@floatsd
2016-06-09T15:32:57.000000Z
字数 3479
阅读 2652
实验五 直流电机控制实验
note_DSP
1 实验目的
- 学习用C 语言编制中断程序,控制F2812 DSP 通用I/O 管脚产生不同占空比的PWM信号;
- 学习F2812DSP 的通用I/O 管脚的控制方法;
- 学习直流电机的控制原理和控制方法。
2 实验原理
2.1 直流电机控制
- TMS 对直流无刷电动机的转速控制方法可分为两类:对励磁磁通进行控制的励磁控制方法和对电枢电压进行控制的电枢电压控制法。实验中采用脉冲调宽(PWM)方式来控制电动机电枢电压实现调速。
- 电枢电压控制法是在保持励磁磁通不变的情况下,通过调整电枢电压来实现调速。同时在对电动机电枢电压的控制和驱动中,对半导体功率器件的使用上又可分为两种方式:线性放大方式和开关驱动方式。
- 利用开关管对直流电动机进行PWM调压调速的方法为:PWM输入开关管控制其通断,开关管导通电机两端有电压,关断两端电压为零,则电枢电压两端电压平均值,式中为占空比。实验中输入电压固定不变,通过调节占空比可实现调速。
- 对PWM来说,为一周期T内信号1的时间,为一周期T内信号0的时间,那么调节占空比的方法也对应有三种,分别是:
- 定宽调频:保持不变,只改变,T随之改变;
- 调宽调频:保持不变,只改变,T随之改变;
- 定频调宽:T保持不变,同时改变和。
- 实验中使用的是定频调宽法。
2.2 输入信号
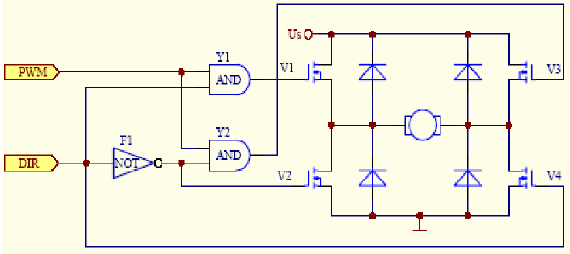
- 图中PWM输入对应ICETEK-F2812-A 评估板上P4 外扩插座第26 引脚的PWM11信号,DSP 将此引脚上给出PWM信号用来控制直流电机的转速;图中DIR 输入对应ICETEK-F2812-A评估板上P1外扩插座第6引脚的PWM5信号,DSP 将在此引脚上给出高电平或低电平来控制直流电机的方向。从DSP 输出的PWM信号和转向信号先经过2个与门和1个非门再与各个开关管的栅极相连;
- 当电动机要求正转时,PWM11给出高电平信号;
- 当电动机要求反转时,PWM5给出低电平信号。
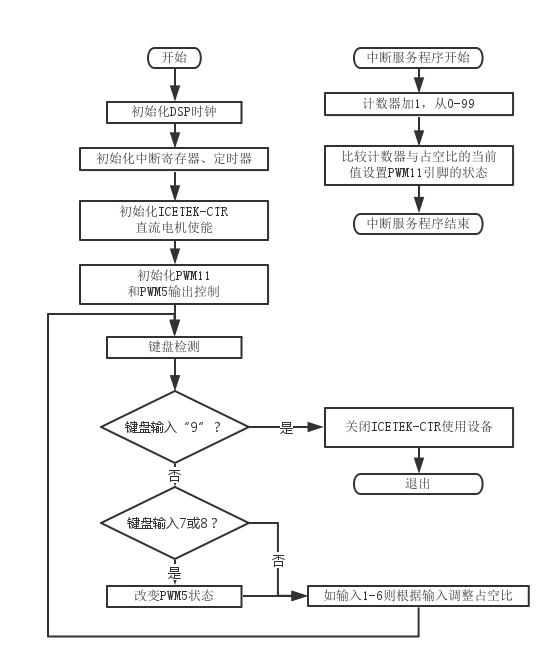
2.3 程序编制
- 程序中采用定时器中断产生固定频率的PWM波,在每个中断中根据当前占空比判断应输出波形的高低电平。主程序用轮询方式读入键盘输入,得到转速和方向控制命令。在改变电机方向时为减少电压和电流的波动采用先减速再反转的控制顺序。
- 程序流程图如下:
3实验内容
3.1 实验及观察结果
- 连接实验设备,开启电源,启动CCS,打开工程文件dcmotor.pjt;
- 运行程序,电机中等速度转动如下图,按键盘上数字1-6分别对应从高到低六个转速,其中1对应占空比30,转速过低转不起来。键盘上7和8分别对应着顺时针转和逆时针反转。
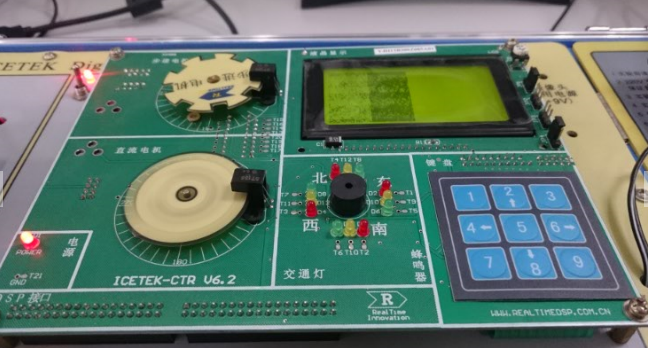
- 键盘上9对应着电机停止转动并退出程序。
3.2 修改程序
- 修改程序实现:按键盘上7加速,按8减速(注意源程序中的案件防抖设置,会禁止两次相同的按键,需删去
if(cKey!=0&&cOldKey!=cKey)语句中的&&cOldKey!=cKey,这样才能实现连续加速和连续减速。
while (1){nScanCode=*(int *)0x108001; // 读扫描码nScanCode&=0x0ff; // 取扫描值的低8位uPort8000=*(int *)0x108002;if ( nScanCode!=0 ){if ( nScanCode==9 ) break;//按下9键退出程序else{cKey=nScanCode;//cKey赋值为扫描值并依照键盘选择进行调速if ( cKey!=0 ){cOldKey=cKey;switch ( cKey ){case 1: uN=10; break;case 2: uN=50; break;case 3: uN=60; break;case 4: uN=70; break;case 5: uN=80; break;case 6: uN=100; break;case7:uN=uN+5; //按下7占空比加5break;case8:uN=uN+5; //按下8占空比减5break;}}}}}
4 实验结论
4.1 实验结论
- 实验利用定时器中断扫描得到当前占空比,并通过轮循扫描键盘实现用户控制占空比,通过控制PWM占空比控制电枢电压,达到直流电机调速的目的。
- 实验中遇到的问题:
while (1){nScanCode=*(int *)0x108001;nScanCode&=0x0ff;if ( nScanCode!=0 ) //如果要限定扫描值为1-9,为什么要只判断是否非零{if ( nScanCode==9 ) break;else{cKey=nScanCode;//前面已经判断过nScanCode了,cKey是直接由nScanCode赋值,为什么还要判断一次同样的内容。if ( cKey!=0 ){cOldKey=cKey;switch ( cKey )...}}}}
5 思考题
思考题1:结合液晶显示控制实验,修改源程序,将所设定的占空比实时在液晶屏幕上显示。
- 流程图
- 在更新完逻辑值后增加LCD显示,流程图如下:
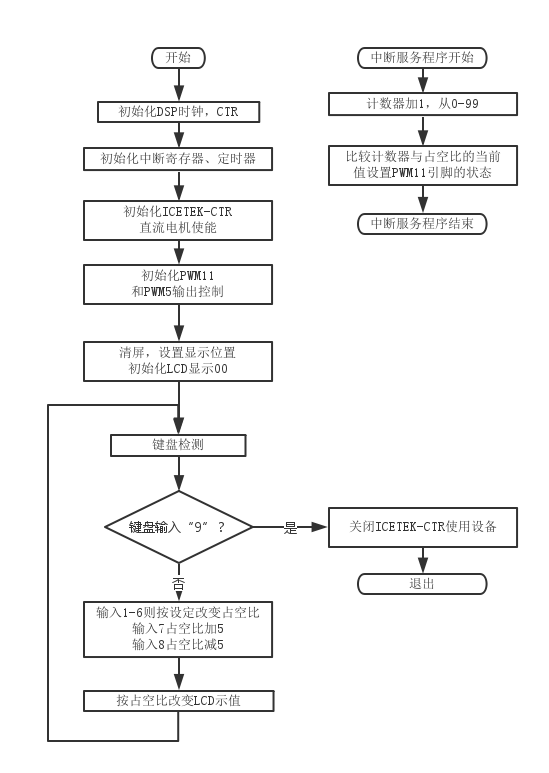
- 在更新完逻辑值后增加LCD显示,流程图如下:
- 初始化设定
CTRGR=0x80; // 初始化ICETEK-CTRCTRGR=0x0;CTRGR=0x80;CTRLR=0; // 关闭东西方向的交通灯CTRLR=0x40; // 关闭南北方向的交通灯uPort8000=CTRCLKEY;TurnOnLCD(); // 打开显示LCDCLS(); // 清除显示内存CTRLCDCMDR=LCDCMDSTARTLINE; // 设置显示起始行Delay(LCDDELAY);CTRLCDCR=0;Delay(LCDDELAY);f_init(0,0); //初始化LCD为00CTRLR=0xC0;CTRGR=0x81;Gpio_PortA();Gpio_PortB();nSpeed=T46uS;uN=60; nCount=nCount1=0; nDir=0; cKey=cOldKey=0;StartCpuTimer0(); //启动定时器
- 软件延时扫描改变占空比并显示
while (1){nScanCode=*(int *)0x108001; // 读扫描码nScanCode&=0x0ff; // 低8位uPort8000=*(int *)0x108002;//Delay(5);if ( nScanCode!=0 ){if ( nScanCode==9 ) break;else{cKey=nScanCode;if ( cKey!=0 /*&& cOldKey!=cKey*/ ){cOldKey=cKey;switch ( cKey ){case 1: uN=10; break;case 2: uN=50; break;case 3: uN=60; break;case 4: uN=70; break;case 5: uN=80; break;case 6: uN=100; break;case 7:uN=uN+5;nScanCode=0;break;case 8:uN=uN-5;nScanCode=0;break;}CTRGR=0x80; // 初始化ICETEK-CTRCTRGR=0x0;CTRGR=0x80;CTRLR=0; // 关闭东西方向的交通灯CTRLR=0x40;b=uN%10;a=(uN-b)/10; //得到占空比个位数和十位数f_init(a,b); //输入待显示十位数个位数CTRLR=0xC0;CTRGR=0x81;}}}CTRLR=0xC0;CTRGR=0x81;//Delay(4);}StopCpuTimer0();CTRGR=0;}
- 运行程序结果如下:

思考题2:电动机是一个电磁干扰源。电动机的启停还会影响电网电压的波动,它周围的电器开关也会引发火花干扰。因此,除了采用必要的隔离、屏蔽盒电路板合理布线等措施外,看门狗的功能就会显得格外重要。看门狗在工作时不断地监视程序运行的情况,一旦程序“跑飞”,会立刻使DSP复位。
- 看门狗是用作避免系统工作异常的定时电路,它监视系统软件和硬件的运行,并可以按照用户设定的时间间隔产生中断或复位系统。
- 当软件进入非正常循环或运行到非法的程序空间,导致系统无法正常工作,看门狗的8位定时器计数器进行加计数,当计数器上溢,即产生中断()或复位()信号,进入中断程序或复位系统。
- 则在用户程序正常运行时,要屏蔽看门狗模块或软件周期性向看门狗复位寄存器WDKEY写入序列0x55+0xAA为看门狗计数器清零。
