@joyphys
2015-08-17T01:37:42.000000Z
字数 12870
阅读 6879
第6讲:最小作用量原理
物理理论最低基础 Blog
莱尼感到沮丧头疼:“乔治,那么多东西哪记得住!力、质量、牛顿定律、动量、能量。你说过,搞物理不需要死记硬背。你能不能把这些浓缩成一个东西让我记住?”
“可以啊,莱尼。镇静。我可以把这一起都搞简单。你只需要记住一件事情:作用量总是平稳的。”

过渡到高等力学
最小作用量原理——准确讲是平稳作用量原理——是经典物理定律最简洁的理论形式。这条原理只有一句话,但能涵盖一切!这条原理不仅是经典力学遵循的原理,还是电磁学、广义相对论、量子力学,还有化学,乃至物质的最基本的结构单元基本粒子都遵循的原理。
让我们从经典力学的基本问题开始讨论,即从运动方程确定系统的轨迹(或轨道)。我们一般假设有三个已知条件:各质点的质量、所受各种力
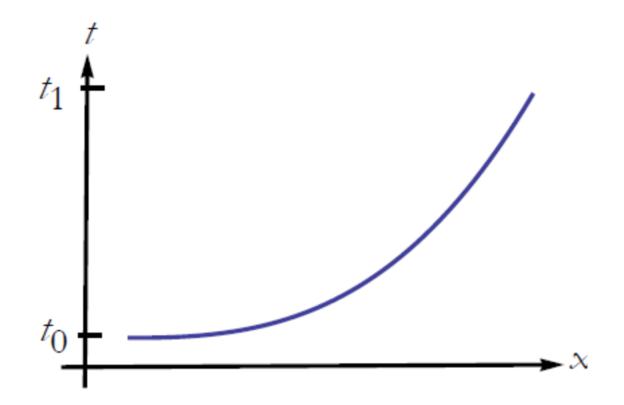
图1:从时刻
但是,我们也可以重新表述这个经典力学问题,同样给出
我们示意地画下时空图(见图2),以便说明问题。图中水平轴为质点(即棒球)的位置,竖直轴为时间。轨迹的初末端点已标注在时空图上,轨迹是连接这两点的曲线。
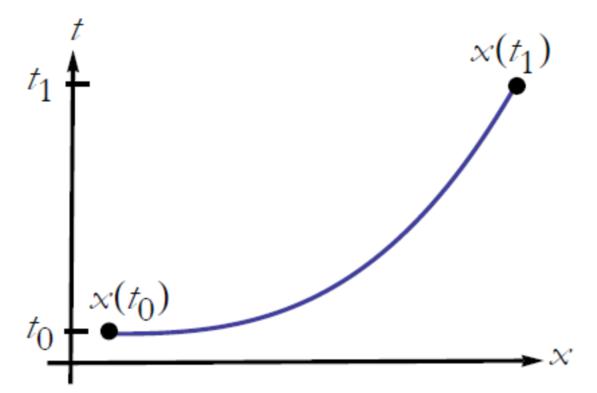
图2:棒球的轨迹
这个运动问题的两种表述方式类似在空间画一条直线的问题。一种画法是给定初始点和方向画直线,另一种画法是连接两个给定的点来画直线。前者类似给定初始位置和速度求运动轨迹,后者类似给定时空图上两位置求轨迹。给定两个点如何画直线?答案是沿两点之间最短路径画直线。对应于经典力学问题,轨迹为作用量为平稳值的路径。
作用量与拉格朗日量
作用量原理与牛顿方程需要的参数完全一样。你需要知道各质点的质量和体系的势能函数。路径的作用量是一个积分,两个积分限分别为初末时刻
在讨论一般情况之前,我们先讨论做直线运动的单个质点的情况。质点在
某轨迹的作用量为
你可能会觉得方程(
容易看出来,拉格朗日量是位置
作用量可写为拉格朗日量的积分:
平稳作用量原理非常神奇,使质点好像有超能力,能够从所有可能路径里找出使作用量为平稳值的路径。让我们暂停一下,思考我们正在做什么和将要得到什么。
对作用量求极值是对函数求极值的推广。作用量不是通常的多变量函数,它有无穷多变量,每个时刻的位置都是它的变量。发挥一下想象力,把连续轨迹代之以100万个点组成的“频闪”轨迹。每个点都有一个坐标
时间不是频闪的,真实的轨迹是连续的,由函数
尽管作用量泛函与普通函数差别很大,但是求作用量取平稳值的条件与求函数驻点的方法是很类似的。事实上,泛函取平稳值的条件与插播数学3的方程(4)的形式是一样的,即
变分可不是几个变量的微小变化,而是整个路径的微小变化。
本讲将会推导出作用量求极值所得方程,它们称为欧拉-拉格朗日方程。对于单个自由度的情况,轨迹上每一点都对应一个方程。这些方程是微分方程,给出系统如何随时间演化。因此,质点没有将所有可能路径都试一遍的超能力,至少不具有违背牛顿方程的能力。
这里我直接给出单自由度的欧拉-拉格朗日方程:
你可以将拉格朗日量代入,看是否能得到牛顿方程。
推导欧拉-拉格朗日方程
下面我们推导一下单自由度的欧拉-拉格朗日方程。首先把连续的时间换为频闪时间,可用
上面第一式就是用离散求和近似积分。第二式我们也熟悉,速度被代之以相邻位置之间的距离与时间间隔的商。
第二个代换有点微妙。由于我们要考虑对相邻时刻间的时间间隔求和,我们需要表示出两个时刻之间的中间时刻的位置。表示方法很简单,把
因此,拉格朗日量里的
至此,就把作用量明显地写成各项的和,编个计算机程序计算作用量就类似这样的形式。
现在,我们考虑作用量对
下一步要做的就是将上式对
其中,符号
我们现在讨论一下当
上式为一个函数在相邻时刻
第二项
此为
由
| 练习1:证明方程( |
|---|
以上推导同样可用于多自由度系统。对每个坐标
从以上推导可见,质点选择运动路径之前并没有感知所有路径的魔法。质点沿着轨迹的每一点,质点从当前时刻按使作用量最小的方式演化到下一时刻。最小作用量原理在每个瞬时表述为微分方程,该方程可确定体系下一时刻的行为。
更多质点,更高维度
对于一个多质点体系,假设需要
多自由度的最小作用量原理与单自由度情形的最小作用量原理本质上是一样的。拉格朗日量为动能减去势能:
作用量仍为拉格朗日量的积分:
最小(平稳)作用量原理仍然是体系的轨迹是使作用量为平稳值的轨迹。
变量很多的时候,我们改变轨迹的方式就更多了,比如我们可以改变
| 练习2:证明方程( |
|---|
最小作用量有什么好处??
最小作用量原理很有用,有两个主要原因。第一,最小作用量原理以很简明的方式涵盖了体系的所有运动信息。所有的参数(如质量和力)和所有运动方程都包含于一个函数——拉格朗日量。你知道拉格朗日量后,唯一剩下还需要知道的是初始条件。一个函数概况任意自由度体系的行为,这真是一个巨大的进步。在以后的几部书,我们将发现,物理整体的各个分支理论——麦克斯韦的电动力学、爱因斯坦的相对论和基本粒子的标准模型——都可以用拉格朗日量描述。
应用最小作用量原理的第二个原因是,力学的拉格朗日描述在实用性上有优势。后文会举例说明。
比如做一维运动一个质点,从一个静止的人看来,质点运动满足牛顿定律。这位静止的物理学家——比如是莱尼——用坐标
另外一位物理学家乔治正相对莱尼运动(平动,这里不考虑有转动的情况),他想知道如何描述质点相对自己的坐标。首先,相对乔治的坐标是什么意思?因为乔治在相对莱尼运动,所以乔治的坐标系的原点相对莱尼坐标系的原点在运动。这些可以通过莱尼坐标系的坐标
做法如下。在任意时刻
一个质点的运动轨迹,在莱尼看来是
在莱尼的坐标系,轨迹的作用量为:
我们也可以写出乔治坐标系里轨迹的作用量。我们需要把
带入方程(
把平方项展开,
乔治该怎么处理方程(
移项,
这个结果不奇怪。在乔治看来,质点还受到一个“虚拟”力
让我们再看一个例子。这次乔治坐着旋转木马。莱尼坐标系的坐标是
莱尼和乔治两位观察者都会看到,质点做平面运动。假设莱尼看来,质点不受力,则拉格朗日量为:
我们下一步要做的事情是,在乔治的旋转坐标系里把作用量表示出来,然后应用欧拉-拉格朗日方程,求出运动方程。我们已经知道莱尼坐标系里的作用量,我们只需用乔治坐标系的坐标把莱尼坐标系的速度表示出来。将方程(
应用
下一步要做的就是把方程(
我们来看看各项的含义。第一项,
容易看出,这个势能对应的力方向沿径向向外,大小正比于到圆周运动的圆心的距离:
这正是离心力。
方程(
形式上看正是牛顿方程,物体受力为离心力和科里奥利力。科里奥利力的分量为:
科里奥利力不仅是位置的函数还是速度的函数。
| 练习3:应用欧拉-拉格朗日方程,由拉格朗日量( |
|---|
这一练习的要点不在于推导离心力和科里奥利力,而是在于如何将力学问题在不同坐标系间变换,只需要在各坐标系写出相应的拉格朗日量就知道了。这是目前为止做这个变换的最简便的方法,要比直接变换牛顿方程容易得多。
再有一例,留给读者完成,将乔治坐标系里的方程变换到极坐标系:
| 练习4:将乔治坐标系里的拉格朗日量和欧拉-拉格朗日方程变换到极坐标系。 |
|---|
广义坐标和广义动量
笛卡尔坐标系没有什么特别的,不是通用的坐标系。对于任何力学系统,都有许许多多坐标系可用来表述。比如,我们要研究物体在球面上的运动,比如地球表面上的运动。在这个问题里,笛卡尔坐标系就很不方便,更自然的坐标系是两个角度:经度和维度。更一般的情况,物体沿曲线滚动,比如沿山坡滚动,这个问题就没有特别的坐标系。所以,这里提出一个重要的问题,是否能想出一个通用的方法建立经典力学方程,并且这个方法能任何坐标系。
考虑一个抽象问题,体系用一广义坐标系表述。我们把
我们还需要表示出速度,在这个抽象问题里,速度为广义坐标
在广义坐标系里,运动方程可能很复杂,但作用量原理总是适用的。经典物理所有体系——甚至波和场——都可以用拉格朗日量描述。有时候,拉格朗日量可由已知的知识计算得到。比如由莱尼坐标系的拉格朗日量可计算得到乔治坐标系的拉格朗日量。有时候,拉格朗日量可由某些理论偏好或原理猜测。但是,拉格朗日量不管是怎么得到,都能简洁地概括所有的运动方程。
为什么所有的体系都要用作用量原理和拉格朗日量描述?这个问题不容易回答,但是,能知道背后的原因与经典物理的量子起源密切相关,还与能量守恒密切相关。眼下,我们只先接受这一点,经典物理的所有已知的体系都可以用作用量描述。
拉格朗日量是广义坐标和广义速度的函数,
这意味着所得方程为欧拉-拉格朗日方程的形式,为经典力学运动方程的一般形式。每个
即所有的理论物理都在这个方程里。如果你知道
现在我们细看一下方程(
共轭动量的概念超越了动量的通常的定义(质量与速度之积)。共轭动量由拉格朗日量而定,可能不是具有明显物理意义的量,但是总可以定义为:
引入广义动量,欧拉-拉格朗日方程变为:
我们从极坐标描述的单个质点做些说明。此时,广义坐标
对应的运动方程:
又
角
这个物理量正是质点的角动量。角动量与
现在考虑
换言之,角动量守恒。方程(
我们可以看出
| 练习5:用以上方法推导摆长为 |
|---|
循环坐标
zhi
如前文所见,有时候有些坐标不会出现在拉格朗日量里。这种坐标被称为循环坐标。我也不知道这里“循环”是什么意思?
我们知道的是,改变循环坐标的值,拉格朗日量不变,循环坐标的共轭动量守恒。角动量就是一个例子。另一个例子就是普通动量,即线动量。对于单个质点,拉格朗日量为:
这个拉格朗日量里没有任何坐标,因此三个笛卡尔坐标都是循环坐标。(这里没什么东西在循环,只是用了这个词而已。)因此,动量的各个分量都是守恒的。如果势能显含某个坐标,则相应的动量的分量则不守恒。
我们再看另外一个例子:两个质点沿直线运动,它们之间的势能函数是两质点之间距离的函数。为简单起见,我们只考虑两质点具有相同质量的情况,这不会使问题失去一般性。两个质点的坐标分别为
拉格朗日量显含
但是,这里漏掉了重要一点。我们变换一下坐标。定义
用这两个新坐标可重写拉格朗日量。动能为
| 练习6:推导出上式。 |
|---|
重点在于势能,它只是
换言之,这个体系有个隐含的循环坐标,即
真正的重点不在于循环坐标,而是在下一讲,对称性。
