@Team
2019-01-27T08:25:07.000000Z
字数 5638
阅读 2380
《Computer vision》笔记-MobileNet(7)
石文华
1、前言
移动端和其他嵌入式系统通常是内存空间小,能耗要求低的,也就是计算资源有限。一般的模型,比如ImageNet数据集上训练的VGG,googlenet,resnet等,需要巨大的计算资源,所以很难用在嵌入式系统上。MobileNet是一种高效的模型,用于移动和嵌入式视觉应用。
2、深度可分离卷积(depthwise separable convolution)
MobileNet使用技术之一是深度可分离卷积(depthwise separable convolution)代替传统的3D卷积操作,这样可以减少参数数量以及卷积过程中的计算量,但是也会导致特征丢失,使得精度下降。MobileNet其实就是Xception思想的应用。区别就是Xception文章重点在提高精度,而MobileNet重点在压缩模型。
假设输入特征图有M个,大小为DF,输出的特征图是N个,卷积核尺寸是Dk*Dk,那么传统的3D卷积的卷积核是立体的,也就是每一个卷积核都是Dk*Dk*M,总共有N个Dk*Dk*M的卷积核,如下图所示:
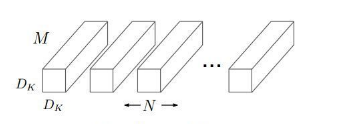
所以总的参数个数为Dk*Dk*M*N,假设输出使用的padding参数是same,则输出特征图大小也是DF,那么总的计算量为Dk*Dk*M*N*DF*DF。
而MobileNet将普通卷积操作分为两部分,第一部分是逐通道卷积,使用M个通道数为1,大小为Dk*Dk的卷积核,每一个卷积核负责其中的一个通道。如下图所示:
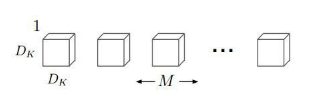
逐通道卷积之后的参数个数为:Dk*Dk*M,同样假设padding为same,则计算量为:Dk*Dk*M*DF*DF
第二部分是点卷积,也就是采用3D的1*1卷积改变通道数,对深度方向上的特征信息进行组合,最终将输出通道数变为指定的数。如下图所示:
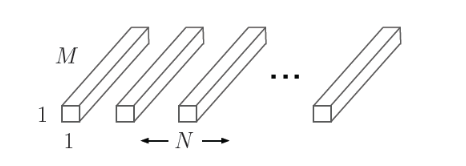
这部分的参数个数为:M*N,padding为same时的计算量为M*N*DF*DF.
因此这种分离之后的总的计算量为::Dk*Dk*M*DF*DF+M*N*DF*DF。
深度可分离卷积跟传统3D卷积计算量的比例为:

如下图,左边是3D卷积常见结构,右边是深度可分离卷积的使用方式:

3、宽度因子和分辨率因子
MobileNet有两个简单的全局超参数,分别是宽度因子和分辨率因子,可有效的在延迟和准确率之间做折中。允许我们依据约束条件选择合适大小、低延迟、易满足嵌入式设备要求的模型。
(1)宽度因子
上述的逐通道卷积的卷积核个数通常是M,也就是Dk*Dk*1的卷积核个数等于输入通道数,宽度因子是一个参数为(0,1]之间的参数,作用于通道数,可以理解为按照比例缩减输入通道数。同理,输出的通道数也可以通过这个参数进行按比例缩减。用α表示这个参数,则计算量为:

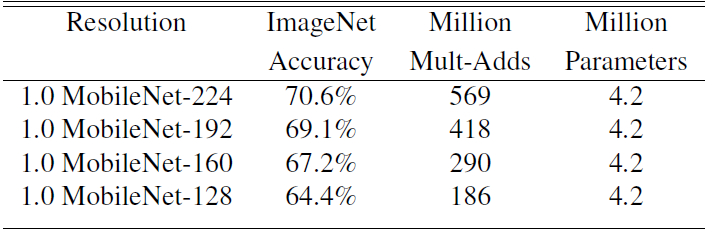
不同的α取值在ImageNet上的准确率,下图为准确率,参数数量和计算量之间的权衡情况:

(2)分辨率因子
上述的输入特征图大小为DF*DF,分辨率因子取值范围在(0,1]之间,可以理解为对特征图进行下采样,也就是按比例降低特征图的大小,使得输入数据以及由此在每一个模块产生的特征图都变小,用β表示这个参数,结合宽度因子α,则计算量为:

不同的β系数作用于标准MobileNet时,对精度和计算量以的影响(α固定):
4、改进(MobileNet V2):
在 MobileNet-V1 基础上结合当下流行的残差思想而设计,V2 主要引入了两个改动:Linear Bottleneck 和 Inverted Residual Blocks。
V1与V2的结构对比:

两者相同的地方在于都采用 Depth-wise (DW) 卷积搭配 Point-wise (PW) 卷积的方式来提特征。
(1)改进一:
V2在 DW 卷积之前新加了一个 PW 卷积,主要目的是为了提升维度数。相比V1直接在每个通道上单独提取特征,V2的这种做法能够先组合不同深度上的特征,并升维,使得特征更加丰富。比直接DW的话,特征提取的效果更好。
(2)改进二:
V2 去掉了第二个 PW 的激活函数。论文作者称其为 Linear Bottleneck。这么做的原因,是因为作者认为激活函数在高维空间能够有效的增加非线性,而在低维空间时则会破坏特征,由Relu的性质,Relu对于负的输入,输出全为零,所以relu会使得一部分特征失效。由于第二个 PW 的主要功能就是降维,再经过Relu的话,又要“损失”一部分特征,因此按照上面的理论,降维之后就不宜再使用 Relu了。如下图所示,一个原始螺旋形被利用随机矩阵T经过ReLU后嵌入到一个n维空间中,然后使用T−1投影到2维空间中。例子中,n=2,3导致信息损失,可以看到流形的中心点之间互相坍塌。同时n=15,30时信息变成高度非凸。

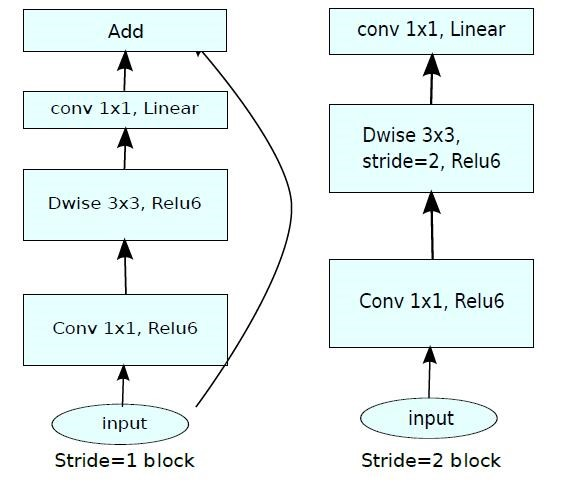
(3)使用短路连接: 倒残差(Inverted Residual)
典的残差块是:1x1(压缩)->3x3(卷积)->1x1(升维),而inverted residual顾名思义是颠倒的残差:1x1(升维)->3x3(dw conv+relu)->1x1(降维+线性变换),skip-connection(跳过连接)是在低维的瓶颈层间发生的(如下图),这对于移动端有限的宽带是有益的。连接情况如下图所示(shortcut只在stride==1时才使用):
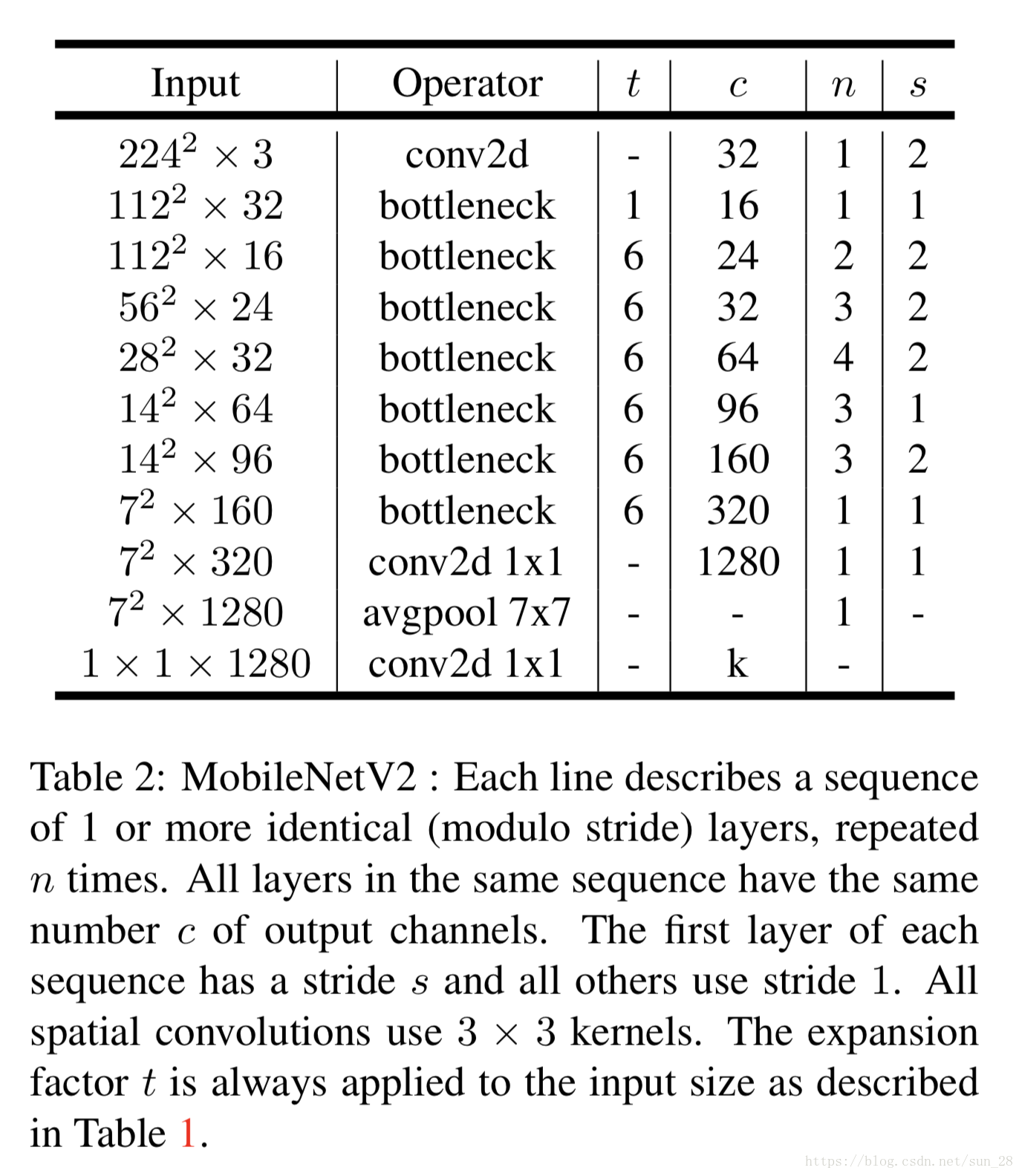
(4)网络结构如下:
由于笔者水平有限,可参考如下github上的代码:https://github.com/tonylins/pytorch-mobilenet-v2/blob/master/MobileNetV2.py
import torch.nn as nnimport math#传统的3D卷积def conv_bn(inp, oup, stride):return nn.Sequential(nn.Conv2d(inp, oup, 3, stride, 1, bias=False),#卷积nn.BatchNorm2d(oup), #bnnn.ReLU6(inplace=True)#relu6)#1x1的点卷积def conv_1x1_bn(inp, oup):return nn.Sequential(nn.Conv2d(inp, oup, 1, 1, 0, bias=False),nn.BatchNorm2d(oup),nn.ReLU6(inplace=True))#倒残差class InvertedResidual(nn.Module):def __init__(self, inp, oup, stride, expand_ratio):#参数分别是输入特征图数,输出特征图数,步长,扩展比例super(InvertedResidual, self).__init__()self.stride = stride #步长assert stride in [1, 2]hidden_dim = round(inp * expand_ratio)#隐藏层层数,expand_ratio为拓展倍数self.use_res_connect = (self.stride == 1 and inp == oup)#是否进跳跃链接if expand_ratio == 1: #不进行扩展self.conv = nn.Sequential(# dwnn.Conv2d(hidden_dim, hidden_dim, 3, stride, 1, groups=hidden_dim, bias=False),#可分离卷积nn.BatchNorm2d(hidden_dim),nn.ReLU6(inplace=True),# pw-linearnn.Conv2d(hidden_dim, oup, 1, 1, 0, bias=False),nn.BatchNorm2d(oup),)else:self.conv = nn.Sequential(# pwnn.Conv2d(inp, hidden_dim, 1, 1, 0, bias=False),nn.BatchNorm2d(hidden_dim),nn.ReLU6(inplace=True),# dwnn.Conv2d(hidden_dim, hidden_dim, 3, stride, 1, groups=hidden_dim, bias=False),nn.BatchNorm2d(hidden_dim),nn.ReLU6(inplace=True),# pw-linearnn.Conv2d(hidden_dim, oup, 1, 1, 0, bias=False),nn.BatchNorm2d(oup),)def forward(self, x):if self.use_res_connect:return x + self.conv(x)else:return self.conv(x)class MobileNetV2(nn.Module):def __init__(self, n_class=1000, input_size=224, width_mult=1.):super(MobileNetV2, self).__init__()block = InvertedResidual#创建一个倒残差对象input_channel = 32last_channel = 1280'''t :是输入通道的倍增系数(即中间部分的通道数是输入通道数的多少倍)n :是该模块重复次数c :是输出通道数s :是该模块第一次重复时的 stride(后面重复都是 stride 1)'''interverted_residual_setting = [# t, c, n, s[1, 16, 1, 1],[6, 24, 2, 2],[6, 32, 3, 2],[6, 64, 4, 2],[6, 96, 3, 1],[6, 160, 3, 2],[6, 320, 1, 1],]# building first layerassert input_size % 32 == 0input_channel = int(input_channel * width_mult)self.last_channel = int(last_channel * width_mult) if width_mult > 1.0 else last_channelself.features = [conv_bn(3, input_channel, 2)]# building inverted residual blocksfor t, c, n, s in interverted_residual_setting:output_channel = int(c * width_mult)for i in range(n):if i == 0:self.features.append(block(input_channel, output_channel, s, expand_ratio=t))else:self.features.append(block(input_channel, output_channel, 1, expand_ratio=t))input_channel = output_channel# building last several layersself.features.append(conv_1x1_bn(input_channel, self.last_channel))# make it nn.Sequentialself.features = nn.Sequential(*self.features)# building classifierself.classifier = nn.Sequential(nn.Dropout(0.2),nn.Linear(self.last_channel, n_class),)self._initialize_weights()def forward(self, x):x = self.features(x)x = x.mean(3).mean(2)x = self.classifier(x)return xdef _initialize_weights(self):for m in self.modules():if isinstance(m, nn.Conv2d):n = m.kernel_size[0] * m.kernel_size[1] * m.out_channelsm.weight.data.normal_(0, math.sqrt(2. / n))if m.bias is not None:m.bias.data.zero_()elif isinstance(m, nn.BatchNorm2d):m.weight.data.fill_(1)m.bias.data.zero_()elif isinstance(m, nn.Linear):n = m.weight.size(1)m.weight.data.normal_(0, 0.01)m.bias.data.zero_()model= MobileNetV2()print(model)
参考文献:
https://blog.csdn.net/t800ghb/article/details/78879612
https://www.cnblogs.com/CodingML-1122/p/9043078.html
https://blog.csdn.net/u011995719/article/details/79135818
https://zhuanlan.zhihu.com/p/33075914
https://zhuanlan.zhihu.com/p/39386719
https://mp.weixin.qq.com/s/T6S1_cFXPEuhRAkJo2m8Ig
https://blog.csdn.net/qq_31531635/article/details/80550412
https://github.com/tonylins/pytorch-mobilenet-v2/blob/master/MobileNetV2.py
