@Pigmon
2021-06-04T05:23:58.000000Z
字数 1979
阅读 1067
铁建错误编码发送到遥控端的接收说明
遥控
1. 简述
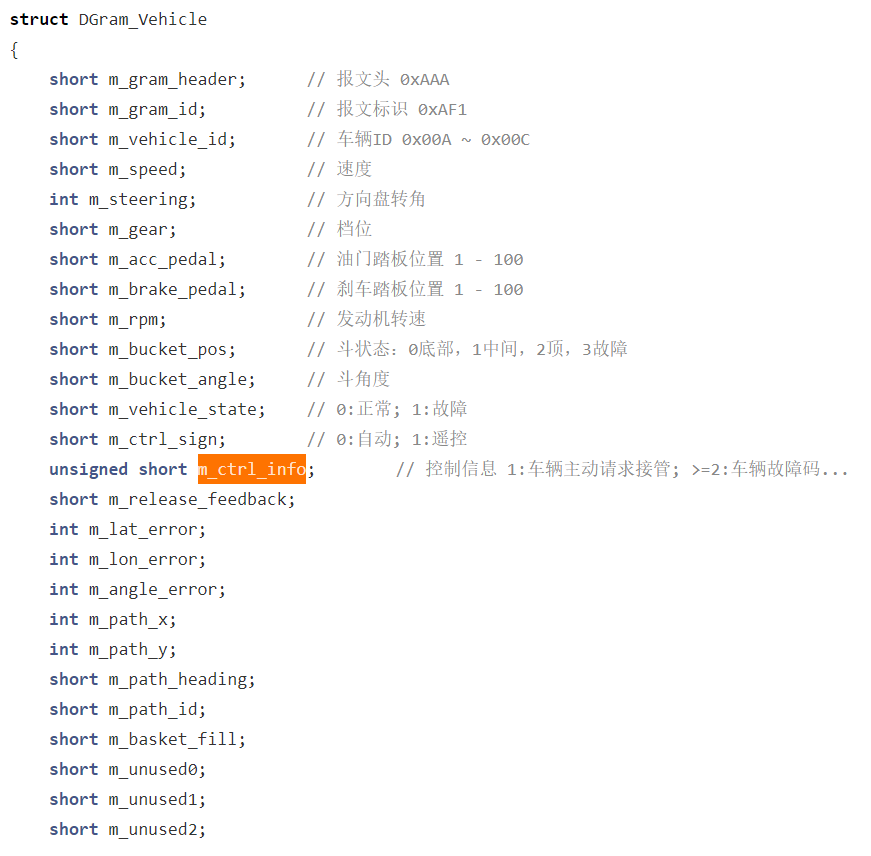
错误代码在遥控驾驶系统最基本的车辆上行报文中,具体字段如下图所示:
2. 遥控端接收方法示例
using System;using System.Collections.Generic;using System.Linq;using System.Text;using System.Threading.Tasks;namespace TestCSharp{class Program{static ushort ERRDET_GPS_LOSS = 0x0004;static ushort ERRDET_IMU_LOSS = 0x0008;static ushort ERRDET_LIDAR_LOSS = 0x0010;static ushort ERRDET_POSTYPE = 0X0080;static ushort ERRDET_OUTOFPATH = 0X0100;static void Main(string[] args){ushort err_msg = (ushort)(ERRDET_GPS_LOSS | ERRDET_LIDAR_LOSS | ERRDET_OUTOFPATH);string msg1 = ErrorToString(err_msg);string msg2 = ErrorToString_Single(err_msg);Console.WriteLine("多个错误一起显示的方式:" + msg1);Console.WriteLine("只显示一个错误的方式:" + msg2);}/// <summary>/// 如果有多个错误,全部显示的函数;/// </summary>/// <param name="_err_msg">车辆上行报文中m_ctrl_info 的数值</param>/// <returns>代表错误的字符串</returns>static string ErrorToString(ushort _err_msg){string ret = "";bool location_error = (_err_msg & ERRDET_GPS_LOSS) == ERRDET_GPS_LOSS ||(_err_msg & ERRDET_IMU_LOSS) == ERRDET_IMU_LOSS ||(_err_msg & ERRDET_POSTYPE) == ERRDET_POSTYPE;bool lidar_error = (_err_msg & ERRDET_LIDAR_LOSS) == ERRDET_LIDAR_LOSS;bool path_error = (_err_msg & ERRDET_OUTOFPATH) == ERRDET_OUTOFPATH;bool is_error = location_error || lidar_error || path_error;if (is_error){if (location_error)ret += "定位系统故障;";if (lidar_error)ret += "激光雷达故障;";if (path_error)ret += "行驶异常;";}elseret += "正常";return ret;}/// <summary>/// 同时发生多个错误,但只显示其中一个错误的函数/// </summary>/// <param name="_err_msg">车辆上行报文中m_ctrl_info 的数值</param>/// <returns>代表错误的字符串</returns>static string ErrorToString_Single(ushort _err_msg){string ret = "";bool location_error = (_err_msg & ERRDET_GPS_LOSS) == ERRDET_GPS_LOSS ||(_err_msg & ERRDET_IMU_LOSS) == ERRDET_IMU_LOSS ||(_err_msg & ERRDET_POSTYPE) == ERRDET_POSTYPE;bool lidar_error = (_err_msg & ERRDET_LIDAR_LOSS) == ERRDET_LIDAR_LOSS;bool path_error = (_err_msg & ERRDET_OUTOFPATH) == ERRDET_OUTOFPATH;bool is_error = location_error || lidar_error || path_error;// 假设错误显示优先级从高到低依次为:// 1. 定位问题;// 2. 行驶异常;// 3. 激光雷达故障;if (location_error)ret += "定位系统故障;";else if (path_error)ret += "行驶异常;";else if (lidar_error)ret += "激光雷达故障;";elseret += "正常";return ret;}}}
