们的可以选择是否共享时钟和频率,整个四个PWM模块之间的关系如下图所示:
实验程序流程:
3.3实现功能
- 通过PWM循环改变占空比,实现呼吸灯。
3.4实验代码
3.4.1PWM模块初始化
/******************************************************************** 函数: PWM_Init()* 描述: PWM初始化* 输入值:无* 返回值:无*****************************************************************/void PWM_Init(){SysCtlPeripheralEnable(SYSCTL_PERIPH_PWM0);PWMGenConfigure(PWM0_BASE, PWM_GEN_0|PWM_GEN_1,PWM_GEN_MODE_DOWN | PWM_GEN_MODE_NO_SYNC);//配置系统时钟和配置重载值(如蜂鸣器,要注意范围2khz-4khz)PWMGenPeriodSet(PWM0_BASE, PWM_GEN_0|PWM_GEN_1, 10000);PWMPulseWidthSet(PWM0_BASE,PWM_OUT_1|PWM_OUT_2|PWM_OUT_3|PWM_OUT_4|PWM_OUT_5|PWM_OUT_6|PWM_OUT_7|PWM_OUT_0,50);//PWM输出使能PWMOutputState(PWM0_BASE, PWM_OUT_0_BIT |PWM_OUT_1_BIT |PWM_OUT_2_BIT | PWM_OUT_3_BIT, true);//PWM把发生器使能PWMGenEnable(PWM0_BASE, PWM_GEN_0);PWMGenEnable(PWM0_BASE, PWM_GEN_1);}
3.4.2呼吸灯实现
/******************************************************************** 函数: breathLED_run()* 描述: 使呼吸灯闪烁,这里用循环让占空比从变大到变小,再利用PWMPulseWidthSet() 每次循环改变占空比形成亮灭。* 输入值:无* 返回值:无*****************************************************************/void breathLED_run(){while(1){for(ui32Loop=0;ui32Loop<1000;ui32Loop++){;}PWMPulseWidthSet(PWM0_BASE, PWM_OUT_1,PWMPulseWidth);PWMPulseWidthSet(PWM0_BASE, PWM_OUT_2,PWMPulseWidth);PWMPulseWidthSet(PWM0_BASE, PWM_OUT_3,PWMPulseWidth);PWMPulseWidth += flip;if(PWMPulseWidth >= 9990){flip = -5;}else if(PWMPulseWidth <= 50){flip = 5;}}}
3.5遇到的问题和解决办法
- PWM的初始化将LED0,1,2通过引脚复用配置成PWM输出,所以此时这三个led不再做为gpio口工作,再要以gpio口控制他们,需要将对应端口重新配置。
3.6实验结论
- PWM使用时要首先将PWM模块本身使能,然后再将想要控制的外设使能并配置为PWM输入模式。
- 每一路PWM波可以控制一个外设也可以控制多个外设,我们实验中只适用了其中的一路,而如果我们需要小灯或蜂蜜器以不同的频率和节奏亮灭(响起),一路输出就不能做到。
- 板子上的管脚复用情况是已经定好的,也就是说如果要利用pwm波,首先物理模块必须连在一起,这样库函数里才有对应的句柄。另外pwm本身要记的函数比较多,但是在配置好后最常用的还是PWMPulseWidth。
实验四 中断
4.1实验目的
- 了解单片机里中断的概念。
- 懂得声明中断向量,中断函数,改变中断优先级,最终学会使用中断。
4.2实验原理
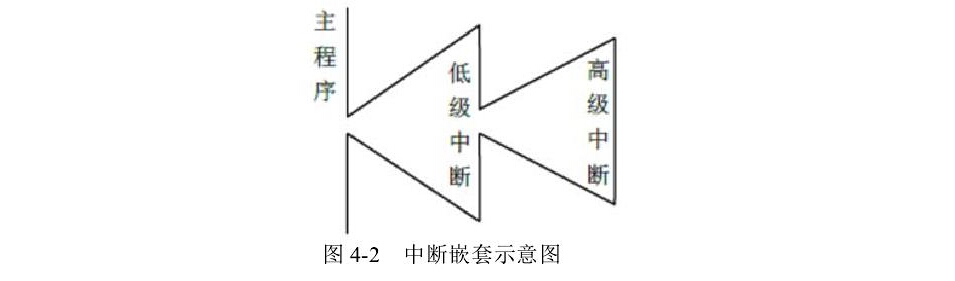
- 中断,即是是当前程序跳出,执行中断跳出。执行完当前中断后再返回去。中断可循环嵌套,高级中断可以打断低级中断,反过来则不行。原理如图所示:
- TM4C1294有114个中断源,八个中断优先级,如果没有设置优先级,则自动按中断向量表的顺序,小的优先来排列。
- 使用中断时,照例要初始化系统时钟,然后是使能各个需要用到的外设,在向量表里改变中断向量,声明并编写中断函数,其中可以产生中断的外设也有相应的库函数,要利用这些函数做一个外设关于中断的初始化,由此开启相应中断,因此要包含头文件
"interrupt.h"。
4.3实现功能
- 利用之前的矩阵按钮,达到按下按钮控制不同led亮灭效果。
4.4实验代码
4.4.1中断的配置及初始化
/******************************************************************** 函数: Handler_Init()* 描述: 开启中断* 输入值:无* 返回值:无*****************************************************************/void Handler_Init(){SysCtlGPIOAHBEnable(SYSCTL_PERIPH_GPIOD);//矩阵按键第四行SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOD);GPIOPinTypeGPIOInput(GPIO_PORTD_BASE,GPIO_PIN_0);GPIOIntTypeSet(GPIO_PORTD_BASE,GPIO_PIN_0,GPIO_LOW_LEVEL);GPIOIntEnable(GPIO_PORTD_BASE,GPIO_INT_PIN_0);//定时器SysCtlPeripheralEnable(SYSCTL_PERIPH_TIMER0);TimerConfigure(TIMER0_BASE, TIMER_CFG_SPLIT_PAIR | TIMER_CFG_B_PERIODIC);TimerIntEnable(TIMER0_BASE, TIMER_TIMB_TIMEOUT);TimerEnable(TIMER0_BASE, TIMER_B);TimerLoadSet(TIMER0_BASE, TIMER_B, sysClock_Fr/2000 );//优先级设置,如下所示,优先级越高数字上越小IntPrioritySet(INT_GPIOD,0x20);IntPrioritySet(INT_TIMER0B,0x00);IntEnable(INT_GPIOD); //开启相应中断向量/*3.开启总中断*/IntMasterEnable();}
4.4.2呼吸灯实现
/******************************************************************** 函数: GPIOD_Handler()* 描述: 矩阵按键第四行的中断函数* 输入值:无* 返回值:无*****************************************************************/void GPIOD_Handler(){uint32_t Status;Status=GPIOIntStatus(GPIO_PORTD_BASE,true);if(Status==GPIO_INT_PIN_0){ledclose();//ledon(0);}GPIOIntClear(GPIO_PORTD_BASE,Status);}
4.4.3Timer的中断函数
/******************************************************************** 函数: GPIOD_Handler()* 描述: 利用Timer实现一毫秒扫描一次键盘减轻cpu负担* 输入值:无* 返回值:无*****************************************************************/void Timer_Handler(){unsigned long status;status=TimerIntStatus(TIMER0_BASE,true);if(status==TIMER_TIMB_TIMEOUT){counter++;if(counter==10){counter=1;switch(Row_Scan()){case 0:{LED_ON(1);Delay(24); break;}case 1:{LED_ON(2);Delay(24); break;}case 2:{LED_ON(3);Delay(24); break;}case 3:{LED_ON(4);Delay(24); break;}default:ledclose(); break;}}TimerIntClear(TIMER0_BASE, TIMER_TIMB_TIMEOUT);}}
4.5遇到的问题和解决办法
- 一开始总是会遇到一个问题,因为把函数写在了中断里,main里只有各个模块的初始化,则当debug运行函数之后,总是跑一下就立刻停止了。那其实是因为程序跑完了,符合逻辑。解决办法在main里加入一个空的while(1)即可。
4.6实验结论
- 中断是单片机里比较重要的一个概念,除了我们自己加的中断,本身板子就有些固有的中断。
- 中断是一定有优先级这个属性的,所以在处理一个工程中平行的程序关系上不能使用。
- 在定时器中断的情况,当使能之后,定时器自动开始计时,它跑起来并不受cpu控制,而因为跑触发的中断函数则是受cpu控制的。
实验五 和米字管
5.1实验目的
- 了解总线通信原理
- 学会用C语言模拟时序
- 学会查找和利用板子上的资源,控制米字管
5..2实验原理
5.2.1
- 是一种简单的双向一线制串行通信总线。多个符合总线标准的器件都可以通过同一条总线进行通信,而不需要额外的地址译码器。总线应用中主要涉及如下几个基本概念:
- 发送器:本次传送中发送数据(不包括地址和命令)到总线的器件。
- 接收器:本次传送中从总线接收数据(不包括地址和命令)的器件。
- 主机:初始化发送,产生时钟信号和终止发送的器件,它可以是发送器或接收器,主机通常是微控制器。
- 从机:被主机寻址的器件,他可以是发送器或接收器。
- 总线仅适用两个信号:SDA和SCL。SDA是双向串行数据线,SCL是双向串行时钟线。
| SDA | SCL | 总线状态 |
|---|---|---|
| 高电平 | 高电平 | 空闲(stop之后) |
| 高到低 | 高电平 | START(之后视为忙状态) |
| 低到高 | 高电平 | STOP |
上表所示总线起止条件如图所示:

而每传送一个命令所包含的数据如下:一个起始位,从机地址,ACK校验位,命令字,ACK校验位,数据,最后再是一个ACK校验位,由此可以改变帧头帧尾制定通信协议。它们形式如下:
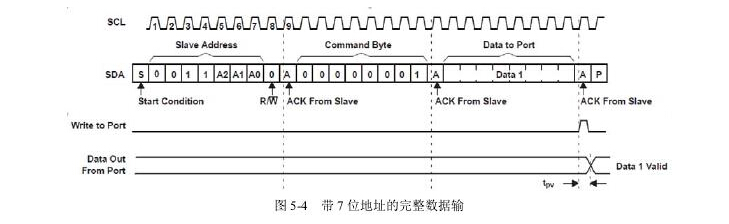
简单地说是一种总线,它的接收器和发射器都在总线上接收发送数据,也即分别通过SCL和SDA线接入总线。一定有主机和从机。板子上的资源和特性如下:
- PCA9557芯片、ADXL345芯片上均有I2C总线接口。每条总线有一条SDA双向串行数据线和一条SCL双向串行时钟线。数据传输速率可根据需要选择高速或低速。
- 总线仅由2根信号线组成,可节省芯片I/O、节省PCB面积、节省线材成本等等。
- 总线协议简单容易实现协议的基本部分相当简单,因此在芯片内部以硬件的方法实现部件的逻辑是容易的。即使MCU内部没有硬件的总线接口,也能够方便的利用开漏的I/O(如果没有,可用准双向I/O代替)来模拟实现。
- 支持的器件多主流半导体公司生产的大量器件带有I2C器件提供了广阔的空间。在现代微控制器设计当中总线接口已经成为标准的重要片内外设之一。
- 总线上可同时挂接多个器件同一条总线可以挂接多个器件,器件之间靠不同的编址来区分的,不需要附加的I/O线或地址译码部件。
- 总线可裁减性好在原有总线连接的基础上可以随时新增或者删除器件。用软件可以容易实现线的自动检功能,能够及时发现总线上的变动。
- 总线电气兼容性总线规定器件之间以开漏I/O相连接,只要选取适当的上拉电阻即能实现不同逻辑电平之间的互联通信,而不需要额外的转换。
- 支持多种通信方式一主多从、多主机通信及广播模式等。
- 通信速率高并兼顾低速通信总线标准传输速率为100kbps(每秒100K位)。在快速模式下为400kpbs。按照后来修订的版本,位速率可高达3.4Mbps。总线的通信速率也可以低至几kpbs以下,用以支持低速器件(比如软件模拟的实现)或者用来延长通信距离。从机也可以再接受和相应一个字节后使SCL线保持低电平迫使主机进入等待状态直到从机准备好下一个要传输的字节。
- 有一定的通信距离总线通信距离通常为几米到十几米。通过降低传输速率、屏蔽、中断方法,通信距离也可延长到数十米乃至数百米以上。
- PCA9557芯片、ADXL345芯片上均有I2C总线接口。每条总线有一条SDA双向串行数据线和一条SCL双向串行时钟线。数据传输速率可根据需要选择高速或低速。
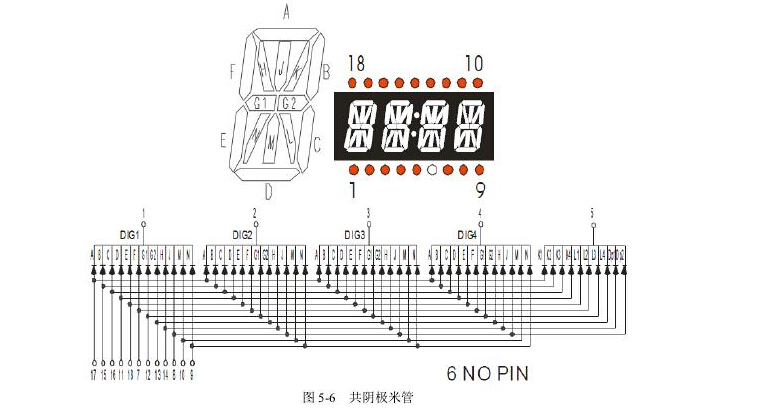
5.2.2米字管
- 米字管是一种半导体发光器件,其基本单元是发光二极管,实验中使用的EK-TM4C1294XL实验开发板上,有四个米字管和两个冒号,每个米字管有14个发光二极管组成。这些米字管由三个PCA9557芯片控制,其中第一个芯片负责选择点亮哪个二极管,这里的的管脚可以总结为4+1的形式,前四个管脚分别控制对应米字管上的ABCDEF,HJMN,G1,G2等二极管,第五个控制特殊管脚(每个米字管上的k,l)和两个冒号。当对应引脚为高电平时,相应段就会点亮。
| 芯片 | 端口 | 管脚 |
|---|---|---|
| U4 | P1 | 2 |
| P2 | 3 | |
| P3 | 4 | |
| P4 | 5 | |
| P5 | 1 | |
| U5 | P1 | 8 |
| P2 | 9 | |
| P3 | 10 | |
| P4 | 11 | |
| P5 | 12 | |
| P6 | 13 | |
| P7 | 14 | |
| U6 | P1 | 16 |
| P2 | 17 | |
| P3 | 18 | |
| P4 | 7 | |
| P5 | 15 |
- 实验中使用共阴极米字管,总共四个加两个冒号,它在板子上大约长这样:
- 它的硬件原理图如下:
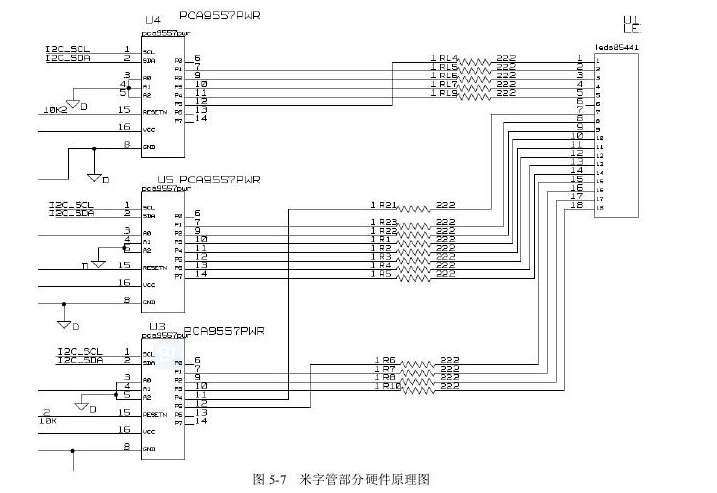
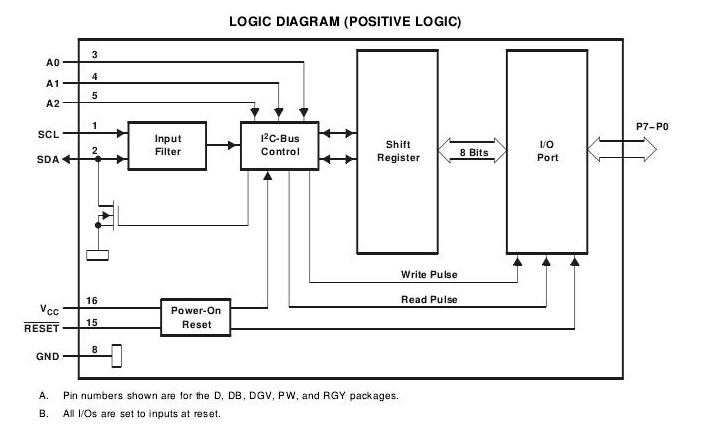
- 从上图可以看到,有三个芯片在控制这拉高拉低电平,芯片结构如下:
5.2.3流程图
- 所以本次实验流程图大致如下:
5.3实现功能
- 控制米字管稳定的亮起特定数字字母。
5.4实验代码
5.4.1预设数字码段
static const char tubeDigital[10][2]={ // SegmLow, SegHigh{ 0x10, 0x3E }, // 0{ 0x00, 0x18 }, // 1{ 0x70, 0x2C }, // 2{ 0x70, 0x26 }, // 3{ 0x60, 0x32 }, // 4{ 0x70, 0x16 }, // 5{ 0x70, 0x1E }, // 6{ 0x00, 0x26 }, // 7{ 0x70, 0x3E }, // 8{ 0x70, 0x36 }, // 9};
5.4.2中断的配置及初始化
/******************************************************************** 函数: I2C_Init()* 描述: I2C初始化* 输入值:无* 返回值:无*****************************************************************/void I2C_Init(){SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOB);/*B2设置为SCL时钟线,B3设置为SDA串行数据线*/GPIOPinTypeI2C(GPIO_PORTB_BASE, GPIO_PIN_2 | GPIO_PIN_3);/*设置B的引脚复用功能为SCL和SDA*/GPIOPinConfigure(GPIO_PB2_I2C0SCL);GPIOPinConfigure(GPIO_PB3_I2C0SDA);GPIOPinTypeI2CSCL(GPIO_PORTB_BASE, GPIO_PIN_2);GPIOPinTypeI2C(GPIO_PORTB_BASE, GPIO_PIN_3);SysCtlPeripheralEnable(SYSCTL_PERIPH_I2C0); //使能I2C0模块/* 设I2C主机模式, 使用系统时钟, 400kbps的快速模式(false普通模式100Kbps)*/I2CMasterInitExpClk(I2C0_BASE,1000000, true);I2CMasterEnable(I2C0_BASE); //使能I2C0主机模式I2CSlaveEnable(I2C0_BASE);//使能I2C从机模式}
5.4.3米字管芯片初始化
/********************************************************************* 函数: PCA9557_Init()* 描述: PCA9557初始化* 输入值:无* 返回值:无******************************************************************/void PCA9557_Init(){ uint8_t SendBuff[2] = {PCA9557_REG_CONFIG, 0x00};//PCA9557_REG_CONFIG(COMMAND BYTE)配置成读写模式I2C_SendBuff(I2C0_ADDR_TUBE_SEL, SendBuff, 2);//U21管选 I2C0_ADDR_TUBE_SEL (SLAVE ADDR)I2C_SendBuff(I2C0_ADDR_TUBE_SEG_LOW, SendBuff, 2);//U22管选 I2C0_ADDR_TUBE_SEG_LOW(SLAVE ADDR)I2C_SendBuff(I2C0_ADDR_TUBE_SEG_HIGH, SendBuff, 2);//U23管选 I2C0_ADDR_TUBE_SEG_HIGH(SLAVE ADDR)}
5.4.4点亮米字管
/******************************************************************** 函数: MZG_run()* 描述: 点亮米字管为a,b,c,d(在while里的动态显示)* 输入值:uint8_t a,b,c,d* 返回值:无*****************************************************************/void MGZ_run(){int t=50;//这个延时时间I2C_ClearTheTube(); //清屏I2C_U4TubeSelect(~0x20); //选择数字管1I2C_U5TubeLowPinControl(tubeDigital[a][0]);//拉低U5的引脚I2C_U3TubeHighPinControl(tubeDigital[a][1]);//拉高U3引脚DelayMs(t);I2C_ClearTheTube(); //清屏I2C_U4TubeSelect(~0x02); //选择数字管2I2C_U5TubeLowPinControl(tubeDigital[b][0]);//拉低U5的引脚I2C_U3TubeHighPinControl(tubeDigital[b][1]);//拉高U3引脚DelayMs(t);I2C_ClearTheTube(); //清屏I2C_U4TubeSelect(~0x04); //选择数字管3I2C_U5TubeLowPinControl(tubeDigital[c][0]);//拉低U5的引脚I2C_U3TubeHighPinControl(tubeDigital[c][1]);//拉高U3引脚DelayMs(t);I2C_ClearTheTube(); //清屏I2C_U4TubeSelect(~0x08); //选择数字管4I2C_U5TubeLowPinControl(tubeDigital[d][0]);//拉低U5的引脚I2C_U3TubeHighPinControl(tubeDigital[d][1]);//拉高U3引脚DelayMs(t);}
5.5遇到的问题和解决办法
- 米字管整个的闪烁严重,调高系统频率。
- 米字管每一时刻轮流一个特别亮的闪烁,改变减小延时t
5.6实验结论
- 米字管这个东西,看起来很简单,原理也很简单。
- 结果实际用起来麻烦的不得了。主要问题是的频率,高于一定值,就无法正常读取(据说10M实际测试,一块板子8M就不行一块板子9M就不行)如果是静态显示还好,动态刷新起来就各种问题。还没想好怎么分频,于是当他和别的外设共事的时候,简直是灾难。
- 选管清屏的函数因为完全用的是学长的函数,就当他们是库函数了,没有写在实验报告中。
实验六 ADC和UART
6.1实验目的
- 学习ADC模块原理和串口通信的原理
- 学习使用ADC模块转化外设传感器数据变为可调用的数字信息
- 将信息用UART输出
6.2实验原理
6.2.1ADC
6.2.1.1结构特点
- 模数转换器(Analog-to-Digital Converter,ADC)将连续的模拟电压信号转换为离散的数字量的外设。TM4C1294微控制器内置两个相同的12位精度ADC模块(ADC0和ADC1),共用相同的20个模拟输入通道和一个内部温度传感器。
- 每个ADC模块包含四个可编程序列发生器,无需控制器干预可自动完成对多个模拟器输入源的采样,每个采样序列发生器各自带有相应长度的FIFO,并都可以灵活配置其输入源、触发事件、中断产生、序列发生器的优先级等内容。
- 每个ADC模块提供8个数字比较器,每个数字比较器可以将AC转换结果数值与2个用户定义的门限值比较,确定信号的工作范围。
- ADC0和ADC1工作相互独立,模块内部自带移相器,可以设定采样的滞后相角。
- ADC可以用以下机制触发:
- 控制器(软件)触发
- 定时器触发
- 模拟比较器触发
- PWM
- GPIO
- 可配置为单端输入或差分输入。
- 模拟部分的电源地与数字电源地相互独立。
6.2.1.2初始化与配置
- ADC模块使用之前要进行初始化与配置,包括ADC模块的初始化和采样序列发生器的配置两个部分。
- ADC模块,需要启用ADC时钟,禁用待用模拟输入脚的模拟隔离电路,可重新配置采样序列发生器优先级。(具体代码见6.3)
6.2.1.3功能描述
- 采样序列发生器(Sample Sequencer,SS)
每个采样序列都是由一组编程的连续采样组成,因此ADC模块可以自动从多个输入源采集数据,可配置的参数包括选择输入源和输入模式(单端输入或差分输入)、采样结束时是否产生中断,是否是队列中最后一个采样动作的标识符等。
| 序列发生器 | 采样数 | FIFO深度 |
|---|---|---|
| SS3 | 1 | 1 |
| SS2 | 2 | 4 |
| SS1 | 3 | 4 |
| SS0 | 8 | 8 |
SS处理采样控制和数据采集,所有序列发生器的实现方式相同,但采样数和FIFO深度不同。每个FIFO单元均为一个32位的字,低12位包含的是转换结果。
- 模数转换器
模数转换器采用逐次逼近寄存器(SAR)架构实现低功耗,高精度的十二位A/D转换。ADC模块同时从3.3V模拟电源和1.2V数字电源取电。
//配置PE3口为ADC单端采样模式,使用采样序列3采样内置温度感应器,处理器信号触发方式。void main(){int pui32ADC0Value;//初始化系统时钟g_ui32SysClock=SysCtlClockFreqSet((SYSCTL_XTAL_25MHZ|SYSCTL_OSC_MAIN|SYSCTL_USE_PLL|SYSCTL_CFG_VCO_480),120000000);//开启ADC0时钟SysCtlPeripheralEnable(SYSCTL_PERIPH_ADC0);//使能温度传感器PE3SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOE);//将PE3口配置成AD输入模式GPIOPinTypeADC(GPIO_PORTE_BASE,GPIO_PIN_3);//使用采样序列3来采样,ADC_TRIGGER_PROCESSOR为设定触发方式为控制器触发,由ADCProcessorTrigger()配合使用。ADCSequenceConfigure(ADC0_BASE,3,ADC_TRIGGER_PROCESSOR,0);//配置采样序列3的步骤0,配置模拟通道0(ADC_CTL_CH0)、采样结束产生中断(ADC_CTL_IE),转化结束后告诉ADC逻辑转化结束ADCSequenceStepConfigure(ADC0_BSE,3,0,ADC_CTL_CH0|ADC_CTL_IE|ADC_CTL_END);//使能采样序列3ADCSequenceEnable(ADC0_BASE,3);//开始采样前先清除采样序列3产生的中断ADCIntClear(ADC0_BASE,3);while(1){//触发ADC0SS3。ADCProcessorTrigger(ADC0_BASE,3);//等待转换结束while(!ADCIntStatus(ADC0_BASE,3,false)){}//清除中断标志ADCIntClear(ADC0_BASE,3);//读取ADC0采样序列SS3的转化值,将结果存在pui32ADC0ValueADCSequenceDataGet(ADC0_BASE,3,pui32ADC0Value);//延时SysCtlDelay(g_ui32Sysclock/12);}}
- APIfuntion&Pinmap
#include "inc/hw_types.h"#include "inc/hw_memmap.h"#include "driverlib/sysctl.h"#include "driverlib/pin_map.h"#include "driverlib/gpio.h"#include "inc/hw_gpio.h"#include "driverlib/adc.h"
6.2.2UART
UART(Universal Asynchronous Receiver/Transmitter), 异步串行通信接口,它可以实现数据的并串行转换,相对于同步模式,异步模式不需要一个专门的时钟信号来控制数据的收发,因此发送数据时位与位之间的间隙可以任意改变,但是并不是说不需要时钟信号,而是通过系统时钟或全局备用时钟产生一个可编程的波特时钟来控制发送数据。
- 接收处理器内部的并行数据,通过串行发送总线UnTX以异步通信的方式发送出去
- 输入接收总线UnRX上的串行数据,转换为并行数据后返回给处理器处理
- 数据接收或处理完后,经过T/R缓冲区FIFO,
6.2.2.1发送/接收
标准的异步通信包括起始位,停止位,奇偶校验位。控制逻辑输出串行位流时,最先输出起始位,然后输出若干数据位(最低有效位在前),奇偶校验位和停止位。
接收逻辑单元在检测到有效的起始脉冲后,对接收到的串行位码流进行串-并转换,在接收过程中还要进行溢出错误检测、奇偶校验、帧错误检测、线终止检测、并将这些状态随数据一同写入接收FIFO中。
6.2.2.2波特率的产生
波特率分频系数是由16位整数部分和6位小数部分组成的22位二进制数,由此决定位时间,其中整数由UART波特率分频值整数(UARTIBRD)寄存器加载,小数通过UART波特率分频值小数(UARTFBRD)寄存器加载。波特率分频值(BRD)和系统时钟之间关系如下:
BRD=BRDI+BRDF=UARTSysClk/(ClkDiv*波特率)
式中UARTSysClk是连接到UART的系统时钟,ClkDiv是一个常数,取值为16或8(对应UARTCTL寄存器里第五位HSE=0/1,因此UART模块产生的内部波特率参考时钟频率总为波特率的8或16倍,分别称为)。默认情况下该系统时钟为‘时钟控制’中描述的主系统时钟,6位小数部分(寄存器[UARTFBRD]里[DIVFRAC]位域的值)计算方法如下:
UARTFBRD[DIVFRAC]=integer(BRDF*64+0.5)
即将波特率除数的小数部分乘64,加0.5以抵消舍入误差。需注意的是,梗概波特率除数之后,必须写一次(高字节)UARTLCRH寄存器,更改内容才会生效。
6.2.2.3初始化和配置
uart有8个模块,其中uart0是我们要用到的,它有调制解调器的功能(调制解调器流控制和调制解调器状态)//UART0使用PA0,PA1两个引脚,因此要使能GPIOA模块。
//UART0使用PA0,PA1两个引脚,首先使能GPIOA模块SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);//GPIO管脚复用,所以要对PA0,PA1两个引脚功能进行选择,这里将他们选择为执行UART0模块功能GPIOPinConfigure(GPIO_PA0_U0RX);//PA0用于接收数据GPIOPinConfigure(GPIO_PA1_U0TX);//PA1用于发送数据//将PA0,PA1作为UART功能使用前进行配置GPIOPinTypeUART(GPIO_PORTA_BASE,GPIO_PIN_0|GPIO_PIN_1);UARTStdioConfig(0,115200,g_ui32SysClock);
- APIfunction & Pinmap
//sysctl.h//使能外设模块基址void SysCtlPeripheralEnable(uint32_t ui32Peripheral);//函数的定义和ui8Pins在gpio.h//ui32PinConfig在pin_map.h,ui32Port在hw_mammap.h//GPIOPinConfigure()一般和GPIOPinType...()一起使用来配置引脚。void GPIOPinConfigure(uint32_t ui32PinConfig);void GPIOPinTypeUART(uint32_t ui32Port, uint8_t ui8Pins);
6.3实现功能
- 用ADC模块采集滑动变阻器滚轮阻值
6.4实验代码
6.4.1ADC和滚轮的初始化
/******************************************************************** 函数: ADC_Init()* 描述: 初始化ADC0序列3和滚轮* 输入值:无* 返回值:无*****************************************************************/void ADC_Init(){// 初始化ADC0/PD7 AIN4 共20通道最大AIN19 分辨率为12bit 最大值4096SysCtlPeripheralEnable(SYSCTL_PERIPH_ADC0); //可选两个模块 ADC0和ADC1SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOD);GPIOPinTypeADC(GPIO_PORTD_BASE, GPIO_PIN_7);ADCSequenceConfigure(ADC0_BASE, 3, ADC_TRIGGER_PROCESSOR, 0);ADCSequenceStepConfigure(ADC0_BASE, 3, 0, ADC_CTL_CH4 | ADC_CTL_END | ADC_CTL_IE);ADCSequenceEnable(ADC0_BASE, 3);ADC0_HandlerFlag = false; //中断未发生}
6.4.2数据采集并用串口输出
/******************************************************************** 函数: ADC_work()* 描述: 数据采集,转化并用串口输出* 输入值:无* 返回值:无*****************************************************************/void ADC_work(){uint32_t ADC0_SS3v;uint32_t ADC0_result;ADCProcessorTrigger(ADC0_BASE, 3);while(!ADCIntStatus(ADC0_BASE, 3, false)) ;ADCSequenceDataGet(ADC0_BASE, 3, &ADC0_SS3v);ADC0_result=(ADC0_SS3v * 3.3 *1000)/4096;UARTprintf("V:%04d \n ", ADC0_result);}
6.5实验结论
- 这个书上有原例子,主要要注意ADC模块里采集序列的概念。
实验七 三轴加速度传感器
7.1实验目的
- 依旧是通信,这次是用控制板子上的三轴加速度传感器ADXL345。
- 这次不用串口,而是通过得到的数据识别板子的姿态。因为ADXL345本身就会把得到的数据以数字形式存放在寄存器里,所以直接读取即可,不需要用到模数转换ADC模块。
- 学会单步观察参数调节程序。
- 需要用到模块:ADXL345,。
7.2实验原理
- 加速度传感器ADXL345可以测量xyz三个方向的加速力。可以改变分辨率。
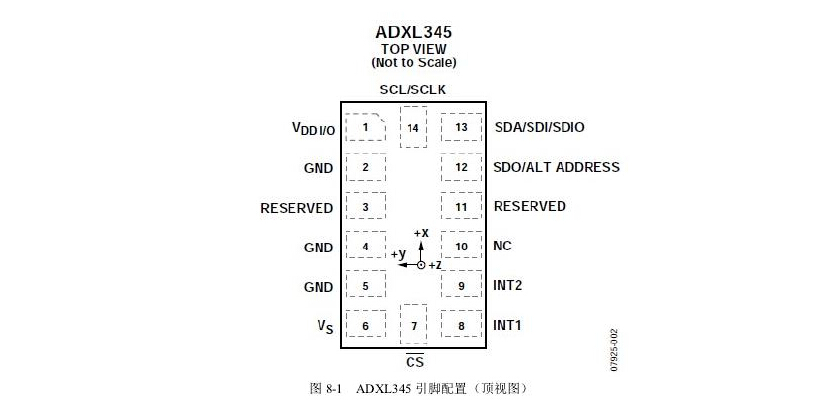
- 引脚功能描述如下
| 引脚编号 | 引脚名称 | 描述 |
|---|---|---|
| 1 | Vdd | 数字接口电源电压 |
| 2 | GND | 该引脚必须接地 |
| 3 | RESERVED | 保留。该引脚必须连接到VC或者保持断开 |
| 4 | GND | 该引脚必须接地 |
| 5 | GND | 该引脚必须接地 |
| 6 | VC | 电源电压 |
| 7 | CS | 片选 |
| 8 | INT1 | 中断1输出 |
| 9 | INT2 | 中断2输出 |
| 10 | NC | 内部不连接 |
| 11 | RESERVED | 保留。该引脚必须接地或保持断开 |
| 12 | SDO/ALT ADDRESS | 串行数据输出(SPI4线)备用I2C地址选择 |
| 13 | SDA/SDI/SDIO | 串行数据(I2C)串行数据输入(SPI4)/串行数据输入和输出(SPI3) |
| 14 | SCL/SCLK | 串行通信时钟,SCL为I2C时钟SCLK为SPI时钟 |
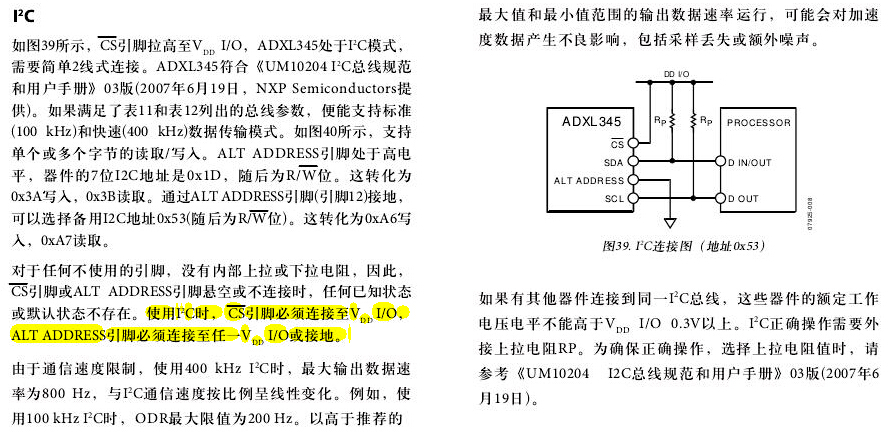
I2C状态下的引脚配置
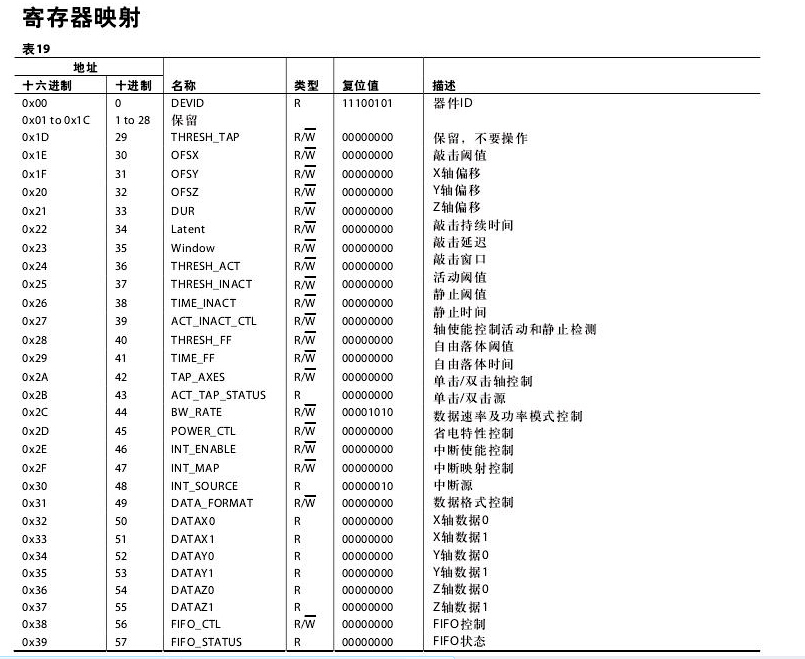
芯片的寄存器信息
7.3实现功能
- 改变板子姿态控制LED相应改变
7.4实验代码
/******************************************************************** 函数: ADXL345_run()* 描述: 读取处理加速度器寄存器数据,识别板子十种不同姿态* 输入值:无* 返回值:无*****************************************************************/void ADXL345_run(){ADXL345_Read(DataXYZ); //连续6次分别读取0x32-0x37中的数据。ADXL345_DataProcess(DataXYZ,DataMg); //对数据进行处理if((DataMg[0] == OneG)&&(DataMg[3]== Positive)){ ledclose(); LED_ON(4); }else if((DataMg[0] == OneG)&&(DataMg[3]== Negative)){ ledclose();LED_ON(0); }else if((DataMg[1] == OneG)&&(DataMg[4]== Negative)){ ledclose(); LED_ON(6); }else if((DataMg[1] == OneG)&&(DataMg[4]== Positive)){ ledclose(); LED_ON(2); }else if((DataMg[2] == OneG)&&(DataMg[5]== Negative)){ ledclose(); }//*************************************************************8else if((DataMg[3]== Negative)&&(DataMg[4]== Negative)){ ledclose(); LED_ON(7); }else if((DataMg[3]== Negative)&&(DataMg[4]== Positive)){ ledclose(); LED_ON(1); }else if((DataMg[3]== Positive)&&(DataMg[4]== Positive)){ ledclose(); LED_ON(3); }else if((DataMg[3]== Positive)&&(DataMg[4]== Negative)){ ledclose(); LED_ON(5); }}
7.5实验结论
- 学长完成了大部分的工作,我们主要做的是观察参数之间的关系,改变读取参数后板子的相应程序。
- 仅仅是识别姿态的话,读取DATAX0(0x32)~DATAZ1(0x37)就可以了。因为板子比较小,所以变动不大的情况下不需要看它的变化值,而仅需读取它的当前值。如果是把它放在一个相对较大的物体上,则应该去读它每时刻的变化值。
- 学会查手册,每一块芯片再设计完成后,它在封装状态可以处理的通信方式是已经固定的。在对于简单的外设,可以直接调用库函数,可是当涉及到需要由寄存器操作的模块,有的如uart,本身就有库函数,有的就像这次的加速度计一样,要研究芯片的寄存器的作用。再根据通信方式读取寄存器内的信息达成任务。
