@huanghaian
2020-11-02T07:49:47.000000Z
字数 6724
阅读 3906
mmdetection最小复刻版(十七):ssd算法详解
mmdetection
0 摘要
除了YOLO系列,Single Shot MultiBox Detector(SSD)也算是one-stage目标检测算法的先行者了,相比于YOLOV1和FasterRCNN,其主要特点是:
(1) 在one-stage算法中引入了多尺度预测(主要是为了克服CNN不具有尺度不变性问题)
(2) 参考FasterRCNN中anchor的概念,将其引入one-stage中,通过在每个特征图位置设置不同个数、不同大小和不同比例的anchor box来实现快速收敛和优异性能
(3) 采用了大量有效的数据增强操作
(4) 从当时角度来看,速度和性能都超越当时流行的YOLOV1和FasterRCNN
即使到目前为止,多尺度预测加上anchor辅助思想依然是主流做法。
1 算法分析
当时主流算法输出形式如下:
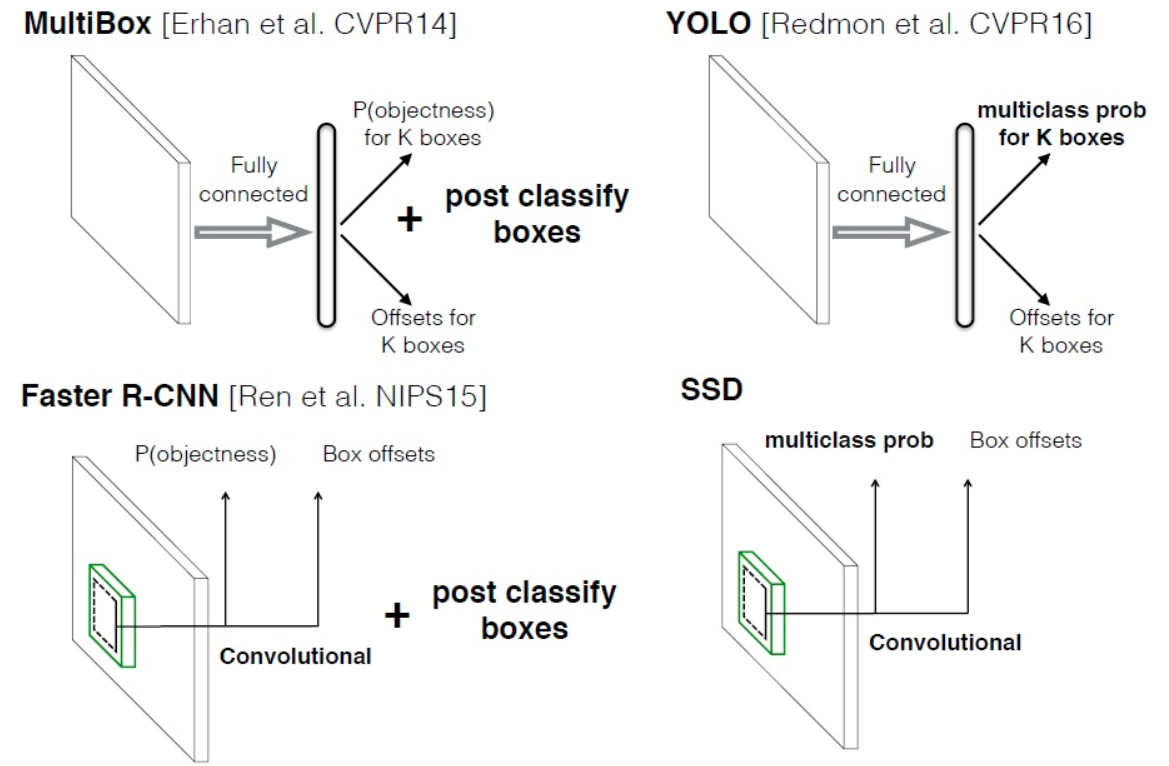
而SSD的多尺度预测简要流程如下;
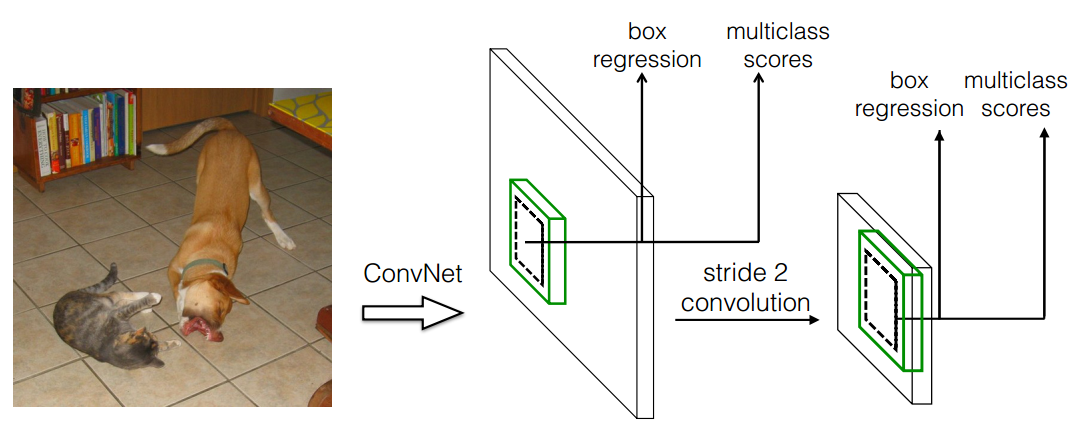
相比于YOLOV1,其差别如下:
主要差别在于 (1)多尺度预测; (2)引入了anchor;(3) 全卷积形式,接下来按照目标检测通用算法流程思路来讲解。ssd也是包括backbone、head、正负样本定义、bbox编解码和loss设计5个部分。
1.1 backbone设计
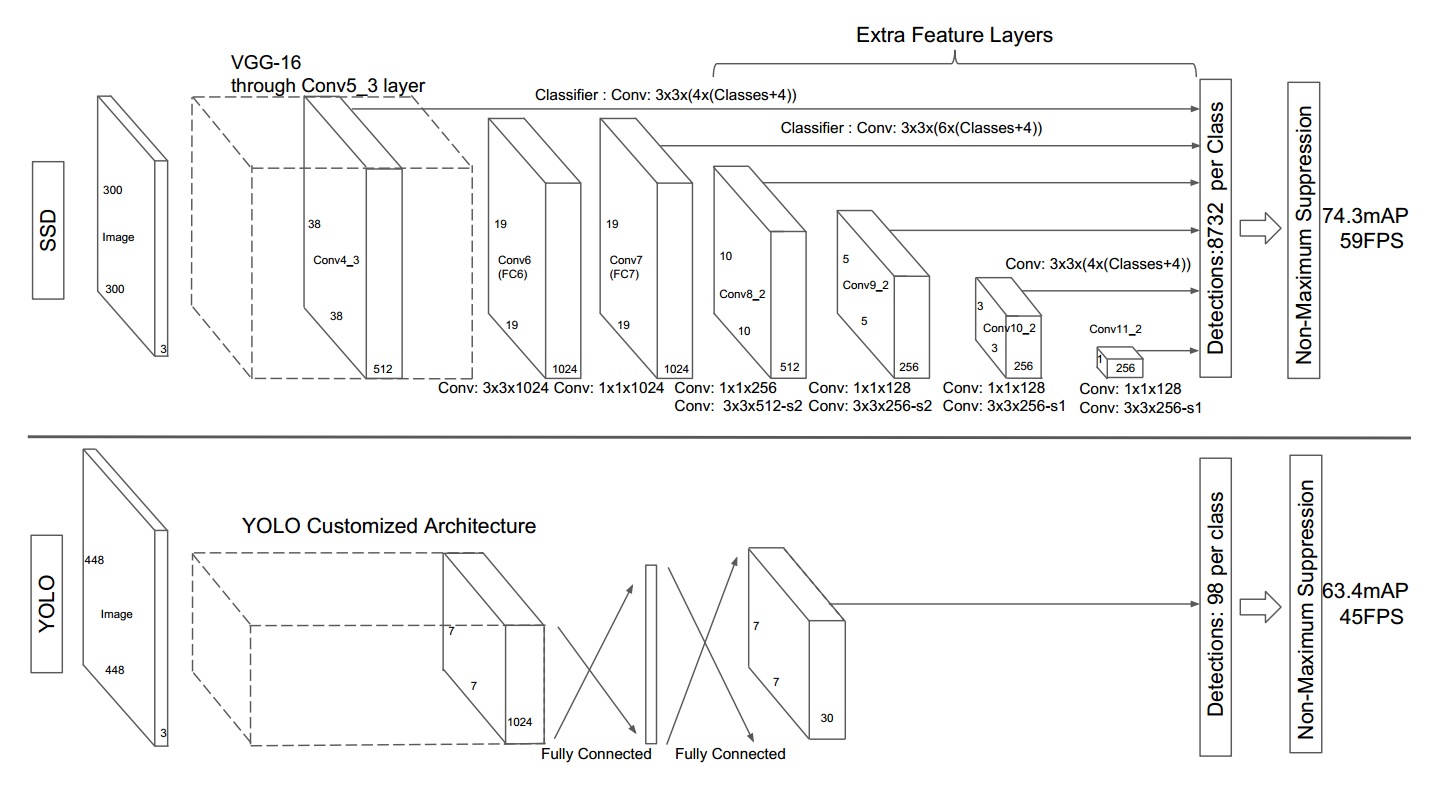
SSD的骨架是VGG16,其是当前主流的分类网络,其主要特点是全部采用3x3的卷积核,然后通过多个卷积层和最大池化层堆叠而成,是典型的直筒结构。VGG16是在ILSVRC CLS-LOC数据集上预训练过,为了更加适合目标检测,作者进行了适当扩展:
(1) 借鉴DeepLab-LargeFOV思想,将VGG16的全连接层fc6和fc7转换成3x3卷积层conv6和1x1的conv7,同时将池化层pool5由原来的stride=2的2x2变成stride=1的3x3,为了配合这种变化,对conv6(3x3卷积且空洞率为6)采用了空洞卷积,其在不增加参数与模型复杂度的条件下指数级扩大卷积的视野,其使用扩张率(dilation rate)参数来表示扩张的大小。
(2) 然后移除原始vgg的dropout层和fc8层,并新增一系列卷积层,在检测数据集上做微调。SSD算法包括两个模型分别是SSD300和SSD512,后面数字表示输入图片size,这两个模型都是新增一系列卷积层,但是SSD512模型新增的卷积会多一些,其余都是完全相同。
(3) 新增的一系列卷积层中除了卷积层外不含有其他部件,如果需要下采样是通过3x3且stride=2的卷积实现,具体配置如下:
extra_setting = {
300: (256, 'S', 512, 128, 'S', 256, 128, 256, 128, 256),
512: (256, 'S', 512, 128, 'S', 256, 128, 'S', 256, 128, 'S', 256, 128),
}
S表示需要进行下采样。具体细节请看上图的详细结构图,里面有绘制卷积参数。VGG16在当时是主流网络,但是由于其参数量巨大且网络比较浅,特征提取和感受野比较有限,现在主流骨架网络基本都是resnet及其改进版本。
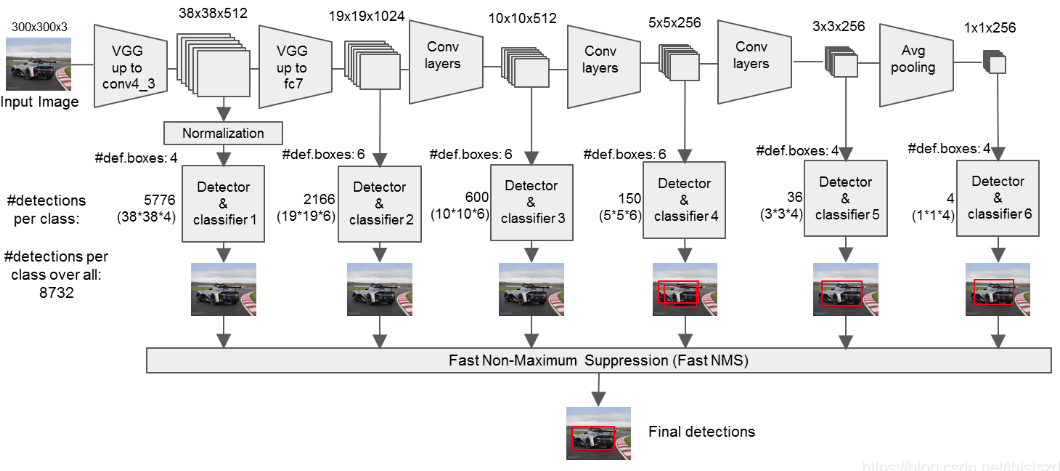
假设是SSD300,那么一共包括6个输出特征图,分别命名为conv4_3、conv7、conv8_2、conv9_2、conv10_2和conv11_2,其wh大小分别是38x38、19x19、10x10、5x5、3x3和1x1,而SSD512包括7个输出特征图,命名论文中没有给出,其wh大小分别是64x64、32x32、16x16、8x8、4x4、2x2、1x1。
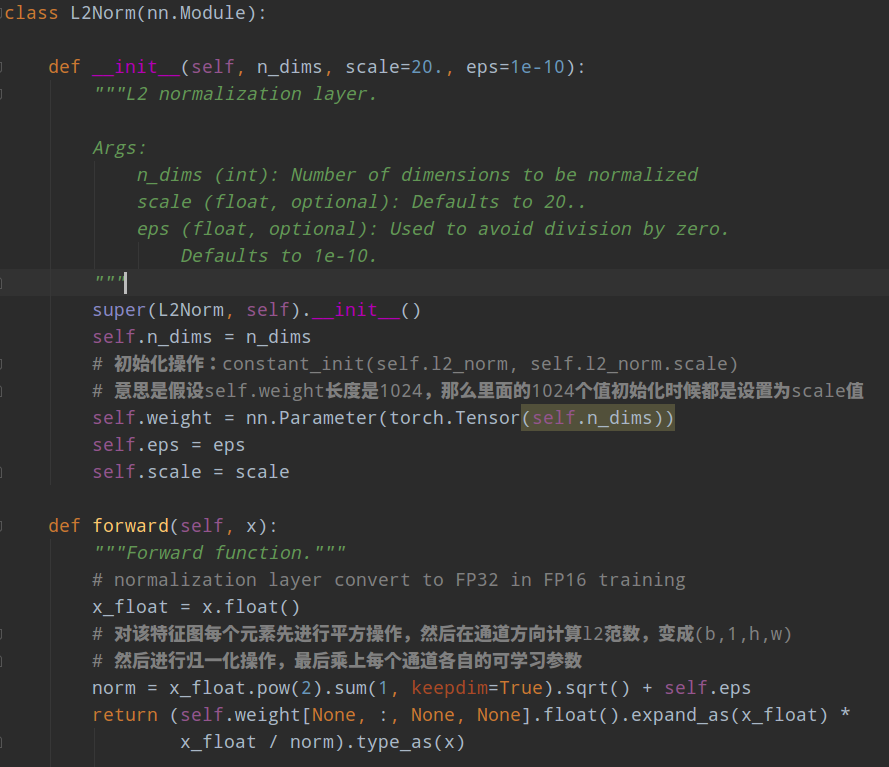
需要注意的是:作者实验发现,conv4_3层特征图比较靠前,其L2范数值(平方然后开根号)相比其余输出特征图层比较大,也就是数值不平衡,为了更好收敛,作者对conv4_3+relu后的输出特征图进行l2 norm到设置的初始20范围内操作,并且将20这个数作为初始值,然后设置为可学习参数。
1.2 head设计
backbone模块会输出n个不同尺度的特征图,head模块对每个特征图进行处理,输出两条分支:分类和回归分支。假设某一层的anchor个数是m,那么其分类分支输出shape=(b,(num_cls+1)×m,h',w'),回归分支输出shape=(b,4*m,h',w')。
1.3 正负样本定义
在说明正负样本定义前,由于SSD也是基于anchor变换回归的,而且其有一套自己根据经验设定的anchor生成规则,故需要先说明anchor生成过程。anchor的可视化如下:

就是对输出特征图上面任何一点,都铺设指定数目,但是不同大小、比例的先验框anchor。
对于任何一个尺度的预测分支,理论上anchor设置的越多,召回率越高,但是速度越慢。为了速度和精度的平衡,作者在不同层设置了不同大小、不同个数、不同比例的anchor,下面进行详细分析。
以SSD300为例,其提出了一个公式进行设计:

公式的含义是:输出特征图从大到小,其anchor尺寸设定遵循线性递增规则:随着特征图大小降低,先验框尺度线性增加,从而实现大特征图检测小物体,小特征图检测大物体效果。这里的m是值特征图个数,例如ssd300为6,ssd512为7。第一层conv4_3是单独设置,不采用上述公式,表示先验框大小相对于图片的base比例,而表示比例的最小和最大值,voc数据集默认是0.2和0.9,coco数据集默认是0.15和0.9。
需要注意的是:作者提供的caffe版本代码和上面的公式比较难对应,而且mmdet里面实现也没有完全按照上面公式来写代码,故为了简单的描述该过程,本文采用mmdet代码流程来分析。虽然实现有一点点不一样,但是最终的anchor设置是完全相同的。以voc数据集和ssd300为例进行详细描述(coco数据也是一样,仅仅是第一个输出层设置不一样而已)
(1) 先算出每个输出特征图上anchor的最大和最小尺度
第一个输出层单独设置,其min_size=300x10/100=30,max_size=300x20/100=60。
从第二个输出层开始,首先将乘上100并且取整,得到min_ratio和max_ratio,然后计算出step步长为:
int(np.floor(max_ratio - min_ratio) / (num_levels=6 - 2))
最后利用step计算得到每个输出层的min_size和max_size
# 计算第2个输出图和第self.num_levels个特征图anchor的min_size和max_size
for ratio in range(int(min_ratio), int(max_ratio) + 1, step):
min_sizes.append(int(300 * ratio / 100))
max_sizes.append(int(300 * (ratio + step) / 100))
# 第1个输出图单独算min_size和max_size
if self.input_size == 300:
# conv4_3层的anchor单独设置,不采用公式
if basesize_ratio_range[0] == 0.15: # SSD300 COCO
min_sizes.insert(0, int(300 * 7 / 100))
max_sizes.insert(0, int(300 * 15 / 100))
elif basesize_ratio_range[0] == 0.2: # SSD300 VOC
min_sizes.insert(0, int(300 * 10 / 100))
max_sizes.insert(0, int(300 * 20 / 100))
这样就可以得到6个输出图所需要的min_size和min_size数值,注意这是原图尺度。
(2) 计算(0,0)特征图坐标处的anchor尺度和高宽比
首先配置参数为ratios=[2, [2, 3], [2, 3], [2, 3], 2, 2]),如果某一层的比例是2,那么表示实际高宽比例是[1,1/2,2],如果是3,则表示[1,1/3,3],可以看出如果某一层ratio设置为[2,3],那么实际上比例有[1,2,3,1/2,1/3]共5种比例,而尺度固定为[1., np.sqrt(max_sizes[k] / min_sizes[k])],k为对应的输出层索引。
带目前为止,6个特征图对应的anchor个数为[2x3=6,2x5=10,10,10,6,6],表示各种比例和尺度的乘积。
(3) 利用base值、anchor尺度和高宽比计算得到每层特征图上(0,0)位置的实际anchor值
这个计算就和常规的faster rcnn完全相同了,计算(0,0)点处的实际宽高,然后利用中心偏移值得到所有anchor的xyxy坐标。
但是SSD里面不同输出层anchor个数不一样,故在得到所有anchor的xyxy坐标后,还需要进行筛选:
indices = list(range(len(self.ratios[i])))
indices.insert(1, len(indices))
base_anchors = torch.index_select(base_anchors, 0,
torch.LongTensor(indices))
以conv4_3为例分析: conv4_3预测层是需要4个anchor,而上面其实生成了6个anchor,base size是min_sizes[k]),也就是其在没有乘上base size前的size排列是
1,
1/2,
2,
1 * np.sqrt(max_sizes[0] / min_sizes[0]),
1/2 * np.sqrt(max_sizes[0] / min_sizes[0]),
2 * np.sqrt(max_sizes[0] / min_sizes[0])
而我们实际上仅仅需要以下4个:
1,
1/2,
2,
1 * np.sqrt(max_sizes[0] / min_sizes[0]),
对于conv6其需要6个anchor,但是前面生成了10个,也就是说抛弃以下anchor size即可:
3,
1/3,
3 * np.sqrt(max_sizes[1] / min_sizes[1],
1/3 * np.sqrt(max_sizes[1] / min_sizes[1]),
对于其他输出层anchor的个数分析也是完全一样。最终6个特征图对应的anchor个数为[4,6,6,6,4,4]
(4) 对特征图所有位置计算anchor
直接将特征图上坐标点的每个位置都设置一份和(0,0)坐标除了中心坐标不同其余都相同的anchor即可,也就是将(0,0)特征图位置上面的anchor推广到所有位置坐标上。
基于前面的分析,SSD300一共有8732()个anchor。不得不说SSD的anchor设置策略太过复杂了,里面加入了很多不知道迷之参数,一旦换数据集那几乎很难改动,个人觉得设置规则这么复杂这么多先验是没有必要。
在得到整个SSD算法的所有anchor后,需要确定哪些anchor是正样本,其计算规则采用的是faster rcnn中采用的MaxIoUAssigner,但是由于阈值设置不一样,故解释也不一样:
assigner=dict(
type='MaxIoUAssigner',
pos_iou_thr=0.5,
neg_iou_thr=0.5,
min_pos_iou=0.,
ignore_iof_thr=-1,
gt_max_assign_all=False)
其规则如下:
- 对每个gt bbox进行遍历,然后和所有anchor(包括所有输出层)计算iou,找出最大iou对应的anchor,那么该anchor就负责该gt bbox即该anchor是正样本,该策略保证每个gt bbox一定有一个anchor进行匹配
- 对每个anchor进行遍历,然后和所有gt bbox计算iou,找出最大iou值对应的gt bbox,如果最大iou大于正样本阈值0.5,那么该anchor也负责对应的gt bbox,该anchor为正样本。该策略可以为每个gt bbox提供尽可能多的正样本
- 其余没有匹配上的anchor全部是负样本
论文中一个简单例子可以说明:
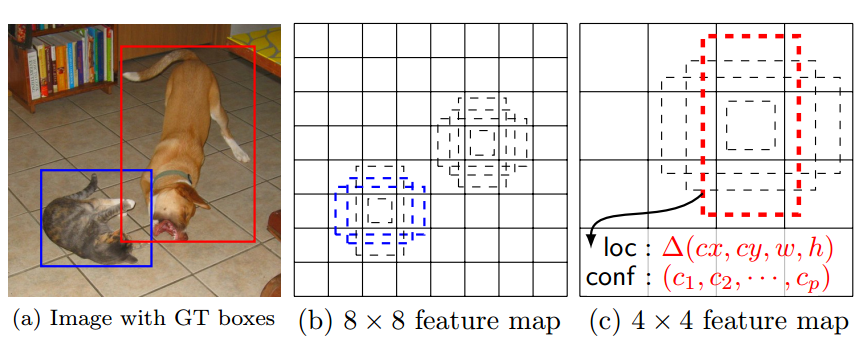
蓝色的猫会和(b)和(c)中的所有anchor进行匹配,基于iou准则,其仅仅会和(b)中的蓝色虚线框匹配上,而狗仅仅会和(c)的虚线红色框匹配上。
1.4 bbox编解码
对于任何一个正样本anchor位置,其gt bbox编码方式采用的依然是Faster rcnn里面的变换规则DeltaXYWHBBoxCoder即
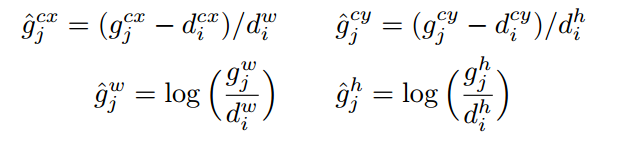
g表示gt bbox,d表示anchor,可以看出中心点xy预测是gt bbox中心点减掉anchor中心点,然后利用anchor的wh进行归一化,而wh预测是基于gt bbox的wh除以anchor的wh,最后利用log来压缩大小gt bbox范围差异。
解码过程就只需要反向操作即可,比较简单。
1.5 loss设计

对于分类分支来说,其采用的是ce loss,而回归分支采用的是smooth l1 loss,N是所有anchor中正样本anchor的数量,回归分支仅仅计算正样本位置预测值Loss。
前面说过经过匹配规则后存在大量负样本和少量正样本,对于分类分支来说这是一个极度不平衡的分类问题,如果不进行任何处理效果可能不太好,故作者采用了在线难负样本挖掘策略ohem,具体是对负样本进行抽样,按照置信度误差或者说负样本分类loss进行降序排列,选取误差较大的top-k作为训练的负样本,以保证正负样本比例接近1:3。
2 训练技巧
在SSD中提出应该采用大量有效的数据增强来提升目标检测性能。在SSD中其提出了:
(1) 水平翻转
(2) 随机裁剪、随机扩展和颜色扭曲
(3) 基于预设iou范围进行随机裁剪块
需要特意说明的是(3)规则,其预设min_ious=(0.1, 0.3, 0.5, 0.7, 0.9),min_crop_size=0.3范围。首先从min_ious列表里面随机选择某个iou取值,然后进行随机裁剪,只有当裁剪图片后的gt bbox和原图中的gt bbox的最小iou值不小于阈值才算成功,否则重新进行随机操作。以下是一个简单的例子:
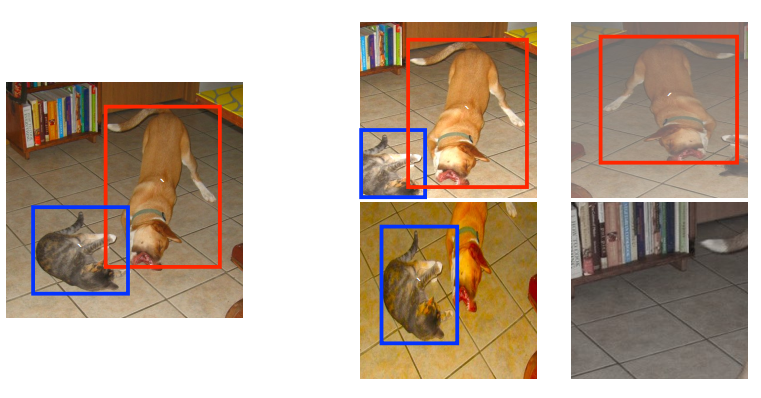
左边是原图,右边是随机裁剪加上颜色扭曲的结果图。
3 测试流程
以SSD300为例:
(1) 对输入图片进行前处理,变成指定大小输入到网络中,输出8732个基于anchor的预测值,其中任何一个都包括分类长度为num_class+1的向量,和回归长度为4的向量
(2) 首先对分类分支取出预测类别和对应的预测分值,过滤掉低于score_thr阈值的预测值
(3) 对剩下的anchor利用回归分支预测值进行bbox解码,得到实际预测bbox值
(4) 对所有bbox按照类别进行nms操作,得到最终预测bbox和类别信息
4 结果分析
4.1 多尺度预测重要性
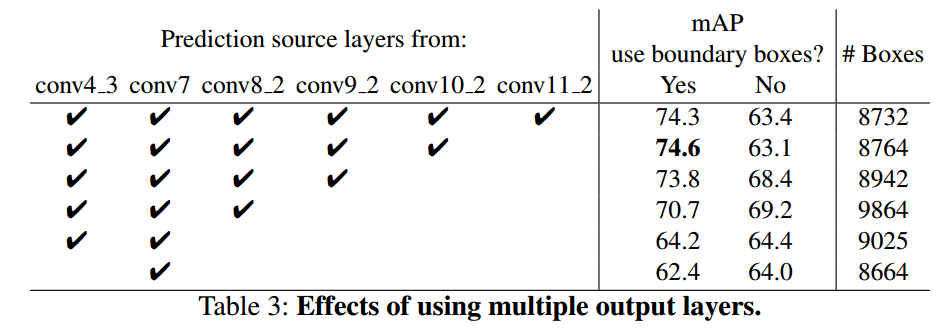
可以看出多尺度预测情况下可以提升性能。
4.2 anchor重要性
为了说明为啥要设置这么密集的anchor,作者做了大量实验,首先感受下SSD相比其余算法的anchor数目差异:

可以发现SSD远远多于其余算法。实验结果如下所示:
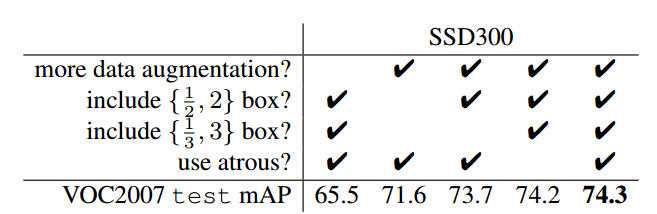
当包括更多anchor比例后,对应性能也有提升,并且SSD采用了OHEM策略可以在一定程度缓解由于anchor设置过密带来的正负样本不平衡问题。
4.3 数据增强重要性
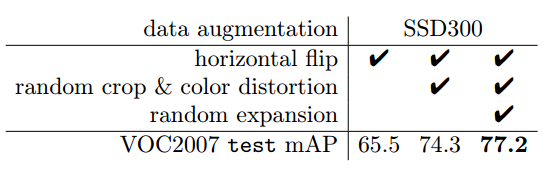
通过上表可以发现,高效的数据增强操作可以大幅提高目标检测性能。
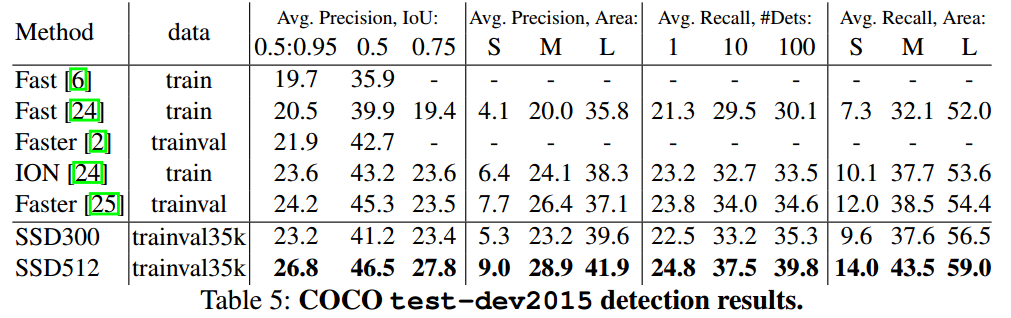
4.4 总体性能
精度对比:
速度对比:
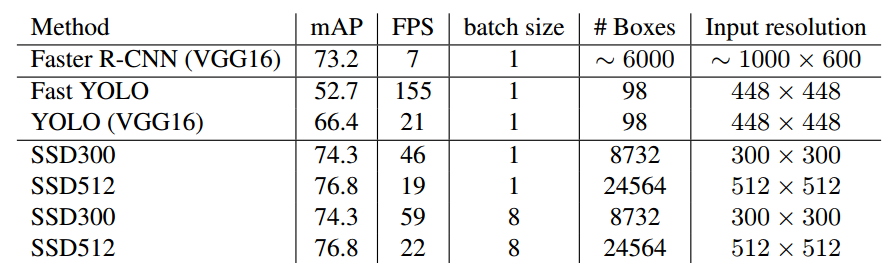
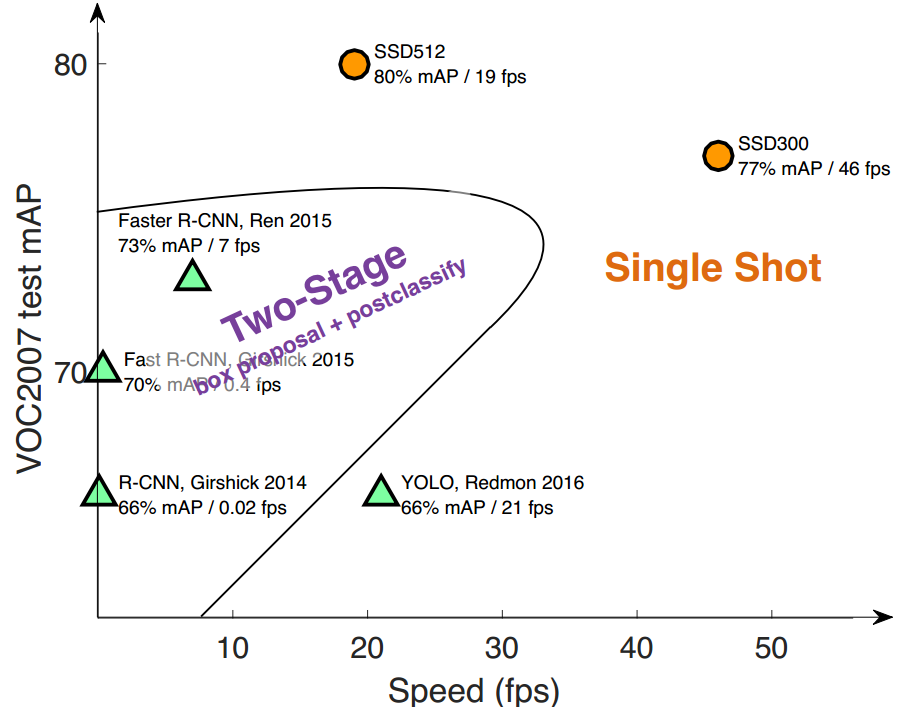
整体综合效果图如下:
5 总结
SSD基于Faster rcnn的思想,将其应用于One-stage目标检测中,实现了速度和精度的平衡。最大贡献是验证了多尺度预测、密集anchor设置附加ohem策略以及高效数据增强对整体算法的性能提升,其采用的核心操作依然是目前目标检测的主流做法。
