@Pigmon
2018-07-23T09:29:47.000000Z
字数 537
阅读 1791
遥控驾驶模块说明
会议记录
车端
1. 中心通信模块
发送:将从CAN总线读取的车辆状态发送给管控中心。
接收:接收从管控中心发送过来的车辆控制命令。(遥控)
2. 车辆控制模块
主要功能:
对接遥控的控制信号和CAN命令,将遥控信号翻译成车辆控制协议,发送给CAN总线。
接口如:设置方向盘转角,设置制动、驱动踏板开度,设置挡位等。各接口内封装了将遥控控制信号翻译成对应的CAN命令的功能。
3. CAN总线模块
读取:读取车辆状态信息。
写入:将车辆控制模块整合的CAN命令下发给车辆,进而控制车辆。
车辆状态包括:实时速度,实时方向盘转角,车辆位姿信息等。(详细内容有待进一步总结,在确定可靠性功能后)
中心端
1. 视频显示
抓取车端 IP Camera 的视频流进行显示。并对视频的质量和摄像头数量等进行设置。
2. 遥控输入
将驾驶模拟器的方向盘套件的输入信号转换成遥控控制信号。
3. 通信
发送:将遥控控制信号发送给车端。
接收:接收车辆状态信息。
4. 车辆管理
对管控中心管理车辆数据的增删查改;
当前车辆切换。
5. 用户界面
中心驾驶员操作界面,主要功能包括:
- 车辆回传视频显示和操作接口
- 车辆回传状态信息显示
- 遥控控制信号显示
- GPS地图展示
- 非当前车辆信息
- 车辆管理界面
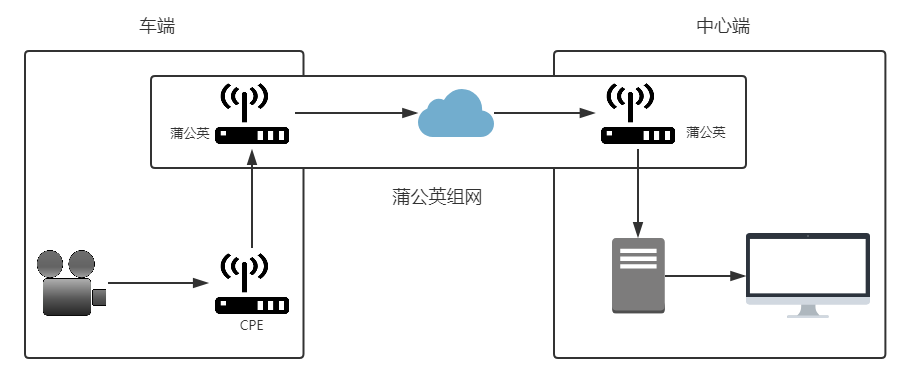
数据流展示图
- 遥控控制信号数据流

- 车辆状态信息数据流

- 视频回传数据流